


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (12): 4021-4029.DOI: 10.11772/j.issn.1001-9081.2024121811
• Multimedia computing and computer simulation • Previous Articles Next Articles
Hailin XIAO1( ), Bo TIAN1, Bin HU1, Xiangting KONG1, Yuanyuan WU1, Renyu MA2, Zhongshan ZHANG3
), Bo TIAN1, Bin HU1, Xiangting KONG1, Yuanyuan WU1, Renyu MA2, Zhongshan ZHANG3
Received:2024-12-25
Revised:2025-04-01
Accepted:2025-04-02
Online:2025-04-15
Published:2025-12-10
Contact:
Hailin XIAO
About author:TIAN Bo, born in 1999, M. S. candidate. His research interests include target detection, image processing.Supported by:
肖海林1(), 田波1, 胡彬1, 孔祥婷1, 吴媛媛1, 马仁煜2, 张中山3
通讯作者:
肖海林
作者简介:田波(1999—),男(土家族),湖北恩施人,硕士研究生,主要研究方向:目标检测、图像处理基金资助:CLC Number:
Hailin XIAO, Bo TIAN, Bin HU, Xiangting KONG, Yuanyuan WU, Renyu MA, Zhongshan ZHANG. Multi-scale small target detection algorithm for UAV perspective based on channel-prior multi-scale cross-axis attention-YOLO[J]. Journal of Computer Applications, 2025, 45(12): 4021-4029.
肖海林, 田波, 胡彬, 孔祥婷, 吴媛媛, 马仁煜, 张中山. 基于信道先验多尺度跨轴注意YOLO的无人机视角下多尺度小目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(12): 4021-4029.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024121811
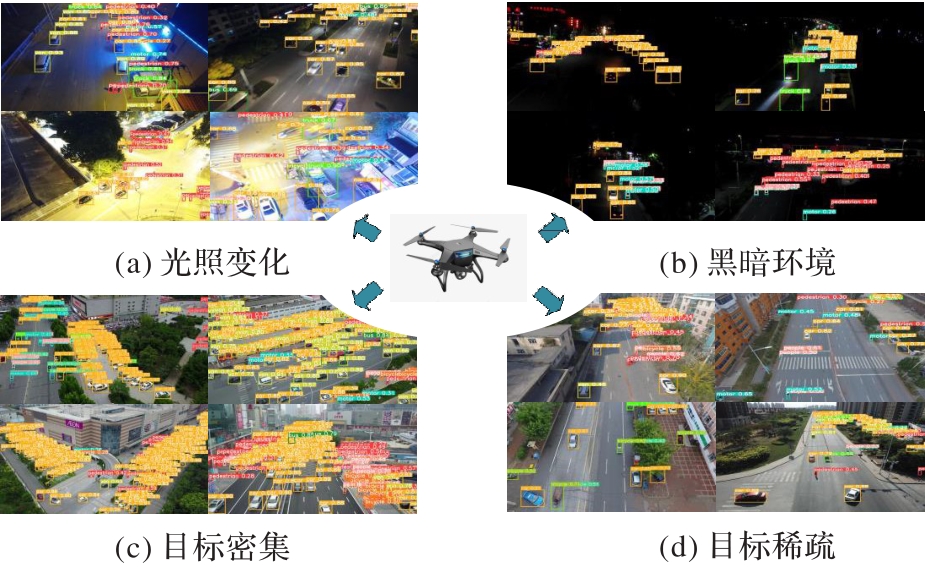
Fig.1 Issues in traffic monitoring from UAV perspective
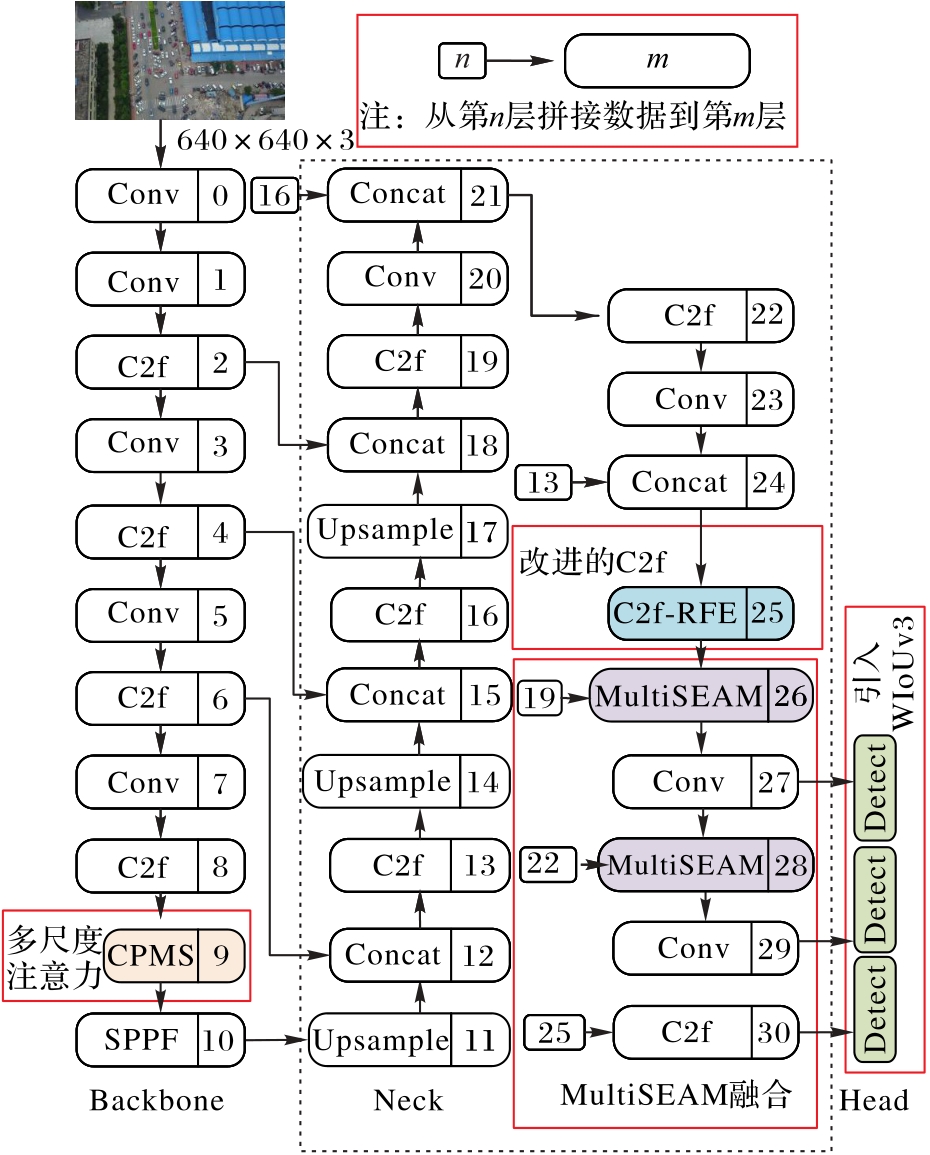
Fig.2 Structure of proposed algorithm
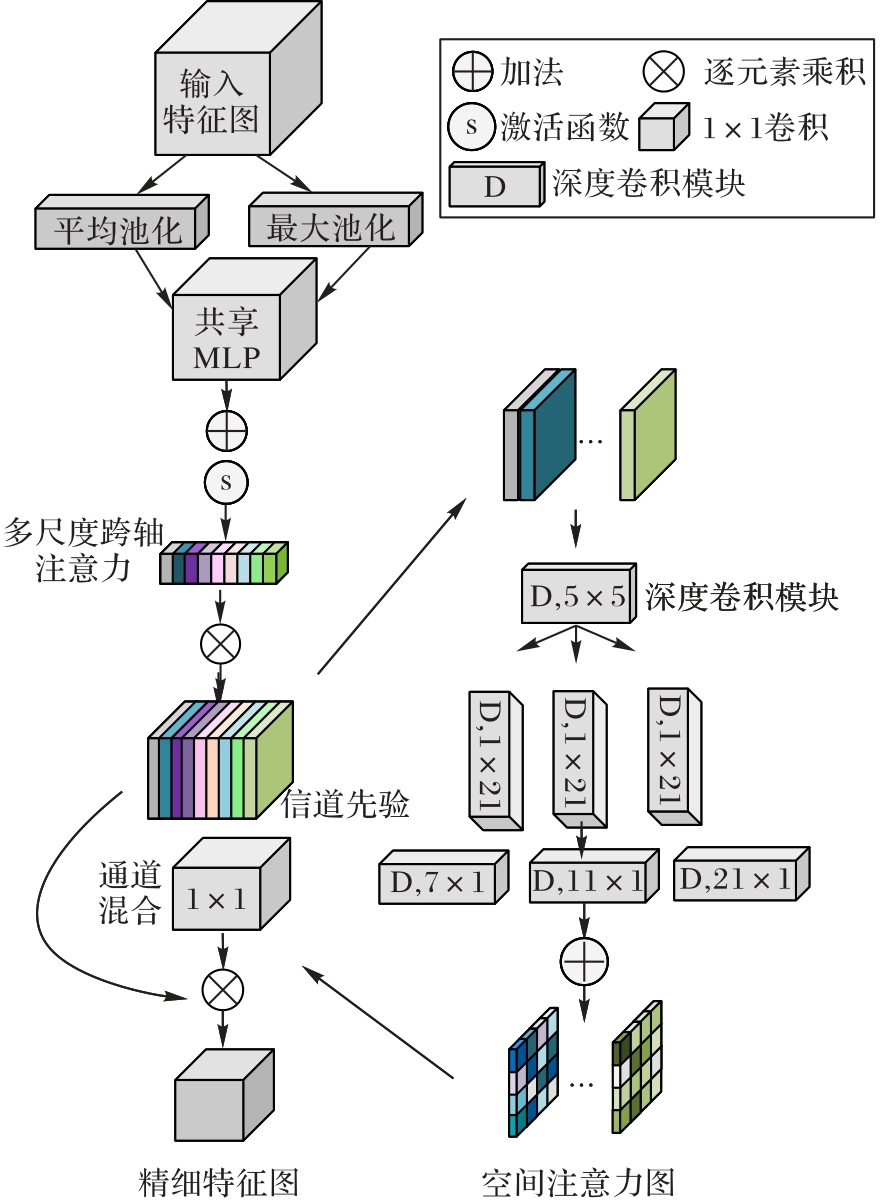
Fig.3 Structure of CPMS
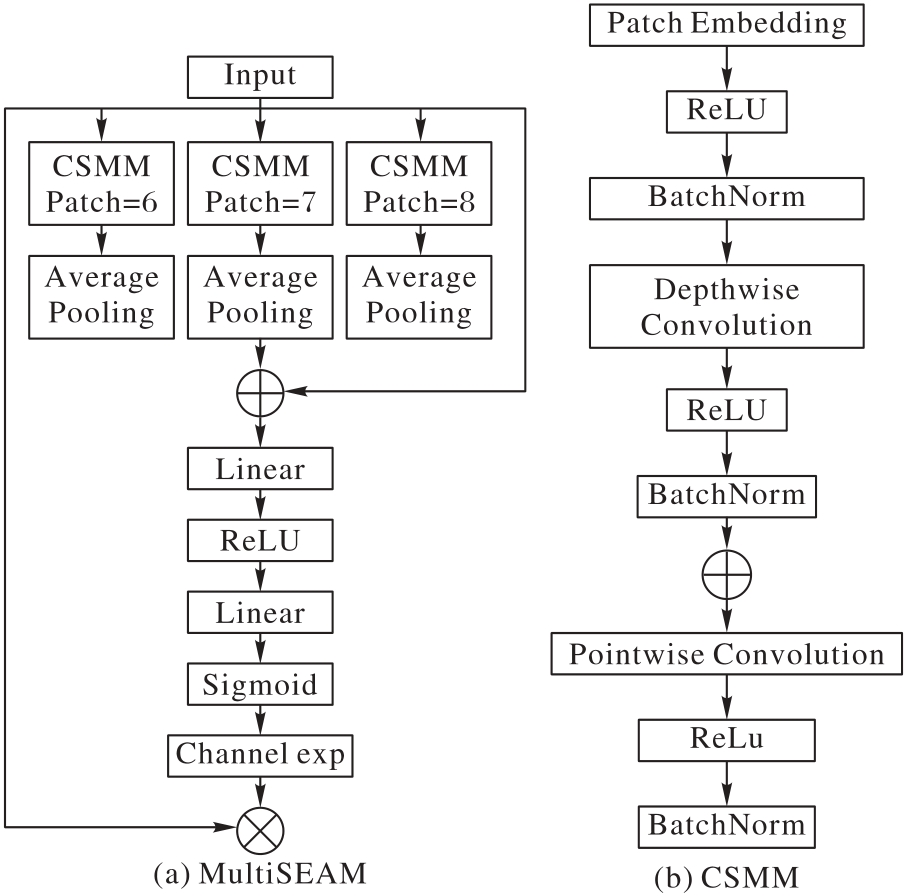
Fig.4 MultiSEAM
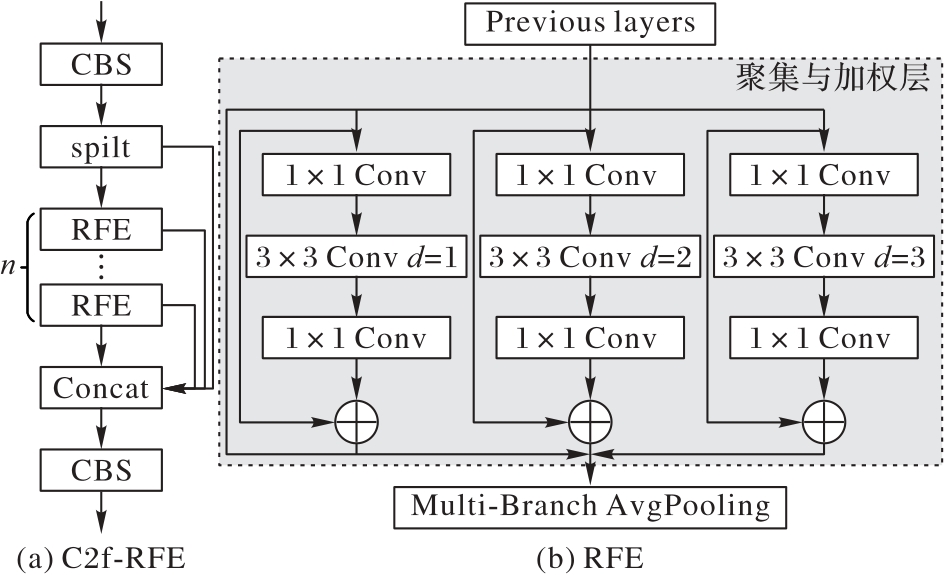
Fig.5 C2f-RFE and RFE Module
| 参数名称 | 设置 | 参数名称 | 设置 |
|---|---|---|---|
| 轮数 | 300 | 预热周期 | 3.0 |
| 图片大小 | 640 | 初始学习率 | 0.01 |
| 批量大小 | 16 | 最终学习率 | 0.01 |
| 线程数 | 4 | 学习率动量 | 0.937 |
| 1.9 | 权重衰减 | 0.005 | |
| 3 | 优化器 | SGD |
Tab. 1 Experimental parameter setting
| 参数名称 | 设置 | 参数名称 | 设置 |
|---|---|---|---|
| 轮数 | 300 | 预热周期 | 3.0 |
| 图片大小 | 640 | 初始学习率 | 0.01 |
| 批量大小 | 16 | 最终学习率 | 0.01 |
| 线程数 | 4 | 学习率动量 | 0.937 |
| 1.9 | 权重衰减 | 0.005 | |
| 3 | 优化器 | SGD |
| 损失函数 | 精确率 | 召回率 | mAP50 | mAP50-95 |
|---|---|---|---|---|
| EIoU | 49.1 | 38.0 | 38.7 | 23.4 |
| CIoU | 50.9 | 38.2 | 39.3 | 23.5 |
| SIoU | 51.5 | 38.5 | 39.4 | 23.4 |
| WIoUv1 | 50.1 | 38.5 | 39.3 | 23.3 |
| WIoUv2 | 50.6 | 38.4 | 39.3 | 23.2 |
| WIoUv3 | 51.3 | 38.6 | 40.0 | 23.6 |
Tab.2 Comparison of different loss functions
