


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (11): 3573-3582.DOI: 10.11772/j.issn.1001-9081.2024111625
• Artificial intelligence • Previous Articles
Mengnan XU1, Hailiang YE1, Feilong CAO2( )
)
Received:2024-11-18
Revised:2025-03-25
Accepted:2025-04-16
Online:2025-04-22
Published:2025-11-10
Contact:
Feilong CAO
About author:XU Mengnan, born in 1997, M. S. Her research interests include deep learning, graph neural network, point cloud registration.Supported by:
徐梦楠1, 叶海良1, 曹飞龙2()
通讯作者:
曹飞龙
作者简介:徐梦楠(1997—),女,浙江杭州人,硕士,主要研究方向:深度学习、图神经网络、点云配准基金资助:CLC Number:
Mengnan XU, Hailiang YE, Feilong CAO. Neighborhood-attention and topology-aware graph convolution method for robust point cloud registration[J]. Journal of Computer Applications, 2025, 45(11): 3573-3582.
徐梦楠, 叶海良, 曹飞龙. 面向鲁棒点云配准的邻域关注和拓扑感知的图卷积方法[J]. 《计算机应用》唯一官方网站, 2025, 45(11): 3573-3582.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024111625
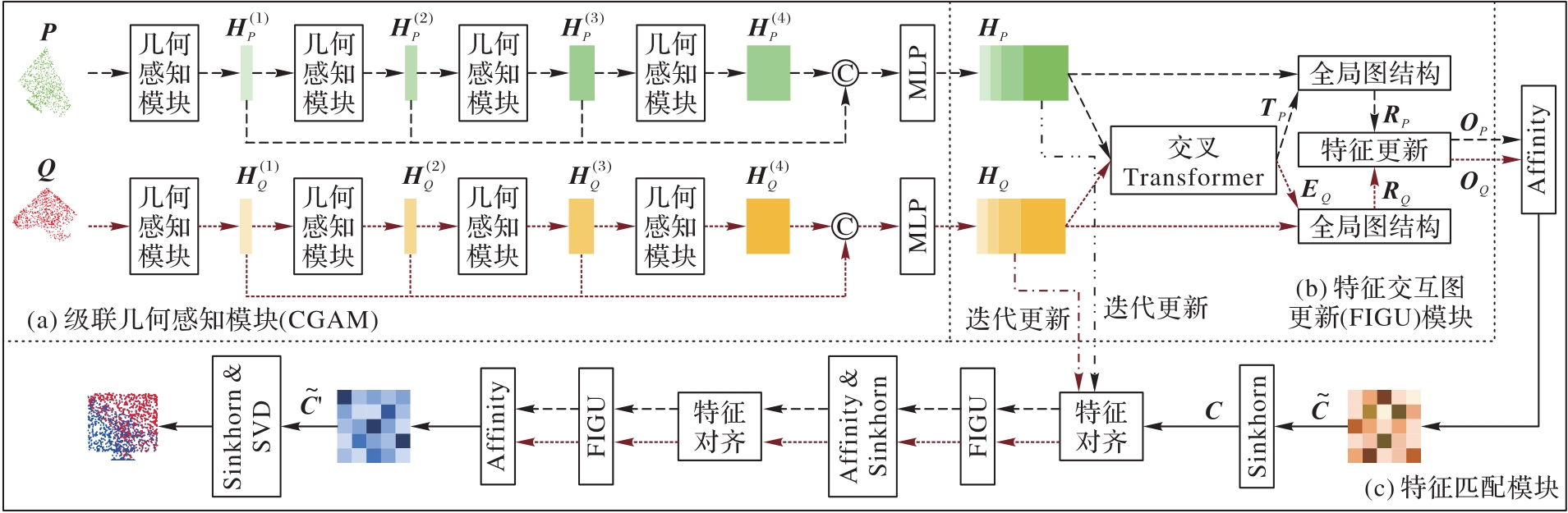
Fig.1 NATA model framework
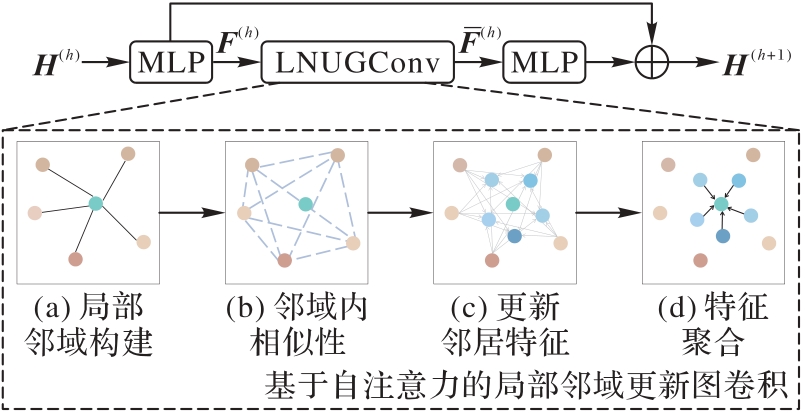
Fig.2 Geometry-aware module
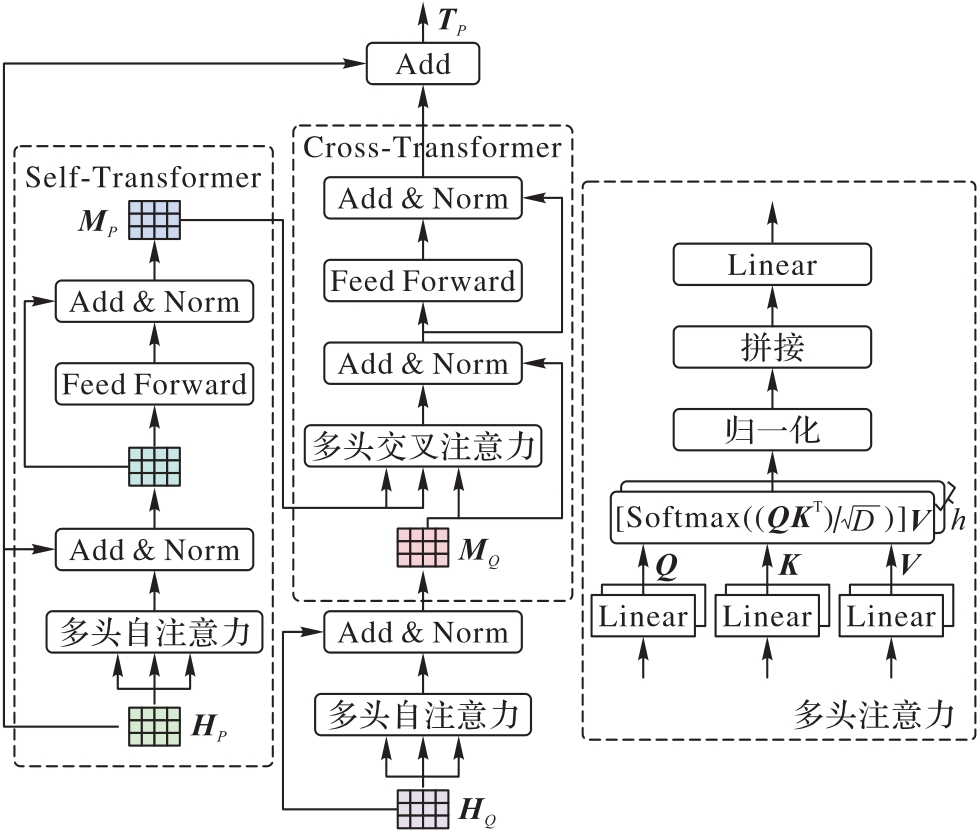
Fig.3 Flow of Transformer module
| 网络层 | 设置 | 输入维度 | 输出维度 |
|---|---|---|---|
| 输入层 | 3D点坐标 | — | |
| CGAM | GAM-1{ | ||
| GAM-2{ | |||
| GAM-3{ | |||
| GAM-4{ | |||
| 整合层 | |||
| FIGU | Transformer模块 | ||
| 全局图结构 | |||
| 特征更新 | |||
| 特征对齐 | |||
估计 变换 | SVD |
Tab. 1 Implementation details of NATA
| 网络层 | 设置 | 输入维度 | 输出维度 |
|---|---|---|---|
| 输入层 | 3D点坐标 | — | |
| CGAM | GAM-1{ | ||
| GAM-2{ | |||
| GAM-3{ | |||
| GAM-4{ | |||
| 整合层 | |||
| FIGU | Transformer模块 | ||
| 全局图结构 | |||
| 特征更新 | |||
| 特征对齐 | |||
估计 变换 | SVD |
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 2.391 3 | 0.005 9 | 4.645 4 | 0.011 7 | 3.720 4 | 0.008 4 | 3.000 8 | 0.012 2 | 5.903 5 | 0.024 2 | 4.820 9 | 0.017 1 |
| IDAM+GNN[ | 1.878 8 | 0.011 3 | 3.690 7 | 0.022 7 | 4.249 7 | 0.019 5 | 1.807 8 | 0.011 2 | 3.502 3 | 0.022 4 | 3.462 6 | 0.018 7 |
| RPMNet[ | 0.305 1 | 0.002 8 | 0.583 6 | 0.005 8 | 0.843 0 | 0.006 4 | 0.306 3 | 0.002 7 | 0.583 7 | 0.005 5 | 0.834 3 | 0.004 5 |
| DeepBBS[ | 0.291 1 | 0.572 3 | 0.001 1 | 2.137 5 | 0.514 0 | 0.000 7 | 1.054 5 | 0.001 5 | 3.265 1 | 0.004 4 | ||
| PREDATOR[ | 0.880 4 | 0.007 6 | 1.729 3 | 0.015 7 | 2.152 8 | 0.014 8 | 0.798 2 | 0.007 2 | 1.505 6 | 0.014 7 | 1.569 4 | 0.012 8 |
| REGTR[ | 0.458 0 | 0.003 5 | 0.913 0 | 0.007 5 | 1.547 5 | 0.010 5 | 0.633 6 | 0.004 4 | 1.259 3 | 0.009 4 | 2.620 7 | 0.014 7 |
| FINet[ | 2.616 1 | 0.028 8 | 4.992 6 | 0.058 2 | 3.929 8 | 0.038 5 | 0.993 1 | 0.009 5 | 2.034 3 | 0.020 0 | 2.818 2 | 0.020 4 |
| RGM[ | 0.077 2 | 0.000 7 | 0.143 7 | 0.341 1 | 0.001 9 | 0.079 6 | 0.000 7 | 0.145 4 | 0.001 4 | 0.305 7 | 0.002 6 | |
| GeoTransformer[ | 0.375 1 | 0.004 3 | 0.739 2 | 0.008 4 | 0.437 1 | 0.004 2 | 0.320 4 | 0.003 1 | 0.632 4 | 0.007 2 | 0.376 1 | 0.004 3 |
| LFGNet[ | 0.084 8 | 0.000 7 | 0.157 2 | 0.361 1 | 0.002 7 | 0.073 4 | 0.135 9 | 0.001 3 | 0.290 8 | 0.001 7 | ||
| GMCNet[ | 0.087 5 | 0.000 8 | 0.166 0 | 0.001 6 | 0.001 3 | 0.088 8 | 0.003 1 | 0.164 4 | 0.001 6 | |||
| IFNet[ | 0.171 3 | 0.000 7 | 0.376 4 | 1.905 5 | 0.005 9 | 0.195 2 | 0.001 0 | 0.420 0 | 0.002 0 | 1.714 9 | 0.007 6 | |
| SharpGConv[ | 0.318 5 | 0.002 5 | 0.244 0 | 0.001 6 | ||||||||
