


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (7): 2155-2165.DOI: 10.11772/j.issn.1001-9081.2022060908
Special Issue: 人工智能
• Artificial intelligence • Previous Articles Next Articles
Jing ZHOU1( ), Yiyu HU1, Chengyu HU2, Tianjiang WANG3
), Yiyu HU1, Chengyu HU2, Tianjiang WANG3
Received:2022-06-23
Revised:2022-09-16
Accepted:2022-09-22
Online:2022-10-18
Published:2023-07-10
Contact:
Jing ZHOU
About author:ZHOU Jing, born in 1981, Ph. D., professor. Her research interests include three-dimensional object detection, deep learning.Supported by:
周静1(), 胡怡宇1, 胡成玉2, 王天江3
通讯作者:
周静
作者简介:周静(1981—),女,湖北襄阳人,教授,博士,主要研究方向:三维目标检测、深度学习;基金资助:CLC Number:
Jing ZHOU, Yiyu HU, Chengyu HU, Tianjiang WANG. Weakly perceived object detection method based on point cloud completion and multi-resolution Transformer[J]. Journal of Computer Applications, 2023, 43(7): 2155-2165.
周静, 胡怡宇, 胡成玉, 王天江. 基于点云补全和多分辨Transformer的弱感知目标检测方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2155-2165.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022060908

Fig. 1 Rendering of missing shapes of weakly perceived objects
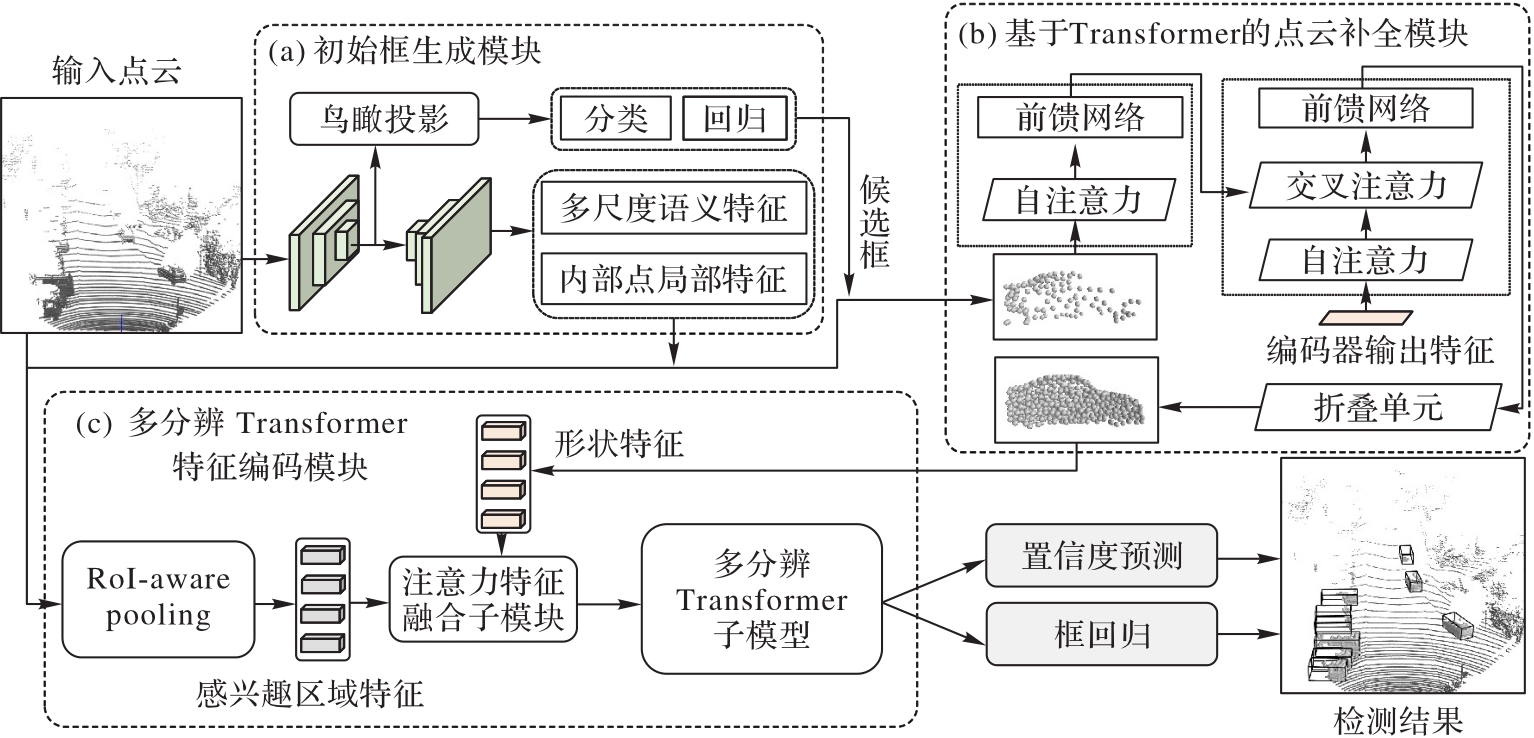
Fig. 2 Overall structure of WP-CMT
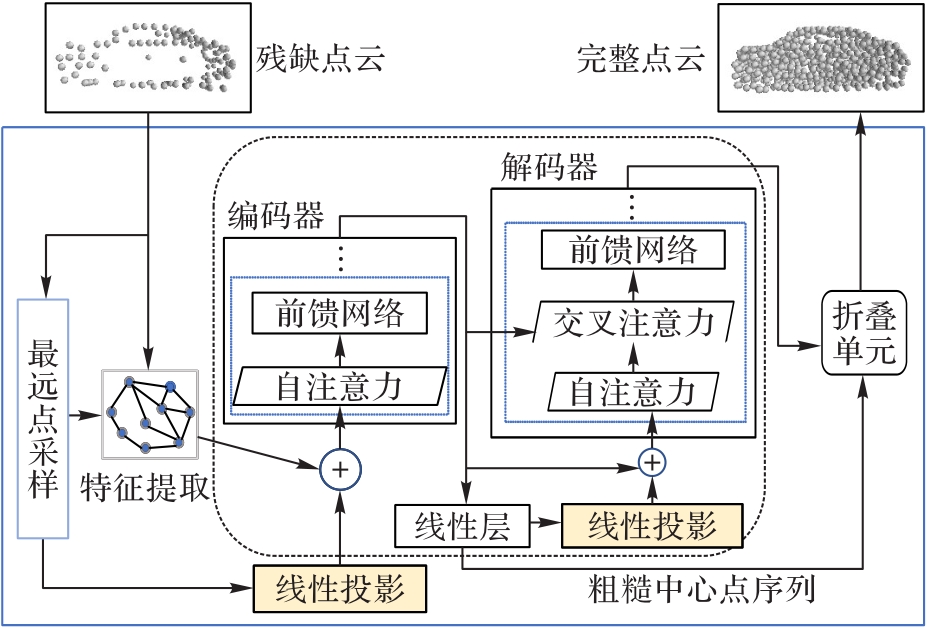
Fig. 3 Flowchart of Transformer-based point cloud completion module
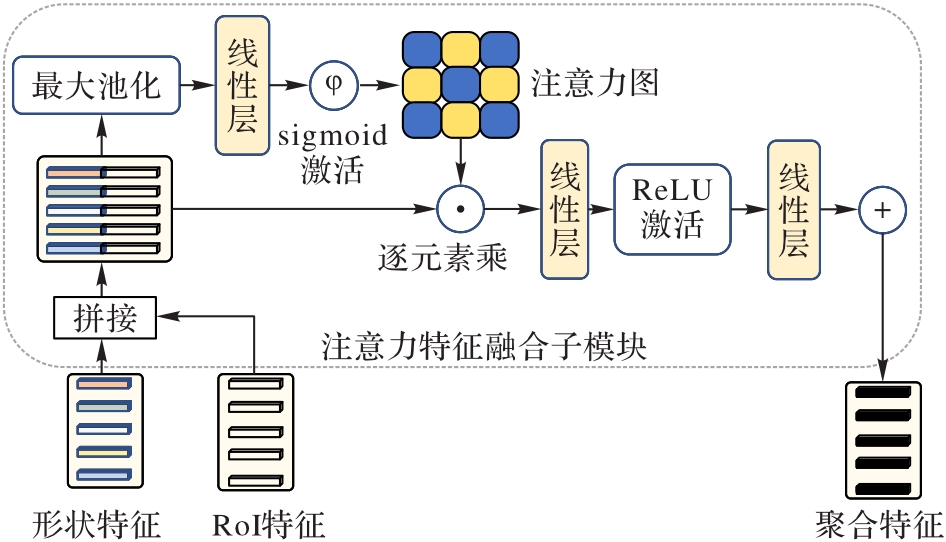
Fig. 4 Attention-based feature fusion sub-module
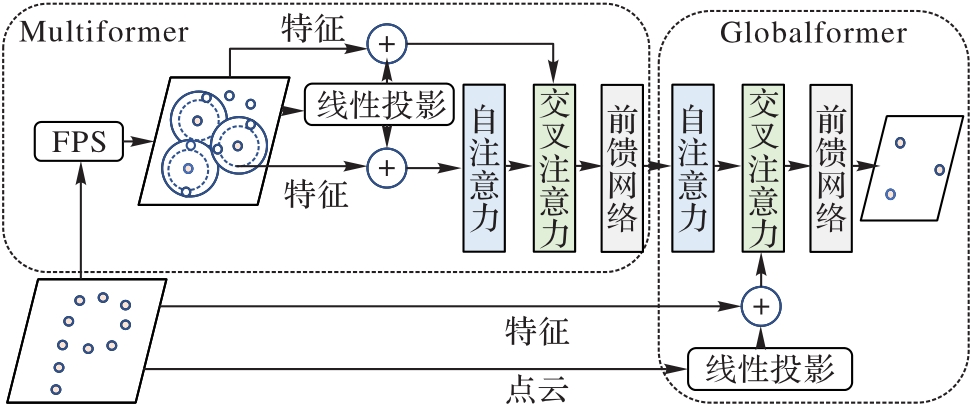
Fig. 5 Schematic diagram of multi-resolution attention layer
| 检测方法 | mAP/% | AP 3D/% (IoU=0.7) | 时间/ms |
|---|---|---|---|
| 困难 | |||
| AVOD[ | 75.83 | 68.65 | 100 |
| F-PointNet[ | 72.78 | 63.65 | 170 |
| PI-RCNN[ | 80.56 | 76.17 | 107 |
| SECOND[ | 81.48 | 77.22 | 50 |
| PointPillars[ | 79.76 | 74.77 | 16 |
| FastPoint RCNN[ | 81.87 | 77.48 | 65 |
