


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (7): 2203-2210.DOI: 10.11772/j.issn.1001-9081.2024070944
• Artificial intelligence • Previous Articles Next Articles
Yingjun ZHANG1, Weiwei YAN1( ), Binhong XIE1, Rui ZHANG1, Wangdong LU2
), Binhong XIE1, Rui ZHANG1, Wangdong LU2
Received:2024-07-08
Revised:2024-10-09
Accepted:2024-10-09
Online:2025-07-10
Published:2025-07-10
Contact:
Weiwei YAN
About author:ZHANG Yingjun, born in 1969, M. S., professor of engineering. His research interests include intelligent software, software architecture.Supported by:
张英俊1, 闫薇薇1(), 谢斌红1, 张睿1, 陆望东2
通讯作者:
闫薇薇
作者简介:张英俊(1969—),男,山西河津人,教授级高级工程师,硕士,主要研究方向:智能化软件、软件体系结构基金资助:CLC Number:
Yingjun ZHANG, Weiwei YAN, Binhong XIE, Rui ZHANG, Wangdong LU. Gradient-discriminative and feature norm-driven open-world object detection[J]. Journal of Computer Applications, 2025, 45(7): 2203-2210.
张英俊, 闫薇薇, 谢斌红, 张睿, 陆望东. 梯度区分与特征范数驱动的开放世界目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(7): 2203-2210.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024070944
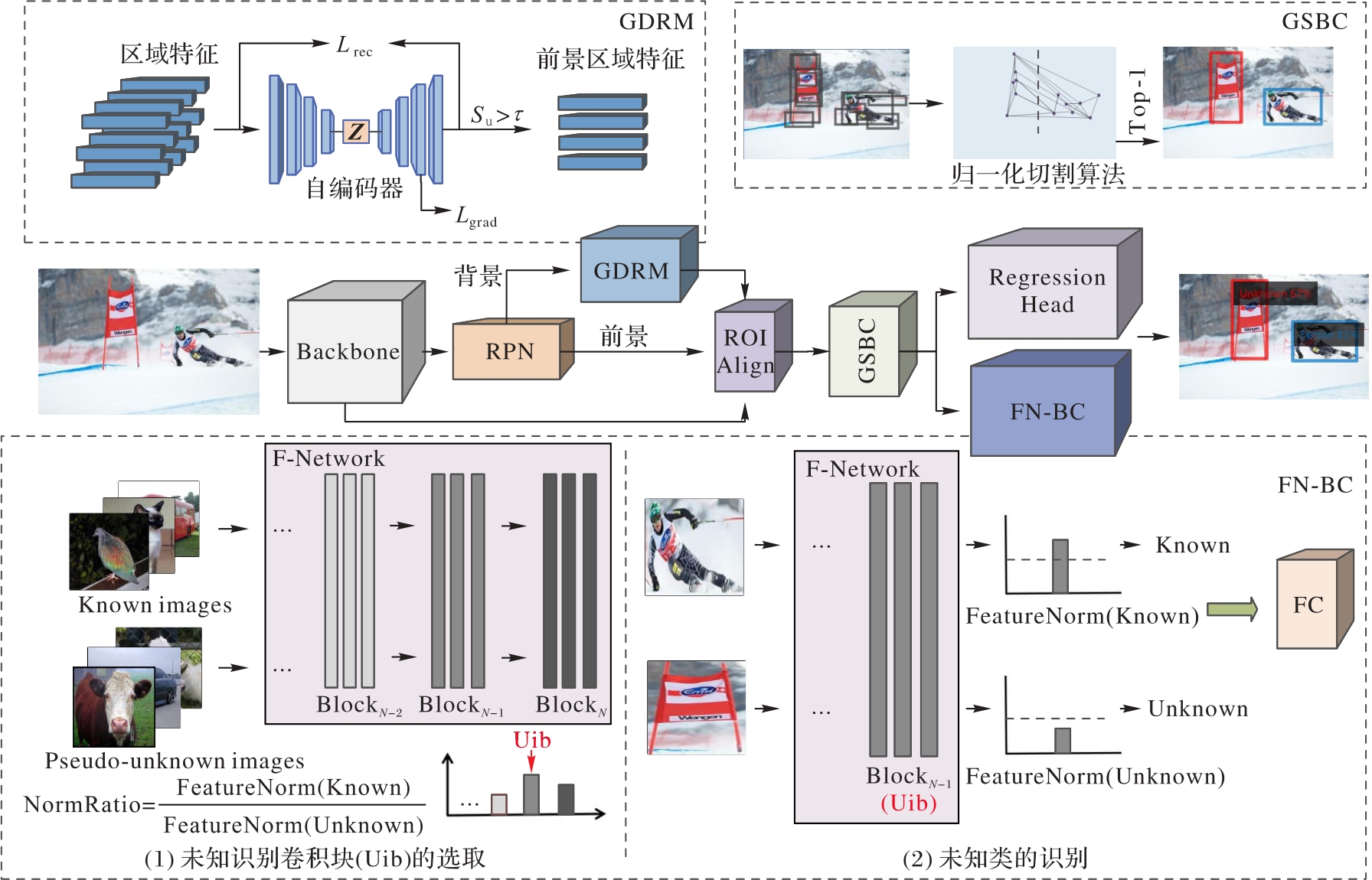
Fig. 1 GDFN-OWOD network structure
| Tt | 语义分割 | #训练图像 | #训练实例 | #测试图像 | #测试实例 |
|---|---|---|---|---|---|
| T1 | VOC Classes | 16 551 | 47 223 | 4 952 | 14 976 |
| T2 | Outdoor, Accessories,Appliance, Truck | 45 520 | 113 741 | 1 914 | 4 966 |
| T3 | Sports, Food | 39 402 | 114 452 | 1 642 | 4 826 |
| T4 | Electronic, Indoor,Kitchen, Furniture | 40 260 | 138 996 | 1 738 | 6 039 |
Tab. 1 OWOD experimental datasets
| Tt | 语义分割 | #训练图像 | #训练实例 | #测试图像 | #测试实例 |
|---|---|---|---|---|---|
| T1 | VOC Classes | 16 551 | 47 223 | 4 952 | 14 976 |
| T2 | Outdoor, Accessories,Appliance, Truck | 45 520 | 113 741 | 1 914 | 4 966 |
| T3 | Sports, Food | 39 402 | 114 452 | 1 642 | 4 826 |
| T4 | Electronic, Indoor,Kitchen, Furniture | 40 260 | 138 996 | 1 738 | 6 039 |
| 数据集 | 图片数 | 已知类实例数 | 未知类实例数 |
|---|---|---|---|
| VOC_Pretest | 200 | 5.09 | 0.00 |
| COCO-OOD | 504 | 0.00 | 3.28 |
Tab. 2 Information on experimental datasets of NCut threshold ε
| 数据集 | 图片数 | 已知类实例数 | 未知类实例数 |
|---|---|---|---|
