


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (6): 1998-2006.DOI: 10.11772/j.issn.1001-9081.2025060723
• Multimedia computing and computer simulation • Previous Articles
Zhenkai XIONG1,2( ), Mengjun XU1,2, Yinyin SUN3, Xin WANG4
), Mengjun XU1,2, Yinyin SUN3, Xin WANG4
Received:2025-06-30
Revised:2025-09-24
Accepted:2025-09-26
Online:2025-10-21
Published:2026-06-10
Contact:
Zhenkai XIONG
About author:XU Mengjun, born in 2001, M. S. candidate. His research interests include machine vision, artificial intelligence.Supported by:
熊珍凯1,2(), 徐梦军1,2, 孙胤胤3, 王鑫4
通讯作者:
熊珍凯
作者简介:徐梦军(2001—),男,安徽阜阳人,硕士研究生,主要研究方向:机器视觉、人工智能基金资助:CLC Number:
Zhenkai XIONG, Mengjun XU, Yinyin SUN, Xin WANG. Maritime ship detection algorithm under complex weather environments based on enhanced YOLOv8[J]. Journal of Computer Applications, 2026, 46(6): 1998-2006.
熊珍凯, 徐梦军, 孙胤胤, 王鑫. 基于改进YOLOv8的复杂天气环境下海面船舶检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(6): 1998-2006.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025060723
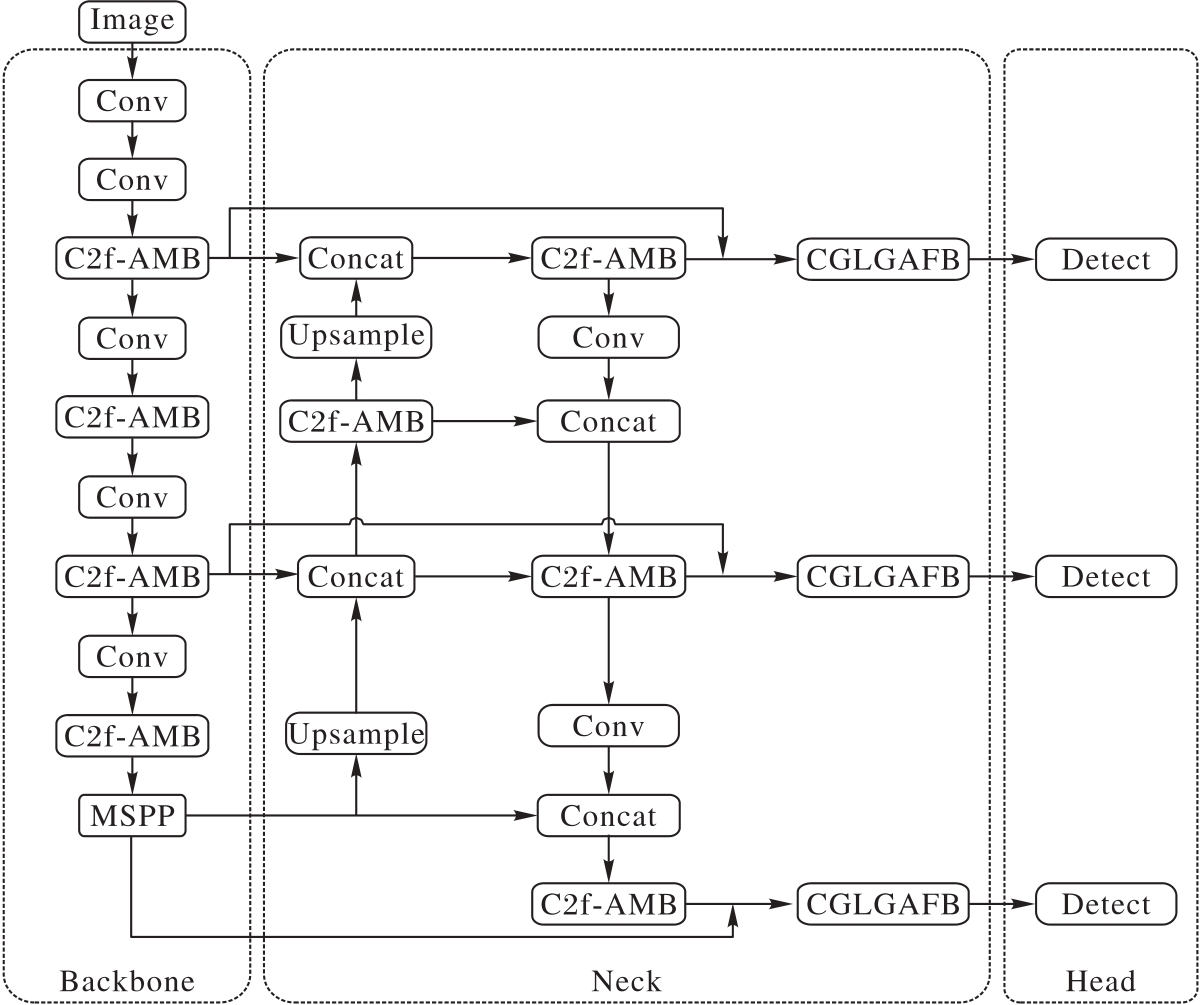
Fig. 1 Network structure of improved model
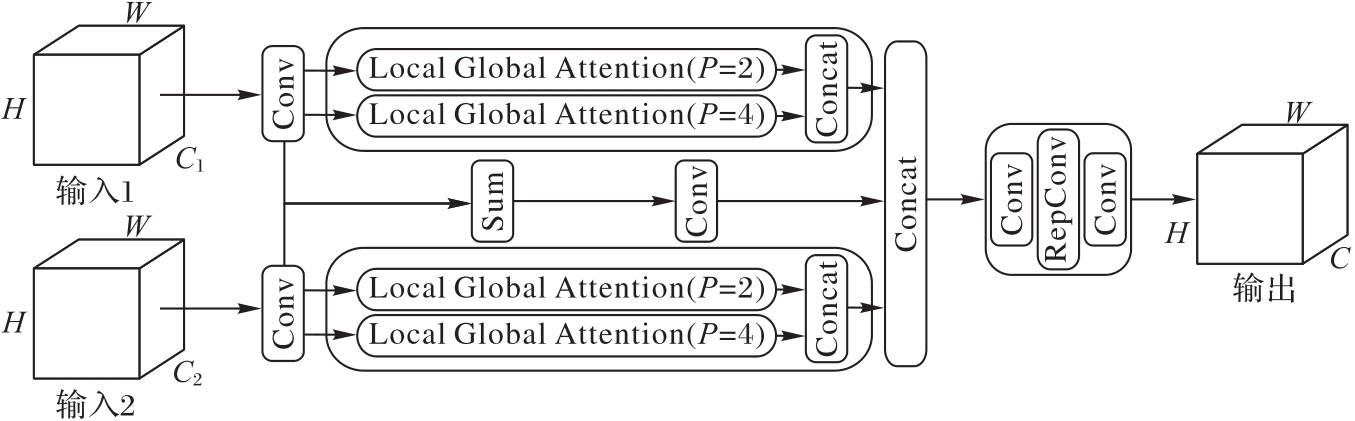
Fig. 2 Structure of CGLGAFB
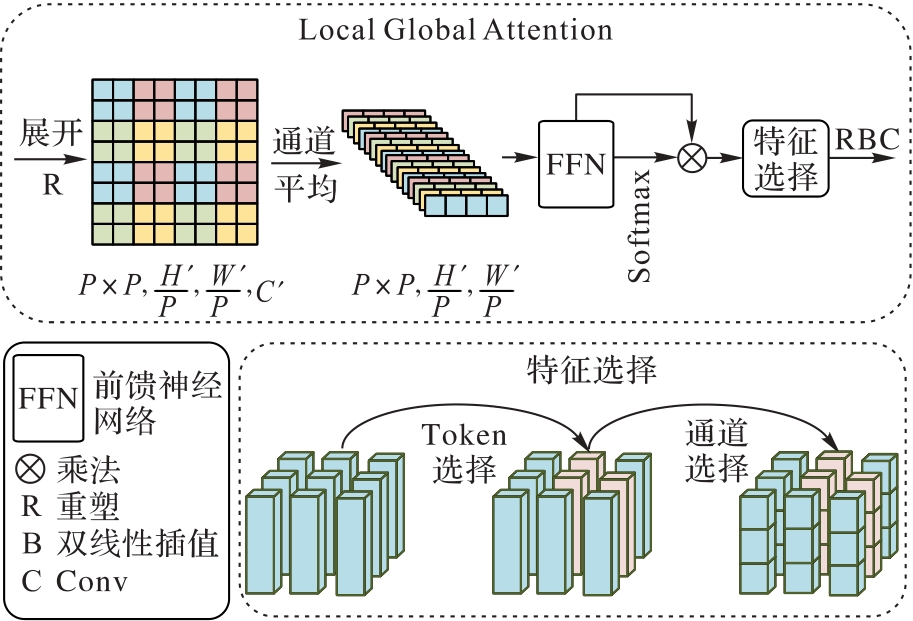
Fig. 3 Structure of Local Global Attention
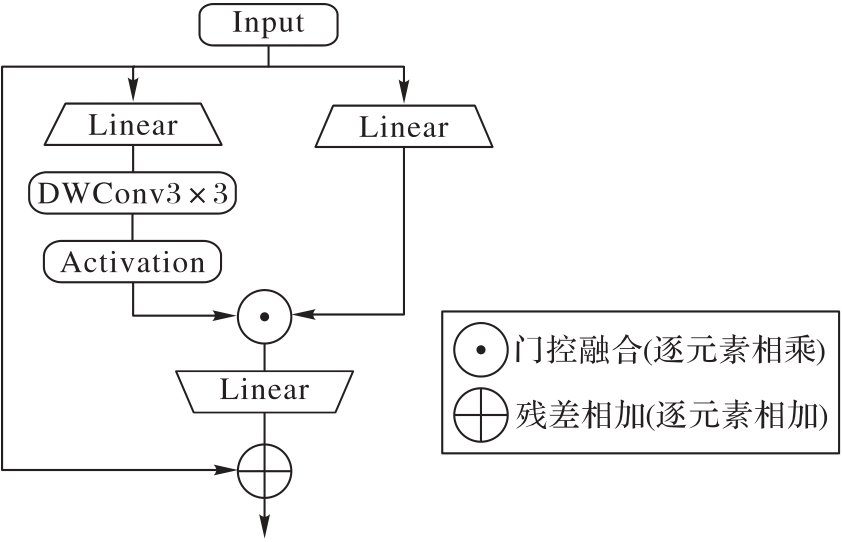
Fig. 4 Structure of CGLU
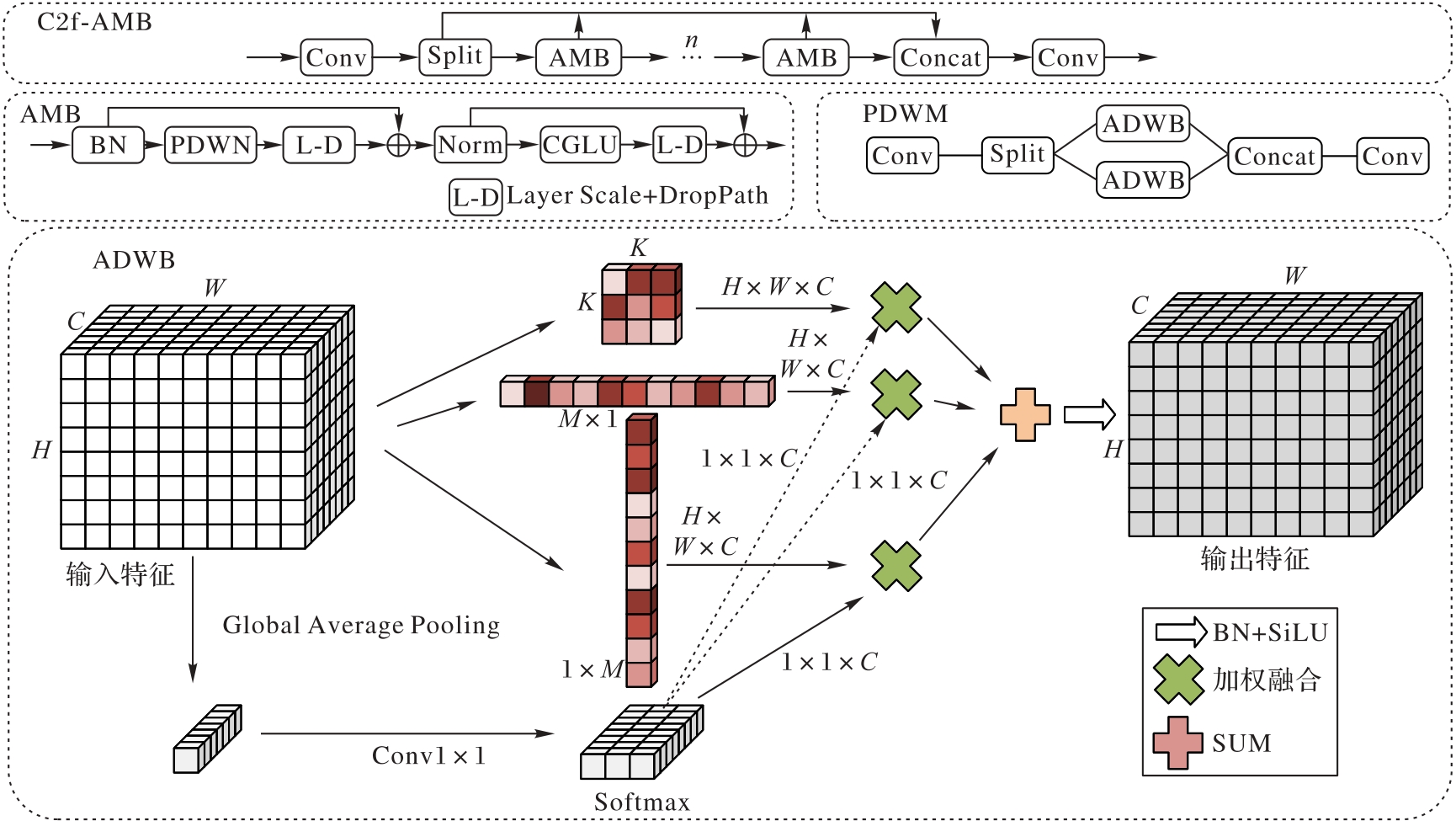
Fig. 5 Structure of C2f-AMB and its composition
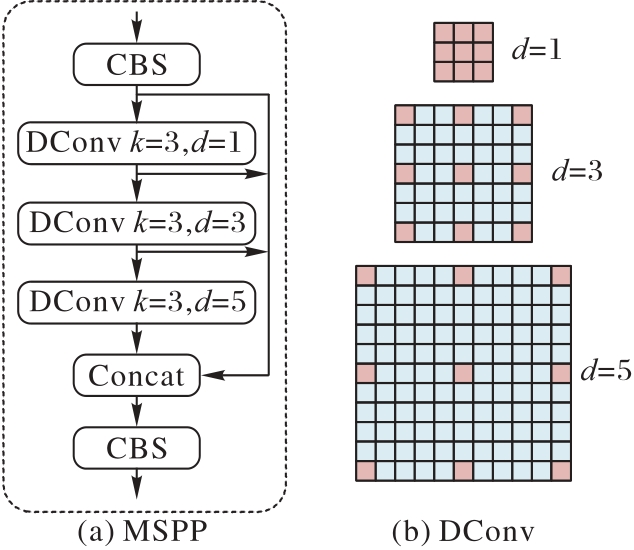
Fig.6 Structures of MSPP module and DConv
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 输入尺寸 | 640×640 | 优化器 | SGD |
| 初始学习率 | 1×10-2 | 动量 | 0.937 |
| 迭代次数 | 150 | 线程数 | 4 |
| 批量大小 | 32 | 热身轮数 | 3 |
Tab. 1 Training parameter setting
| 参数 | 值 | 参数 | 值 |
|---|---|---|---|
| 输入尺寸 | 640×640 | 优化器 | SGD |
| 初始学习率 | 1×10-2 | 动量 | 0.937 |
| 迭代次数 | 150 | 线程数 | 4 |
| 批量大小 | 32 | 热身轮数 | 3 |
