


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (4): 1220-1225.DOI: 10.11772/j.issn.1001-9081.2022020261
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Tianzouzi XIAO1( ), Xiaobo ZHOU2, Xin LUO1, Qipeng TANG1
), Xiaobo ZHOU2, Xin LUO1, Qipeng TANG1
Received:2022-03-09
Revised:2022-05-25
Accepted:2022-05-31
Online:2022-08-16
Published:2023-04-10
Contact:
Tianzouzi XIAO
About author:ZHOU Xiaobo, born in 1992, assistant engineer. His research interests include design of civil aircraft process equipment.Supported by:
肖田邹子1(), 周小博2, 罗欣1, 唐其鹏1
通讯作者:
肖田邹子
作者简介:周小博(1992—),男,江苏启东人,助理工程师,主要研究方向:民用航空器工艺装备设计;基金资助:CLC Number:
Tianzouzi XIAO, Xiaobo ZHOU, Xin LUO, Qipeng TANG. Robust RGB-D SLAM system incorporating instance segmentation and clustering in dynamic environment[J]. Journal of Computer Applications, 2023, 43(4): 1220-1225.
肖田邹子, 周小博, 罗欣, 唐其鹏. 动态环境下结合实例分割与聚类的鲁棒RGB-D SLAM系统[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1220-1225.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022020261
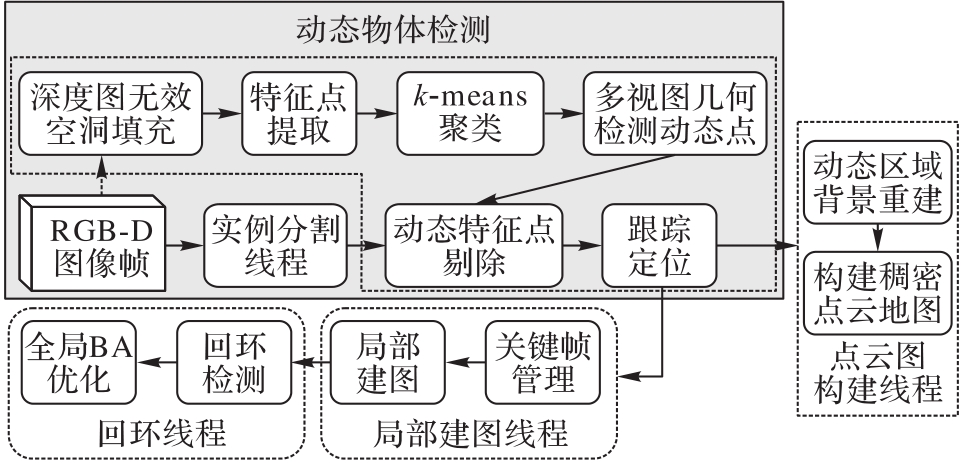
Fig. 1 Framework of ISC-SLAM system

Fig. 2 Possible dynamic region detection based on instance segmentation

Fig. 3 Dynamic point detection based on multi-view geometric relations
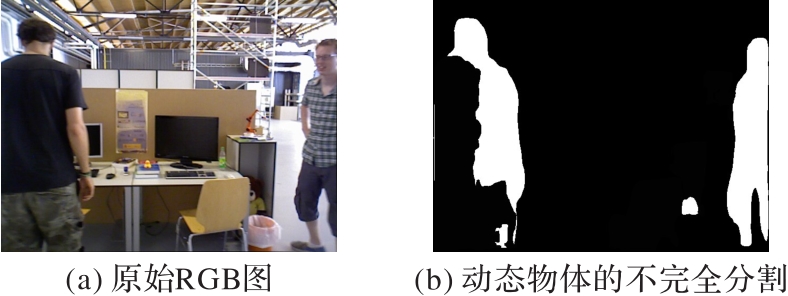
Fig. 4 Under-segmentation problem of dynamic objects
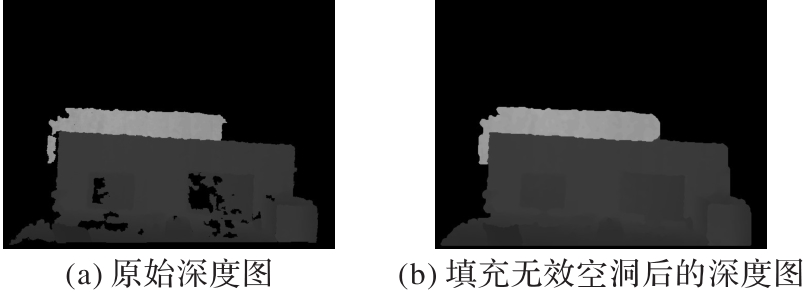
Fig. 5 Filling invalid holes in depth image
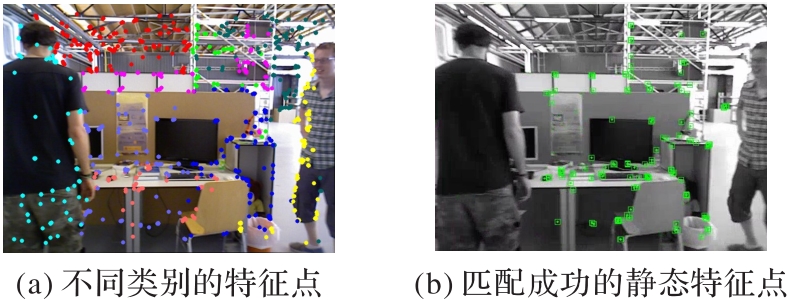
Fig. 6 Effect of dynamic feature point elimination
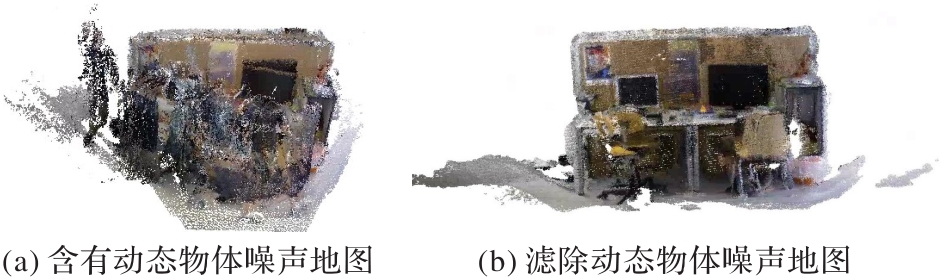
Fig. 7 Dense point cloud maps before and after improvement
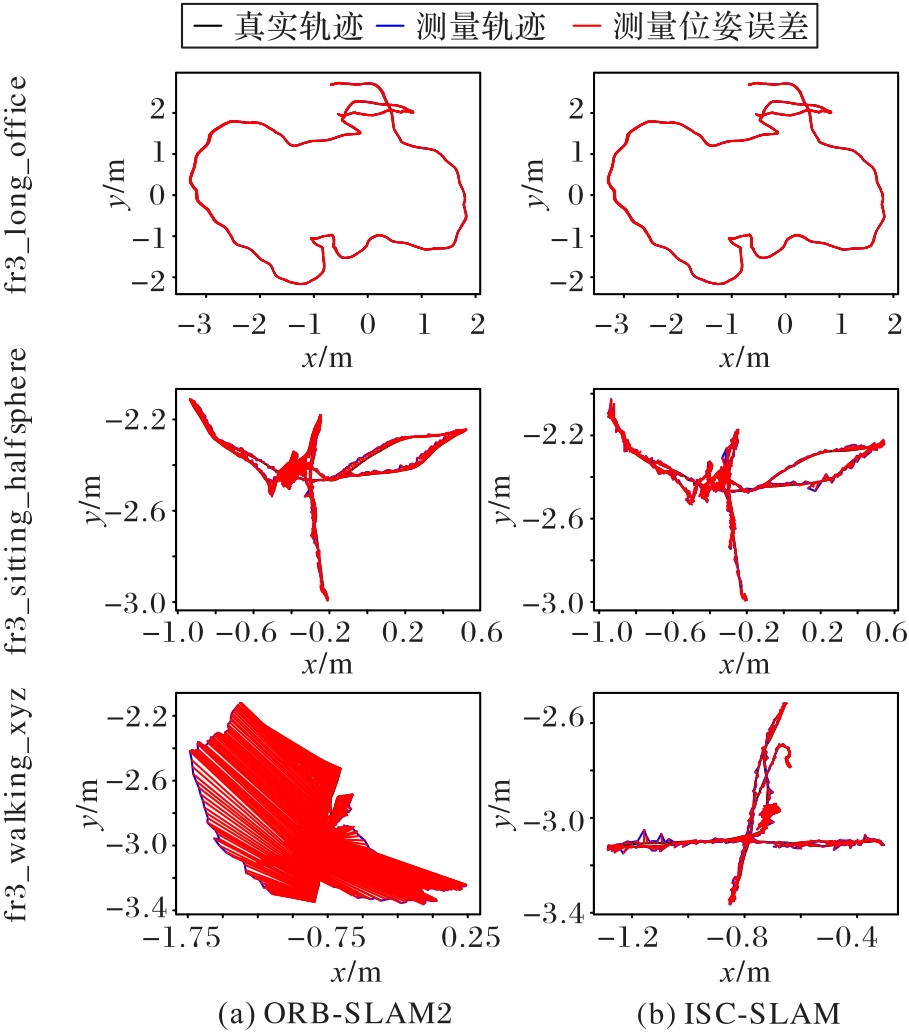
Fig. 8 Trajectory and error comparison of ISC-SLAM and ORB-SLAM2 in different environments
| 环境 | 数据集 | 绝对轨迹误差/m | |||
|---|---|---|---|---|---|
| ORB-SLAM2 | ISC-SLAM | ||||
| RMSE | S.D. | RMSE | S.D. | ||
静态 环境 | fr1_xyz | 0.009 4 | 0.005 2 | 0.009 6 | 0.005 2 |
| fr1_rpy | 0.022 9 | 0.013 7 | 0.022 7 | 0.013 8 | |
| fr2_desk | 0.009 6 | 0.003 1 | 0.008 7 | 0.003 1 | |
| fr3_long_office | 0.010 9 | 0.004 9 | 0.009 0 | 0.003 6 | |
低动态 环境 | fr2_desk_person | 0.006 2 | 0.002 9 | 0.005 8 | 0.002 8 |
| fr3_sitting_xyz | 0.009 7 | 0.004 9 | 0.010 9 | 0.005 2 | |
