


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (12): 3816-3823.DOI: 10.11772/j.issn.1001-9081.2022111763
Special Issue: 先进计算
• Advanced computing • Previous Articles Next Articles
Longbao WANG1,2, Yinqi LUAN1, Liang XU3, Xin ZENG3, Shuai ZHANG4, Shufang XU1,2( )
)
Received:2022-11-28
Revised:2023-03-26
Accepted:2023-03-30
Online:2023-05-08
Published:2023-12-10
Contact:
Shufang XU
About author:WANG Longbao, born in 1977, Ph. D., senior engineer. His research interests include domain software, intelligent computing.Supported by:
王龙宝1,2, 栾茵琪1, 徐亮3, 曾昕3, 张帅4, 徐淑芳1,2()
通讯作者:
徐淑芳
作者简介:王龙宝(1977—),男,江苏盐城人,高级工程师,博士,CCF会员,主要研究方向:领域软件、智能计算基金资助:CLC Number:
Longbao WANG, Yinqi LUAN, Liang XU, Xin ZENG, Shuai ZHANG, Shufang XU. Route planning method of UAV swarm based on dynamic cluster particle swarm optimization[J]. Journal of Computer Applications, 2023, 43(12): 3816-3823.
王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3816-3823.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022111763
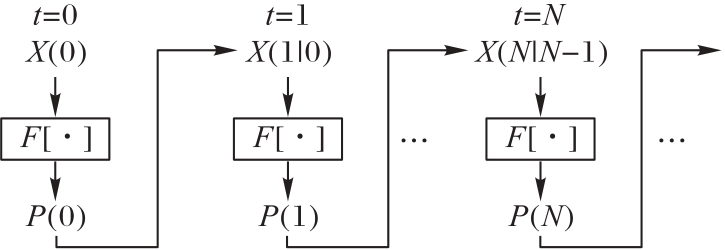
Fig.1 Structure of UAV swarm route planning model
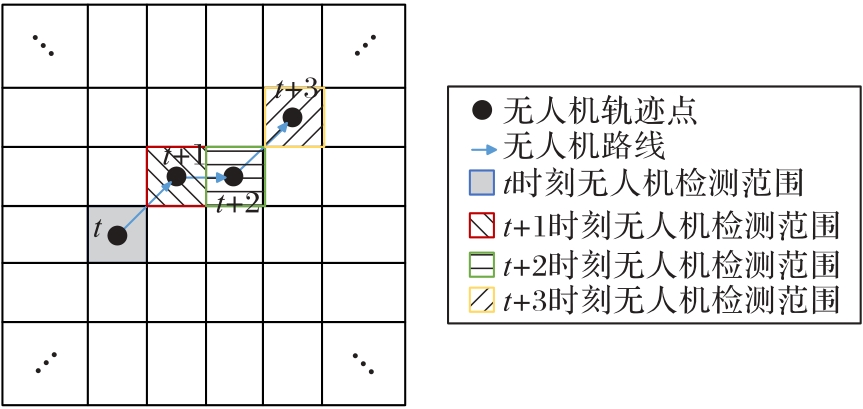
Fig.2 Schematic diagram of receding horizon control strategy
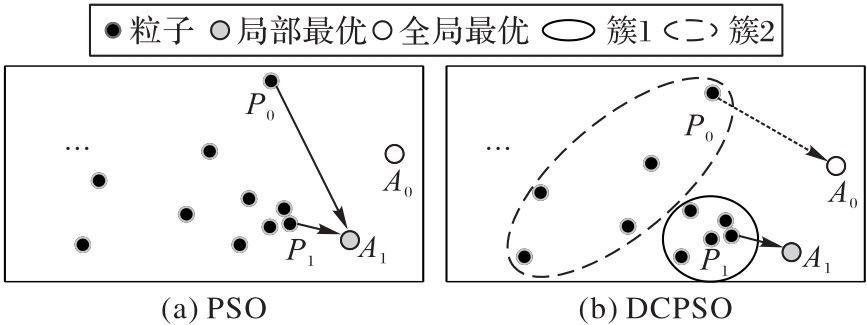
Fig.3 Particle motion comparison of PSO and DCPSO algorithms
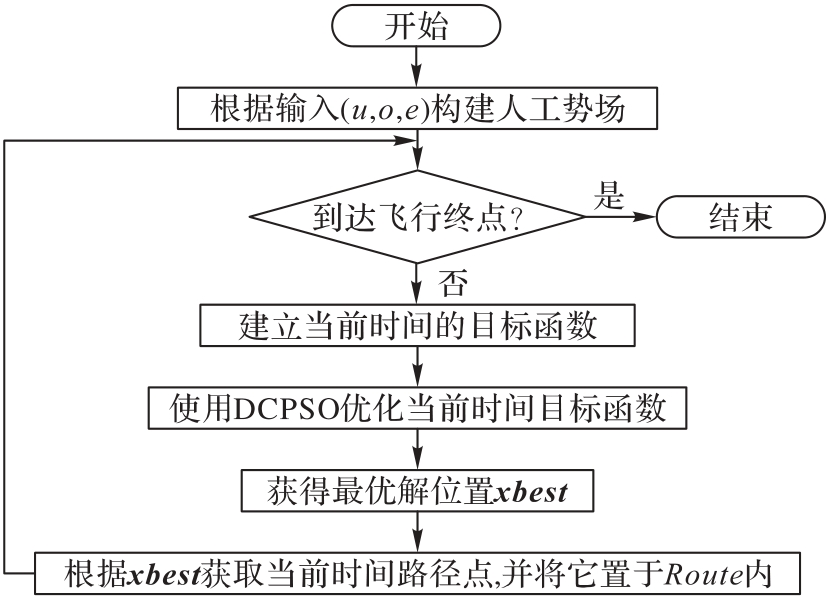
Fig.4 Path planning flow of UAV swarm based on DCPSO
| 算法 | 参数 | 描述 | 值 |
|---|---|---|---|
| PSO | N | 种群数量 | 50 |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 | ||
| PIO | 种群数量 | 50 | |
| 地图和指南针影响因子 | 0.3 | ||
| SSA | 种群数量 | 50 | |
| 发现者 | 20 | ||
| 警觉者 | 10 | ||
| DCPSO | 种群数量 | 50 | |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 |
Tab.1 Parameters for PSO, PIO, SSA and DCPSO algorithms
| 算法 | 参数 | 描述 | 值 |
|---|---|---|---|
| PSO | N | 种群数量 | 50 |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 | ||
| PIO | 种群数量 | 50 | |
| 地图和指南针影响因子 | 0.3 | ||
| SSA | 种群数量 | 50 | |
| 发现者 | 20 | ||
| 警觉者 | 10 | ||
| DCPSO | 种群数量 | 50 | |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Easom | PSO | -4.286 4×10-5 | -6.061 5×10-6 | 1.302 8×10-5 | 1.651 6 |
| PIO | -1.0 | -0.999 9 | 7.266 9×10-6 | 6.731 4 | |
| SSA | -0.999 9 | -0.999 9 | 3.888 6×10-7 | 2.064 8 | |
| CDPIO | -1.0 | -0.999 9 | 2.879 7×10-17 | — | |
| DCPSO | -2.675 2×10-9 | -2.675 2×10-9 | 0 | 13.093 3 | |