| Baseline | ① | ② | ③ | mAP@50/ % | mAP@50-95/ % | Params | FLOPs/ 109 | Size/MB |
|---|---|---|---|---|---|---|---|---|
| √ | × | × | × | 0.821 | 0.563 | 3 006 818 | 8.1 | 6.2 |
| √ | √ | × | × | 0.839 | 0.580 | 3 807 842 | 9.3 | 8.0 |
| √ | × | √ | × | 0.837 | 0.554 | 2 339 190 | 6.3 | 4.8 |
| √ | × | × | √ | 0.834 | 0.568 | 3 154 274 | 8.1 | 6.5 |
| √ | √ | √ | √ | 0.847 | 0.571 | 3 287 670 | 7.5 | 6.7 |
Tab. 2 Ablation experiment results
| Baseline | ① | ② | ③ | mAP@50/ % | mAP@50-95/ % | Params | FLOPs/ 109 | Size/MB |
|---|---|---|---|---|---|---|---|---|
| √ | × | × | × | 0.821 | 0.563 | 3 006 818 | 8.1 | 6.2 |
| √ | √ | × | × | 0.839 | 0.580 | 3 807 842 | 9.3 | 8.0 |
| √ | × | √ | × | 0.837 | 0.554 | 2 339 190 | 6.3 | 4.8 |
| √ | × | × | √ | 0.834 | 0.568 | 3 154 274 | 8.1 | 6.5 |
| √ | √ | √ | √ | 0.847 | 0.571 | 3 287 670 | 7.5 | 6.7 |
| 模型 | P/% | R/% | mAP@50/ % | FLOPs/ 109 | Params/ 106 | Size/ MB |
|---|---|---|---|---|---|---|
| SSD | 61.7 | 78.0 | 62.5 | 30.7 | 24.4 | 187.6 |
| Faster R-CNN | 61.8 | 77.1 | 62.6 | 208.0 | 41.4 | 317.5 |
| YOLOXs | 63.4 | 79.6 | 64.9 | 7.6 | 5.0 | 70.4 |
| RTMDET-tiny | 65.1 | 80.0 | 65.7 | 30.7 | 24.4 | 31.7 |
| Cascade RCNN | 69.3 | 75.3 | 69.7 | 236.0 | 69.2 | 533.0 |
| DINO R-50 | 65.9 | 75.2 | 68.9 | 274.0 | 47.6 | 602.9 |
| YOLOV5s | 77.3 | 76.1 | 79.8 | 4.2 | 1.8 | 3.8 |
| YOLOV7-tiny | 79.6 | 76.7 | 80.6 | 13.1 | 6.0 | 11.7 |
| YOLOV10n | 83.0 | 74.0 | 80.9 | 6.5 | 2.3 | 5.7 |
| YOLO11n | 80.8 | 77.3 | 81.8 | 6.3 | 2.6 | 5.5 |
| YOLOV12n | 82.3 | 78.0 | 83.2 | 5.8 | 2.5 | 5.2 |
| YOLOV13n | 82.6 | 73.0 | 80.9 | 6.2 | 2.5 | 5.2 |
| Hyper-YOLO | 82.8 | 76.1 | 82.3 | 11.0 | 3.9 | 7.8 |
| YOLOV8n | 81.3 | 75.4 | 82.1 | 8.1 | 3.0 | 6.2 |
| 本文模型 | 83.3 | 79.3 | 84.7 | 7.5 | 3.3 | 6.7 |
Tab. 3 Comparison experiment results of different models
| 模型 | P/% | R/% | mAP@50/ % | FLOPs/ 109 | Params/ 106 | Size/ MB |