| fr3_sitting_halfsphere | 0.040 0 | 0.018 0 | 0.020 5 | 0.009 8 | |
| fr3_sitting_static | 0.008 9 | 0.004 3 | 0.006 0 | 0.002 9 | |
高动态 环境 | fr3_walking_rpy | 0.769 0 | 0.371 0 | 0.035 8 | 0.020 7 |
| fr3_walking_xyz | 0.727 0 | 0.376 0 | 0.014 8 | 0.007 7 | |
| fr3_walking_static | 0.303 0 | 0.126 0 | 0.007 3 | 0.003 3 | |
| fr3_walking_halfsphere | 0.507 0 | 0.286 0 | 0.030 3 | 0.014 6 | |
Tab. 1 ATE comparison of ISC-SLAM and ORB-SLAM2
| 环境 | 数据集 | 绝对轨迹误差/m | |||
|---|---|---|---|---|---|
| ORB-SLAM2 | ISC-SLAM | ||||
| RMSE | S.D. | RMSE | S.D. | ||
静态 环境 | fr1_xyz | 0.009 4 | 0.005 2 | 0.009 6 | 0.005 2 |
| fr1_rpy | 0.022 9 | 0.013 7 | 0.022 7 | 0.013 8 | |
| fr2_desk | 0.009 6 | 0.003 1 | 0.008 7 | 0.003 1 | |
| fr3_long_office | 0.010 9 | 0.004 9 | 0.009 0 | 0.003 6 | |
低动态 环境 | fr2_desk_person | 0.006 2 | 0.002 9 | 0.005 8 | 0.002 8 |
| fr3_sitting_xyz | 0.009 7 | 0.004 9 | 0.010 9 | 0.005 2 | |
| fr3_sitting_halfsphere | 0.040 0 | 0.018 0 | 0.020 5 | 0.009 8 | |
| fr3_sitting_static | 0.008 9 | 0.004 3 | 0.006 0 | 0.002 9 | |
高动态 环境 | fr3_walking_rpy | 0.769 0 | 0.371 0 | 0.035 8 | 0.020 7 |
| fr3_walking_xyz | 0.727 0 | 0.376 0 | 0.014 8 | 0.007 7 | |
| fr3_walking_static | 0.303 0 | 0.126 0 | 0.007 3 | 0.003 3 | |
| fr3_walking_halfsphere | 0.507 0 | 0.286 0 | 0.030 3 | 0.014 6 | |
| 环境 | 数据集 | 平移RMSE/m | 旋转RMSE/(°) | ||||
|---|---|---|---|---|---|---|---|
| SPW-IAICP | EP-VO | ISC-SLAM | SPW-IAICP | EP-VO | ISC-SLAM | ||
| 静态环境 | fr2_desk | 0.017 3 | 0.007 2 | 0.007 2 | 0.726 6 | 0.450 6 | 0.447 7 |
| fr3_long_office | 0.016 8 | 0.008 4 | 0.008 1 | 0.801 2 | 0.462 7 | 0.457 8 | |
| 低动态环境 | fr2_desk_person | 0.017 3 | 0.006 8 | 0.006 7 | 0.821 3 | 0.435 9 | 0.434 0 |
| fr3_sitting_xyz | 0.021 9 | 0.010 9 | 0.014 1 | 0.846 6 | 0.471 7 | 0.506 0 | |
| fr3_sitting_halfsphere | 0.038 9 | 0.016 8 | 0.025 5 | 1.883 6 | 0.569 0 | 0.722 4 | |
| 高动态环境 | fr3_walking_rpy | 0.225 2 | 0.056 1 | 0.048 1 | 5.690 2 | 1.021 0 | 0.990 0 |
| fr3_walking_xyz | 0.065 1 | 0.029 2 | 0.019 5 | 1.644 2 | 0.584 7 | 0.608 3 | |
| fr3_walking_static | 0.032 7 | 0.010 1 | 0.009 3 | 0.808 5 | 0.257 1 | 0.249 2 | |
Tab. 2 Translation and rotation RPE comparison of ISC-SLAM, SPW-IAICP and EP-VO
| 环境 | 数据集 | 平移RMSE/m | 旋转RMSE/(°) | ||||