| TANet[ | 80.56 | 75.62 | 38 |
| Associate-3Ddet[ | 82.07 | 77.76 | 60 |
| HVNet[ | 78.86 | 71.79 | 32 |
| PointRCNN[ | 81.63 | 77.38 | 100 |
| SECOND-Gaussian+[ | 81.69 | 77.44 | 68 |
| SA-SSD[ | 82.95 | 78.78 | 40 |
| Part-A2[ | 82.49 | 78.54 | 83 |
| WP-CMT(本文方法) | 84.24 | 79.22 | 87 |
Tab. 1 Comparison of different methods on KITTI validation set for car class
| 检测方法 | mAP/% | AP 3D/% (IoU=0.7) | 时间/ms |
|---|---|---|---|
| 困难 | |||
| AVOD[ | 75.83 | 68.65 | 100 |
| F-PointNet[ | 72.78 | 63.65 | 170 |
| PI-RCNN[ | 80.56 | 76.17 | 107 |
| SECOND[ | 81.48 | 77.22 | 50 |
| PointPillars[ | 79.76 | 74.77 | 16 |
| FastPoint RCNN[ | 81.87 | 77.48 | 65 |
| TANet[ | 80.56 | 75.62 | 38 |
| Associate-3Ddet[ | 82.07 | 77.76 | 60 |
| HVNet[ | 78.86 | 71.79 | 32 |
| PointRCNN[ | 81.63 | 77.38 | 100 |
| SECOND-Gaussian+[ | 81.69 | 77.44 | 68 |
| SA-SSD[ | 82.95 | 78.78 | 40 |
| Part-A2[ | 82.49 | 78.54 | 83 |
| WP-CMT(本文方法) | 84.24 | 79.22 | 87 |
| 检测方法 | AP 3D/% (IoU=0.7) | ||
|---|---|---|---|
| 简单 | 中等 | 困难 | |
| AVOD[ | 83.07 | 71.76 | 65.73 |
| F-PointNet[ | 82.19 | 69.79 | 60.59 |
| PI-RCNN[ | 84.37 | 74.82 | 70.03 |
| SECOND[ | 83.13 | 73.66 | 66.20 |
| PointPillars[ | 82.58 | 74.31 | 68.99 |
| Fast PointRCNN[ | 85.29 | 77.40 | 70.24 |
| TANet[ | 83.81 | 75.38 | 67.66 |
| Associate-3Ddet[ | 85.99 | 77.40 | 70.53 |
| PointRCNN[ | 86.96 | 75.64 | 70.70 |
| MSPTRCNN[ | 87.45 | 77.44 | 70.39 |
| Part-A2[ | 87.81 | 78.49 | 73.51 |
| Pointformer[ | 87.13 | 77.06 | 69.25 |
| SA-SSD[ | 88.75 | 79.79 | 74.16 |
| WP-CMT(本文方法) | 87.47 | 80.52 | 76.02 |
Tab. 2 Comparison of different methods on KITTI test set for car class
| 检测方法 | AP 3D/% (IoU=0.7) | ||
|---|---|---|---|
| 简单 | 中等 | 困难 | |
| AVOD[ | 83.07 | 71.76 | 65.73 |
| F-PointNet[ | 82.19 | 69.79 | 60.59 |
