


《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (5): 1634-1641.DOI: 10.11772/j.issn.1001-9081.2021050745
收稿日期:2021-05-10
修回日期:2021-09-12
接受日期:2021-12-21
发布日期:2022-03-08
出版日期:2022-05-10
通讯作者:
刘延飞
作者简介:刘延飞(1975—),男,陕西咸阳人,教授,博士,主要研究方向:最优控制、嵌入式系统 bbmcu@126.com基金资助:
Yanfei LIU( ), Zheng PENG, Yihui WANG, Zhong WANG
), Zheng PENG, Yihui WANG, Zhong WANG
Received:2021-05-10
Revised:2021-09-12
Accepted:2021-12-21
Online:2022-03-08
Published:2022-05-10
Contact:
Yanfei LIU
About author:LIU Yanfei, born in 1975, Ph. D., professor. His researchinterests include optimum control,embedded system.Supported by:摘要:
针对有刷直流(DC)电机的比例积分微分(PID)参数整定工作复杂耗时的问题,提出了一种基于改进型遗传算法(GA)的PID参数整定方法。首先,提出了适应度增强淘汰法则,改进了传统GA的选择过程;然后,提出了基因感染交叉方法,保证了进化过程中平均适应度值的增加;最后,删除了传统GA中不必要的复制操作,提升了算法的运行速度。通过电机传递函数进行建模和仿真分析。实验结果表明,与常规整定方法相比,所提改进型GA能够显著提升PID参数整定效果,且改进型GA相较于传统GA,达到同样进化效果所需的进化代数减少了79%,算法运行速度提升了4.1%。所提出的改进型GA从选择和交叉两个关键操作步骤对GA进行了改进,并应用于PID参数整定使得上升时间更少、稳定时间更短、过冲更小。