|---|---|---|---|---|---|---|---|
| SPW-IAICP | EP-VO | ISC-SLAM | SPW-IAICP | EP-VO | ISC-SLAM | ||
| 静态环境 | fr2_desk | 0.017 3 | 0.007 2 | 0.007 2 | 0.726 6 | 0.450 6 | 0.447 7 |
| fr3_long_office | 0.016 8 | 0.008 4 | 0.008 1 | 0.801 2 | 0.462 7 | 0.457 8 | |
| 低动态环境 | fr2_desk_person | 0.017 3 | 0.006 8 | 0.006 7 | 0.821 3 | 0.435 9 | 0.434 0 |
| fr3_sitting_xyz | 0.021 9 | 0.010 9 | 0.014 1 | 0.846 6 | 0.471 7 | 0.506 0 | |
| fr3_sitting_halfsphere | 0.038 9 | 0.016 8 | 0.025 5 | 1.883 6 | 0.569 0 | 0.722 4 | |
| 高动态环境 | fr3_walking_rpy | 0.225 2 | 0.056 1 | 0.048 1 | 5.690 2 | 1.021 0 | 0.990 0 |
| fr3_walking_xyz | 0.065 1 | 0.029 2 | 0.019 5 | 1.644 2 | 0.584 7 | 0.608 3 | |
| fr3_walking_static | 0.032 7 | 0.010 1 | 0.009 3 | 0.808 5 | 0.257 1 | 0.249 2 | |
| 环境 | 数据集 | SPW-IAICP | EP-VO | SD-SLAM | DynaSLAM | ISC-SLAM | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | S.D. | RMSE | S.D. | RMSE | S.D. | RMSE | S.D. | RMSE | S.D. | ||
低动态 环境 | fr2_desk_person | 0.048 4 | 0.023 7 | 0.006 0 | 0.002 7 | 0.007 0 | ― | 0.072 0 | 0.017 2 | 0.005 8 | 0.002 8 |
| fr3_sitting_xyz | 0.039 7 | 0.020 6 | 0.008 7 | 0.004 1 | 0.013 0 | ― | 0.015 0 | 0.006 5 | 0.010 9 | 0.005 2 | |
| fr3_sitting_halfsphere | 0.043 2 | 0.024 6 | 0.014 8 | 0.007 4 | 0.019 0 | ― | 0.017 0 | 0.011 3 | 0.020 5 | 0.009 8 | |
高动态 环境 | fr3_walking_rpy | 0.179 1 | 0.116 1 | 0.038 8 | 0.024 1 | 0.033 0 | ― | 0.035 0 | 0.043 7 | 0.035 8 | 0.020 7 |
| fr3_walking_xyz | 0.060 1 | 0.033 0 | 0.022 2 | 0.012 2 | 0.014 0 | ― | 0.015 0 | 0.008 6 | 0.014 8 | 0.007 7 | |
| fr3_walking_static | 0.026 1 | 0.012 2 | 0.007 8 | 0.004 0 | 0.010 0 | ― | 0.006 0 | 0.003 4 | 0.007 3 | 0.003 3 | |
| fr3_walking_halfsphere | 0.048 9 | 0.726 6 | 0.032 8 | 0.018 4 | 0.028 0 | ― | 0.025 0 | 0.016 1 | 0.030 3 | 0.014 6 | |
Tab. 3 ATE comparison of ISC-SLAM,SPW-IAICP,EP-VO,SD-SLAM and DynaSLAM
| 环境 | 数据集 | SPW-IAICP | EP-VO | SD-SLAM | DynaSLAM | ISC-SLAM | |||||
|---|---|---|---|---|---|---|---|---|---|---|---|
| RMSE | S.D. | RMSE | S.D. | RMSE | S.D. | RMSE | S.D. | RMSE | S.D. | ||
低动态 环境 | fr2_desk_person | 0.048 4 | 0.023 7 | 0.006 0 | 0.002 7 | 0.007 0 | ― | 0.072 0 | 0.017 2 | 0.005 8 | 0.002 8 |