| PI-RCNN[ | 84.37 | 74.82 | 70.03 |
| SECOND[ | 83.13 | 73.66 | 66.20 |
| PointPillars[ | 82.58 | 74.31 | 68.99 |
| Fast PointRCNN[ | 85.29 | 77.40 | 70.24 |
| TANet[ | 83.81 | 75.38 | 67.66 |
| Associate-3Ddet[ | 85.99 | 77.40 | 70.53 |
| PointRCNN[ | 86.96 | 75.64 | 70.70 |
| MSPTRCNN[ | 87.45 | 77.44 | 70.39 |
| Part-A2[ | 87.81 | 78.49 | 73.51 |
| Pointformer[ | 87.13 | 77.06 | 69.25 |
| SA-SSD[ | 88.75 | 79.79 | 74.16 |
| WP-CMT(本文方法) | 87.47 | 80.52 | 76.02 |
| 检测方法 | mAP/%(IoU=0.7) | mAPH/%(IoU=0.7) | ||
|---|---|---|---|---|
| 级别1 | 级别2 | 级别1 | 级别2 | |
| Pointpillars[ | 63.30 | 55.20 | 62.70 | 54.70 |
| SECOND[ | 68.03 | 59.57 | 67.44 | 59.04 |
| StarNet[ | 64.70 | 45.50 | 56.30 | 39.60 |
| MVF[ | 62.93 | — | — | — |
| PointRCNN[ | 45.05 | 37.41 | 44.25 | 36.74 |
| Pyramid-P[ | 47.02 | 39.10 | 46.58 | 38.76 |
| Part-A2[ | 71.69 | 64.21 | 71.16 | 63.70 |
| WP-CMT | 73.04 | 65.80 | 72.52 | 65.31 |
Tab. 3 Comparison of different methods on validation sequences of Waymo dataset
| 检测方法 | mAP/%(IoU=0.7) | mAPH/%(IoU=0.7) | ||
|---|---|---|---|---|
| 级别1 | 级别2 | 级别1 | 级别2 | |
| Pointpillars[ | 63.30 | 55.20 | 62.70 | 54.70 |
| SECOND[ | 68.03 | 59.57 | 67.44 | 59.04 |
| StarNet[ | 64.70 | 45.50 | 56.30 | 39.60 |
| MVF[ | 62.93 | — | — | — |
| PointRCNN[ | 45.05 | 37.41 | 44.25 | 36.74 |
| Pyramid-P[ | 47.02 | 39.10 | 46.58 | 38.76 |
| Part-A2[ | 71.69 | 64.21 | 71.16 | 63.70 |
| WP-CMT | 73.04 | 65.80 | 72.52 | 65.31 |
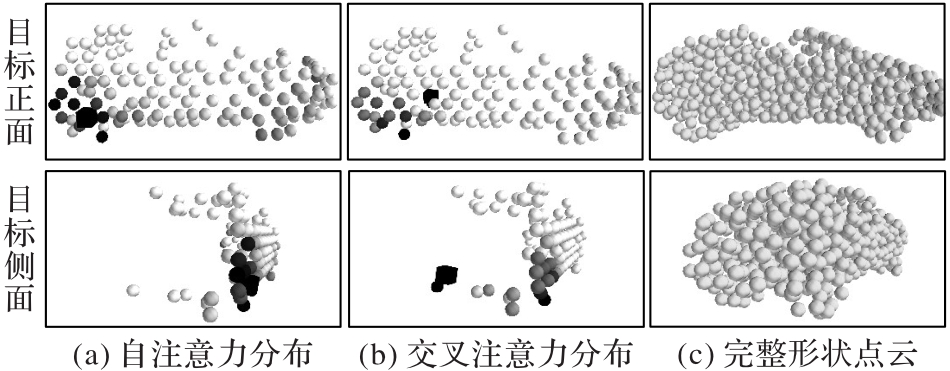
Fig. 6 Attention map visualization and complete shape point cloud of object in TPC module
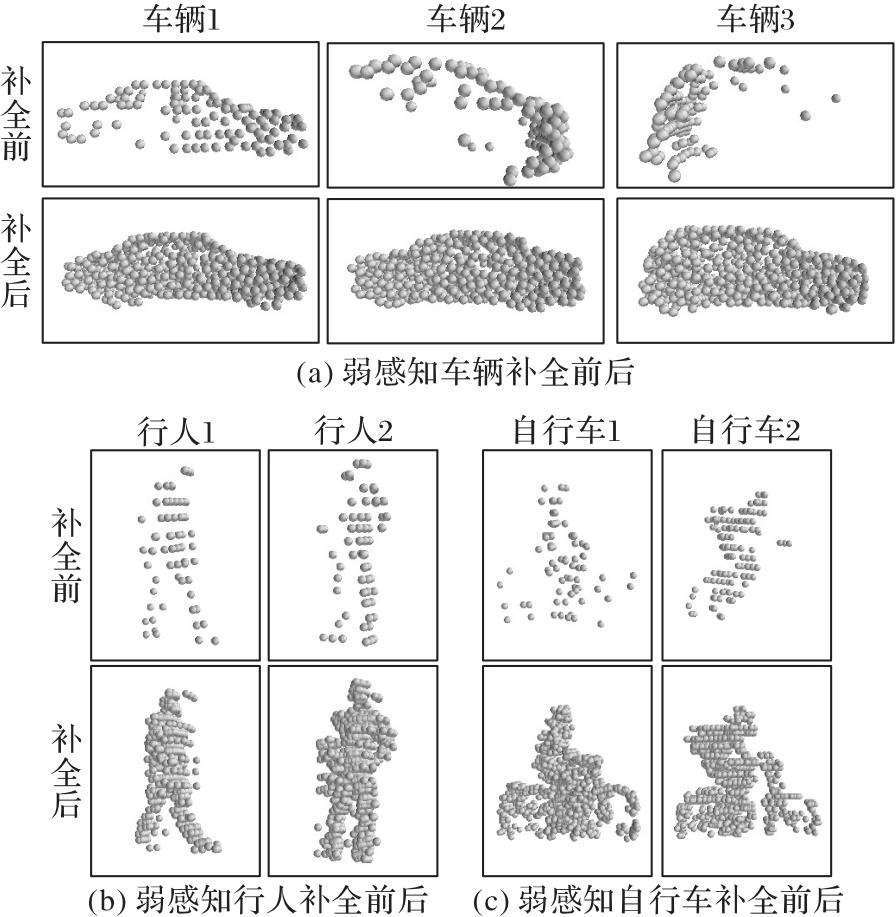
Fig. 7 Completion results of TPC module
| 实验序号 | 检测方法 | AP 3D/% (IoU=0.7) | AP 3D/% (IoU=0.5) | ||||
|---|---|---|---|---|---|---|---|
