


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (5): 1511-1519.DOI: 10.11772/j.issn.1001-9081.2023050800
Special Issue: 第十九届中国机器学习会议(CCML 2023)
• The 19th China Conference on Machine Learning (CCML 2023) • Previous Articles Next Articles
Zhiyuan XI1, Chao TANG1( ), Anyang TONG1, Wenjian WANG2
), Anyang TONG1, Wenjian WANG2
Received:2023-06-21
Revised:2023-07-14
Accepted:2023-07-24
Online:2023-08-01
Published:2024-05-10
Contact:
Chao TANG
About author:XI Zhiyuan, born in 1995, M. S. candidate. His research interests include machine learning, computer vision.Supported by:
席治远1, 唐超1(), 童安炀1, 王文剑2
通讯作者:
唐超
作者简介:席治远(1995—),男,安徽合肥人,硕士研究生,CCF会员,主要研究方向:机器学习、计算机视觉基金资助:CLC Number:
Zhiyuan XI, Chao TANG, Anyang TONG, Wenjian WANG. Driver behavior recognition based on dual-path spatiotemporal network[J]. Journal of Computer Applications, 2024, 44(5): 1511-1519.
席治远, 唐超, 童安炀, 王文剑. 基于双路时空网络的驾驶员行为识别[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1511-1519.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023050800

Fig. 1 Framework of proposed recognition method

Fig. 2 Process of video sample preprocessing

Fig. 3 Structure of improved TSN

Fig. 4 Serial spatiotemporal network structure

Fig. 5 Examples of YawDD dataset

Fig. 6 Examples of SF-DDDD dataset
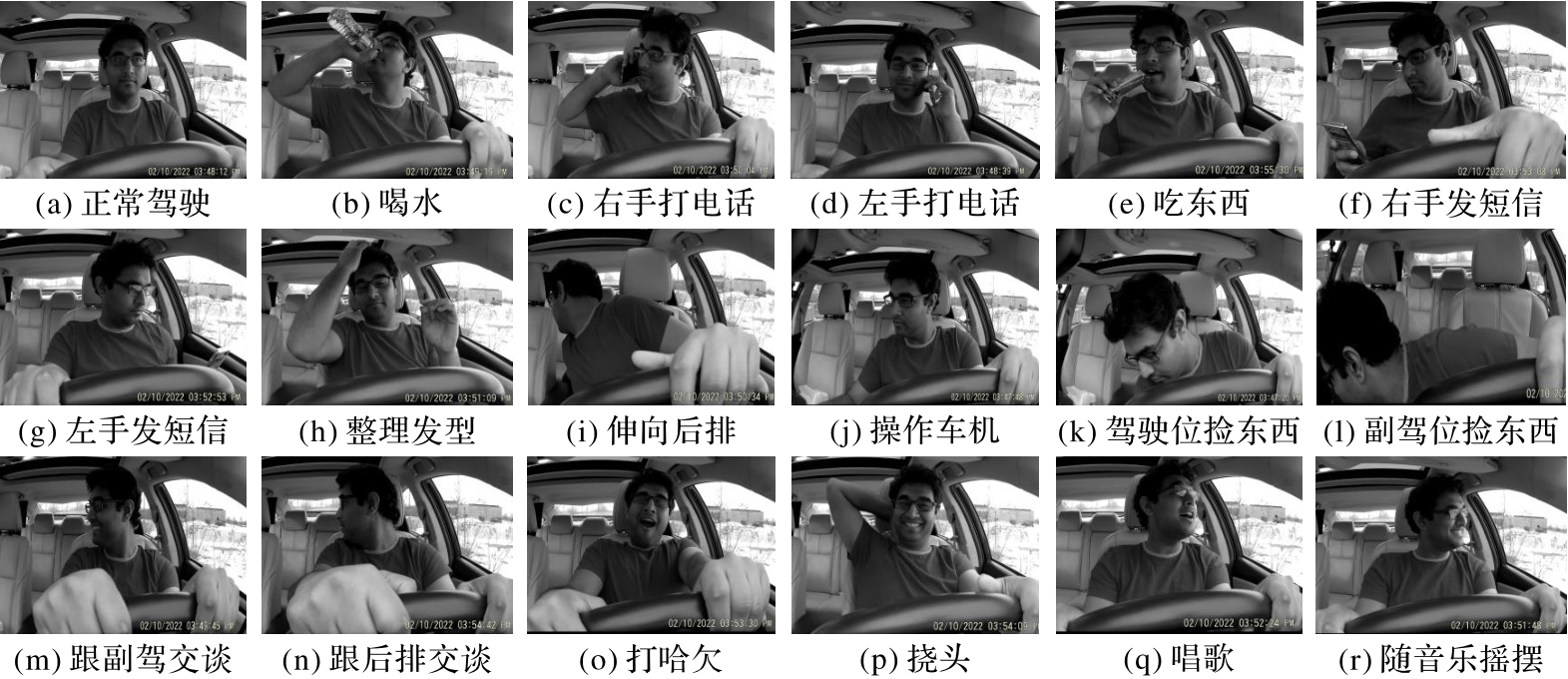
Fig. 7 Examples of SynDD1 dataset
| 环境 | 参数 | 环境 | 参数 |
|---|---|---|---|
| 操作系统 | Windows10 | PyTorch | 1.8.1 |
| 显卡 | RTX3060 | CUDA | 11.3.1 |
| Python | 3.9 |
Tab. 2 Experimental environment
| 环境 | 参数 | 环境 | 参数 |
|---|---|---|---|
| 操作系统 | Windows10 | PyTorch | 1.8.1 |
| 显卡 | RTX3060 | CUDA | 11.3.1 |
| Python | 3.9 |
| 方法 | YawDD | SF-DDDD | SynDD1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Acc | P | R | F1 | Acc | P | R | F1 | Acc | P | R | F1 | |
| CNNtemporal | 95.50 | 95.47 | 95.47 | 95.47 | 84.89 | 84.83 | 84.83 | 84.83 | 86.20 | 86.21 | 86.21 | 86.21 |
| CNNspatio | 99.64 | 99.65 | 99.65 | 99.65 | 99.51 | 99.51 | 99.50 | 99.50 | 97.20 | 97.21 | 97.18 | 97.20 |
| TSN(a) | 99.63 | 99.65 | 99.64 | 99.64 | 98.72 | 98.68 | 98.70 | 98.69 | 97.17 | 97.18 | 97.17 | 97.17 |
| TSN(b) | 99.70 | 99.68 | 99.71 | 99.70 | 99.46 | 99.44 | 99.41 | 99.42 | 97.22 | 97.23 | 97.23 | 97.23 |
| TSN(b)-PCA | 99.56 | 99.60 | 99.56 | 99.58 | 99.33 | 99.34 | 99.37 | 99.35 | 97.25 | 97.23 | 97.24 | 97.24 |
| TSN(b)-KPCA | 99.72 | 99.71 | 99.73 | 99.72 | 99.55 | 99.57 | 99.56 | 99.56 | 98.43 | 98.41 | 98.40 | 98.40 |
| DPST(a) | 99.81 | 99.80 | 99.80 | 99.80 | 99.71 | 99.72 | 99.73 | 99.72 | 98.51 | 98.49 | 98.50 | 98.49 |
| DPST(b) | 99.85 | 99.83 | 99.85 | 99.84 | 99.94 | 99.94 | 99.95 | 99.95 | 98.77 | 98.77 | 98.77 | 98.77 |