中图分类号:
刘延飞, 彭征, 王艺辉, 王忠. 基于改进的遗传算法的有刷直流电机PID参数整定[J]. 计算机应用, 2022, 42(5): 1634-1641.
Yanfei LIU, Zheng PENG, Yihui WANG, Zhong WANG. PID parameter tuning of brushed direct-current motor based on improved genetic algorithm[J]. Journal of Computer Applications, 2022, 42(5): 1634-1641.

图1 PID控制器
Fig. 1 PID controller
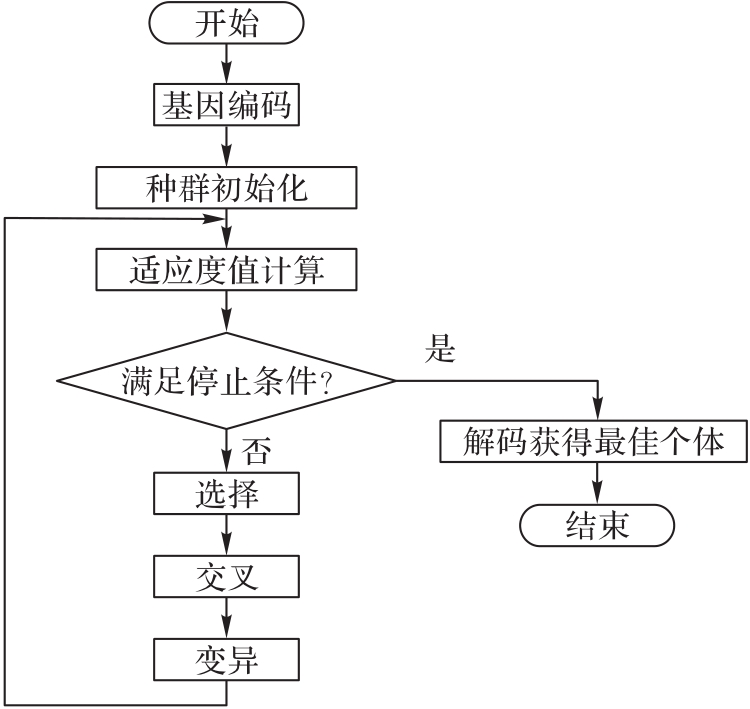
图2 遗传算法流程
Fig. 2 Flow chart of genetic algorithm
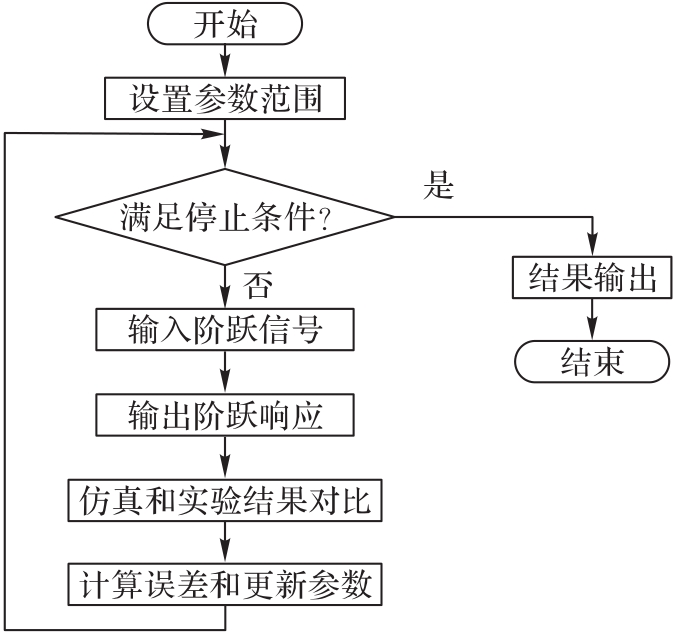
图3 电机参数估计
Fig. 3 Motor parameter estimation
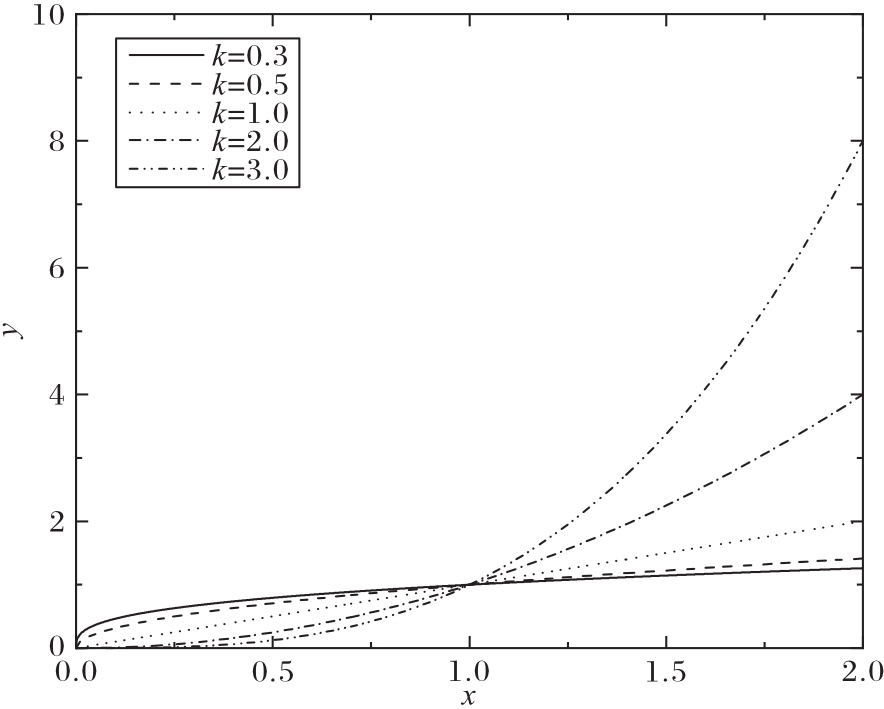
图4 函数y=xkk=0.3,0.5,1.0,2.0,3.0曲线
Fig. 4 Curves for function y=xkk=0.3,0.5,1.0,2.0,3.0
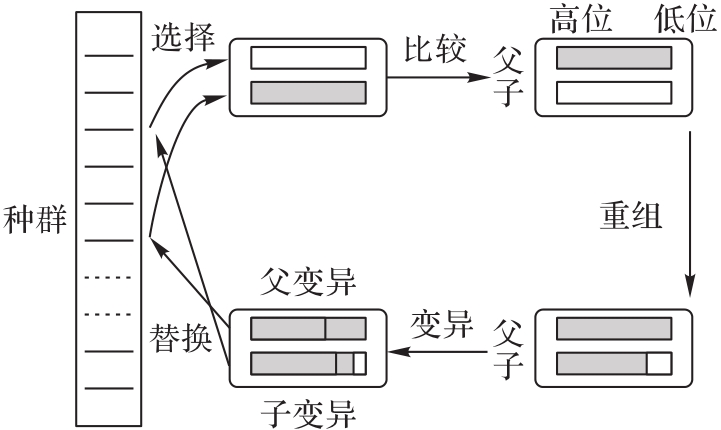
图5 基因感染交叉操作
Fig. 5 Gene infection crossover operation
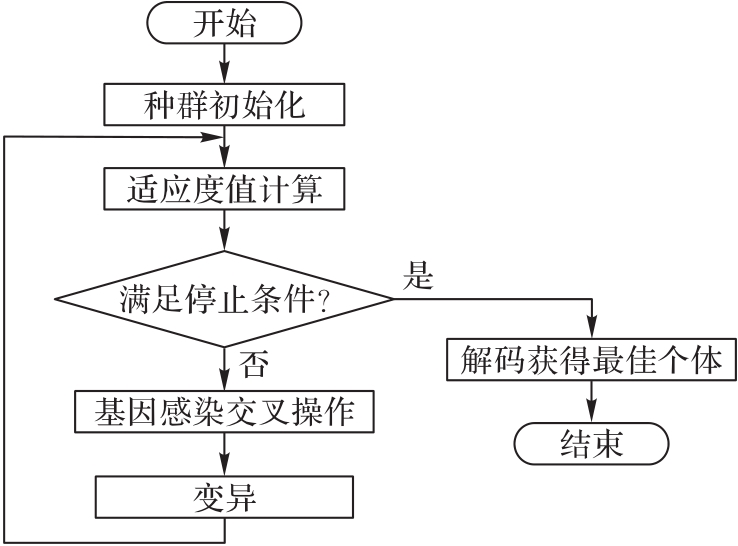
图6 增强感染遗传算法流程