| 损失函数 | 精确率 | 召回率 | mAP50 | mAP50-95 |
|---|---|---|---|---|
| EIoU | 49.1 | 38.0 | 38.7 | 23.4 |
| CIoU | 50.9 | 38.2 | 39.3 | 23.5 |
| SIoU | 51.5 | 38.5 | 39.4 | 23.4 |
| WIoUv1 | 50.1 | 38.5 | 39.3 | 23.3 |
| WIoUv2 | 50.6 | 38.4 | 39.3 | 23.2 |
| WIoUv3 | 51.3 | 38.6 | 40.0 | 23.6 |
| 算法 | AP/% | mAP/ % | 帧率/ (frame·s-1) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | People | Bicycle | Car | Van | Truck | Tricycle | Awning-Tricycle | Bus | Motor | |||
| YOLOV8s | 42.7 | 32.0 | 12.4 | 79.1 | 44.0 | 36.5 | 28.1 | 15.9 | 57.0 | 44.9 | 39.3 | 100.3 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 42.3 | 34.2 | 17.0 | 62.1 | 53.4 | 45.6 | 108.5 |
Tab.3 Comparison of detection precision and FPS between proposed algorithm and baseline algorithm YOLOv8s (VisDrone2019)
| 算法 | AP/% | mAP/ % | 帧率/ (frame·s-1) | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | People | Bicycle | Car | Van | Truck | Tricycle | Awning-Tricycle | Bus | Motor | |||
| YOLOV8s | 42.7 | 32.0 | 12.4 | 79.1 | 44.0 | 36.5 | 28.1 | 15.9 | 57.0 | 44.9 | 39.3 | 100.3 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 42.3 | 34.2 | 17.0 | 62.1 | 53.4 | 45.6 | 108.5 |
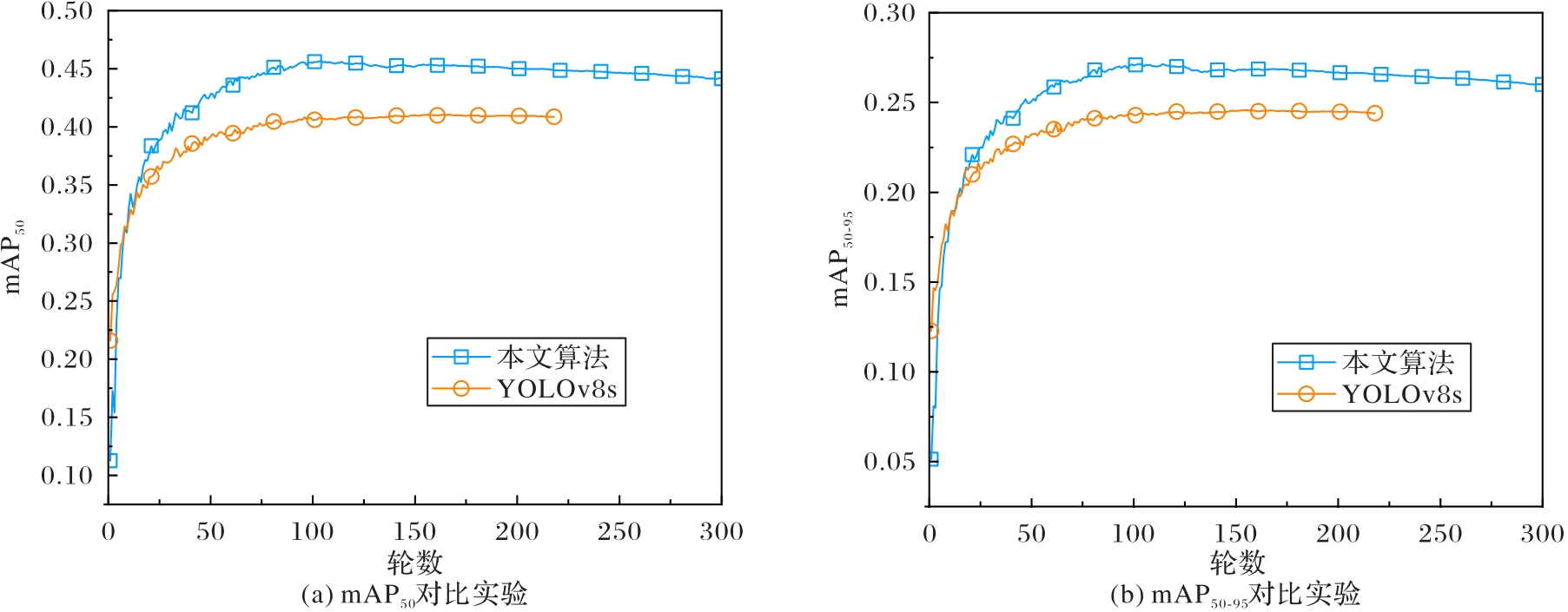
Fig.6 Comparison experimental results of proposed algorithm and baseline algorithm (VisDrone2019)
| 算法 | AP/% | mAP50 /% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | Person | Bicycle | Car | Van | Truck | Tricycle | Awning-tricycle | Bus | Motor | ||
| Faster R-CNN[ | 20.9 | 14.8 | 7.3 | 51.0 | 29.7 | 19.5 | 14.0 | 8.8 | 30.5 | 21.2 | 21.8 |
| Cascade R-CNN[ | 22.2 | 14.8 | 7.6 | 54.6 | 31.5 | 21.6 | 14.8 | 8.6 | 34.9 | 21.4 | 23.2 |
| CenterNet[ | 22.6 | 20.6 | 14.6 | 59.7 | 24.0 | 21.3 | 20.1 | 17.4 | 37.9 | 23.7 | 26.2 |
| DMNet[ | 28.5 | 20.4 | 15.9 | 56.8 | 37.9 | 30.1 | 22.6 | 14.0 | 47.1 | 29.2 | 30.3 |
| CDNet[ | 35.6 | 19.2 | 13.8 | 55.8 | 42.1 | 38.2 | 33.0 | 25.4 | 49.5 | 29.3 | 34.2 |
| HR-Cascade[ | 32.6 | 17.3 | 11.1 | 54.7 | 42.4 | 35.3 | 32.7 | 24.1 | 46.5 | 28.2 | 32.5 |
| MSC-CenterNet[ | 33.7 | 15.2 | 12.1 | 55.2 | 40.5 | 34.1 | 29.2 | 21.6 | 42.2 | 27.5 | 31.1 |
| FPN[ | 33.0 | 25.8 | 13.9 | 69.4 | 40.0 | 34.3 | 27.4 | 13.4 | 49.1 | 37.6 | 35.6 |
| YOLOv3[ | 18.1 | 9.9 | 2.0 | 56.6 | 17.5 | 17.6 | 6.7 | 2.9 | 32.4 | 17.0 | 17.1 |
| SlimYOLOv3[ | 17.4 | 9.3 | 2.4 | 55.7 | 18.3 | 16.9 | 9.1 | 3.0 | 26.9 | 17.0 | 17.6 |