Tab. 3 Ablation experiment results of proposed method
| 方法 | YawDD | SF-DDDD | SynDD1 | |||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| Acc | P | R | F1 | Acc | P | R | F1 | Acc | P | R | F1 | |
| CNNtemporal | 95.50 | 95.47 | 95.47 | 95.47 | 84.89 | 84.83 | 84.83 | 84.83 | 86.20 | 86.21 | 86.21 | 86.21 |
| CNNspatio | 99.64 | 99.65 | 99.65 | 99.65 | 99.51 | 99.51 | 99.50 | 99.50 | 97.20 | 97.21 | 97.18 | 97.20 |
| TSN(a) | 99.63 | 99.65 | 99.64 | 99.64 | 98.72 | 98.68 | 98.70 | 98.69 | 97.17 | 97.18 | 97.17 | 97.17 |
| TSN(b) | 99.70 | 99.68 | 99.71 | 99.70 | 99.46 | 99.44 | 99.41 | 99.42 | 97.22 | 97.23 | 97.23 | 97.23 |
| TSN(b)-PCA | 99.56 | 99.60 | 99.56 | 99.58 | 99.33 | 99.34 | 99.37 | 99.35 | 97.25 | 97.23 | 97.24 | 97.24 |
| TSN(b)-KPCA | 99.72 | 99.71 | 99.73 | 99.72 | 99.55 | 99.57 | 99.56 | 99.56 | 98.43 | 98.41 | 98.40 | 98.40 |
| DPST(a) | 99.81 | 99.80 | 99.80 | 99.80 | 99.71 | 99.72 | 99.73 | 99.72 | 98.51 | 98.49 | 98.50 | 98.49 |
| DPST(b) | 99.85 | 99.83 | 99.85 | 99.84 | 99.94 | 99.94 | 99.95 | 99.95 | 98.77 | 98.77 | 98.77 | 98.77 |

Fig. 8 Data visualization of DPST and tTSN-K on three experimental datasets

Fig. 9 Confusion matrixes of proposed method on three experiment datasets
| 方法 | YawDD | SF-DDDD | SynDD1 | 方法 | YawDD | SF-DDDD | SynDD1 |
|---|---|---|---|---|---|---|---|
| LSTM[ | 88.60 | — | — | PCA+CNN[ | — | 97.31 | — |
| EAR+CNN[ | 91.00 | 97.50 | — | AlexNet[ | — | 99.49 | — |
| 多特征融合SVM[ | 94.32 | — | — | VGG16[ | — | 99.57 | — |
| CNN+Bi-LSTM[ | 96.48 | — | — | MoviNet-A0[ | — | — | 97.13 |
| 改进CNN[ | 99.35 | — | — | 本文方法 | 99.85 | 99.94 | 98.77 |
Tab. 4 Comparison of accuracy of different methods on three experimental datasets
| 方法 | YawDD | SF-DDDD | SynDD1 | 方法 | YawDD | SF-DDDD | SynDD1 |
|---|---|---|---|---|---|---|---|
| LSTM[ | 88.60 | — | — | PCA+CNN[ | — | 97.31 | — |
| EAR+CNN[ | 91.00 | 97.50 | — | AlexNet[ | — | 99.49 | — |
| 多特征融合SVM[ | 94.32 | — | — | VGG16[ | — | 99.57 | — |
| CNN+Bi-LSTM[ | 96.48 | — | — | MoviNet-A0[ | — | — | 97.13 |
| 改进CNN[ | 99.35 | — | — | 本文方法 | 99.85 | 99.94 | 98.77 |
| 1 | OLSON R L, HANOWKI R J, HICKMAN J S, et al. Driver distraction in commercial vehicle operations: FMCSA-RRT-09-042[R]. Washington, DC: United States Department of Transportation, 2009-09-01. |
| 2 | LIU F, LI X, LV T, et al. A review of driver fatigue detection: progress and prospect[C]// Proceedings of the 2019 IEEE International Conference on Consumer Electronics. Piscataway: IEEE, 2019: 1-6. 10.1109/icce.2019.8662098 |