|---|---|---|---|---|---|---|
| SSD | 61.7 | 78.0 | 62.5 | 30.7 | 24.4 | 187.6 |
| Faster R-CNN | 61.8 | 77.1 | 62.6 | 208.0 | 41.4 | 317.5 |
| YOLOXs | 63.4 | 79.6 | 64.9 | 7.6 | 5.0 | 70.4 |
| RTMDET-tiny | 65.1 | 80.0 | 65.7 | 30.7 | 24.4 | 31.7 |
| Cascade RCNN | 69.3 | 75.3 | 69.7 | 236.0 | 69.2 | 533.0 |
| DINO R-50 | 65.9 | 75.2 | 68.9 | 274.0 | 47.6 | 602.9 |
| YOLOV5s | 77.3 | 76.1 | 79.8 | 4.2 | 1.8 | 3.8 |
| YOLOV7-tiny | 79.6 | 76.7 | 80.6 | 13.1 | 6.0 | 11.7 |
| YOLOV10n | 83.0 | 74.0 | 80.9 | 6.5 | 2.3 | 5.7 |
| YOLO11n | 80.8 | 77.3 | 81.8 | 6.3 | 2.6 | 5.5 |
| YOLOV12n | 82.3 | 78.0 | 83.2 | 5.8 | 2.5 | 5.2 |
| YOLOV13n | 82.6 | 73.0 | 80.9 | 6.2 | 2.5 | 5.2 |
| Hyper-YOLO | 82.8 | 76.1 | 82.3 | 11.0 | 3.9 | 7.8 |
| YOLOV8n | 81.3 | 75.4 | 82.1 | 8.1 | 3.0 | 6.2 |
| 本文模型 | 83.3 | 79.3 | 84.7 | 7.5 | 3.3 | 6.7 |
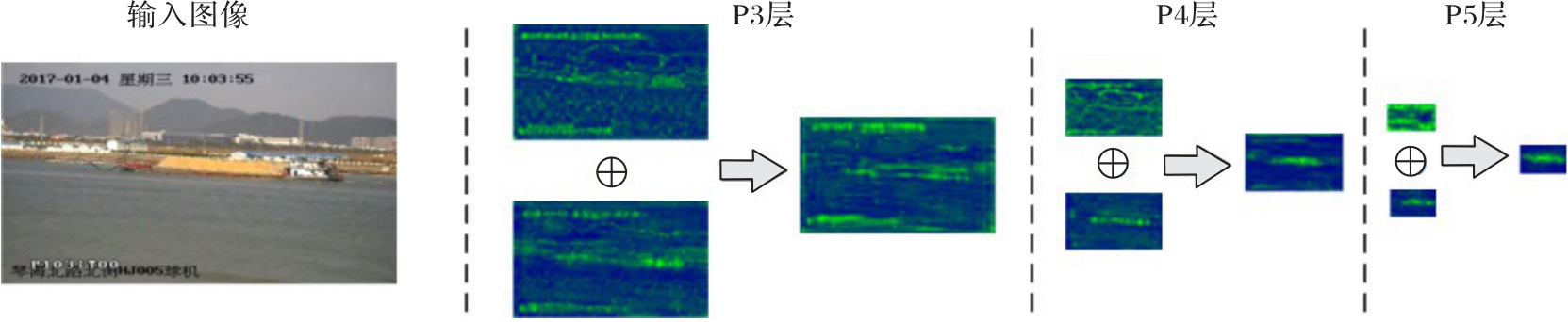
Fig. 7 Visualization of CGLGAFB feature fusion
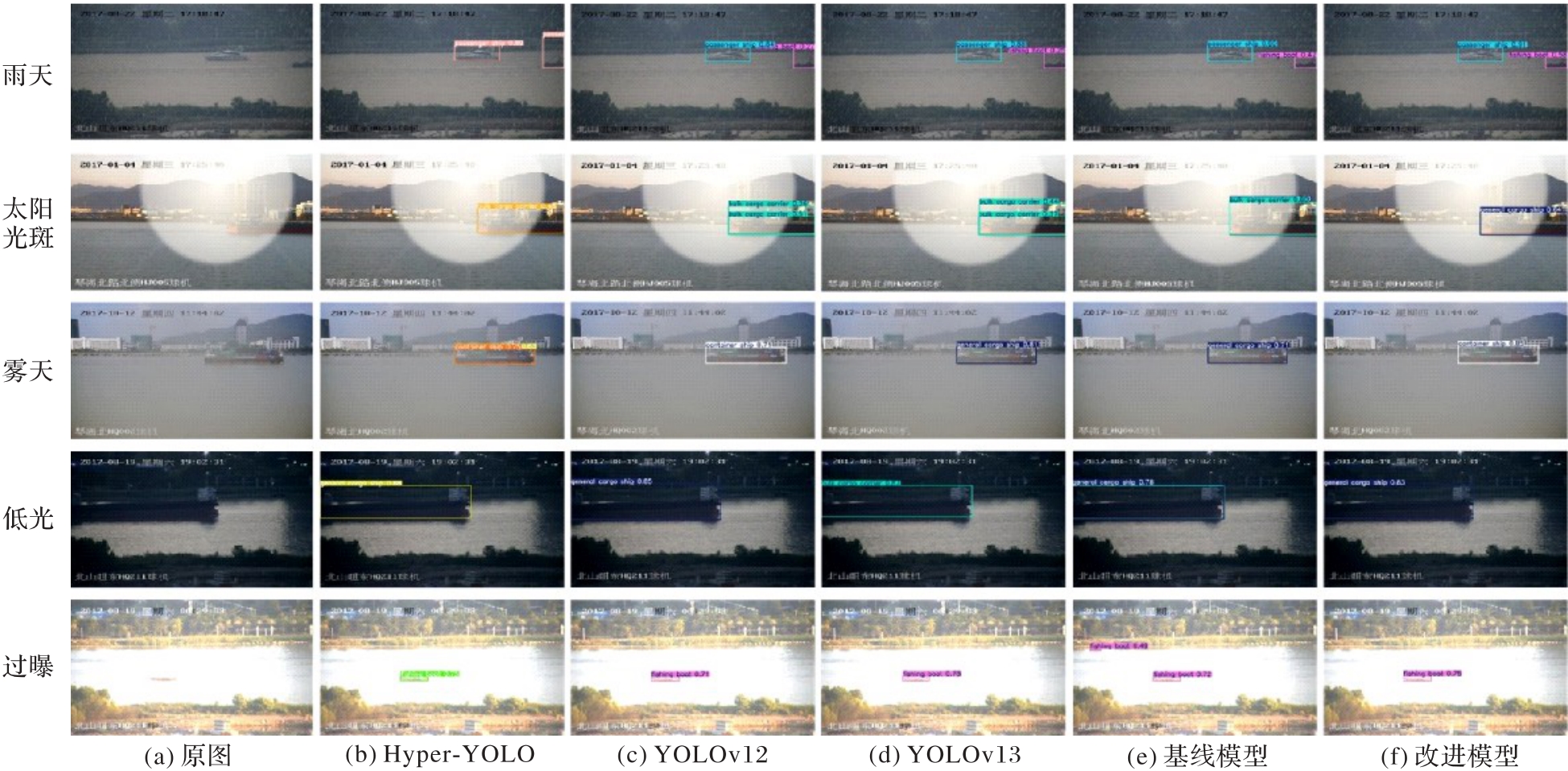
Fig. 8 Comparison of detection results among different models
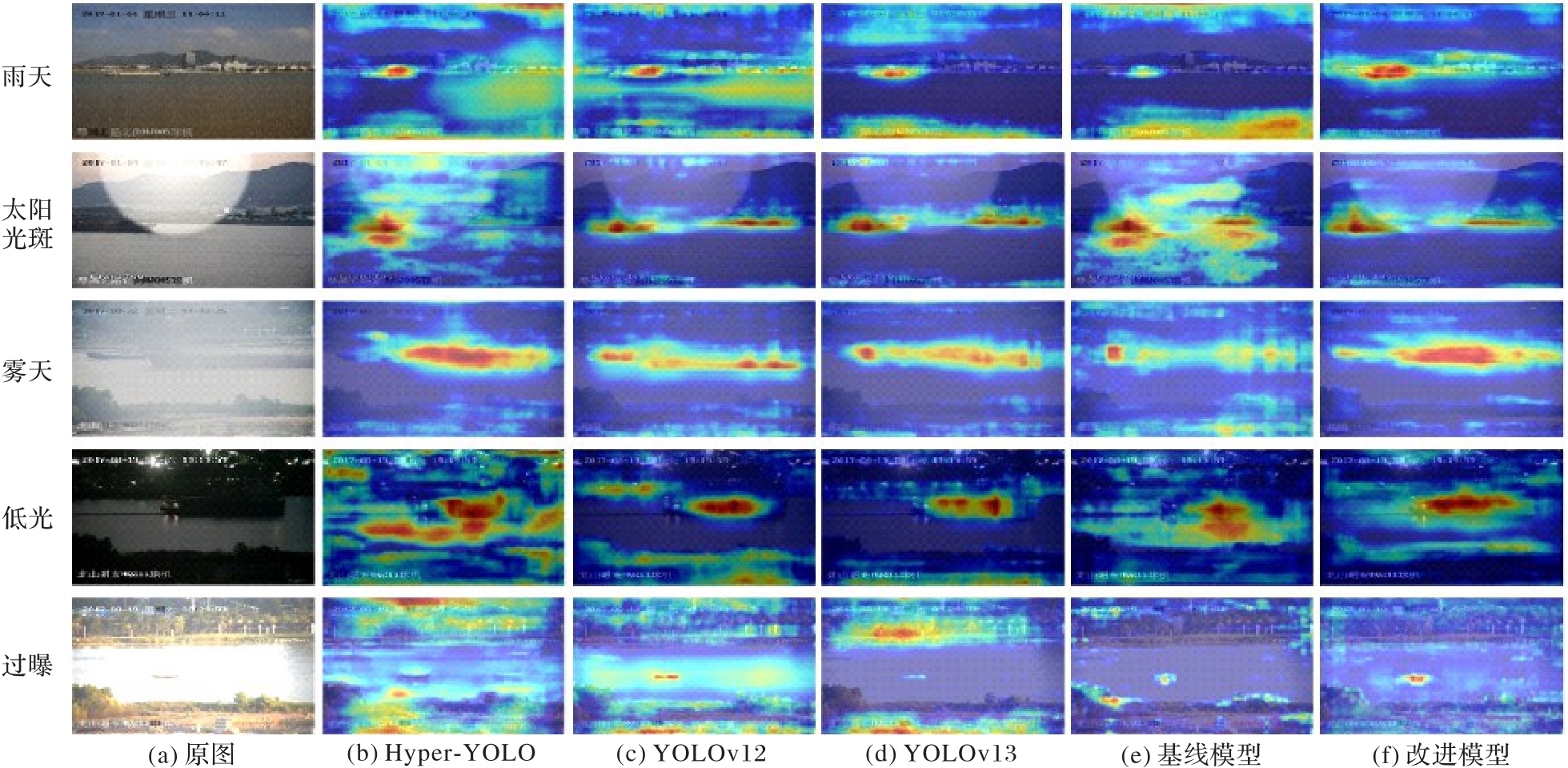
Fig. 9 Comparison of thermodynamic results among different models
| [1] | XU Q, LI Y, ZHANG M, et al. COCO-Net: a dual-supervised network with unified ROI-loss for low-resolution ship detection from optical satellite image sequences[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: No.5629115. |
| [2] | LIU R W, YUAN W, CHEN X, et al. An enhanced CNN-enabled learning method for promoting ship detection in maritime surveillance system[J]. Ocean Engineering, 2021, 235: No.109435. |
| [3] | CHEN X, WEI C, XIN Z, et al. Ship detection under low-visibility weather interference via an ensemble generative adversarial network[J]. Journal of Marine Science and Engineering, 2023, 11(11): No.2065. |