| Matyas | PSO | 0.015 0 | 0.229 2 | 0.269 8 | 1.360 0 |
| PIO | 9.498 9×10-63 | 3.321 0×10-30 | 2.266 6×10-29 | 6.790 1 | |
| SSA | 0 | 2.391 7×10-17 | 1.242 0×10-16 | 2.043 6 | |
| CDPIO | 1.046 7×10-101 | 2.986 7×10-95 | 2.376 5×10-188 | — | |
| DCPSO | 0 | 0 | 0 | 12.866 3 |
Tab.2 Test results of unimodal low-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Easom | PSO | -4.286 4×10-5 | -6.061 5×10-6 | 1.302 8×10-5 | 1.651 6 |
| PIO | -1.0 | -0.999 9 | 7.266 9×10-6 | 6.731 4 | |
| SSA | -0.999 9 | -0.999 9 | 3.888 6×10-7 | 2.064 8 | |
| CDPIO | -1.0 | -0.999 9 | 2.879 7×10-17 | — | |
| DCPSO | -2.675 2×10-9 | -2.675 2×10-9 | 0 | 13.093 3 | |
| Matyas | PSO | 0.015 0 | 0.229 2 | 0.269 8 | 1.360 0 |
| PIO | 9.498 9×10-63 | 3.321 0×10-30 | 2.266 6×10-29 | 6.790 1 | |
| SSA | 0 | 2.391 7×10-17 | 1.242 0×10-16 | 2.043 6 | |
| CDPIO | 1.046 7×10-101 | 2.986 7×10-95 | 2.376 5×10-188 | — | |
| DCPSO | 0 | 0 | 0 | 12.866 3 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Sumsquares | PSO | 6.675 7×10-6 | 6.892 1×10-6 | 6.67×10-6 | 5.425 6 |
| PIO | 1.926 6×10-17 | 6.055 5×10-14 | 3.777 3×10-13 | 9.477 7 | |
| SSA | 0 | 4.495 0×10-10 | 1.361 6×10-9 | 3.857 2 | |
| DCPSO | 0 | 0 | 0 | 16.247 0 | |
| Sphere | PSO | 9.144 3×10-4 | 2.483 7×10-2 | 9.12×10-4 | 14.595 4 |
| PIO | 3.147 7×10-24 | 3.644 5×10-21 | 2.820 6×10-20 | 12.703 2 | |
| SSA | 0 | 7.332 8×10-8 | 3.411 3×10-7 | 3.310 4 | |
| DCPSO | 0 | 0 | 0 | 15.566 5 |
Tab.3 Test results of unimodal high-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Sumsquares | PSO | 6.675 7×10-6 | 6.892 1×10-6 | 6.67×10-6 | 5.425 6 |
| PIO | 1.926 6×10-17 | 6.055 5×10-14 | 3.777 3×10-13 | 9.477 7 | |
| SSA | 0 | 4.495 0×10-10 | 1.361 6×10-9 | 3.857 2 | |
| DCPSO | 0 | 0 | 0 | 16.247 0 | |
| Sphere | PSO | 9.144 3×10-4 | 2.483 7×10-2 | 9.12×10-4 | 14.595 4 |
| PIO | 3.147 7×10-24 | 3.644 5×10-21 | 2.820 6×10-20 | 12.703 2 | |
| SSA | 0 | 7.332 8×10-8 | 3.411 3×10-7 | 3.310 4 | |
| DCPSO | 0 | 0 | 0 | 15.566 5 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Bohachevs-ky1 | PSO | 2.124 7×10-11 | 1.297 5×10-8 | 2.293 5×10-8 | 5.343 8 |
| PIO | 0 | 0 | 0 | 9.163 6 | |
| SSA | 0 | 1.811 7×10-17 | 5.499 4×10-17 | 3.582 6 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.871 4 | |
| Eggcrate | PSO | 7.468 4×10-12 | 3.484 2×10-8 | 4.367 4×10-8 | 6.234 7 |
| PIO | 9.961 7×10-61 | 3.902 3×10-13 | 3.875 3×10-12 | 8.345 3 | |