| 3 | SIKANDER G, ANWAR S. Driver fatigue detection systems: a review[J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(6): 2339-2352. 10.1109/tits.2018.2868499 |
| 4 | KALAYCI T E, KALAYCI E G, LECHNER G, et al. Triangulated investigation of trust in automated driving: challenges and solution approaches for data integration[J]. Journal of Industrial Information Integration, 2021, 21: 100186. 10.1016/j.jii.2020.100186 |
| 5 | ABTAHI S, OMIDYEGANEH M, SHIRMOHAMMADI S, et al. YawDD: a yawning detection dataset[C]// Proceedings of the 5th ACM Multimedia Systems Conference. New York: ACM, 2014: 24-28. 10.1145/2557642.2563678 |
| 6 | RAHMAN M S, VENKATACHALAPATHY A, SHARMA A, et al. Synthetic distracted driving (SynDD1) dataset for analyzing distracted behaviors and various gaze zones of a driver[J]. Data in Brief, 2022, 46: 108793. 10.1016/j.dib.2022.108793 |
| 7 | KASHEVNIK A, SHCHEDRIN R, KAISER C, et al. Driver distraction detection methods: a literature review and framework[J]. IEEE Access, 2021, 9: 60063-60076. 10.1109/access.2021.3073599 |
| 8 | WANG J, CHAI W, VENKATACHALAPATHY A, et al. A survey on driver behavior analysis from in-vehicle cameras[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 10186-10209. 10.1109/tits.2021.3126231 |
| 9 | MURPHY-CHUTORIAN E, TRIVEDI M M. Head pose estimation and augmented reality tracking: an integrated system and evaluation for monitoring driver awareness[J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(2): 300-311. 10.1109/tits.2010.2044241 |
| 10 | ZHANG W, ZHANG H. Research on distracted driving identification of truck drivers based on simulated driving experiment[J]. IOP Conference Series: Earth and Environmental Science, 2021, 638: 012039. 10.1088/1755-1315/638/1/012039 |
| 11 | OHN-BAR E, MARTIN S, TAWARI A, et al. Head, eye, and hand patterns for driver activity recognition[C]// Proceedings of the 2014 22nd International Conference on Pattern Recognition. Piscataway: IEEE, 2014: 660-665. 10.1109/icpr.2014.124 |
| 12 | ZHANG L, TAN B, LIU T, et al. Research on recognition of dangerous driving behavior based on support vector machine[C/OL]// Proceedings of the Twelfth International Conference on Graphics and Image Processing. Bellingham: SPIE, 2021, 11720[2023-05-01]. . |
| 13 | BRAUNAGEL C, KASNECI E, STOLZMANN W, et al. Driver-activity recognition in the context of conditionally autonomous driving[C]// Proceedings of the 2015 IEEE 18th International Conference on Intelligent Transportation Systems. Piscataway: IEEE, 2015: 1652-1657. 10.1109/itsc.2015.268 |