| [4] | LIU T, ZHANG Z, LEI Z, et al. An approach to ship target detection based on combined optimization model of dehazing and detection[J]. Engineering Applications of Artificial Intelligence, 2024, 127(Pt B): No.107332. |
| [5] | GUO J, FENG H, XU H, et al. D3-Net: integrated multi-task convolutional neural network for water surface deblurring, dehazing and object detection[J]. Engineering Applications of Artificial Intelligence, 2023, 117(Pt A): No.105558. |
| [6] | YU M, HAN S, WANG T, et al. An approach to accurate ship image recognition in a complex maritime transportation environment[J]. Journal of Marine Science and Engineering, 2022, 10(12): No.1903. |
| [7] | 龙翔,陈华杰,吴浩宇,等. 基于特征增强的海面强干扰目标检测[J]. 激光与光电子学进展, 2025, 62(2): No.0212008. |
| LONG X, CHEN H J, WU H Y, et al. Strong interference target detection on the sea surface based on feature augmentation[J]. Laser and Optoelectronics Progress, 2025, 62(2): No.0212008. | |
| [8] | 李承烨,张震,梁哲恒,等. 目标检测模型综述[J]. 计算机研究与发展, 2025, 62(12): 2895-2928. |
| LI C Y, ZHANG Z, LIANG Z H, et al. A survey on object detection models[J]. Journal of Computer Research and Development, 2025, 62(12): 2895-2928. | |
| [9] | 武雨田,李擎,孙文蔚,等. 复杂天气下车载激光点云目标检测方法综述[J]. 工程科学学报, 2025, 47(5): 1081-1093. |
| WU Y T, LI Q, SUN W W, et al. Overview of object detection methods based on LiDAR point cloud under adverse weather conditions[J]. Chinese Journal of Engineering, 2025, 47(5): 1081-1093. | |
| [10] | 杜宏,顾宸瑜,张孝峥,等. 基于YOLOv10-vehicle算法的复杂天气情况下车辆目标检测方法[J]. 吉林大学学报(工学版), 2025, 55(10): 3309-3318. |
| DU H, GU C Y, ZHANG X Z, et al. Vehicle target detection method based on the YOLOv10-vehicle algorithm under complex weather conditions[J]. Journal of Jilin University (Engineering and Technology Edition), 2025, 55(10): 3309-3318. | |
| [11] | 王新蕾,王硕,翟嘉政,等. 多任务联合学习下的复杂天气航拍图像目标检测算法[J]. 计算机工程与应用, 2025, 61(2): 97-111. |