| NATA | 0.061 9 | 0.000 5 | 0.113 9 | 0.001 1 | 0.096 1 | 0.000 8 | 0.056 1 | 0.000 5 | 0.100 8 | 0.001 1 | 0.077 5 | 0.000 7 |
Tab. 2 Registration performance of complete-to-complete noisy point clouds with unknown shapes and unknown categories
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 2.391 3 | 0.005 9 | 4.645 4 | 0.011 7 | 3.720 4 | 0.008 4 | 3.000 8 | 0.012 2 | 5.903 5 | 0.024 2 | 4.820 9 | 0.017 1 |
| IDAM+GNN[ | 1.878 8 | 0.011 3 | 3.690 7 | 0.022 7 | 4.249 7 | 0.019 5 | 1.807 8 | 0.011 2 | 3.502 3 | 0.022 4 | 3.462 6 | 0.018 7 |
| RPMNet[ | 0.305 1 | 0.002 8 | 0.583 6 | 0.005 8 | 0.843 0 | 0.006 4 | 0.306 3 | 0.002 7 | 0.583 7 | 0.005 5 | 0.834 3 | 0.004 5 |
| DeepBBS[ | 0.291 1 | 0.572 3 | 0.001 1 | 2.137 5 | 0.514 0 | 0.000 7 | 1.054 5 | 0.001 5 | 3.265 1 | 0.004 4 | ||
| PREDATOR[ | 0.880 4 | 0.007 6 | 1.729 3 | 0.015 7 | 2.152 8 | 0.014 8 | 0.798 2 | 0.007 2 | 1.505 6 | 0.014 7 | 1.569 4 | 0.012 8 |
| REGTR[ | 0.458 0 | 0.003 5 | 0.913 0 | 0.007 5 | 1.547 5 | 0.010 5 | 0.633 6 | 0.004 4 | 1.259 3 | 0.009 4 | 2.620 7 | 0.014 7 |
| FINet[ | 2.616 1 | 0.028 8 | 4.992 6 | 0.058 2 | 3.929 8 | 0.038 5 | 0.993 1 | 0.009 5 | 2.034 3 | 0.020 0 | 2.818 2 | 0.020 4 |
| RGM[ | 0.077 2 | 0.000 7 | 0.143 7 | 0.341 1 | 0.001 9 | 0.079 6 | 0.000 7 | 0.145 4 | 0.001 4 | 0.305 7 | 0.002 6 | |
| GeoTransformer[ | 0.375 1 | 0.004 3 | 0.739 2 | 0.008 4 | 0.437 1 | 0.004 2 | 0.320 4 | 0.003 1 | 0.632 4 | 0.007 2 | 0.376 1 | 0.004 3 |
| LFGNet[ | 0.084 8 | 0.000 7 | 0.157 2 | 0.361 1 | 0.002 7 | 0.073 4 | 0.135 9 | 0.001 3 | 0.290 8 | 0.001 7 | ||
| GMCNet[ | 0.087 5 | 0.000 8 | 0.166 0 | 0.001 6 | 0.001 3 | 0.088 8 | 0.003 1 | 0.164 4 | 0.001 6 | |||
| IFNet[ | 0.171 3 | 0.000 7 | 0.376 4 | 1.905 5 | 0.005 9 | 0.195 2 | 0.001 0 | 0.420 0 | 0.002 0 | 1.714 9 | 0.007 6 | |
| SharpGConv[ | 0.318 5 | 0.002 5 | 0.244 0 | 0.001 6 | ||||||||
| NATA | 0.061 9 | 0.000 5 | 0.113 9 | 0.001 1 | 0.096 1 | 0.000 8 | 0.056 1 | 0.000 5 | 0.100 8 | 0.001 1 | 0.077 5 | 0.000 7 |
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 5.012 9 | 0.060 8 | 9.653 2 | 0.121 2 | 6.861 4 | 0.078 7 | 6.376 3 | 0.066 7 | 12.525 7 | 0.122 0 | 8.627 8 | 0.085 2 |
| IDAM+GNN[ | 6.238 8 | 0.067 5 | 12.140 0 | 0.134 2 | 10.081 2 | 0.104 9 | 6.293 3 | 0.082 7 | 12.120 3 | 0.163 2 | 10.169 9 | 0.119 4 |
| RPMNet[ | 0.769 3 | 0.007 0 | 1.508 7 | 0.014 9 | 1.915 3 | 0.014 9 | 0.820 4 | 0.007 9 | 1.572 4 | 0.016 7 | 1.956 1 | 0.017 5 |
| DeepBBS[ | 1.556 3 | 0.016 4 | 3.140 9 | 0.032 7 | 5.111 0 | 0.044 7 | 2.285 8 | 0.024 8 | 4.513 3 | 0.049 3 | 7.984 4 | 0.061 7 |
| PREDATOR[ | 1.027 1 | 0.008 8 | 1.976 9 | 0.018 1 | 2.397 9 | 0.019 9 | 1.024 6 | 0.009 9 | 1.934 5 | 0.020 6 | 3.431 7 | 0.027 0 |
| REGTR[ | 0.809 4 | 0.006 3 | 1.601 3 | 0.013 3 | 2.132 1 | 0.015 4 | 0.931 0 | 0.008 1 | 1.795 9 | 0.017 1 | 2.292 2 | 0.020 6 |
| FINet[ | 2.800 4 | 0.027 8 | 5.424 9 | 0.058 5 | 4.645 0 | 0.046 8 | 3.733 3 | 0.040 6 | 7.206 8 | 0.085 3 | 5.740 0 | 0.063 2 |
| RGM[ | 0.539 5 | 0.004 2 | 1.056 4 | 0.009 0 | 3.928 2 | 0.020 7 | 0.915 5 | 0.007 1 | 1.683 1 | 0.014 7 | 4.086 4 | 0.030 1 |
| GeoTransformer[ | 0.781 1 | 0.008 4 | 1.541 0 | 0.018 3 | 0.725 2 | 0.008 1 | 1.435 0 | 0.018 1 | 0.010 3 | |||
| LFGNet[ | 0.370 6 | 0.003 3 | 0.695 1 | 0.006 9 | 1.251 7 | 0.011 9 | 0.700 2 | 0.006 3 | 1.327 7 | 0.012 3 | 2.352 1 | 0.022 9 |