| fr3_sitting_xyz | 0.039 7 | 0.020 6 | 0.008 7 | 0.004 1 | 0.013 0 | ― | 0.015 0 | 0.006 5 | 0.010 9 | 0.005 2 | |
| fr3_sitting_halfsphere | 0.043 2 | 0.024 6 | 0.014 8 | 0.007 4 | 0.019 0 | ― | 0.017 0 | 0.011 3 | 0.020 5 | 0.009 8 | |
高动态 环境 | fr3_walking_rpy | 0.179 1 | 0.116 1 | 0.038 8 | 0.024 1 | 0.033 0 | ― | 0.035 0 | 0.043 7 | 0.035 8 | 0.020 7 |
| fr3_walking_xyz | 0.060 1 | 0.033 0 | 0.022 2 | 0.012 2 | 0.014 0 | ― | 0.015 0 | 0.008 6 | 0.014 8 | 0.007 7 | |
| fr3_walking_static | 0.026 1 | 0.012 2 | 0.007 8 | 0.004 0 | 0.010 0 | ― | 0.006 0 | 0.003 4 | 0.007 3 | 0.003 3 | |
| fr3_walking_halfsphere | 0.048 9 | 0.726 6 | 0.032 8 | 0.018 4 | 0.028 0 | ― | 0.025 0 | 0.016 1 | 0.030 3 | 0.014 6 | |
| 系统 | fr3_walking_xyz | fr3_walking_halfsphere | fr3_walking_static | |||
|---|---|---|---|---|---|---|
| RMSE | Mean | RMSE | Mean | RMSE | Mean | |
| YOLOv4+ORB-SLAM2 | 0.017 4 | 0.014 7 | 0.032 8 | 0.028 0 | 0.008 0 | 0.006 9 |
| GMS+ORB-SLAM2 | 0.016 5 | 0.014 3 | 0.029 8 | 0.025 0 | 0.007 9 | 0.007 0 |
| ISC-SLAM | 0.014 8 | 0.012 7 | 0.030 3 | 0.028 3 | 0.007 3 | 0.007 0 |
Tab. 4 ATE comparison of ISC-SLAM, YOLOv4+ORB-SLAM2 and GMS+ORB-SLAM2
| 系统 | fr3_walking_xyz | fr3_walking_halfsphere | fr3_walking_static | |||
|---|---|---|---|---|---|---|
| RMSE | Mean | RMSE | Mean | RMSE | Mean | |
| YOLOv4+ORB-SLAM2 | 0.017 4 | 0.014 7 | 0.032 8 | 0.028 0 | 0.008 0 | 0.006 9 |
| GMS+ORB-SLAM2 | 0.016 5 | 0.014 3 | 0.029 8 | 0.025 0 | 0.007 9 | 0.007 0 |
| ISC-SLAM | 0.014 8 | 0.012 7 | 0.030 3 | 0.028 3 | 0.007 3 | 0.007 0 |
| 系统 | fr3_walking_xyz | fr3_walking_halfsphere | fr3_walking_static | |||
|---|---|---|---|---|---|---|
| RMSE | Mean | RMSE | Mean | RMSE | Mean | |
| YOLOv4+ORB-SLAM2 | 0.013 1 | 0.010 4 | 0.015 2 | 0.012 1 | 0.006 1 | 0.005 2 |
| GMS+ORB-SLAM2 | 0.012 7 | 0.010 3 | 0.015 3 | 0.012 1 | 0.006 1 | 0.005 2 |
| ISC-SLAM | 0.019 5 | 0.010 2 | 0.0146 | 0.0120 | 0.009 3 | 0.006 8 |
Tab. 5 Translation RPE comparison of ISC-SLAM, YOLOv4+ORB-SLAM2 and GMS+ORB-SLAM2
| 系统 | fr3_walking_xyz | fr3_walking_halfsphere | fr3_walking_static | |||
|---|---|---|---|---|---|---|
| RMSE | Mean | RMSE | Mean | RMSE | Mean | |
| YOLOv4+ORB-SLAM2 | 0.013 1 | 0.010 4 | 0.015 2 | 0.012 1 | 0.006 1 | 0.005 2 |