| VOC_Pretest | 200 | 5.09 | 0.00 |
| COCO-OOD | 504 | 0.00 | 3.28 |
| Ti | 指标 | Faster R-CNN | Faster R-CNN+Finetuning | ORE-EBUI[ | UC-OWOD[ | OCPL[ | OW-DETR[ | BSDP[ | GDFN-OWOD | |
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | U-Recall | — | — | 4.9 | 2.4 | 8.3 | 7.5 | 8.3 | 9.4 | |
| mAP | Current Known | 60.3 | 60.3 | 56.0 | 50.7 | 56.6 | 59.2 | 56.2 | 61.2 | |
| T2 | U-Recall | — | — | 2.9 | 3.4 | 7.7 | 6.2 | 7.4 | 9.8 | |
| mAP | Previously known | 0.7 | 57.6 | 52.7 | 33.1 | 50.6 | 53.6 | 53.3 | 54.8 | |
| Current Known | 35.2 | 34.0 | 26.0 | 30.5 | 27.5 | 33.5 | 23.7 | 35.4 | ||
| Both | 17.9 | 45.3 | 39.4 | 31.8 | 39.1 | 42.9 | 38.5 | 44.6 | ||
| T3 | U-Recall | — | — | 3.9 | 8.7 | 11.9 | 5.7 | 10.3 | 12.8 | |
| mAP | Previously known | 0.3 | 43.8 | 38.2 | 28.8 | 38.7 | 38.3 | 39.3 | 40.5 | |
| Current Known | 23.5 | 22.3 | 12.7 | 16.3 | 14.7 | 15.8 | 13.4 | 17.6 | ||
| Both | 8.0 | 36.6 | 29.7 | 24.6 | 30.7 | 30.8 | 30.7 | 32.1 | ||
| T4 | mAP | Previously known | 0.7 | 35.6 | 29.6 | 25.6 | 30.7 | 31.4 | 30.7 | 32.6 |
| Current Known | 20.1 | 19.5 | 12.4 | 15.9 | 14.4 | 17.1 | 12.9 | 18.3 | ||
| Both | 5.5 | 31.5 | 25.3 | 23.2 | 26.7 | 27.8 | 26.3 | 28.4 | ||
Tab. 3 Comparison experimental results of GDFN-OWOD under OWOD setting
| Ti | 指标 | Faster R-CNN | Faster R-CNN+Finetuning | ORE-EBUI[ | UC-OWOD[ | OCPL[ | OW-DETR[ | BSDP[ | GDFN-OWOD | |
|---|---|---|---|---|---|---|---|---|---|---|
| T1 | U-Recall | — | — | 4.9 | 2.4 | 8.3 | 7.5 | 8.3 | 9.4 | |
| mAP | Current Known | 60.3 | 60.3 | 56.0 | 50.7 | 56.6 | 59.2 | 56.2 | 61.2 | |
| T2 | U-Recall | — | — | 2.9 | 3.4 | 7.7 | 6.2 | 7.4 | 9.8 | |
| mAP | Previously known | 0.7 | 57.6 | 52.7 | 33.1 | 50.6 | 53.6 | 53.3 | 54.8 | |
| Current Known | 35.2 | 34.0 | 26.0 | 30.5 | 27.5 | 33.5 | 23.7 | 35.4 | ||
| Both | 17.9 | 45.3 | 39.4 | 31.8 | 39.1 | 42.9 | 38.5 | 44.6 | ||
| T3 | U-Recall | — | — | 3.9 | 8.7 | 11.9 | 5.7 | 10.3 | 12.8 | |
| mAP | Previously known | 0.3 | 43.8 | 38.2 | 28.8 | 38.7 | 38.3 | 39.3 | 40.5 | |
| Current Known | 23.5 | 22.3 | 12.7 | 16.3 | 14.7 | 15.8 | 13.4 | 17.6 | ||