| GMCNet[ | 1.609 3 | 0.013 2 | 3.003 2 | 0.027 1 | 5.034 9 | 0.034 5 | 1.784 3 | 0.014 7 | 3.390 0 | 0.030 3 | 5.613 9 | 0.042 8 |
| IFNet[ | 4.089 3 | 0.029 3 | 7.976 0 | 0.058 0 | 9.227 8 | 0.045 2 | 3.895 5 | 0.030 2 | 7.528 5 | 0.059 5 | 8.765 8 | 0.046 3 |
| SharpGConv[ | 2.884 6 | 0.015 6 | 1.351 9 | |||||||||
| NATA | 0.157 2 | 0.001 4 | 0.293 1 | 0.002 8 | 0.301 6 | 0.002 6 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
Tab. 3 Registration performance of partial-to-partial noisy point clouds with unknown shapes and unknown categories
| 方法 | 未知形状 | 未知类别 | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| MAE | MIE | RMSE | MAE | MIE | RMSE | |||||||
| R | t | R | t | R | t | R | t | R | t | R | t | |
| DCP-v2[ | 5.012 9 | 0.060 8 | 9.653 2 | 0.121 2 | 6.861 4 | 0.078 7 | 6.376 3 | 0.066 7 | 12.525 7 | 0.122 0 | 8.627 8 | 0.085 2 |
| IDAM+GNN[ | 6.238 8 | 0.067 5 | 12.140 0 | 0.134 2 | 10.081 2 | 0.104 9 | 6.293 3 | 0.082 7 | 12.120 3 | 0.163 2 | 10.169 9 | 0.119 4 |
| RPMNet[ | 0.769 3 | 0.007 0 | 1.508 7 | 0.014 9 | 1.915 3 | 0.014 9 | 0.820 4 | 0.007 9 | 1.572 4 | 0.016 7 | 1.956 1 | 0.017 5 |
| DeepBBS[ | 1.556 3 | 0.016 4 | 3.140 9 | 0.032 7 | 5.111 0 | 0.044 7 | 2.285 8 | 0.024 8 | 4.513 3 | 0.049 3 | 7.984 4 | 0.061 7 |
| PREDATOR[ | 1.027 1 | 0.008 8 | 1.976 9 | 0.018 1 | 2.397 9 | 0.019 9 | 1.024 6 | 0.009 9 | 1.934 5 | 0.020 6 | 3.431 7 | 0.027 0 |
| REGTR[ | 0.809 4 | 0.006 3 | 1.601 3 | 0.013 3 | 2.132 1 | 0.015 4 | 0.931 0 | 0.008 1 | 1.795 9 | 0.017 1 | 2.292 2 | 0.020 6 |
| FINet[ | 2.800 4 | 0.027 8 | 5.424 9 | 0.058 5 | 4.645 0 | 0.046 8 | 3.733 3 | 0.040 6 | 7.206 8 | 0.085 3 | 5.740 0 | 0.063 2 |
| RGM[ | 0.539 5 | 0.004 2 | 1.056 4 | 0.009 0 | 3.928 2 | 0.020 7 | 0.915 5 | 0.007 1 | 1.683 1 | 0.014 7 | 4.086 4 | 0.030 1 |
| GeoTransformer[ | 0.781 1 | 0.008 4 | 1.541 0 | 0.018 3 | 0.725 2 | 0.008 1 | 1.435 0 | 0.018 1 | 0.010 3 | |||
| LFGNet[ | 0.370 6 | 0.003 3 | 0.695 1 | 0.006 9 | 1.251 7 | 0.011 9 | 0.700 2 | 0.006 3 | 1.327 7 | 0.012 3 | 2.352 1 | 0.022 9 |
| GMCNet[ | 1.609 3 | 0.013 2 | 3.003 2 | 0.027 1 | 5.034 9 | 0.034 5 | 1.784 3 | 0.014 7 | 3.390 0 | 0.030 3 | 5.613 9 | 0.042 8 |
| IFNet[ | 4.089 3 | 0.029 3 | 7.976 0 | 0.058 0 | 9.227 8 | 0.045 2 | 3.895 5 | 0.030 2 | 7.528 5 | 0.059 5 | 8.765 8 | 0.046 3 |
| SharpGConv[ | 2.884 6 | 0.015 6 | 1.351 9 | |||||||||
| NATA | 0.157 2 | 0.001 4 | 0.293 1 | 0.002 8 | 0.301 6 | 0.002 6 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |

Fig. 4 Registration visualization realized on ModelNet40 dataset
| K | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 10 | 0.317 9 | 0.002 3 | 0.531 0 | 0.004 6 | 3.815 7 | 0.017 4 |
| 20 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 30 | 0.160 6 | 0.001 6 | 0.309 8 | 0.003 4 | 0.676 7 | 0.009 4 |
Tab. 4 Discussion of number of nearest neighbors K
| K | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 10 | 0.317 9 | 0.002 3 | 0.531 0 | 0.004 6 | 3.815 7 | 0.017 4 |
| 20 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 30 | 0.160 6 | 0.001 6 | 0.309 8 | 0.003 4 | 0.676 7 | 0.009 4 |
| L | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 1 | 0.670 3 | 0.006 4 | 1.268 3 | 0.013 6 | 2.034 6 | 0.022 4 |
| 2 | 0.167 2 | 0.001 8 | 0.313 8 | 0.003 6 | 0.518 3 | 0.010 1 |