| GMS+ORB-SLAM2 | 0.012 7 | 0.010 3 | 0.015 3 | 0.012 1 | 0.006 1 | 0.005 2 |
| ISC-SLAM | 0.019 5 | 0.010 2 | 0.0146 | 0.0120 | 0.009 3 | 0.006 8 |
| 系统 | fr3_walking_xyz | fr3_walking_halfsphere | fr3_walking_static | |||
|---|---|---|---|---|---|---|
| RMSE | Mean | RMSE | Mean | RMSE | Mean | |
| YOLOv4+ORB-SLAM2 | 0.903 7 | 0.867 8 | 0.984 4 | 0.935 2 | 5.144 2 | 5.143 3 |
| GMS+ORB-SLAM2 | 0.740 4 | 0.691 7 | 0.895 7 | 0.841 6 | 4.955 9 | 4.954 1 |
| ISC-SLAM | 0.608 3 | 0.279 6 | 0.430 0 | 0.359 8 | 0.249 2 | 0.173 0 |
Tab. 6 Rotation RPE comparison of ISC-SLAM, YOLOv4+ORB-SLAM2 and GMS+ORB-SLAM2
| 系统 | fr3_walking_xyz | fr3_walking_halfsphere | fr3_walking_static | |||
|---|---|---|---|---|---|---|
| RMSE | Mean | RMSE | Mean | RMSE | Mean | |
| YOLOv4+ORB-SLAM2 | 0.903 7 | 0.867 8 | 0.984 4 | 0.935 2 | 5.144 2 | 5.143 3 |
| GMS+ORB-SLAM2 | 0.740 4 | 0.691 7 | 0.895 7 | 0.841 6 | 4.955 9 | 4.954 1 |
| ISC-SLAM | 0.608 3 | 0.279 6 | 0.430 0 | 0.359 8 | 0.249 2 | 0.173 0 |
| 系统 | 平均定位跟踪单帧耗时 |
|---|---|
| ORB-SLAM2 | 40.278 |
| DynaSLAM | 1 640.290 |
| SD-SLAM | 1 100.000 |
| GMS+ORB-SLAM2 | 163.972 |
| ISC-SLAM | 87.931 |
Tab. 7 Average positioning and tracking time of different system
| 系统 | 平均定位跟踪单帧耗时 |
|---|---|
| ORB-SLAM2 | 40.278 |
| DynaSLAM | 1 640.290 |
| SD-SLAM | 1 100.000 |
| GMS+ORB-SLAM2 | 163.972 |
| ISC-SLAM | 87.931 |
| 系统 | 定位丢失次数 |
|---|---|
| ORB-SLAM2 | 166 |
| DynaSLAM | 117 |
| ISC-SLAM | 0 |
Tab. 8 Positioning loss times of different system
| 系统 | 定位丢失次数 |
|---|---|
| ORB-SLAM2 | 166 |
| DynaSLAM | 117 |
| ISC-SLAM | 0 |
| 1 | SCHLEICHER D, BERGASA L M, OCAÑA M, et al. Real-time hierarchical GPS aided visual SLAM on urban environments[C]// Proceedings of the 2009 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2009: 4381-4386. 10.1109/robot.2009.5152370 |
| 2 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. 10.1109/tro.2017.2705103 |
| 3 | NEWCOMBE R A, LOVEGROVE S J, DAVISON A J. DTAM: dense tracking and mapping in real-time[C]// Proceedings of the 2011 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2011: 2320-2327. 10.1109/iccv.2011.6126513 |
| 4 | YANG Z F, SHEN S J. Monocular visual-inertial state estimation with online initialization and camera-IMU extrinsic calibration[J]. IEEE Transactions on Automation Science and Engineering, 2017, 14(1): 39-51. 10.1109/tase.2016.2550621 |