| Both | 8.0 | 36.6 | 29.7 | 24.6 | 30.7 | 30.8 | 30.7 | 32.1 | ||
| T4 | mAP | Previously known | 0.7 | 35.6 | 29.6 | 25.6 | 30.7 | 31.4 | 30.7 | 32.6 |
| Current Known | 20.1 | 19.5 | 12.4 | 15.9 | 14.4 | 17.1 | 12.9 | 18.3 | ||
| Both | 5.5 | 31.5 | 25.3 | 23.2 | 26.7 | 27.8 | 26.3 | 28.4 | ||
| 模型 | T1 | T2 | T3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| U-Recall/% | WI | A-OSE | U-Recall/% | WI | A-OSE | U-Recall/% | WI | A-OSE | |
| ORE-EBUI[ | 4.9 | 0.062 1 | 10 459 | 2.9 | 0.028 2 | 10 445 | 3.9 | 0.021 1 | 7 990 |
| OW-DETR[ | 7.5 | 0.057 1 | 10 240 | 6.2 | 0.027 8 | 8 441 | 5.7 | 0.015 6 | 6 803 |
| OCPL[ | 8.3 | 0.041 3 | 5 670 | 7.6 | 0.022 0 | 5 690 | 11.9 | 0.016 2 | 5 166 |
| BSDP[ | 8.3 | 0.042 7 | 5 520 | 7.4 | 0.024 3 | 5 386 | 10.3 | 0.016 8 | 4 308 |
| GDFN-OWOD | 9.4 | 0.0306 | 3581 | 9.8 | 0.0211 | 3842 | 12.8 | 0.0153 | 3783 |
Tab. 4 Comparison experimental results of obfuscation of unknown subjects under OWOD settings
| 模型 | T1 | T2 | T3 | ||||||
|---|---|---|---|---|---|---|---|---|---|
| U-Recall/% | WI | A-OSE | U-Recall/% | WI | A-OSE | U-Recall/% | WI | A-OSE | |
| ORE-EBUI[ | 4.9 | 0.062 1 | 10 459 | 2.9 | 0.028 2 | 10 445 | 3.9 | 0.021 1 | 7 990 |
| OW-DETR[ | 7.5 | 0.057 1 | 10 240 | 6.2 | 0.027 8 | 8 441 | 5.7 | 0.015 6 | 6 803 |
| OCPL[ | 8.3 | 0.041 3 | 5 670 | 7.6 | 0.022 0 | 5 690 | 11.9 | 0.016 2 | 5 166 |
| BSDP[ | 8.3 | 0.042 7 | 5 520 | 7.4 | 0.024 3 | 5 386 | 10.3 | 0.016 8 | 4 308 |
| GDFN-OWOD | 9.4 | 0.0306 | 3581 | 9.8 | 0.0211 | 3842 | 12.8 | 0.0153 | 3783 |
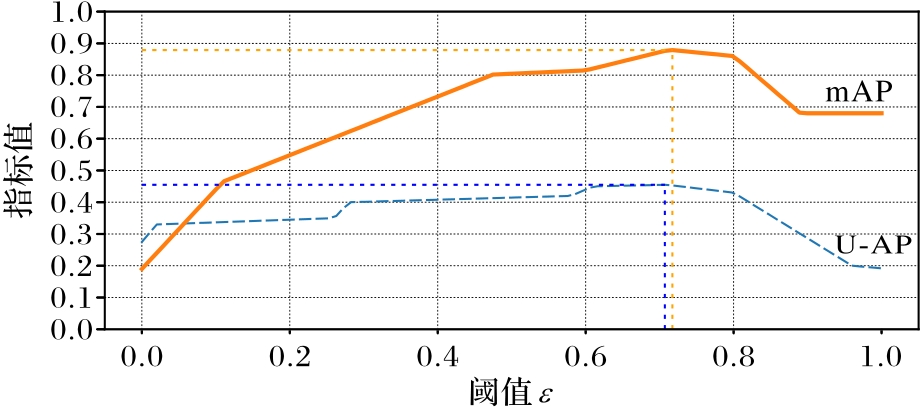
Fig. 2 Comparison experimental results of NCut threshold ε
| 网络架构 | 所选块名称 | 输出尺寸 | 深度 |
|---|---|---|---|
| ResNet50 | Block 4.2 | 2 048×7×7 | N-1 |
| VGG16 | Layer 13 | 512×14×14 | N |
| MobileNetV3 | Block 17 | 960×7×7 | N |
Tab. 5 Experimental results of algorithm 2
| 网络架构 | 所选块名称 | 输出尺寸 | 深度 |
|---|---|---|---|
| ResNet50 | Block 4.2 | 2 048×7×7 | N-1 |
| VGG16 | Layer 13 | 512×14×14 | N |
| MobileNetV3 | Block 17 | 960×7×7 | N |
| 模型 | RPC | 推理速度/(frame·s-1) |
|---|---|---|
| GDFN-OWOD-B+N | 16.92 | 8.21 |
| GDFN-OWOD | 4.95 | 13.86 |