| YOLOv3-LITE[ | 34.5 | 23.4 | 7.9 | 70.8 | 31.3 | 21.9 | 15.3 | 6.2 | 40.9 | 32.7 | 28.5 |
| YOLOv4[ | 24.8 | 12.6 | 8.6 | 64.3 | 22.4 | 22.7 | 11.4 | 7.6 | 44.3 | 21.7 | 30.7 |
| Modifies YOLOv4[ | 28.2 | 15.9 | 5.8 | 65.7 | 25.2 | 26.1 | 13.8 | 8.1 | 40.2 | 26.1 | 32.5 |
| YOLOv5s[ | 40.8 | 32.6 | 13.6 | 74.6 | 37.6 | 32.8 | 21.9 | 12.5 | 44.9 | 40.0 | 35.1 |
| MSA-YOLO[ | 33.4 | 17.3 | 11.2 | 76.8 | 41.5 | 41.4 | 14.8 | 18.4 | 60.9 | 31.0 | 34.7 |
| YOLOv8[ | 50.2 | 39.7 | 21.3 | 74.8 | 50.5 | 46.2 | 33.3 | 22.1 | 67.4 | 45.3 | 45.1 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 41.0 | 34.2 | 17.0 | 62.1 | 53.4 | 45.7 |
Tab.4 Comparison of AP and mAP50 of different target detection algorithms on VisDrone2019 dataset
| 算法 | AP/% | mAP50 /% | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| Pedestrian | Person | Bicycle | Car | Van | Truck | Tricycle | Awning-tricycle | Bus | Motor | ||
| Faster R-CNN[ | 20.9 | 14.8 | 7.3 | 51.0 | 29.7 | 19.5 | 14.0 | 8.8 | 30.5 | 21.2 | 21.8 |
| Cascade R-CNN[ | 22.2 | 14.8 | 7.6 | 54.6 | 31.5 | 21.6 | 14.8 | 8.6 | 34.9 | 21.4 | 23.2 |
| CenterNet[ | 22.6 | 20.6 | 14.6 | 59.7 | 24.0 | 21.3 | 20.1 | 17.4 | 37.9 | 23.7 | 26.2 |
| DMNet[ | 28.5 | 20.4 | 15.9 | 56.8 | 37.9 | 30.1 | 22.6 | 14.0 | 47.1 | 29.2 | 30.3 |
| CDNet[ | 35.6 | 19.2 | 13.8 | 55.8 | 42.1 | 38.2 | 33.0 | 25.4 | 49.5 | 29.3 | 34.2 |
| HR-Cascade[ | 32.6 | 17.3 | 11.1 | 54.7 | 42.4 | 35.3 | 32.7 | 24.1 | 46.5 | 28.2 | 32.5 |
| MSC-CenterNet[ | 33.7 | 15.2 | 12.1 | 55.2 | 40.5 | 34.1 | 29.2 | 21.6 | 42.2 | 27.5 | 31.1 |
| FPN[ | 33.0 | 25.8 | 13.9 | 69.4 | 40.0 | 34.3 | 27.4 | 13.4 | 49.1 | 37.6 | 35.6 |
| YOLOv3[ | 18.1 | 9.9 | 2.0 | 56.6 | 17.5 | 17.6 | 6.7 | 2.9 | 32.4 | 17.0 | 17.1 |
| SlimYOLOv3[ | 17.4 | 9.3 | 2.4 | 55.7 | 18.3 | 16.9 | 9.1 | 3.0 | 26.9 | 17.0 | 17.6 |
| YOLOv3-LITE[ | 34.5 | 23.4 | 7.9 | 70.8 | 31.3 | 21.9 | 15.3 | 6.2 | 40.9 | 32.7 | 28.5 |
| YOLOv4[ | 24.8 | 12.6 | 8.6 | 64.3 | 22.4 | 22.7 | 11.4 | 7.6 | 44.3 | 21.7 | 30.7 |
| Modifies YOLOv4[ | 28.2 | 15.9 | 5.8 | 65.7 | 25.2 | 26.1 | 13.8 | 8.1 | 40.2 | 26.1 | 32.5 |
| YOLOv5s[ | 40.8 | 32.6 | 13.6 | 74.6 | 37.6 | 32.8 | 21.9 | 12.5 | 44.9 | 40.0 | 35.1 |
| MSA-YOLO[ | 33.4 | 17.3 | 11.2 | 76.8 | 41.5 | 41.4 | 14.8 | 18.4 | 60.9 | 31.0 | 34.7 |
| YOLOv8[ | 50.2 | 39.7 | 21.3 | 74.8 | 50.5 | 46.2 | 33.3 | 22.1 | 67.4 | 45.3 | 45.1 |