| SSA | 9.375 7×10-9 | 5.087 9×10-7 | 5.915 2×10-7 | 2.092 5 | |
| DCPSO | 0 | 0 | 0 | 12.851 3 | |
| Schaffer | PSO | 3.215 4×10-11 | 5.369 7×10-7 | 6.324 7×10-9 | 7.267 4 |
| PIO | 0 | 1.811 7×10-14 | 5.337 2×10-14 | 9.655 0 | |
| SSA | 0 | 1.690 1×10-13 | 9.099 3×10-13 | 2.114 9 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.904 8 | |
| Bohachevs-ky3 | PSO | 1.514 8×10-11 | 4.398 2×10-9 | 7.269 4×10-9 | 5.639 8 |
| PIO | 0 | 4.440 8×10-18 | 3.222 3×10-17 | 8.161 9 | |
| SSA | 0 | 8.173 7×10-11 | 4.400 4×10-10 | 2.190 1 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 13.133 4 |
Tab.4 Test results of multimodal low-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Bohachevs-ky1 | PSO | 2.124 7×10-11 | 1.297 5×10-8 | 2.293 5×10-8 | 5.343 8 |
| PIO | 0 | 0 | 0 | 9.163 6 | |
| SSA | 0 | 1.811 7×10-17 | 5.499 4×10-17 | 3.582 6 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.871 4 | |
| Eggcrate | PSO | 7.468 4×10-12 | 3.484 2×10-8 | 4.367 4×10-8 | 6.234 7 |
| PIO | 9.961 7×10-61 | 3.902 3×10-13 | 3.875 3×10-12 | 8.345 3 | |
| SSA | 9.375 7×10-9 | 5.087 9×10-7 | 5.915 2×10-7 | 2.092 5 | |
| DCPSO | 0 | 0 | 0 | 12.851 3 | |
| Schaffer | PSO | 3.215 4×10-11 | 5.369 7×10-7 | 6.324 7×10-9 | 7.267 4 |
| PIO | 0 | 1.811 7×10-14 | 5.337 2×10-14 | 9.655 0 | |
| SSA | 0 | 1.690 1×10-13 | 9.099 3×10-13 | 2.114 9 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.904 8 | |
| Bohachevs-ky3 | PSO | 1.514 8×10-11 | 4.398 2×10-9 | 7.269 4×10-9 | 5.639 8 |
| PIO | 0 | 4.440 8×10-18 | 3.222 3×10-17 | 8.161 9 | |
| SSA | 0 | 8.173 7×10-11 | 4.400 4×10-10 | 2.190 1 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 13.133 4 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Rastrigin | PSO | 63.489 1 | 74.234 6 | 9.116 8 | 24.284 6 |
| PIO | 0 | 1.225 6×10-13 | 1.231 9×10-14 | 20.417 8 | |
| SSA | 0 | 6.296 3×10-5 | 0.000 2 | 15.781 6 | |
| CDPIO | -3.005 4 | -3.005 4 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 43.357 3 | |
| Ackley | PSO | 2.389 4 | 16.081 6 | 8.514 4 | 70.364 0 |
| PIO | 1.325 4×10-10 | 6.737 3×10-10 | 1.060 7×10-9 | 46.840 7 | |
| SSA | 4.440 8×10-16 | 1.961 9×10-5 | 0.000 1 | 31.933 4 | |
| DCPSO | 4.440 8×10-16 | 4.440 8×10-16 | 0 | 116.100 0 |
Tab.5 Test results of multimodal high-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Rastrigin | PSO | 63.489 1 | 74.234 6 | 9.116 8 | 24.284 6 |