Tab. 6 Comparison of region proposal count and reasoning speed
| 模型 | RPC | 推理速度/(frame·s-1) |
|---|---|---|
| GDFN-OWOD-B+N | 16.92 | 8.21 |
| GDFN-OWOD | 4.95 | 13.86 |
| 实验 | G | B | F | T1 | T2 | T3 | T4 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| U-Recall/% | mAP/% | A-OSE | U-Recall/% | mAP/% | A-OSE | U-Recall/% | mAP/% | A-OSE | mAP/% | ||||
| 对照组 | — | 60.5 | 10 459 | — | 17.9 | 10 440 | — | 8.0 | 7 990 | 5.5 | |||
| 实验1 | ✓ | ✓ | — | 60.3 | 8 955 | — | 18.9 | 9 792 | — | 12.5 | 7 245 | 12.8 | |
| 实验2 | ✓ | ✓ | 2.8 | 60.4 | 3 862 | 2.6 | 40.5 | 3 957 | 3.0 | 31.4 | 3 829 | 26.7 | |
| 实验3 | ✓ | ✓ | 9.4 | 61.1 | 3 580 | 9.8 | 44.6 | 3 824 | 12.8 | 32.1 | 3 782 | 28.4 | |
| 实验4 | ✓ | ✓ | ✓ | 9.4 | 61.2 | 3581 | 9.8 | 44.6 | 3842 | 12.8 | 32.1 | 3783 | 28.4 |
Tab. 7 Ablation experimental results
| 实验 | G | B | F | T1 | T2 | T3 | T4 | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| U-Recall/% | mAP/% | A-OSE | U-Recall/% | mAP/% | A-OSE | U-Recall/% | mAP/% | A-OSE | mAP/% | ||||
| 对照组 | — | 60.5 | 10 459 | — | 17.9 | 10 440 | — | 8.0 | 7 990 | 5.5 | |||
| 实验1 | ✓ | ✓ | — | 60.3 | 8 955 | — | 18.9 | 9 792 | — | 12.5 | 7 245 | 12.8 | |
| 实验2 | ✓ | ✓ | 2.8 | 60.4 | 3 862 | 2.6 | 40.5 | 3 957 | 3.0 | 31.4 | 3 829 | 26.7 | |
| 实验3 | ✓ | ✓ | 9.4 | 61.1 | 3 580 | 9.8 | 44.6 | 3 824 | 12.8 | 32.1 | 3 782 | 28.4 | |
| 实验4 | ✓ | ✓ | ✓ | 9.4 | 61.2 | 3581 | 9.8 | 44.6 | 3842 | 12.8 | 32.1 | 3783 | 28.4 |
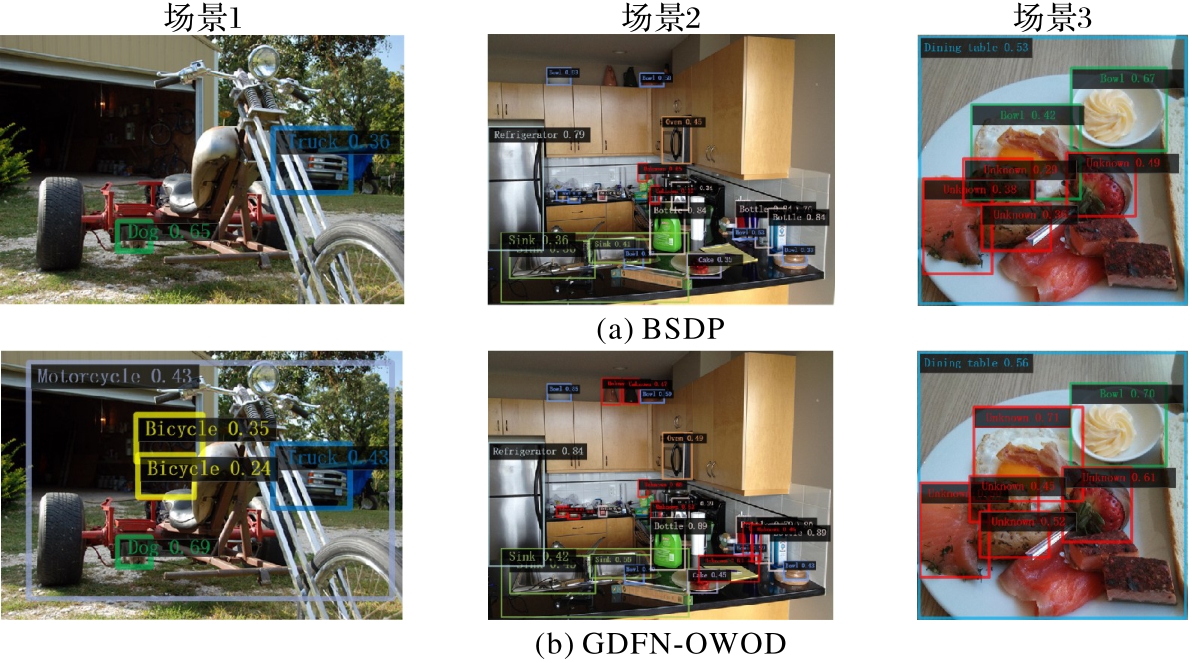
Fig. 3 Comparison of detection effects between BSDP and GDFN-OWOD
| [1] | 郭庆梅,刘宁波,王中训,等.基于深度学习的目标检测算法综述[J].探测与控制学报,2023, 45(6): 10-20. |
| GUO Q M, LIU N B, WANG Z X, et al. Review of deep learning based object detection algorithms [J]. Journal of Detection and Control, 2023, 45(6): 10-20. | |
| [2] | JOSEPH K J, KHAN S, KHAN F S, et al. Towards open world object detection [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 5826-5836. |
| [3] | GUPTA A, NARAYAN S, JOSEPH K J, et al. OW-DETR: open-world detection transformer [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 9225-9234. |