| 本文算法 | 52.8 | 43.2 | 19.6 | 84.1 | 49.5 | 41.0 | 34.2 | 17.0 | 62.1 | 53.4 | 45.7 |
| 算法 | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 参数量/106 | 模型大小/MB | GFLOPs |
|---|---|---|---|---|---|---|---|
| YOLOv3-tiny | 92.3 | 75.9 | 87.3 | 65.2 | 12.1 | 24.4 | 18.9 |
| YOLOv5s | 97.6 | 96.7 | 99.1 | 80.1 | 9.1 | 17.7 | 24.0 |
| YOLOv6s | 97.4 | 96.8 | 99.1 | 81.2 | 16.3 | 32.8 | 44.9 |
| YOLOv8s | 97.7 | 97.2 | 99.2 | 83.8 | 11.1 | 21.5 | 28.7 |
| 本文算法 | 98.8 | 98.5 | 99.4 | 85.7 | 14.1 | 28.6 | 42.6 |
Tab. 5 Comparison experimental results of different target detection algorithms on UAVDT-M dataset
| 算法 | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 参数量/106 | 模型大小/MB | GFLOPs |
|---|---|---|---|---|---|---|---|
| YOLOv3-tiny | 92.3 | 75.9 | 87.3 | 65.2 | 12.1 | 24.4 | 18.9 |
| YOLOv5s | 97.6 | 96.7 | 99.1 | 80.1 | 9.1 | 17.7 | 24.0 |
| YOLOv6s | 97.4 | 96.8 | 99.1 | 81.2 | 16.3 | 32.8 | 44.9 |
| YOLOv8s | 97.7 | 97.2 | 99.2 | 83.8 | 11.1 | 21.5 | 28.7 |
| 本文算法 | 98.8 | 98.5 | 99.4 | 85.7 | 14.1 | 28.6 | 42.6 |
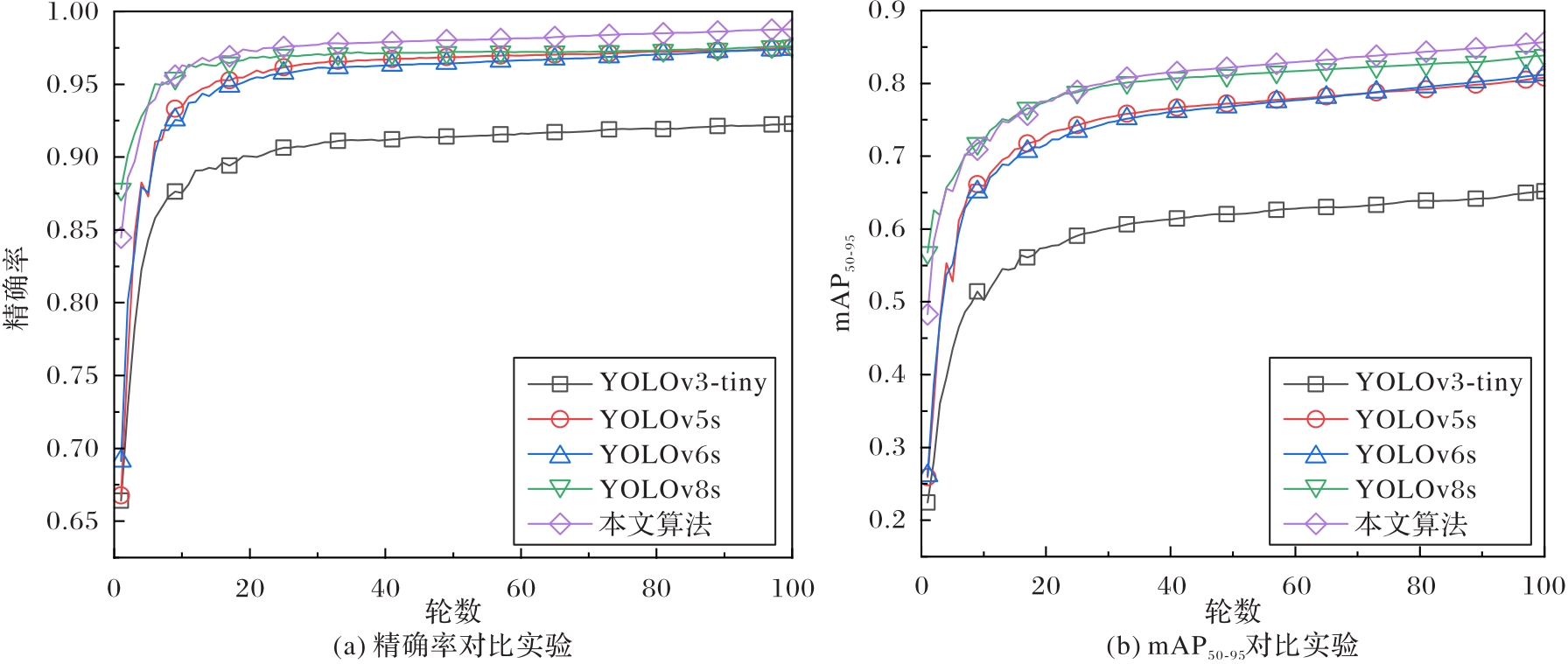
Fig. 7 Comparison experimental results of different algorithms in precision and mAP (VAVDT-M)
| 算法 | WIoUv3 | CPMS | MultiSEAM | C2f-RFE | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 模型大小/MB | 参数量/106 | GFLOPs |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 50.9 | 38.2 | 39.3 | 23.5 | 22.5 | 11.1 | 28.5 | ||||
| B | √ | 51.3 | 38.6 | 40.0 | 23.6 | 22.5 | 11.1 | 28.7 | |||
| C | √ | √ | 53.2 | 39.7 | 40.2 | 23.4 | 23.8 | 11.7 | 29.6 | ||
| D | √ | √ | √ | 55.1 | 42.3 | 44.8 | 26.4 | 29.0 | 14.3 | 39.1 | |
| E | √ | √ | √ | √ | 56.8 | 44.0 | 45.6 | 27.1 | 28.4 | 14.1 | 39.9 |
Tab.6 Ablation experimental results of different modules in proposed algorithm (VisDrone2019)
| 算法 | WIoUv3 | CPMS | MultiSEAM | C2f-RFE | 精确率/% | 召回率/% | mAP50 /% | mAP50-95 /% | 模型大小/MB | 参数量/106 | GFLOPs |
|---|---|---|---|---|---|---|---|---|---|---|---|
| A | 50.9 | 38.2 | 39.3 | 23.5 | 22.5 | 11.1 | 28.5 | ||||
| B | √ | 51.3 | 38.6 | 40.0 | 23.6 | 22.5 | 11.1 | 28.7 | |||
| C | √ | √ | 53.2 | 39.7 | 40.2 | 23.4 | 23.8 | 11.7 | 29.6 | ||
| D | √ | √ | √ | 55.1 | 42.3 | 44.8 | 26.4 | 29.0 | 14.3 | 39.1 | |
| E | √ | √ | √ | √ | 56.8 | 44.0 | 45.6 | 27.1 | 28.4 | 14.1 | 39.9 |
| 算法 | mAP50 /% | GFLOPs | 帧率/(frame·s-1) |
|---|---|---|---|
| YOLOv5s | 33.5 | 7.2 | 41.3 |
| YOLOv8m | 43.7 | 78.7 | 82.7 |