| PIO | 0 | 1.225 6×10-13 | 1.231 9×10-14 | 20.417 8 | |
| SSA | 0 | 6.296 3×10-5 | 0.000 2 | 15.781 6 | |
| CDPIO | -3.005 4 | -3.005 4 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 43.357 3 | |
| Ackley | PSO | 2.389 4 | 16.081 6 | 8.514 4 | 70.364 0 |
| PIO | 1.325 4×10-10 | 6.737 3×10-10 | 1.060 7×10-9 | 46.840 7 | |
| SSA | 4.440 8×10-16 | 1.961 9×10-5 | 0.000 1 | 31.933 4 | |
| DCPSO | 4.440 8×10-16 | 4.440 8×10-16 | 0 | 116.100 0 |
| 参数 | 描述 | 值 |
|---|---|---|
| Larea /km | 飞行区域长度 | 100 |
| Warea /km | 飞行区域宽度 | 100 |
| Harea /km | 飞行区域高度 | 20 |
| Num×Num | 网格数 | 100×100 |
| UAVS=[uav1,uav2,uav3,uav4] | 无人机集群 初始坐标 | (10,20,15) |
| (20,10,15) | ||
| (10,10,15) | ||
| (10,15,15) | ||
| Obs=[obs1,obs2] | 障碍物中心位置 | (35,40,15) |
| (50,50,15) | ||
| Obj | 目标点坐标 | (85,80,15) |
| φ /(°) | 无人机最大航向角 | 45 |
Tab.6 Experimental parameter setting
| 参数 | 描述 | 值 |
|---|---|---|
| Larea /km | 飞行区域长度 | 100 |
| Warea /km | 飞行区域宽度 | 100 |
| Harea /km | 飞行区域高度 | 20 |
| Num×Num | 网格数 | 100×100 |
| UAVS=[uav1,uav2,uav3,uav4] | 无人机集群 初始坐标 | (10,20,15) |
| (20,10,15) | ||
| (10,10,15) | ||
| (10,15,15) | ||
| Obs=[obs1,obs2] | 障碍物中心位置 | (35,40,15) |
| (50,50,15) | ||
| Obj | 目标点坐标 | (85,80,15) |
| φ /(°) | 无人机最大航向角 | 45 |
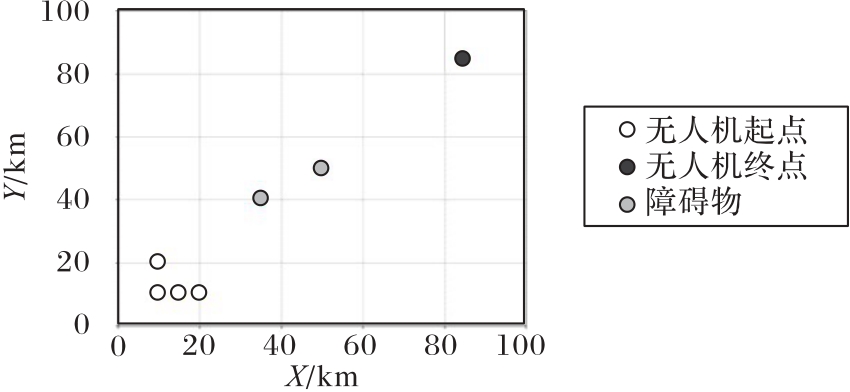
Fig.5 Distribution map of UAV swarm, obstacles and trajectory end point

Fig. 6 Artificial potential field diagram
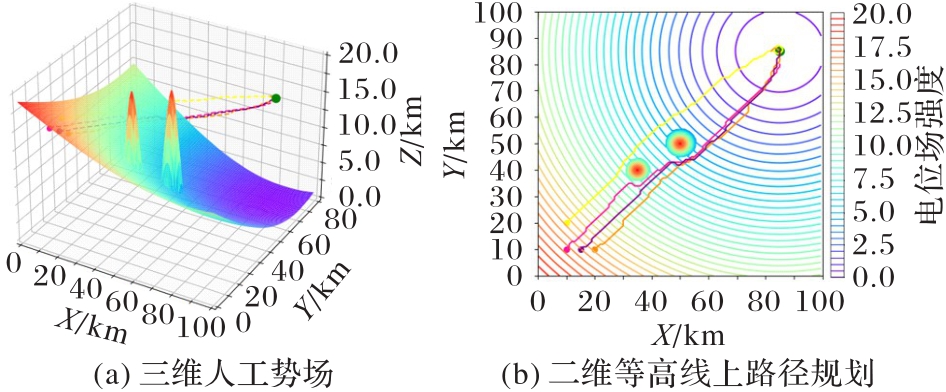
Fig. 7 Route planning of DCPSO algorithm

Fig.8 Convergence curve of DCPSO algorithm

Fig. 9 Route planning of DCPSO algorithm in multi-obstacle environment
| 序号 | 轨迹长度/km | 序号 | 轨迹长度/km | 序号 | 轨迹长度/km |
|---|---|---|---|---|---|
| 1 | 108.784 7 | 11 | 109.477 1 | 21 | 108.752 3 |
| 2 | 108.888 3 | 12 | 108.441 6 | 22 | 108.923 8 |
| 3 | 108.577 6 | 13 | 109.027 4 | 23 | 109.027 4 |
| 4 | 109.613 2 | 14 | 108.338 0 | 24 | 108.545 2 |
| 5 | 109.406 1 | 15 | 109.855 8 | 25 | 108.820 3 |
| 6 | 108.888 3 | 16 | 109.234 5 | 26 | 108.234 5 |
| 7 | 109.406 1 | 17 | 109.027 4 | 27 | 109.130 9 |
| 8 | 109.406 1 | 18 | 109.130 9 | 28 | 108.902 5 |
| 9 | 109.234 5 | 19 | 109.441 6 | 29 | 108.652 5 |
| 10 | 108.820 3 | 20 | 108.545 2 | 30 | 109.006 0 |
Tab. 7 Results of using DCPSO algorithm to conduct 30 independent repeated experiments
| 序号 | 轨迹长度/km | 序号 | 轨迹长度/km | 序号 | 轨迹长度/km |
|---|---|---|---|---|---|