| 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | ||
| A | 消融基线 | 88.98 | 79.11 | 77.82 | 90.59 | 89.20 | 89.14 |
| B | 消融基线+MTE | 89.18 | 81.77 | 78.24 | 95.64 | 89.61 | 89.33 |
| C | 消融基线+TPC | 89.03 | 80.67 | 78.02 | 94.77 | 89.52 | 89.18 |
| D | WP-CMT | 89.58 | 83.93 | 79.22 | 97.14 | 89.67 | 89.35 |
| E | Part-A2 | 89.47 | 79.47 | 78.54 | 94.71 | 89.27 | 89.03 |
Tab. 4 Ablation experimental results of TPC and MTE modules
| 实验序号 | 检测方法 | AP 3D/% (IoU=0.7) | AP 3D/% (IoU=0.5) | ||||
|---|---|---|---|---|---|---|---|
| 简单 | 中等 | 困难 | 简单 | 中等 | 困难 | ||
| A | 消融基线 | 88.98 | 79.11 | 77.82 | 90.59 | 89.20 | 89.14 |
| B | 消融基线+MTE | 89.18 | 81.77 | 78.24 | 95.64 | 89.61 | 89.33 |
| C | 消融基线+TPC | 89.03 | 80.67 | 78.02 | 94.77 | 89.52 | 89.18 |
| D | WP-CMT | 89.58 | 83.93 | 79.22 | 97.14 | 89.67 | 89.35 |
| E | Part-A2 | 89.47 | 79.47 | 78.54 | 94.71 | 89.27 | 89.03 |

Fig. 8 Comparison of recall under different IoU values
| AF子模块中各步操作 | AP 3D/% (IoU=0.7) | |||||
|---|---|---|---|---|---|---|
| 拼接 | 加权 | 激活 | 残差 | 简单 | 中等 | 困难 |
| √ | × | × | × | 89.23 | 82.95 | 78.80 |
| √ | √ | × | × | 89.45 | 83.82 | 79.15 |
| √ | √ | √ | × | 89.49 | 83.85 | 79.18 |
| √ | √ | √ | √ | 89.58 | 83.93 | 79.22 |
Tab. 5 Results of ablation experiments for AF sub-module
| AF子模块中各步操作 | AP 3D/% (IoU=0.7) | |||||
|---|---|---|---|---|---|---|
| 拼接 | 加权 | 激活 | 残差 | 简单 | 中等 | 困难 |
| √ | × | × | × | 89.23 | 82.95 | 78.80 |
| √ | √ | × | × | 89.45 | 83.82 | 79.15 |
| √ | √ | √ | × | 89.49 | 83.85 | 79.18 |
| √ | √ | √ | √ | 89.58 | 83.93 | 79.22 |
| 实验序号 | 方法 | AP 3D/% (IoU=0.7) | ||
|---|---|---|---|---|
| 简单 | 中等 | 困难 | ||
| F | PointNet++编码 | 89.29 | 82.99 | 78.56 |
| G | MT编码 (本文方法) | 89.58 | 83.93 | 79.22 |
Tab. 6 Comparison of different feature encoding sub-modules in MTE module