| YOLOv8l | 44.5 | 165.4 | 63.3 |
| YOLOv8s | 39.3 | 28.5 | 100.3 |
| BGF-YOLOv10[ | 42.0 | — | 44.0 |
| YOLO-DroneMS[ | 31.2 | — | 83.3 |
| 本文算法 | 45.7 | 39.9 | 108.5 |
Tab.7 Performance comparison of different target detection algorithms
| 算法 | mAP50 /% | GFLOPs | 帧率/(frame·s-1) |
|---|---|---|---|
| YOLOv5s | 33.5 | 7.2 | 41.3 |
| YOLOv8m | 43.7 | 78.7 | 82.7 |
| YOLOv8l | 44.5 | 165.4 | 63.3 |
| YOLOv8s | 39.3 | 28.5 | 100.3 |
| BGF-YOLOv10[ | 42.0 | — | 44.0 |
| YOLO-DroneMS[ | 31.2 | — | 83.3 |
| 本文算法 | 45.7 | 39.9 | 108.5 |

Fig.8 Low-light night-time environment

Fig.9 Complex background environment
| [1] | GANESAN R, RAAJINI X M, NAYYAR A, et al. BOLD: bio-inspired optimized leader election for multiple drones[J]. Sensors, 2020, 20(11): No.3134. |
| [2] | BAI Y, ZHAO H, ZHANG X, et al. Towards autonomous multi-UAV wireless network: a survey of reinforcement learning-based approaches[J]. IEEE Communications Surveys and Tutorials, 2023, 25(4): 3038-3067. |
| [3] | GUPTA A, AFRIN T, SCULLY E, et al. Advances of UAVs toward future transportation: the state-of-the-art, challenges, and opportunities[J]. Future Transportation, 2021, 1(2): 326-350. |
| [4] | HILDMANN H, KOVACS E. Review: using Unmanned Aerial Vehicles (UAVs) as Mobile Sensing Platforms (MSPs) for disaster response, civil security and public safety[J]. Drones, 2019, 3(3): No.59. |
| [5] | TRAN T M, VU T N, NGUYEN T V, et al. UIT-ADrone: a novel drone dataset for traffic anomaly detection[J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2023, 16: 5590-5601. |
| [6] | LU F, LI K, NIE Y, et al. Object detection of UAV images from orthographic perspective based on improved YOLOv5s[J]. Sustainability, 2023, 15(19): No.14564. |
| [7] | ZHANG H, SUN W, SUN C, et al. HSP-YOLOv8: UAV aerial photography small target detection algorithm[J]. Drones, 2024, 8(9): No.453. |
| [8] | NI J, ZHU S, TANG G, et al. A small-object detection model based on improved YOLOv8s for UAV image scenarios[J]. Remote Sensing, 2024, 16(13): No.2465. |
| [9] | LUO X, WU Y, ZHAO L. YOLOD: a target detection method for UAV aerial imagery[J]. Remote Sensing, 2022, 14(14): No.3240. |
| [10] | LI Y, FAN Q, HUANG H, et al. A modified YOLOv8 detection network for UAV aerial image recognition[J]. Drones, 2023, 7(5): No.304. |