| 1 | 108.784 7 | 11 | 109.477 1 | 21 | 108.752 3 |
| 2 | 108.888 3 | 12 | 108.441 6 | 22 | 108.923 8 |
| 3 | 108.577 6 | 13 | 109.027 4 | 23 | 109.027 4 |
| 4 | 109.613 2 | 14 | 108.338 0 | 24 | 108.545 2 |
| 5 | 109.406 1 | 15 | 109.855 8 | 25 | 108.820 3 |
| 6 | 108.888 3 | 16 | 109.234 5 | 26 | 108.234 5 |
| 7 | 109.406 1 | 17 | 109.027 4 | 27 | 109.130 9 |
| 8 | 109.406 1 | 18 | 109.130 9 | 28 | 108.902 5 |
| 9 | 109.234 5 | 19 | 109.441 6 | 29 | 108.652 5 |
| 10 | 108.820 3 | 20 | 108.545 2 | 30 | 109.006 0 |
| 1 | LYU H, YIN Y. Fast path planning for autonomous ships in restricted waters[J]. Applied Sciences, 2018, 8(12): No.2592. 10.3390/app8122592 |
| 2 | VOLKAN PEHLIVANOGLU Y. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV[J]. Aerospace Science and Technology, 2012, 16(1): 47-55. 10.1016/j.ast.2011.02.006 |
| 3 | XUE J, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science and Control Engineering, 2020, 8(1): 22-34. 10.1080/21642583.2019.1708830 |
| 4 | DUAN H, QIAO P. Pigeon-inspired optimization: a new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24-37. 10.1108/ijicc-02-2014-0005 |
| 5 | BHARNE P K, GULHANE V S, YEWALE S K. Data clustering algorithms based on swarm intelligence[C]// Proceedings of the 3rd International Conference on Electronics Computer Technology. Piscataway: IEEE, 2011: 407-411. 10.1109/icectech.2011.5941931 |
| 6 | KENNEDY J, EBERHART R. Particle swarm optimization[C]// Proceedings of the 1995 International Conference on Neural Networks — Volume 4. Piscataway: IEEE, 1995: 1942-1948. |
| 7 | 鲁亮亮,代冀阳,应进,等. 基于APSODE-MS算法的无人机航迹规划[J]. 控制与决策, 2022, 37(7):1695-1704. |
| LU L L, DAI J Y, YING J, et al. UAV trajectory planning based on APSODE-MS algorithm[J]. Control and Decision, 2022, 37(7): 1695-1704. | |
| 8 | NAYEEM G M, FAN M, AKHTER Y. A time-varying adaptive inertia weight based modified PSO algorithm for UAV path planning[C]// Proceedings of the 2nd International Conference on Robotics, Electrical and Signal Processing Techniques. Piscataway: IEEE, 2021: 573-576. 10.1109/icrest51555.2021.9331101 |
| 9 | LI X, ZHAO Y, ZHANG J, et al. A hybrid PSO algorithm based flight path optimization for multiple agricultural UAVs[C]// Proceedings of the IEEE 28th International Conference on Tools with Artificial Intelligence. Piscataway: IEEE, 2016: 691-697. 10.1109/ictai.2016.0110 |