| 3 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 4 | 0.156 3 | 0.001 6 | 0.290 7 | 0.003 2 | 0.613 0 | 0.009 0 |
Tab. 5 Discussion of number of FIGU module iterations L
| L | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|
| R | t | R | t | R | t | |
| 1 | 0.670 3 | 0.006 4 | 1.268 3 | 0.013 6 | 2.034 6 | 0.022 4 |
| 2 | 0.167 2 | 0.001 8 | 0.313 8 | 0.003 6 | 0.518 3 | 0.010 1 |
| 3 | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 4 | 0.156 3 | 0.001 6 | 0.290 7 | 0.003 2 | 0.613 0 | 0.009 0 |
| 方法 | 模块 | MAE | MIE | RMSE | |||||
|---|---|---|---|---|---|---|---|---|---|
| BL | CGAM | FIGU | R | t | R | t | R | t | |
| 1 | √ | 2.635 6 | 0.026 9 | 5.124 6 | 0.056 8 | 5.808 1 | 0.060 1 | ||
| 2 | √ | √ | 0.552 1 | 0.004 6 | 1.019 1 | 0.009 5 | 3.238 4 | 0.028 7 | |
| 3 | √ | √ | 0.574 0 | 0.004 8 | 1.079 5 | 0.009 9 | 2.147 2 | 0.016 2 | |
| 4 | √ | √ | √ | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
Tab. 6 Ablation experimental results of NATA on ModelNet40 dataset
| 方法 | 模块 | MAE | MIE | RMSE | |||||
|---|---|---|---|---|---|---|---|---|---|
| BL | CGAM | FIGU | R | t | R | t | R | t | |
| 1 | √ | 2.635 6 | 0.026 9 | 5.124 6 | 0.056 8 | 5.808 1 | 0.060 1 | ||
| 2 | √ | √ | 0.552 1 | 0.004 6 | 1.019 1 | 0.009 5 | 3.238 4 | 0.028 7 | |
| 3 | √ | √ | 0.574 0 | 0.004 8 | 1.079 5 | 0.009 9 | 2.147 2 | 0.016 2 | |
| 4 | √ | √ | √ | 0.154 4 | 0.001 6 | 0.288 0 | 0.003 3 | 0.339 1 | 0.011 0 |
| 数据集 | 方法 | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|---|
| R | t | R | t | R | t | ||
| FAUST | DCP-v2[ | 9.206 5 | 0.085 5 | 18.682 5 | 0.168 7 | 12.339 6 | 0.108 4 |
| IDAM+GNN[ | 7.960 1 | 0.104 8 | 15.070 1 | 0.204 8 | 11.120 0 | 0.148 9 | |
| RPMNet[ | 3.877 2 | 0.025 5 | 7.575 7 | 0.049 9 | 5.812 6 | 0.036 7 | |
| DeepBBS[ | 5.226 7 | 0.046 1 | 9.794 6 | 0.091 6 | 13.630 2 | 0.089 5 | |
| PREDATOR[ | 1.939 1 | 0.017 3 | 3.624 3 | 0.036 2 | 3.860 4 | 0.049 3 | |
| REGTR[ | 0.714 3 | 0.005 8 | 1.367 3 | 0.011 7 | 0.982 6 | 0.007 9 | |
| FINet[ | 3.570 9 | 0.033 2 | 6.994 9 | 0.068 6 | 5.345 2 | 0.047 5 | |
| RGM[ | 1.135 6 | 0.008 5 | 2.184 9 | 0.016 7 | 3.174 6 | 0.023 3 | |
| GeoTransformer[ | 0.445 5 | 0.004 2 | 0.878 4 | 0.009 6 | 0.520 0 | 0.005 0 | |
| LFGNet[ | 1.411 4 | 0.010 2 | 2.682 0 | 0.020 9 | 5.801 9 | 0.045 6 | |
| GMCNet[ | 1.251 7 | 0.008 8 | 2.342 9 | 0.017 8 | 2.062 4 | 0.015 9 | |
| IFNet[ | 3.100 7 | 0.117 0 | 4.209 5 | 0.235 9 | 5.497 1 | 0.168 7 | |
| SharpGConv[ | 0.102 4 | 0.000 8 | 0.190 2 | 0.001 7 | 0.139 8 | 0.001 1 | |
| NATA | |||||||
| ShapeNet Parts | DCP-v2[ | 9.128 2 | 0.084 7 | 18.078 4 | 0.169 3 | 13.215 7 | 0.108 4 |
| IDAM+GNN[ | 7.698 5 | 0.081 3 | 14.701 6 | 0.162 6 | 12.521 8 | 0.117 6 | |
| RPMNet[ | 3.950 5 | 0.026 4 | 5.778 3 | 0.052 7 | 5.575 4 | 0.042 0 | |
| DeepBBS[ | 4.384 1 | 0.041 2 | 8.568 2 | 0.082 4 | 13.792 4 | 0.085 7 | |
| PREDATOR[ | 1.268 2 | 0.009 2 | 2.555 3 | 0.018 3 | 3.930 1 | 0.035 4 | |
| REGTR[ | 0.601 7 | 0.005 1 | 1.188 1 | 0.010 6 | 1.816 3 | 0.012 3 | |
| FINet[ | 3.501 4 | 0.033 0 | 6.854 5 | 0.068 0 | 5.233 4 | 0.047 4 | |
| RGM[ | 1.835 1 | 0.014 5 | 3.540 2 | 0.031 2 | 8.090 0 | 0.050 6 | |
| GeoTransformer[ | 0.566 2 | 0.005 4 | 1.095 5 | 0.011 3 | |||
| LFGNet[ | 1.211 9 | 0.009 9 | 2.312 1 | 0.021 3 | 4.423 2 | 0.036 3 | |
| GMCNet[ | 2.446 8 | 0.019 5 | 4.840 4 | 0.040 5 | 8.195 4 | 0.057 6 | |