| [11] | LOU H, DUAN X, GUO J, et al. DC-YOLOv8: small-size object detection algorithm based on camera sensor[J]. Electronics, 2023, 12(10): No.2323. |
| [12] | WANG G, CHEN Y, AN P, et al. UAV-YOLOv8: a small-object-detection model based on improved YOLOv8 for UAV aerial photography scenarios[J]. Sensors, 2023, 23(16): No.7190. |
| [13] | WANG F, WANG H, QIN Z, et al. UAV target detection algorithm based on improved YOLOv8[J]. IEEE Access, 2023, 11: 116534-116544. |
| [14] | 刘涛,鞠事宏,高一萌. 基于改进YOLOv8n的无人机视角下小目标检测算法[J]. 计算机应用, 2024, 44(11): 3603-3609. |
| LIU T, JU S H, GAO Y M. Small object detection algorithm from drone perspective based on improved YOLOv8n[J]. Journal of Computer Applications, 2024, 44(11): 3603-3609. | |
| [15] | MA B, HUA Z, WEN Y, et al. Using an improved lightweight YOLOv8 model for real-time detection of multi-stage apple fruit in complex orchard environments[J]. Artificial Intelligence in Agriculture, 2024, 11: 70-82. |
| [16] | ZHENG Z, WANG P, REN D, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation[J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| [17] | HUANG H, CHEN Z, ZOU Y, et al. Channel prior convolutional attention for medical image segmentation[J]. Computers in Biology and Medicine, 2024, 178: No.108784. |
| [18] | YU Z, HUANG H, CHEN W, et al. YOLO-FaceV2: a scale and occlusion aware face detector[J]. Pattern Recognition, 2024, 155: No.110714. |
| [19] | DENG L, BI L, LI H, et al. Lightweight aerial image object detection algorithm based on improved YOLOv5s[J]. Scientific Reports, 2023, 13: No.7817. |
| [20] | 张智,易华挥,郑锦. 聚焦小目标的航拍图像目标检测算法[J]. 电子学报, 2023, 51(4): 944-955. |
| ZHANG Z, YI H H, ZHENG J. Focusing on small objects detector in aerial images[J]. Acta Electronica Sinica, 2023, 51(4): 944-955. | |
| [21] | XU H, ZHENG W, LIU F, et al. Unmanned aerial vehicle perspective small target recognition algorithm based on improved YOLOv5[J]. Remote Sensing, 2023, 15(14): No.3583. |
| [22] | ALBABA B M, OZER S. SyNet: an ensemble network for object detection in UAV images[C]// Proceedings of the 25th International Conference on Pattern Recognition. Piscataway: IEEE, 2021: 10227-10234. |
| [23] | DU D, WEN L, ZHU P, et al. VisDrone-DET2020: the vision meets drone object detection in image challenge results[C]// Proceedings of the 2020 European Conference on Computer Vision Workshops, LNCS 12538. Cham: Springer, 2020: 692-712. |