| 10 | 田兴华,张纪会,李阳. 基于混沌映射的自适应退火型粒子群算法[J]. 复杂系统与复杂性科学, 2020, 17(1):45-54. |
| TIAN X H, ZHANG J H, LI Y. An adaptive annealing particle swarm optimization based on chaotic mapping [J]. Complex Systems and Complexity Science, 2020, 17(1): 45-54. | |
| 11 | ZHANG R, SUN M, PAN C. Micro-nano satellite resource allocation algorithm based on chaos-filled PSO [C]// Proceedings of the 6th International Symposium on Computer and Information Processing Technology. Piscataway: IEEE, 2021: 204-208. 10.1109/iscipt53667.2021.00048 |
| 12 | KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots [J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. 10.1177/027836498600500106 |
| 13 | 段海滨,杨之元. 基于柯西变异鸽群优化的大型民用飞机滚动时域控制[J]. 中国科学:技术科学, 2018, 48(3):277-288. 10.1360/n092017-00211 |
| DUAN H B, ZHANG Z Y. Large civil aircraft receding horizon control based on Cauthy mutation pigeon inspired optimization [J]. SCIENTIA SINICA Technologica, 2018, 48(3): 277-288. 10.1360/n092017-00211 | |
| 14 | LIANG X, WANG D, HUANG M. Improved grey wolf optimizer and their applications[C]// Proceedings of the IEEE 7th International Conference on Computer Science and Network Technology. Piscataway: IEEE, 2019: 107-110. 10.1109/iccsnt47585.2019.8962504 |
| 15 | XU S, XU D, MAO Y, et al. A cooperative dynamic cluster in multitasking mobile networks [J]. Intelligent Automation and Soft Computing, 2017, 23(4): 567-572. 10.1080/10798587.2017.1316079 |
| 16 | LI L, XU S, NIE H, et al. Collaborative target search algorithm for UAV based on chaotic disturbance pigeon-inspired optimization[J]. Applied Sciences, 2021, 11(16): No.7358. 10.3390/app11167358 |
| [1] | Peigen GAO, Bin SUO. Experimental design and staged PSO-Kriging modeling based on weighted hesitant fuzzy set [J]. Journal of Computer Applications, 2024, 44(7): 2144-2150. |
| [2] | Xiaoxin DU, Wei ZHOU, Hao WANG, Tianru HAO, Zhenfei WANG, Mei JIN, Jianfei ZHANG. Survey of subgroup optimization strategies for intelligent algorithms [J]. Journal of Computer Applications, 2024, 44(3): 819-830. |
| [3] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [4] | Jun LIANG, Zehong HONG, Songsen YU. Image segmentation model based on improved particle swarm optimization algorithm and genetic mutation [J]. Journal of Computer Applications, 2023, 43(6): 1743-1749. |