| IFNet[ | 1.600 7 | 0.011 2 | 3.048 5 | 0.022 1 | 6.932 3 | 0.033 5 | |
| SharpGConv[ | 1.337 4 | 0.009 8 | |||||
| NATA | 0.170 3 | 0.001 5 | 0.319 6 | 0.003 1 | 0.351 1 | 0.005 0 | |
Tab. 7 General issues on unknown datasets
| 数据集 | 方法 | MAE | MIE | RMSE | |||
|---|---|---|---|---|---|---|---|
| R | t | R | t | R | t | ||
| FAUST | DCP-v2[ | 9.206 5 | 0.085 5 | 18.682 5 | 0.168 7 | 12.339 6 | 0.108 4 |
| IDAM+GNN[ | 7.960 1 | 0.104 8 | 15.070 1 | 0.204 8 | 11.120 0 | 0.148 9 | |
| RPMNet[ | 3.877 2 | 0.025 5 | 7.575 7 | 0.049 9 | 5.812 6 | 0.036 7 | |
| DeepBBS[ | 5.226 7 | 0.046 1 | 9.794 6 | 0.091 6 | 13.630 2 | 0.089 5 | |
| PREDATOR[ | 1.939 1 | 0.017 3 | 3.624 3 | 0.036 2 | 3.860 4 | 0.049 3 | |
| REGTR[ | 0.714 3 | 0.005 8 | 1.367 3 | 0.011 7 | 0.982 6 | 0.007 9 | |
| FINet[ | 3.570 9 | 0.033 2 | 6.994 9 | 0.068 6 | 5.345 2 | 0.047 5 | |
| RGM[ | 1.135 6 | 0.008 5 | 2.184 9 | 0.016 7 | 3.174 6 | 0.023 3 | |
| GeoTransformer[ | 0.445 5 | 0.004 2 | 0.878 4 | 0.009 6 | 0.520 0 | 0.005 0 | |
| LFGNet[ | 1.411 4 | 0.010 2 | 2.682 0 | 0.020 9 | 5.801 9 | 0.045 6 | |
| GMCNet[ | 1.251 7 | 0.008 8 | 2.342 9 | 0.017 8 | 2.062 4 | 0.015 9 | |
| IFNet[ | 3.100 7 | 0.117 0 | 4.209 5 | 0.235 9 | 5.497 1 | 0.168 7 | |
| SharpGConv[ | 0.102 4 | 0.000 8 | 0.190 2 | 0.001 7 | 0.139 8 | 0.001 1 | |
| NATA | |||||||
| ShapeNet Parts | DCP-v2[ | 9.128 2 | 0.084 7 | 18.078 4 | 0.169 3 | 13.215 7 | 0.108 4 |
| IDAM+GNN[ | 7.698 5 | 0.081 3 | 14.701 6 | 0.162 6 | 12.521 8 | 0.117 6 | |
| RPMNet[ | 3.950 5 | 0.026 4 | 5.778 3 | 0.052 7 | 5.575 4 | 0.042 0 | |
| DeepBBS[ | 4.384 1 | 0.041 2 | 8.568 2 | 0.082 4 | 13.792 4 | 0.085 7 | |
| PREDATOR[ | 1.268 2 | 0.009 2 | 2.555 3 | 0.018 3 | 3.930 1 | 0.035 4 | |
| REGTR[ | 0.601 7 | 0.005 1 | 1.188 1 | 0.010 6 | 1.816 3 | 0.012 3 | |
| FINet[ | 3.501 4 | 0.033 0 | 6.854 5 | 0.068 0 | 5.233 4 | 0.047 4 | |
| RGM[ | 1.835 1 | 0.014 5 | 3.540 2 | 0.031 2 | 8.090 0 | 0.050 6 | |
| GeoTransformer[ | 0.566 2 | 0.005 4 | 1.095 5 | 0.011 3 | |||
| LFGNet[ | 1.211 9 | 0.009 9 | 2.312 1 | 0.021 3 | 4.423 2 | 0.036 3 | |
| GMCNet[ | 2.446 8 | 0.019 5 | 4.840 4 | 0.040 5 | 8.195 4 | 0.057 6 | |
| IFNet[ | 1.600 7 | 0.011 2 | 3.048 5 | 0.022 1 | 6.932 3 | 0.033 5 | |
| SharpGConv[ | 1.337 4 | 0.009 8 | |||||
| NATA | 0.170 3 | 0.001 5 | 0.319 6 | 0.003 1 | 0.351 1 | 0.005 0 | |
| [1] | ZHENG Y, LI Y, YANG S, et al. Global-PBNet: a novel point cloud registration for autonomous driving[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(11): 22312-22319. |
| [2] | HUANG Z, WEN Y, WANG Z, et al. Surface reconstruction from point clouds: a survey and a benchmark[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(12): 9727-9748. |
| [3] | ZHENG C, WU W, CHEN C, et al. Deep learning-based human pose estimation: a survey[J]. ACM Computing Surveys, 2024, 56(1): No.11. |
| [4] | DANG Z, WANG L, GUO Y, et al. Match normalization: learning-based point cloud registration for 6D object pose estimation in the real world[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2024, 46(6): 4489-4503. |
| [5] | PLACED J A, STRADER J, CARRILLO H, et al. A survey on active simultaneous localization and mapping: state of the art and new frontiers[J]. IEEE Transactions on Robotics, 2023, 39(3): 1686-1705. |