| [24] | WAN Y, ZHONG Y, HUANG Y, et al. ARSD: an adaptive region selection object detection framework for UAV images[J]. Drones, 2022, 6(9): No.228. |
| [25] | ZHANG P, ZHONG Y, LI X. SlimYOLOv3: narrower, faster and better for real-time UAV applications[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision Workshops. Piscataway: IEEE, 2019: 37-45. |
| [26] | ZHAO H, ZHOU Y, ZHANG L, et al. Mixed YOLOv3-LITE: a lightweight real-time object detection method[J]. Sensors, 2020, 20(7): No.1816. |
| [27] | ALI S, SIDDIQUE A, ATEŞ H F, et al. Improved YOLOv4 for aerial object detection[C]// Proceedings of the 29th Signal Processing and Communications Applications Conference. Piscataway: IEEE, 2021: 1-4. |
| [28] | MA C, FU Y, WANG D, et al. YOLO-UAV: object detection method of unmanned aerial vehicle imagery based on efficient multi-scale feature fusion[J]. IEEE Access, 2023, 11: 126857-126878. |
| [29] | 冒国韬,邓天民,于楠晶. 基于多尺度分割注意力的无人机航拍图像目标检测算法[J]. 航空学报, 2023, 44(5): 273-283. |
| MAO G T, DENG T M, YU N J. Object detection in UAV images based on multi-scale split attention[J]. Acta Aeronautica et Astronautica Sinica, 2023, 44(5): 273-283. | |
| [30] | MEI J, ZHU W. BGF-YOLOv10: small object detection algorithm from unmanned aerial vehicle perspective based on improved YOLOv10[J]. Sensors, 2024, 24(21): No.6911. |
| [31] | ZHAO X, CHEN Y. YOLO-DroneMS: multi-scale object detection network for Unmanned Aerial Vehicle (UAV) images[J]. Drones, 2024, 8(11): No.609. |
| [1] | Xiaoyong BIAN, Peiyang YUAN, Qiren HU. Dual-coding space-frequency mixing method for infrared small target detection [J]. Journal of Computer Applications, 2026, 46(1): 252-259. |
| [2] | Tingting WANG, Tingshun LI, Wen TAN, Bo LYU, Yixuan CHEN. Cable temperature prediction model based on multi-scale patch and convolution interaction [J]. Journal of Computer Applications, 2026, 46(1): 314-321. |
| [3] | Chaoyun MAI, Hongyi ZHANG, Chuanbo QIN, Junying ZENG, Dong WANG. Multi-scale and spatial frequency feature-based image segmentation network for pheochromocytoma [J]. Journal of Computer Applications, 2026, 46(1): 280-288. |
| [4] | Yingjie MA, Jingying QIN, Geng ZHAO, Jing XIAO. Deep compressive sensing network for IoT images and its chaotic encryption protection method [J]. Journal of Computer Applications, 2026, 46(1): 144-151. |