| 5 | FORSTER C, CARLONE L, DELLAERT F, et al. On-manifold preintegration for real-time visual-inertial odometry[J]. IEEE Transactions on Robotics, 2017, 33(1): 1-21. 10.1109/tro.2016.2597321 |
| 6 | ZOU D P, WU Y X, PEI L, et al. StructVIO: visual-inertial odometry with structural regularity of man-made environments[J]. IEEE Transactions on Robotics, 2019, 35(4): 999-1013. 10.1109/tro.2019.2915140 |
| 7 | QIN T, LI P L, SHEN S J. VINS-Mono: a robust and versatile monocular visual-inertial state estimator[J]. IEEE Transactions on Robotics, 2018, 34(4): 1004-1020. 10.1109/tro.2018.2853729 |
| 8 | MUR-ARTAL R, TARDÓS J D. Visual-inertial monocular SLAM with map reuse[J]. IEEE Robotics and Automation Letters, 2017, 2(2): 796-803. 10.1109/lra.2017.2653359 |
| 9 | YAO E L, ZHANG H X, XU H, et al. Robust RGB-D visual odometry based on edges and points[J]. Robotics and Autonomous Systems, 2018, 107: 209-220. 10.1016/j.robot.2018.06.009 |
| 10 | LI S L, LEE D. RGB-D SLAM in dynamic environments using static point weighting[J]. IEEE Robotics and Automation Letters, 2017, 2(4): 2263-2270. 10.1109/lra.2017.2724759 |
| 11 | BESCOS B, FÁCIL J M, CIVERA J, et al. DynaSLAM: tracking, mapping, and inpainting in dynamic scenes[J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. 10.1109/lra.2018.2860039 |
| 12 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017:2980-2988. 10.1109/iccv.2017.322 |
| 13 | ZHAO L L, LIU Z L, CHEN J W, et al. A compatible framework for RGB-D SLAM in dynamic scenes[J]. IEEE Access, 2019, 7: 75604-75614. 10.1109/access.2019.2922733 |
| 14 | XIE W F, LIU P X, ZHENG M H. Moving object segmentation and detection for robust RGBD-SLAM in dynamic environments[J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: No.5001008. 10.1109/tim.2020.3026803 |
| 15 | 徐少杰,曹雏清,王永娟. 视觉SLAM在室内动态场景中的应用研究[J]. 计算机工程与应用, 2021, 57(8):175-179. 10.3778/j.issn.1002-8331.2009-0021 |
| XU S J, CAO C Q, WANG Y J. Application research of visual SLAM in indoor dynamic scenes[J]. Computer Engineering and Applications, 2021, 57(8): 175-179. 10.3778/j.issn.1002-8331.2009-0021 | |