| [6] | BESI P J, McKAY N D. A method for registration of 3-D shapes[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 1992, 14(2): 239-256. |
| [7] | FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| [8] | WANG Y, SOLOMON J. PRNet: self-supervised learning for partial-to-partial registration[C]// Proceedings of the 33rd International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2019: 8814-8826. |
| [9] | ZHANG X, YANG J, ZHANG S, et al. 3D registration with maximal cliques[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 17745-17754. |
| [10] | XU J, HUANG Y, WAN Z, et al. GLORN: strong generalization fully convolutional network for low-overlap point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: No.5704814. |
| [11] | WANG Y, YAN C, FENG Y, et al. STORM: structure-based overlap matching for partial point cloud registration[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(1): 1135-1149. |
| [12] | GUO L, CHEN Z, CHENG S, et al. Learning compact and overlap-biased interactions for point cloud registration[J]. Neurocomputing, 2024, 598: No.127949. |
| [13] | YUAN Y, WU Y, FAN X, et al. EGST: enhanced geometric structure Transformer for point cloud registration[J]. IEEE Transactions on Visualization and Computer Graphics, 2024, 30(9): 6222-6234. |
| [14] | WANG Y, ZHOU P, GENG G, et al. CCAG: end-to-end point cloud registration[J]. IEEE Robotics and Automation Letters, 2024, 9(1): 435-442. |
| [15] | LV C, LIN W, ZHAO B. KSS-ICP: point cloud registration based on Kendall shape space[J]. IEEE Transactions on Image Processing, 2023, 32: 1681-1693. |
| [16] | HE L, WANG S, HU Q, et al. GFOICP: geometric feature optimized iterative closest point for 3-D point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2023, 61: No.5704217. |
| [17] | AIGER D, MITRA N J, COHEN-OR D. 4-points congruent sets for robust pairwise surface registration[J]. ACM Transactions on Graphics, 2008, 27(3): 1-10. |
| [18] | CHEN H, CHEN B, ZHAO Z, et al. Point cloud registration based on learning Gaussian mixture models with global-weighted local representations[J]. IEEE Geoscience and Remote Sensing Letters, 2023, 20: No.6500505. |
| [19] | AOKI Y, GOFORTH H, SRIVATSAN R A, et al. PointNetLK: robust & efficient point cloud registration using PointNet[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 7156-7165. |
| [20] | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| [21] | YEW Z J, LEE G H. RPM-Net: robust point matching using learned features[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11821-11830. |
| [22] | XU H, LIU S, WANG G, et al. OMNet: learning overlapping mask for partial-to-partial point cloud registration[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3112-3121. |
| [23] | GINZBURG D, RAVIV D. Deep weighted consensus dense correspondence confidence maps for 3D shape registration[C]// Proceedings of the 2022 IEEE International Conference on Image Processing. Piscataway: IEEE, 2022: 71-75. |
| [24] | WANG Y, SOLOMON J. Deep Closest Point: learning representations for point cloud registration[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 3522-3531. |
| [25] | QIN Z, YU H, WANG C, et al. GeoTransformer: fast and robust point cloud registration with geometric Transformer[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 9806-9821. |