| 实验序号 | 方法 | AP 3D/% (IoU=0.7) | ||
|---|---|---|---|---|
| 简单 | 中等 | 困难 | ||
| F | PointNet++编码 | 89.29 | 82.99 | 78.56 |
| G | MT编码 (本文方法) | 89.58 | 83.93 | 79.22 |
| 方法 | AP 3D/% (IoU=0.7) | ||
|---|---|---|---|
| 简单 | 中等 | 困难 | |
| PointRCNN | 88.88 | 78.63 | 77.39 |
| PointRCNN+TPC+MTE | 89.49 | 79.98 | 78.62 |
| Part-A2 | 89.47 | 79.47 | 78.54 |
| Part-A2+TPC+MTE(本文方法) | 89.58 | 83.93 | 79.22 |
Tab. 7 Comparison of different RPN structures
| 方法 | AP 3D/% (IoU=0.7) | ||
|---|---|---|---|
| 简单 | 中等 | 困难 | |
| PointRCNN | 88.88 | 78.63 | 77.39 |
| PointRCNN+TPC+MTE | 89.49 | 79.98 | 78.62 |
| Part-A2 | 89.47 | 79.47 | 78.54 |
| Part-A2+TPC+MTE(本文方法) | 89.58 | 83.93 | 79.22 |

Fig. 9 Visual detection results of weakly perceived objects in complex scenes
| 1 | CHEN X Z, MA H M, WAN J, et al. Multi-view 3D object detection network for autonomous driving [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6526-6534. 10.1109/cvpr.2017.691 |
| 2 | KU J, MOZIFIAN M, LEE J, et al. Joint 3D proposal generation and object detection from view aggregation [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2018: 1-8. 10.1109/iros.2018.8594049 |
| 3 | LIANG M, YANG B, CHEN Y, et al. Multi-task multi-sensor fusion for 3D object detection [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 7337-7345. 10.1109/cvpr.2019.00752 |
| 4 | ZHOU Y, SUN P, ZHANG Y, et al. End-to-end multi-view fusion for 3D object detection in LiDAR point clouds [C]// Proceedings of the 3rd Conference on Robot Learning. New York: JMLR.org, 2020: 923-932. |
| 5 | DENG J J, ZHOU W G, ZHANG Y Y, et al. From multi-view to Hollow-3D: hallucinated Hollow-3D R-CNN for 3D object detection[J]. IEEE Transactions on Circuits Systems for Video Technology, 2021, 31(12): 4722-4734. 10.1109/tcsvt.2021.3100848 |