| 14 | HOU Z, OU S, XU D. Research on fatigue driving feature detection algorithms of drivers based on machine learning[J]. Systems Science & Control Engineering, 2021, 9(1): 167-172. 10.1080/21642583.2021.1888819 |
| 15 | OKON O D, MENG L. Detecting distracted driving with deep learning[C]// Proceedings of the 2017 International Conference on Interactive Collaborative Robotics. Cham: Springer, 2017: 170-179. 10.1007/978-3-319-66471-2_19 |
| 16 | KOESDWIADY A, BEDAWI S M, OU C, et al. End-to-end deep learning for driver distraction recognition[C]// Proceedings of the 2017 International Conference on Image Analysis and Recognition. Cham: Springer, 2017: 11-18. 10.1007/978-3-319-59876-5_2 |
| 17 | JAIN A, KOPPULA H S, SOH S, et al. Brain4Cars: car that knows before you do via sensory-fusion deep learning architecture[EB/OL]. [2022-12-26]. . 10.1109/iccv.2015.364 |
| 18 | TONG A, TANG C, WANG W. Semi-supervised action recognition from temporal augmentation using curriculum learning[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2023,33(3): 1305-1319. 10.1109/tcsvt.2022.3210271 |
| 19 | REN F, TANG C, TONG A, et al. Skeleton-based human action recognition by fusing attention based three-stream convolutional neural network and SVM[J]. Multimedia Tools and Applications, 2024, 83: 6273-6295. 10.1007/s11042-023-15334-9 |
| 20 | FARNEBÄCK G. Two-frame motion estimation based on polynomial expansion[C]// Proceedings of the 13th Scandinavian Conference on Image Analysis. Berlin: Springer, 2003: 363-370. 10.1007/3-540-45103-x_50 |
| 21 | TAMURA M, VISHWAKARMA R, VENNELAKANTI R. Hunting group clues with Transformers for social group activity recognition [C]// Proceedings of the 17th European Conference on Computer Vision. Cham: Springer, 2022: 19-35. 10.1007/978-3-031-19772-7_2 |
| 22 | SIMONYAN K, ZISSERMAN A. Two-stream convolutional networks for action recognition in videos[C]// Proceedings of the 27th International Conference on Neural Information Processing Systems. Cambridge: MIT Press, 2014: 568-576. 10.1002/14651858.CD001941.pub3 |
| 23 | SCHOLKOPF B, SMOLA A, MULLER K R. Kernel principal component analysis [C]// Proceedings of the 1997 International Conference on Artificial Neural Networks. Berlin: Springer, 1997: 583-588. 10.1007/bfb0020217 |
| 24 | YANG J, YANG J-Y, ZHANG D, et al. Feature fusion: parallel strategy vs. serial strategy[J]. Pattern Recognition, 2003, 36(6): 1369-1381. 10.1016/s0031-3203(02)00262-5 |
| 25 | HAN M, ZHANG D J, WANG Y, et al. Dual-AI: dual-path actor interaction learning for group activity recognition[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 2980-2989. 10.1109/cvpr52688.2022.00300 |