| [4] | MA S, WANG Y, WEI Y, et al. CAT: loCalization and identificAtion cascade detection Transformer for open-world object detection [C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 19681-19690. |
| [5] | ZOHAR O, WANG K C, YEUNG S. PROB: probabilistic objectness for open world object detection [C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition.Piscataway:IEEE, 2023: 11444-11453. |
| [6] | 田霖,李华,李林轩,等.基于特征解耦的开放世界目标检测[J].重庆理工大学学报(自然科学), 2023, 37(10): 166-173. |
| TIAN L, LI H, LI L X, et al. Open world object detection based on feature disentanglement [J]. Journal of Chongqing University of Technology (Natural Science), 2023, 37(10): 166-173. | |
| [7] | 谢斌红,张鹏举,张睿.结合Graph-FPN与稳健优化的开放世界目标检测[J].计算机科学与探索,2023, 17(12): 2954-2966. |
| XIE B H, ZHANG P J, ZHANG R. Open world object detection combining graph-FPN and robust optimization [J]. Journal of Frontiers of Computer Science and Technology, 2023, 17(12): 2954-2966. | |
| [8] | 谢斌红,唐彪,张睿. UBA-OWDT:一种新型的开放世界目标检测网络[J/OL].计算机工程与应用[2024-06-07]. . |
| XIE B H, TANG B, ZHANG R. UBA-OWDT: a novel network of open world object detection [J/OL]. Computer Engineering and Applications [2024-06-07]. . | |
| [9] | WU Z, LU Y, CHEN X, et al. UC-OWOD: unknown-classified open world object detection [C]// Proceedings of the 2022 European Conference on Computer Vision, LNCS 13670. Cham: Springer, 2022: 193-210. |
| [10] | ZEILER M D, FERGUS R. Visualizing and understanding convolutional networks [C]// Proceedings of the 2014 European Conference on Computer Vision, LNCS 8689. Cham: Springer, 2014: 818-833. |
| [11] | SPRINGENBERG J T, DOSOVITSKIY A, BROX T, et al. Striving for simplicity: the all convolutional net [EB/OL]. [2024-05-22]. . |
| [12] | GOODFELLOW I J, SHLENS J, SZEGEDY C. Explaining and harnessing adversarial examples [EB/OL]. [2024-05-22]. . |
| [13] | KURAKIN A, GOODFELLOW I, BENGIO S. Adversarial machine learning at scale [EB/OL]. [2024-05-22]. . |
| [14] | PERRONNIN F, DANCE C. Fisher kernels on visual vocabularies for image categorization [C]// Proceedings of the 2007 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2007: 1-8. |