| 6 | QI C R, SU H, MO K C, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. 10.1109/cvpr.2017.16 |
| 7 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017: 5105-5114. |
| 8 | QI C R, LIU W, WU C X, et al. Frustum PointNets for 3D object detection from RGB-D data [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 918-927. 10.1109/cvpr.2018.00102 |
| 9 | QI C R, LITANY O, HE K M, et al. Deep Hough voting for 3D object detection in point clouds [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 9276-9285. 10.1109/iccv.2019.00937 |
| 10 | SHI S S, WANG X G, LI H S. PointRCNN: 3D object proposal generation and detection from point cloud [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 770-779. 10.1109/cvpr.2019.00086 |
| 11 | YANG Z T, SUN Y N, LIU S, et al. 3DSSD: point-based 3D single stage object detector [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11037-11045. 10.1109/cvpr42600.2020.01105 |
| 12 | MISRA I, GIRDHAR R, JOULIN A. An end-to-end transformer model for 3D object detection [C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 2886-2897. 10.1109/iccv48922.2021.00290 |
| 13 | LIU Z, ZHANG Z, CAO Y, et al. Group-free 3D object detection via transformers [C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 2929-2938. 10.1109/iccv48922.2021.00294 |
| 14 | PAN X R, XIA Z F, SONG S J, et al. 3D object detection with Pointformer [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 7459-7468. 10.1109/cvpr46437.2021.00738 |
| 15 | 孙刘杰,赵进,王文举,等.多尺度Transformer激光雷达点云3D物体检测[J].计算机工程与应用, 2022, 58(8): 136-146. 10.3778/j.issn.1002-8331.2109-0489 |
| SUN L J, ZHAO J, WANG W J, et al. Multi-scale transformer LiDAR point cloud 3D object detection[J]. Computer Engineering and Applications, 2022, 58(8): 136-146. 10.3778/j.issn.1002-8331.2109-0489 | |