| 26 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| 27 | ZHANG W, SU J. Driver yawning detection based on long short term memory networks[C]// Proceedings of the 2017 IEEE Symposium Series on Computational Intelligence. Piscataway: IEEE, 2017: 1-5. 10.1109/ssci.2017.8285343 |
| 28 | DONG B-T, LIN H-Y. An on-board monitoring system for driving fatigue and distraction detection[C]// Proceedings of the 2021 22nd IEEE International Conference on Industrial Technology. Piscataway: IEEE, 2021: 850-855. 10.1109/icit46573.2021.9453676 |
| 29 | YOU F, GONG Y, TU H, et al. A fatigue driving detection algorithm based on facial motion information entropy[J]. Journal of Advanced Transportation, 2020, 2020: 8851485. 10.1155/2020/8851485 |
| 30 | SAURAV S, MATHUR S, SANG I, et al. Yawn detection for driver’s drowsiness prediction using bi-directional LSTM with CNN features [C]// Proceedings of the 11th Intelligent Human Computer Interaction. Cham: Springer, 2020: 189-200. 10.1007/978-3-030-44689-5_17 |
| 31 | SAVAŞ B K, BECERIKLI Y. A deep learning approach to driver fatigue detection via mouth state analyses and yawning detection[J]. IOSR Journal of Computer Engineering, 2021, 23(3): 24-30. |
| 32 | RAO X, LIN F, CHEN Z, et al. Distracted driving recognition method based on deep convolutional neural network[J]. Journal of Ambient Intelligence and Humanized Computing, 2021, 12: 193-200. 10.1007/s12652-019-01597-4 |
| 33 | UNADKAT V, SAYANI P, KAPADIA H, et al. Automated system for detecting distracted driver[C]// Proceedings of the 2018 4th International Conference on Computing Communication and Automation. Piscataway: IEEE, 2018: 1-4. 10.1109/ccaa.2018.8777709 |
| 34 | MASOOD S, RAI A, AGGARWAL A, et al. Detecting distraction of drivers using convolutional neural network[J]. Pattern Recognition Letters, 2020, 139: 79-85. 10.1016/j.patrec.2017.12.023 |
| 35 | H-Q NGUYEN, T-B NGUYEN, TRAN T K, et al. End-to-end deep learning-based framework for driver action recognition[C]// Proceedings of the 2022 International Conference on Multimedia Analysis and Pattern Recognition. Piscataway: IEEE, 2022: 1-6. 10.1109/mapr56351.2022.9924944 |
| [1] | Yunchuan HUANG, Yongquan JIANG, Juntao HUANG, Yan YANG. Molecular toxicity prediction based on meta graph isomorphism network [J]. Journal of Computer Applications, 2024, 44(9): 2964-2969. |
| [2] | Xin YANG, Xueni CHEN, Chunjiang WU, Shijie ZHOU. Short-term traffic flow prediction of urban highway based on variant residual model and Transformer [J]. Journal of Computer Applications, 2024, 44(9): 2947-2951. |