| [26] | XIE Y, WANG B, LI S, et al. Iterative feedback network for unsupervised point cloud registration[J]. IEEE Robotics and Automation Letters, 2024, 9(3): 2327-2334. |
| [27] | FU K, LUO J, LUO X, et al. Robust point cloud registration framework based on deep graph matching[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(5): 6183-6195. |
| [28] | SHI C, CHEN X, HUANG K, et al. Keypoint matching for point cloud registration using multiplex dynamic graph attention networks[J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8221-8228. |
| [29] | ZAMAN A, YANGYU F, AYUB M S, et al. CMDGAT: knowledge extraction and retention based continual graph attention network for point cloud registration[J]. Expert Systems with Applications, 2023, 214: No.119098. |
| [30] | SUN L, ZHANG Z, ZHONG R, et al. A weakly supervised graph deep learning framework for point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2022, 60: No.5702012. |
| [31] | LIU S, WANG T, ZHANG Y, et al. Deep semantic graph matching for large-scale outdoor point cloud registration[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: No.5701412. |
| [32] | PAN L, CAI Z, LIU Z. Robust partial-to-partial point cloud registration in a full range[J]. IEEE Robotics and Automation Letters, 2024, 9(3): 2861-2868. |
| [33] | SHE R, KANG Q, WANG S, et al. PointDifformer: robust point cloud registration with neural diffusion and Transformer[J]. IEEE Transactions on Geoscience and Remote Sensing, 2024, 62: No.5701015. |
| [34] | GUO M H, XU T X, LIU J J, et al. Attention mechanisms in computer vision: a survey[J]. Computational Visual Media, 2022, 8(3): 331-368. |
| [35] | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1912-1920. |
| [36] | YI L, KIM V G, CEYLAN D, et al. A scalable active framework for region annotation in 3D shape collections[J]. ACM Transactions on Graphics, 2016, 35(6): No.210. |
| [37] | BOGO F, ROMERO J, LOPER M, et al. FAUST: dataset and evaluation for 3D mesh registration[C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 3794-3801. |
| [38] | HEZRONI I, DRORY A, GIRYES R, et al. DeepBBS: deep best buddies for point cloud registration[C]// Proceedings of the 2021 International Conference on 3D Vision. Piscataway: IEEE, 2021: 342-351. |
| [39] | LI J, ZHANG C, XU Z, et al. Iterative distance-aware similarity matrix convolution with mutual-supervised point elimination for efficient point cloud registration[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12369. Cham: Springer, 2020: 378-394. |
| [40] | HUANG S, GOJCIC Z, USVYATSOV M, et al. PREDATOR: registration of 3D point clouds with low overlap[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 4265-4274. |
| [41] | YEW Z J, LEE G H. REGTR: end-to-end point cloud correspondences with Transformers[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 6667-6676. |
| [42] | XU H, YE N, LIU G, et al. FINet: dual branches feature interaction for partial-to-partial point cloud registration[C]// Proceedings of the 36th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2022: 2848-2856. |
| [43] | LIU Z, HE K, ZHANG D, et al. Local feature guidance framework for robust 3D point cloud registration[J]. The Visual Computer, 2023, 39(12): 6459-6472. |