Fig. 6 Flow chart of enhanced infection genetic algorithm
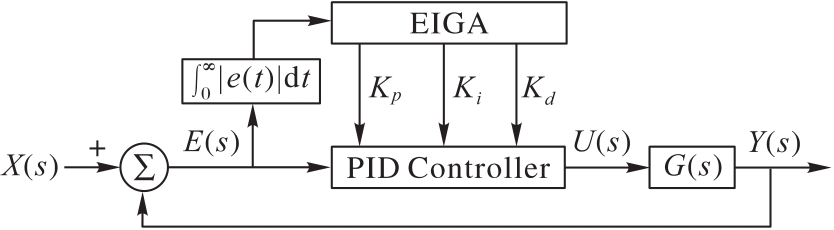
图7 基于EIGA的PID控制器
Fig. 7 PID controller based on EIGA
| 参数 | 值 |
|---|---|
| 电阻 | 0.476 |
| 电驱电感 | 0.200 |
| 转矩常数 | 3.87 |
| 阻尼系数 | 4.16 |
| 反电动势系数 | 4.00 |
| 系统转动惯量 | 4.40 |
表1 直流电机的参数
Tab. 1 Parameters of DC motor
| 参数 | 值 |
|---|---|
| 电阻 | 0.476 |
| 电驱电感 | 0.200 |
| 转矩常数 | 3.87 |
| 阻尼系数 | 4.16 |
| 反电动势系数 | 4.00 |
| 系统转动惯量 | 4.40 |
| 参数 | 值 |
|---|---|
| 种群大小 | 220 |
| 进化代数 | 70 |
| 交叉率 | 0.5 |
| 变异率 | 0.005 |
| (0,5) | |
| (0,4) | |
| (0,6) |
表2 GA 和 EIGA的参数
Tab. 2 Parameters of GA and EIGA
| 参数 | 值 |
|---|---|
| 种群大小 | 220 |
| 进化代数 | 70 |
| 交叉率 | 0.5 |
| 变异率 | 0.005 |
| (0,5) | |
| (0,4) | |
| (0,6) |
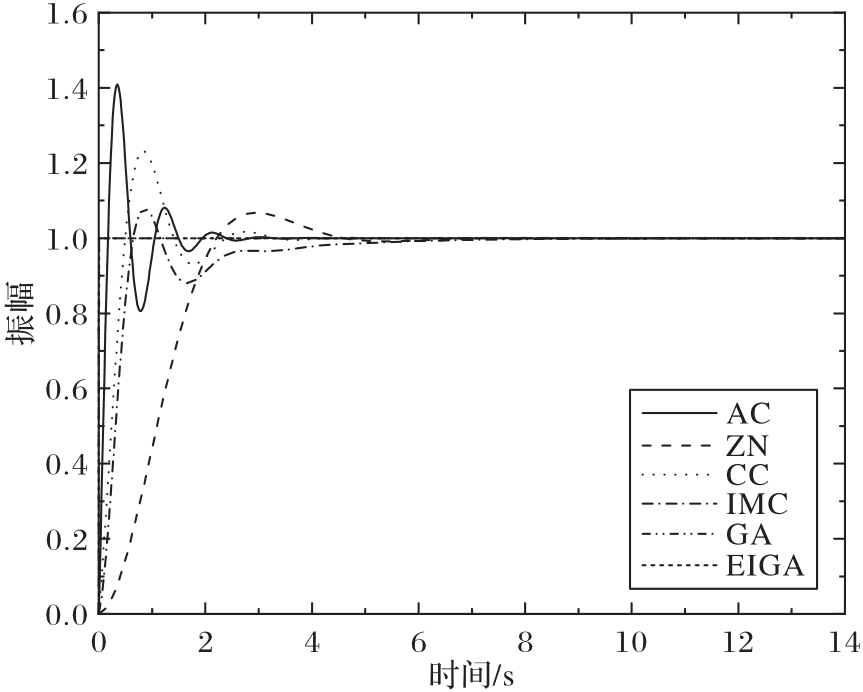
图8 不同方法的阶跃响应
Fig. 8 Step response of different methods
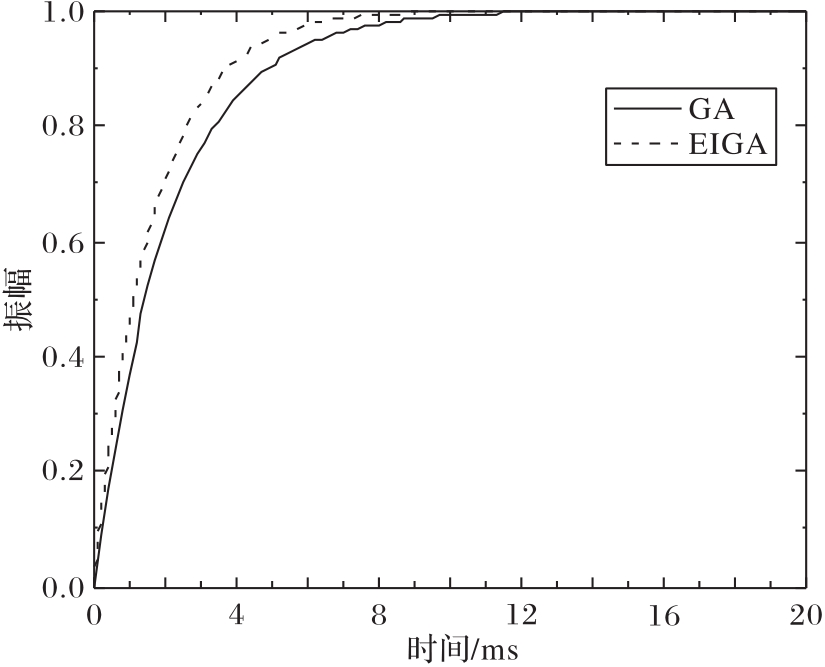
图9 GA与EIGA的阶跃响应