| [5] | Zhihui GAO, Meng HAN, Shujuan LIU, Ang LI, Dongliang MU. Survey of high utility itemset mining methods based on intelligent optimization algorithm [J]. Journal of Computer Applications, 2023, 43(6): 1676-1686. |
| [6] | Zhenhua YU, Zhengqi LIU, Ying LIU, Cheng GUO. Feature selection method based on self-adaptive hybrid particle swarm optimization for software defect prediction [J]. Journal of Computer Applications, 2023, 43(4): 1206-1213. |
| [7] | Feng XIANG, Zhongzhi LI, Xi XIONG, Binyong LI. Inverse distance weight interpolation algorithm based on particle swarm local optimization [J]. Journal of Computer Applications, 2023, 43(2): 385-390. |
| [8] | Xuesen MA, Xuemei XU, Gonghui JIANG, Yan QIAO, Tianbao ZHOU. Hybrid adaptive particle swarm optimization algorithm for workflow scheduling [J]. Journal of Computer Applications, 2023, 43(2): 474-483. |
| [9] | Chunfeng LIU, Zheng LI, Jufeng WANG. Multi-objective optimization of minicells in distributed factories [J]. Journal of Computer Applications, 2023, 43(12): 3824-3832. |
| [10] | Bing GAO, Ya ZHENG, Jing QIN, Qijie ZOU, Zumin WANG. Network intrusion detection algorithm based on sparrow search algorithm and improved particle swarm optimization algorithm [J]. Journal of Computer Applications, 2022, 42(4): 1201-1206. |
| [11] | Fangxin NIE, Yujia WANG, Xin JIA. Teaching and learning information interactive particle swarm optimization algorithm [J]. Journal of Computer Applications, 2022, 42(3): 874-882. |
| [12] | Jing ZHANG, Aihong ZHU. Optimization method of automatic train operation speed curve based on genetic algorithm and particle swarm optimization [J]. Journal of Computer Applications, 2022, 42(2): 599-605. |
| [13] | ZHANG Wenqiang, XING Zheng, YANG Weidong. Hybrid particle swarm optimization with multi-region sampling strategy to solve multi-objective flexible job-shop scheduling problem [J]. Journal of Computer Applications, 2021, 41(8): 2249-2257. |
| [14] | ZHANG Meng, GUO Jianquan. Channel structure choice of closed-loop supply chain under uncertain demand and recovery [J]. Journal of Computer Applications, 2021, 41(7): 2100-2107. |
| [15] | TANG Yanqiang, LI Chenghai, SONG Yafei. Network security situation prediction based on improved particle swarm optimization and extreme learning machine [J]. Journal of Computer Applications, 2021, 41(3): 768-773. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||