| 16 | 席志红,温家旭. 基于目标检测的室内动态场景定位与建图[J]. 计算机应用, 2022, 42(9):2853-2857. 10.11772/j.issn.1001-9081.2021061077 |
| XI Z H, WEN J X. Indoor dynamic scene localization and mapping based on target detection[J]. Journal of Computer Applications, 2022, 42(9):2853-2857. 10.11772/j.issn.1001-9081.2021061077 | |
| 17 | LEE Y, PARK J. CenterMask: real-time anchor-free instance segmentation[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 13903-13912. 10.1109/cvpr42600.2020.01392 |
| 18 | 高翔,张涛,刘毅,等. 视觉SLAM十四讲:从理论到实践[M]. 2版.北京:电子工业出版社, 2019:152-153. |
| GAO X, ZHANG T, LIU Y, et al. 14 Lectures on Visual SLAM: From Theory to Practice[M]. 2nd ed. Beijing: Publishing House of Electronics Industry, 2019: 152-153. | |
| 19 | LIN T Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context[J]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8693. Cham: Springer, 2014: 740-755. |
| 20 | STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]// Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 573-580. 10.1109/iros.2012.6385773 |
| 21 | SUN Y X, LIU M, MENG M Q H. Improving RGB-D SLAM in dynamic environments: a motion removal approach[J]. Robotics and Autonomous Systems, 2017, 89: 110-122. 10.1016/j.robot.2016.11.012 |
| 22 | GRUPP M. Evo: Python package for the evaluation of odometry and SLAM[EB/OL]. [2022-01-20].. |
| [1] | Shunyong LI, Shiyi LI, Rui XU, Xingwang ZHAO. Incomplete multi-view clustering algorithm based on self-attention fusion [J]. Journal of Computer Applications, 2024, 44(9): 2696-2703. |
| [2] | Xun SUN, Ruifeng FENG, Yanru CHEN. Monocular 3D object detection method integrating depth and instance segmentation [J]. Journal of Computer Applications, 2024, 44(7): 2208-2215. |
| [3] | Qing WANG, Jieyu ZHAO, Xulun YE, Nongxiao WANG. Enhanced deep subspace clustering method with unified framework [J]. Journal of Computer Applications, 2024, 44(7): 1995-2003. |
| [4] | Yao DONG, Yixue FU, Yongfeng DONG, Jin SHI, Chen CHEN. Survey of incomplete multi-view clustering [J]. Journal of Computer Applications, 2024, 44(6): 1673-1682. |
| [5] | Xiaoxia JIANG, Ruizhang HUANG, Ruina BAI, Lina REN, Yanping CHEN. Deep event clustering method based on event representation and contrastive learning [J]. Journal of Computer Applications, 2024, 44(6): 1734-1742. |