Fig. 9 Step response of GA and EIGA
| 方法 | 上升时间/s | 稳定时间/s | 过冲/% |
|---|---|---|---|
| AC | 0.176 5 | 1.818 2 | 0.408 6 |
| ZN | 2.240 9 | 4.033 6 | 0.067 8× |
| CC | 0.515 0 | 2.188 8 | 0.231 5 |
| IMC | 0.666 7 | 4.111 1 | 0.078 2 |
| GA | 0.012 4 | 0.008 0 | 8.769 4× |
| EIGA | 0.008 9 | 0.005 2 | 2.426 2× |
表3 不同方法下的系统响应性能
Tab. 3 System response performance under different methods
| 方法 | 上升时间/s | 稳定时间/s | 过冲/% |
|---|---|---|---|
| AC | 0.176 5 | 1.818 2 | 0.408 6 |
| ZN | 2.240 9 | 4.033 6 | 0.067 8× |
| CC | 0.515 0 | 2.188 8 | 0.231 5 |
| IMC | 0.666 7 | 4.111 1 | 0.078 2 |
| GA | 0.012 4 | 0.008 0 | 8.769 4× |
| EIGA | 0.008 9 | 0.005 2 | 2.426 2× |
| 方法 | |||
|---|---|---|---|
| AC | 0.158 8 | 0.636 9 | 0.013 2 |
| ZN | 0.002 8 | 0.009 0 | 1.067 9 |
| CC | 0.034 1 | 0.063 4 | 0.003 7 |
| IMC | 0.031 0 | 0.019 0 | 0.001 2 |