| WANG X L, WANG S, ZHAI J Z, et al. Object detection algorithm of aerial image in complex weather based on multi-task joint learning[J]. Computer Engineering and Applications, 2025, 61(2): 97-111. | |
| [12] | 吕中亮,夏可文,卢震宇,等. 密集特征加权融合网络用于复杂天气下的绝缘子表面缺陷检测[J]. 高电压技术, 2025, 51(3): 1114-1125. |
| LYU Z L, XIA K W, LU Z Y, et al. Weather-robust insulator surface defect detection with dense feature weighted fusion network[J]. High Voltage Engineering, 2025, 51(3): 1114-1125. | |
| [13] | FENG C J, ZHONG Y, GAO Y, et al. TOOD: task-aligned one-stage object detection[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3490-3499. |
| [14] | 董甲东,桑飞虎,郭庆虎,等. 基于深度学习的目标检测算法轻量化研究综述[J]. 计算机科学与探索, 2025, 19(8): 2057-2084. |
| DONG J D, SANG F H, GUO Q H, et al. Review of lightweight object detection algorithms based on deep learning[J]. Journal of Frontiers of Computer Science and Technology, 2025, 19(8): 2057-2084. | |
| [15] | 王宁,智敏. 深度学习下的单阶段通用目标检测算法研究综述[J]. 计算机科学与探索, 2025, 19(5): 1115-1140. |
| WANG N, ZHI M. Review of one-stage universal object detection algorithms in deep learning[J]. Journal of Frontiers of Computer Science and Technology, 2025, 19(5): 1115-1140. | |
| [16] | SUNKARA R, LUO T. No more strided convolutions or pooling: a new CNN building block for low-resolution images and small objects[C]// Proceedings of the 2023 Joint European Conference on Machine Learning and Knowledge Discovery in Databases, LNCS 13715. Cham: Springer, 2023: 443-459. |
| [17] | 熊珍凯,程晓强,吴幼冬,等. 基于激光雷达的无人驾驶3D多目标跟踪[J]. 自动化学报, 2023, 49(10): 2073-2083. |
| XIONG Z K, CHENG X Q, WU Y D, et al. LiDAR-based 3D multi-object tracking for unmanned vehicles[J]. Acta Automatica Sinica, 2023, 49(10): 2073-2083. | |
| [18] | 卓力,于婉婷,贾童瑶,等. 基于Transformer的遥感图像变化检测研究进展[J]. 北京工业大学学报, 2025, 51(7): 851-866. |
| ZHUO L, YU W T, JIA T Y, et al. Research progress of Transformer-based remote sensing image change detection[J]. Journal of Beijing University of Technology, 2025, 51(7): 851-866. | |