| [44] | CAO F, WANG L, YE H. SharpGConv: a novel graph method with plug-and-play sharpening convolution for point cloud registration[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2024, 34(8): 7095-7105. |
| [1] | Hongjun ZHANG, Gaojun PAN, Hao YE, Yubin LU, Yiheng MIAO. Multi-source heterogeneous data analysis method combining deep learning and tensor decomposition [J]. Journal of Computer Applications, 2025, 45(9): 2838-2847. |
| [2] | Jin LI, Liqun LIU. SAR and visible image fusion based on residual Swin Transformer [J]. Journal of Computer Applications, 2025, 45(9): 2949-2956. |
| [3] | Bing YIN, Zhenhua LING, Yin LIN, Changfeng XI, Ying LIU. Emotion recognition method compatible with missing modal reasoning [J]. Journal of Computer Applications, 2025, 45(9): 2764-2772. |
| [4] | Weigang LI, Jiale SHAO, Zhiqiang TIAN. Point cloud classification and segmentation network based on dual attention mechanism and multi-scale fusion [J]. Journal of Computer Applications, 2025, 45(9): 3003-3010. |
| [5] | Xiang WANG, Zhixiang CHEN, Guojun MAO. Multivariate time series prediction method combining local and global correlation [J]. Journal of Computer Applications, 2025, 45(9): 2806-2816. |
| [6] | Zhixiong XU, Bo LI, Xiaoyong BIAN, Qiren HU. Adversarial sample embedded attention U-Net for 3D medical image segmentation [J]. Journal of Computer Applications, 2025, 45(9): 3011-3016. |
| [7] | Panfeng JING, Yudong LIANG, Chaowei LI, Junru GUO, Jinyu GUO. Semi-supervised image dehazing algorithm based on teacher-student learning [J]. Journal of Computer Applications, 2025, 45(9): 2975-2983. |
| [8] | Chao SHI, Yuxin ZHOU, Qian FU, Wanyu TANG, Ling HE, Yuanyuan LI. Action recognition algorithm for ADHD patients using skeleton and 3D heatmap [J]. Journal of Computer Applications, 2025, 45(9): 3036-3044. |
| [9] | Jinggang LYU, Shaorui PENG, Shuo GAO, Jin ZHOU. Speech enhancement network driven by complex frequency attention and multi-scale frequency enhancement [J]. Journal of Computer Applications, 2025, 45(9): 2957-2965. |
| [10] | Yanhua LIAO, Yuanxia YAN, Wenlin PAN. Multi-target detection algorithm for traffic intersection images based on YOLOv9 [J]. Journal of Computer Applications, 2025, 45(8): 2555-2565. |
| [11] | Haifeng WU, Liqing TAO, Yusheng CHENG. Partial label regression algorithm integrating feature attention and residual connection [J]. Journal of Computer Applications, 2025, 45(8): 2530-2536. |
| [12] | Peng PENG, Ziting CAI, Wenling LIU, Caihua CHEN, Wei ZENG, Baolai HUANG. Speech emotion recognition method based on hybrid Siamese network with CNN and bidirectional GRU [J]. Journal of Computer Applications, 2025, 45(8): 2515-2521. |
| [13] | Chao JING, Yutao QUAN, Yan CHEN. Improved multi-layer perceptron and attention model-based power consumption prediction algorithm [J]. Journal of Computer Applications, 2025, 45(8): 2646-2655. |
| [14] | Shuo ZHANG, Guokai SUN, Yuan ZHUANG, Xiaoyu FENG, Jingzhi WANG. Dynamic detection method of eclipse attacks for blockchain node analysis [J]. Journal of Computer Applications, 2025, 45(8): 2428-2436. |
| [15] | Jinhao LIN, Chuan LUO, Tianrui LI, Hongmei CHEN. Thoracic disease classification method based on cross-scale attention network [J]. Journal of Computer Applications, 2025, 45(8): 2712-2719. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||