| 16 | ZHANG Y F, HU Q Y, XU G Q, et al. Not all points are equal: learning highly efficient point-based detectors for 3D LiDAR point clouds [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 18931-18940. 10.1109/cvpr52688.2022.01838 |
| 17 | YAN Y, MAO Y X, LI B. SECOND: sparsely embedded convolutional detection[J]. Sensors, 2018, 18(10): No.3337. 10.3390/s18103337 |
| 18 | LANG A H, VORA S, CAESAR H, et al. PointPillars: fast encoders for object detection from point clouds [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 12689-12697. 10.1109/cvpr.2019.01298 |
| 19 | LIU Z, ZHAO X, HUANG T T, et al. TANet: robust 3D object detection from point clouds with triple attention [C]// Proceedings of the 34th AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2020: 11677-11684. 10.1609/aaai.v34i07.6837 |
| 20 | YE M S, XU S J, CAO T Y. HVNet: hybrid voxel network for LiDAR based 3D object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1628-1637. 10.1109/cvpr42600.2020.00170 |
| 21 | DENG J J, SHI S S, LI P W, et al. Voxel R-CNN: towards high performance voxel-based 3D object detection [C]// Proceedings of the 35th AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2021: 1201-1209. 10.1609/aaai.v35i2.16207 |
| 22 | ZHANG W C, LI W, XU D. SRDAN: scale-aware and range-aware domain adaptation network for cross-dataset 3D object detection [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 6765-6775. 10.1109/cvpr46437.2021.00670 |
| 23 | HE C H, LI R H, LI S, et al. Voxel set Transformer: a set-to-set approach to 3D object detection from point clouds [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 8407-8417. 10.1109/cvpr52688.2022.00823 |