| [19] | 李沂杨,陆声链,王继杰,等. 基于Transformer的DETR目标检测算法研究综述[J]. 计算机工程, 2026, 52(4): 62-81. |
| LI Y Y, LU S L, WANG J J, et al. Review of DETR object detection algorithm based on Transformer[J]. Computer Engineering, 2026, 52(4): 62-81. | |
| [20] | CHENG S, ZHU Y, WU S. Deep learning based efficient ship detection from drone-captured images for maritime surveillance[J]. Ocean Engineering, 2023, 285(Pt 2): No.115440. |
| [21] | 王微,郁强,王五桂,等. YOLOv7-F:一种轻量级船舶实时检测算法[J].兵器装备工程学报, 2024, 45(11): 11-18. |
| WANG W, YU Q, WANG W G, et al. YOLOv7-F: alight weight real-time ship detection algorithm[J]. Journal of Ordnance Equipment Engineering, 2024, 45(11): 11-18. | |
| [22] | ZHANG Y, CHEN W, LI S, et al. YOLO-Ships: lightweight ship object detection based on feature enhancement[J]. Journal of Visual Communication and Image Representation, 2024, 101: No.104170. |
| [23] | 梁娟,王凯,李小霞. 海面船舶小目标检测的正交子空间投影算法[J]. 机械设计与制造, 2025(10): 83-89, 97. |
| LIANG J, WANG K, LI X X. Small target detection for ships on the sea surface based on orthogonal subspace projection algorithm[J]. Machinery Design and Manufacture, 2025(10): 83-89, 97. | |
| [24] | XU S, ZHENG S, XU W, et al. HCF-Net: hierarchical context fusion network for infrared small object detection [C]// Proceedings of the 2024 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2024: 1-6. |
| [25] | SHAO Y. Local-Global Attention: an adaptive mechanism for multi-scale feature integration[EB/OL]. [2025-08-31].. |
| [26] | WANG C Y, MARK LIAO H Y, WU Y H, et al. CSPNet: a new backbone that can enhance learning capability of CNN[C]// Proceedings of 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2020: 1571-1580. |
| [27] | YU W, SI C, ZHOU P, et al. MetaFormer baselines for vision[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(2): 896-912. |