| [15] | HENDRYCKS D, GIMPEL K. A baseline for detecting misclassified and out-of-distribution examples in neural networks [EB/OL]. [2024-05-22]. . |
| [16] | LIU W, WANG X, OWENS J D, et al. Energy-based out-of-distribution detection [EB/OL]. [2024-05-22]. . |
| [17] | KIM M, JAIN A K, LIU X. AdaFace: quality adaptive margin for face recognition [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 18729-18738. |
| [18] | DHAMIJA A R, GÜNTHER M, BOULT T E. Reducing network agnostophobia [C]// Proceedings of the 32nd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2018: 9175-9186. |
| [19] | YU J, MA L, LI Z, et al. Open-world object detection via discriminative class prototype learning [C]// Proceedings of the 2022 IEEE International Conference on Image Processing. Piscataway: IEEE, 2022: 626-630. |
| [20] | CHEN Y, MA L, JING L, et al. BSDP: brain-inspired streaming dual-level perturbations for online open world object detection [J]. Pattern Recognition, 2024, 152: No.110472. |
| [1] | Peng PENG, Ziting CAI, Wenling LIU, Caihua CHEN, Wei ZENG, Baolai HUANG. Speech emotion recognition method based on hybrid Siamese network with CNN and bidirectional GRU [J]. Journal of Computer Applications, 2025, 45(8): 2515-2521. |
| [2] | Jinhao LIN, Chuan LUO, Tianrui LI, Hongmei CHEN. Thoracic disease classification method based on cross-scale attention network [J]. Journal of Computer Applications, 2025, 45(8): 2712-2719. |
| [3] | Yongpeng TAO, Shiqi BAI, Zhengwen ZHOU. Neural architecture search for multi-tissue segmentation using convolutional and transformer-based networks in glioma segmentation [J]. Journal of Computer Applications, 2025, 45(7): 2378-2386. |
| [4] | Dan WANG, Wenhao ZHANG, Lijuan PENG. Channel estimation of reconfigurable intelligent surface assisted communication system based on deep learning [J]. Journal of Computer Applications, 2025, 45(5): 1613-1618. |
| [5] | Baohua YUAN, Jialu CHEN, Huan WANG. Medical image segmentation network integrating multi-scale semantics and parallel double-branch [J]. Journal of Computer Applications, 2025, 45(3): 988-995. |