| 24 | HE C H, ZENG H, HUANG J Q, et al. Structure aware single-stage 3D object detection from point cloud [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11870-11879. 10.1109/cvpr42600.2020.01189 |
| 25 | SHI S S, WANG Z, SHI J P, et al. From points to parts: 3D object detection from point cloud with part-aware and part-aggregation network[J]. IEEE Transactions on Pattern Analysis Machine Intelligence, 2021, 43(8): 2647-2664. |
| 26 | XIE L, XIANG C, YU Z X, et al. PI-RCNN: an efficient multi-sensor 3D object detector with point-based attentive Cont-Conv fusion module [C]// Proceedings of the 34th AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2020: 12460-12467. 10.1609/aaai.v34i07.6933 |
| 27 | CHEN Y L, LIU S, SHEN X Y, et al. Fast point R-CNN [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 9774-9783. 10.1109/iccv.2019.00987 |
| 28 | DU L, YE X Q, TAN X, et al. Associate-3Ddet: perceptual-to-conceptual association for 3D point cloud object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 13326-13335. 10.1109/cvpr42600.2020.01334 |
| 29 | 裴仪瑶,郭会明,张丹普,等.基于定位不确定性的鲁棒3D目标检测方法[J].计算机应用, 2021, 41(10): 2979-2984. 10.11772/j.issn.1001-9081.2020122055 |
| PEI Y Y, GUO H M, ZHANG D P, et al. Robust 3D object detection method based on localization uncertainty[J]. Journal of Computer Applications, 2021, 41(10): 2979-2984. 10.11772/j.issn.1001-9081.2020122055 | |
| 30 | NGIAM J, CAINE B, HAN W, et al. StarNet: targeted computation for object detection in point clouds[EB/OL]. (2019-12-02) [2022-06-19]. . |
| 31 | MAO J G, NIU M Z, BAI H Y, et al. Pyramid R-CNN: towards better performance and adaptability for 3D object detection [C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 2703-2712. 10.1109/iccv48922.2021.00272 |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||