| [28] | SHI D. TransNeXt: robust foveal visual perception for vision Transformers[C]// Proceedings of the 2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2024: 17773-17783. |
| [29] | SHAO Z, WU W, WANG Z, et al. SeaShips: a large-scale precisely annotated dataset for ship detection[J]. IEEE Transactions on Multimedia, 2018, 20(10): 2593-2604. |
| [1] | Lili HE, Meng CAO, Lei ZHANG, Hongjun PAN, Yi LIU, Chengxin SUN. Sign language generation model based on Kolmogorov-Arnold network and diffusion Transformer [J]. Journal of Computer Applications, 2026, 46(6): 1801-1810. |
| [2] | Yi DU, Mingjin XU, Jiayi KONG, Liyao WANG, Chen ZHAO. Low-rank adaptive parameter-efficient fine-tuning algorithm based on YOLOv11 [J]. Journal of Computer Applications, 2026, 46(6): 1738-1745. |
| [3] | Huijie GUO, Tianfeng DOU, Zhenlin ZHANG, Kaiyuan QI, Dong WU, Zhijian QU, Zhao LI, Chongguang REN. Time-interdependency-aware dynamic Bayesian network for traffic prediction [J]. Journal of Computer Applications, 2026, 46(5): 1507-1517. |
| [4] | Xing SHENG, Sunxian WENG, Kuosong CHEN, Zhongping WANG, Ruifeng REN, Yong LIU. Deep learning-based patent value evaluation for power grid enterprises [J]. Journal of Computer Applications, 2026, 46(5): 1468-1474. |
| [5] | Xinyao LIU, Jun LIANG, Jiahao LONG, Renliang YAN. Fine-grained Chinese herbal medicine image classification based on feature fusion and channel information compensation [J]. Journal of Computer Applications, 2026, 46(5): 1677-1683. |
| [6] | Haoxuan CHEN, Peichang YE, Lei LIU, Chengming LIU, Wenhua HU. Survey of automated code edit suggestion [J]. Journal of Computer Applications, 2026, 46(4): 1227-1237. |
| [7] | Songsen YU, Huang HE, Guopeng XUE, Hengtuo CUI. Quantitation and grading method for ceramic tile chromatic aberration based on improved fractal encoding network [J]. Journal of Computer Applications, 2026, 46(3): 959-968. |