| [3] | Jieru JIA, Jianchao YANG, Shuorui ZHANG, Tao YAN, Bin CHEN. Unsupervised person re-identification based on self-distilled vision Transformer [J]. Journal of Computer Applications, 2024, 44(9): 2893-2902. |
| [4] | Jinjin LI, Guoming SANG, Yijia ZHANG. Multi-domain fake news detection model enhanced by APK-CNN and Transformer [J]. Journal of Computer Applications, 2024, 44(9): 2674-2682. |
| [5] | Jiepo FANG, Chongben TAO. Hybrid internet of vehicles intrusion detection system for zero-day attacks [J]. Journal of Computer Applications, 2024, 44(9): 2763-2769. |
| [6] | Liehong REN, Lyuwen HUANG, Xu TIAN, Fei DUAN. Multivariate long-term series forecasting method with DFT-based frequency-sensitive dual-branch Transformer [J]. Journal of Computer Applications, 2024, 44(9): 2739-2746. |
| [7] | Yuwei DING, Hongbo SHI, Jie LI, Min LIANG. Image denoising network based on local and global feature decoupling [J]. Journal of Computer Applications, 2024, 44(8): 2571-2579. |
| [8] | Kaili DENG, Weibo WEI, Zhenkuan PAN. Industrial defect detection method with improved masked autoencoder [J]. Journal of Computer Applications, 2024, 44(8): 2595-2603. |
| [9] | Fan YANG, Yao ZOU, Mingzhi ZHU, Zhenwei MA, Dawei CHENG, Changjun JIANG. Credit card fraud detection model based on graph attention Transformation neural network [J]. Journal of Computer Applications, 2024, 44(8): 2634-2642. |
| [10] | Dahai LI, Zhonghua WANG, Zhendong WANG. Dual-branch low-light image enhancement network combining spatial and frequency domain information [J]. Journal of Computer Applications, 2024, 44(7): 2175-2182. |
| [11] | Xiting LYU, Jinghua ZHAO, Haiying RONG, Jiale ZHAO. Information diffusion prediction model based on Transformer and relational graph convolutional network [J]. Journal of Computer Applications, 2024, 44(6): 1760-1766. |
| [12] | Xun YAO, Zhongzheng QIN, Jie YANG. Generative label adversarial text classification model [J]. Journal of Computer Applications, 2024, 44(6): 1781-1785. |
| [13] | Mengyuan HUANG, Kan CHANG, Mingyang LING, Xinjie WEI, Tuanfa QIN. Progressive enhancement algorithm for low-light images based on layer guidance [J]. Journal of Computer Applications, 2024, 44(6): 1911-1919. |
| [14] | Junfeng SHEN, Xingchen ZHOU, Can TANG. Dual-channel sentiment analysis model based on improved prompt learning method [J]. Journal of Computer Applications, 2024, 44(6): 1796-1806. |
| [15] | Shibin LI, Jun GONG, Shengjun TANG. Semi-supervised heterophilic graph representation learning model based on Graph Transformer [J]. Journal of Computer Applications, 2024, 44(6): 1816-1823. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||