| [6] | Tianyu HUANG, Yuanxing LI, Hao CHEN, Zijia GUO, Mingjun WEI. User cluster partitioning method based on weighted fuzzy clustering in ground-air collaboration scenarios [J]. Journal of Computer Applications, 2024, 44(5): 1555-1561. |
| [7] | Lin GAO, Yu ZHOU, Tak Wu KWONG. Evolutionary bi-level adaptive local feature selection [J]. Journal of Computer Applications, 2024, 44(5): 1408-1414. |
| [8] | Tongtong XU, Bin XIE, Chunhao ZHANG, Ximei ZHANG. Multi-order nearest neighbor graph clustering algorithm by fusing transition probability matrix [J]. Journal of Computer Applications, 2024, 44(5): 1527-1538. |
| [9] | Yu DING, Hanlin ZHANG, Rong LUO, Hua MENG. Fuzzy clustering algorithm based on belief subcluster cutting [J]. Journal of Computer Applications, 2024, 44(4): 1128-1138. |
| [10] | Long CHEN, Xuanlin YU, Wen CHEN, Yi YAO, Wenjing ZHU, Ying JIA, Denghong LI, Zhi REN. Efficient clustered routing protocol for intelligent road cone ad-hoc networks based on non-random clustering [J]. Journal of Computer Applications, 2024, 44(3): 869-875. |
| [11] | Lin SUN, Menghan LIU. K-means clustering based on adaptive cuckoo optimization feature selection [J]. Journal of Computer Applications, 2024, 44(3): 831-841. |
| [12] | Cunyi LIAO, Yi ZHENG, Weijin LIU, Huan YU, Shouyin LIU. Decoupling-fusing algorithm for multiple tasks with autonomous driving environment perception [J]. Journal of Computer Applications, 2024, 44(2): 424-431. |
| [13] | Zhuo ZHANG, Huazhu CHEN. Deep subspace clustering based on multiscale self-representation learning with consistency and diversity [J]. Journal of Computer Applications, 2024, 44(2): 353-359. |
| [14] | Fuqin DENG, Huifeng GUAN, Chaoen TAN, Lanhui FU, Hongmin WANG, Tinlun LAM, Jianmin ZHANG. Multi-robot reinforcement learning path planning method based on request-response communication mechanism and local attention mechanism [J]. Journal of Computer Applications, 2024, 44(2): 432-438. |
| [15] | Chenghao YANG, Jie HU, Hongjun WANG, Bo PENG. Incomplete multi-view clustering algorithm based on attention mechanism [J]. Journal of Computer Applications, 2024, 44(12): 3784-3789. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||