| [8] | Jian ZHANG, Jianbo YU, Jian TANG. Municipal solid waste incineration state recognition method based on multilayer preprocessing [J]. Journal of Computer Applications, 2026, 46(3): 940-949. |
| [9] | Yongwei JIANG, Xiaoqing CHEN, Linjie FU. Elastic medical image registration model with high-frequency preservation based on spectrum decomposition [J]. Journal of Computer Applications, 2026, 46(3): 924-932. |
| [10] | Min CHEN, Xiaolin QIN, Shaohan LI, Hao YANG, Taohong LI. Review of deep learning applications in severe convective weather prediction [J]. Journal of Computer Applications, 2026, 46(3): 980-992. |
| [11] | Haoqian JIANG, Dong ZHANG, Guanyu LI, Heng CHEN. SetaCRS: Conversational recommender system with structure-enhanced hierarchical task-oriented prompting strategy [J]. Journal of Computer Applications, 2026, 46(2): 368-377. |
| [12] | Feng HAN, Yongfeng BU, Haoxiang LIANG, Shuwen HUANG, Zhaoyang ZHANG, Shijie SUN. Vehicle trajectory anomaly detection based on multi-level spatio-temporal interaction dependency [J]. Journal of Computer Applications, 2026, 46(2): 604-612. |
| [13] | Xiaolei CHEN, Zhiwei ZHENG, Xue HUANG, Zhenbin QU. Panoramic video super-resolution network combining spherical alignment and adaptive geometric correction [J]. Journal of Computer Applications, 2026, 46(2): 528-535. |
| [14] | Quanjie LIU, Zhaoyi GU, Chunyuan WANG. Unsafe driving behavior detection under complex lighting conditions [J]. Journal of Computer Applications, 2026, 46(2): 613-619. |
| [15] | Jinjiao LIN, Canshun ZHANG, Shuya CHEN, Tianxin WANG, Jian LIAN, Yonghui XU. Vehicle insurance fraud detection method based on improved graph attention network [J]. Journal of Computer Applications, 2026, 46(2): 437-444. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||