| [6] | Dixin WANG, Jiahao WANG, Min LI, Hao CHEN, Guangyao HU, Yu GONG. Abnormal attack detection for underwater acoustic communication network [J]. Journal of Computer Applications, 2025, 45(2): 526-533. |
| [7] | Xinran XU, Shaobing ZHANG, Miao CHENG, Yang ZHANG, Shang ZENG. Bearings fault diagnosis method based on multi-pathed hierarchical mixture-of-experts model [J]. Journal of Computer Applications, 2025, 45(1): 59-68. |
| [8] | Yun LI, Fuyou WANG, Peiguang JING, Su WANG, Ao XIAO. Uncertainty-based frame associated short video event detection method [J]. Journal of Computer Applications, 2024, 44(9): 2903-2910. |
| [9] | Hong CHEN, Bing QI, Haibo JIN, Cong WU, Li’ang ZHANG. Class-imbalanced traffic abnormal detection based on 1D-CNN and BiGRU [J]. Journal of Computer Applications, 2024, 44(8): 2493-2499. |
| [10] | Dongwei WANG, Baichen LIU, Zhi HAN, Yanmei WANG, Yandong TANG. Deep network compression method based on low-rank decomposition and vector quantization [J]. Journal of Computer Applications, 2024, 44(7): 1987-1994. |
| [11] | Yangyi GAO, Tao LEI, Xiaogang DU, Suiyong LI, Yingbo WANG, Chongdan MIN. Crowd counting and locating method based on pixel distance map and four-dimensional dynamic convolutional network [J]. Journal of Computer Applications, 2024, 44(7): 2233-2242. |
| [12] | Mengyuan HUANG, Kan CHANG, Mingyang LING, Xinjie WEI, Tuanfa QIN. Progressive enhancement algorithm for low-light images based on layer guidance [J]. Journal of Computer Applications, 2024, 44(6): 1911-1919. |
| [13] | Jianjing LI, Guanfeng LI, Feizhou QIN, Weijun LI. Multi-relation approximate reasoning model based on uncertain knowledge graph embedding [J]. Journal of Computer Applications, 2024, 44(6): 1751-1759. |
| [14] | Min SUN, Qian CHENG, Xining DING. CBAM-CGRU-SVM based malware detection method for Android [J]. Journal of Computer Applications, 2024, 44(5): 1539-1545. |
| [15] | Wenshuo GAO, Xiaoyun CHEN. Point cloud classification network based on node structure [J]. Journal of Computer Applications, 2024, 44(5): 1471-1478. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||