| [5] | Yiming LIANG, Jing FAN, Wenze CHAI. Multi-scale feature fusion sentiment classification based on bidirectional cross attention [J]. Journal of Computer Applications, 2025, 45(9): 2773-2782. |
| [6] | Hengxian TANG, Yuan YAO, Haoxiang KANG. Research and implementation of large-scale unmanned aerial vehicle swarm simulation engine based on container [J]. Journal of Computer Applications, 2025, 45(8): 2704-2711. |
| [7] | Chengzhi YAN, Ying CHEN, Kai ZHONG, Han GAO. 3D object detection algorithm based on multi-scale network and axial attention [J]. Journal of Computer Applications, 2025, 45(8): 2537-2545. |
| [8] | Liang CHEN, Xuan WANG, Kun LEI. Helmet wearing detection algorithm for complex scenarios based on cross-layer multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(7): 2333-2341. |
| [9] | Danyang CHEN, Changlun ZHANG. Multi-scale decorrelation graph convolutional network model [J]. Journal of Computer Applications, 2025, 45(7): 2180-2187. |
| [10] | Bogan FAN, Shuqing WANG, Kaiyuan CHEN. Small target detection model for UAV aerial photography based on improved YOLOv8 [J]. Journal of Computer Applications, 2025, 45(7): 2342-2350. |
| [11] | Xiang WANG, Qianqian CUI, Xiaoming ZHANG, Jianchao WANG, Zhenzhou WANG, Jialin SONG. Wireless capsule endoscopy image classification model based on improved ConvNeXt [J]. Journal of Computer Applications, 2025, 45(6): 2016-2024. |
| [12] | Yingtao CHEN, Kangkang FANG, Jin’ao ZHANG, Haoran LIANG, Huanbin GUO, Zhaowen QIU. Segmentation network of coronary artery structure from CT angiography images based on multi-scale spatial features [J]. Journal of Computer Applications, 2025, 45(6): 2007-2015. |
| [13] | Tiantong ZHOU, Yanqi ZHENG, Tao WEI, Yakang DAI, Ling ZOU. Cognitive load EEG recognition model integrating variational graph autoencoder and local-global graph network [J]. Journal of Computer Applications, 2025, 45(6): 1849-1857. |
| [14] | Kunyuan JIANG, Xiaoxia LI, Li WANG, Yaodan CAO, Xiaoqiang ZHANG, Nan DING, Yingyue ZHOU. Boundary-cross supervised semantic segmentation network with decoupled residual self-attention [J]. Journal of Computer Applications, 2025, 45(4): 1120-1129. |
| [15] | Bingquan LIN, Lei LIU, Huafeng LI, Chen LIU. Secure cluster control of UAVs under DoS attacks based on APF and DDPG algorithm [J]. Journal of Computer Applications, 2025, 45(4): 1241-1248. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||