| GA | 3.565 5 | 3.981 4 | 1.086 9 |
| EIGA | 4.824 8 | 3.995 0 | 1.686 8 |
表4 不同方法整定的PID参数
Tab. 4 PID parameters tuned by different methods
| 方法 | |||
|---|---|---|---|
| AC | 0.158 8 | 0.636 9 | 0.013 2 |
| ZN | 0.002 8 | 0.009 0 | 1.067 9 |
| CC | 0.034 1 | 0.063 4 | 0.003 7 |
| IMC | 0.031 0 | 0.019 0 | 0.001 2 |
| GA | 3.565 5 | 3.981 4 | 1.086 9 |
| EIGA | 4.824 8 | 3.995 0 | 1.686 8 |
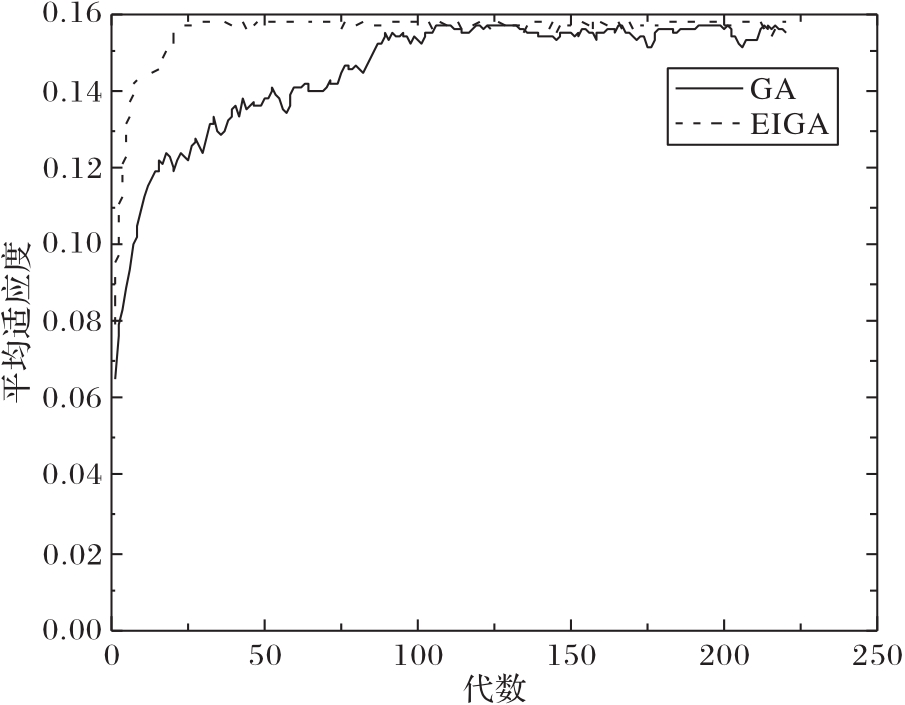
图10 GA与EIGA的个体平均适应度
Fig. 10 Individual average fitness of GA and EIGA
| 方法 | 最高适应度值的比例 | ||||
|---|---|---|---|---|---|
| 60% | 90% | 95% | 99% | 100% | |
| GA | 7 | 75 | 86 | — | — |
| EIGA | 2 | 8 | 18 | 159 | 166 |
表5 对应适应度值的进化代数
Tab. 5 Generation number corresponding to fitness value
| 方法 | 最高适应度值的比例 | ||||
|---|---|---|---|---|---|
| 60% | 90% | 95% | 99% | 100% | |
| GA | 7 | 75 | 86 | — | — |
| EIGA | 2 | 8 | 18 | 159 | 166 |
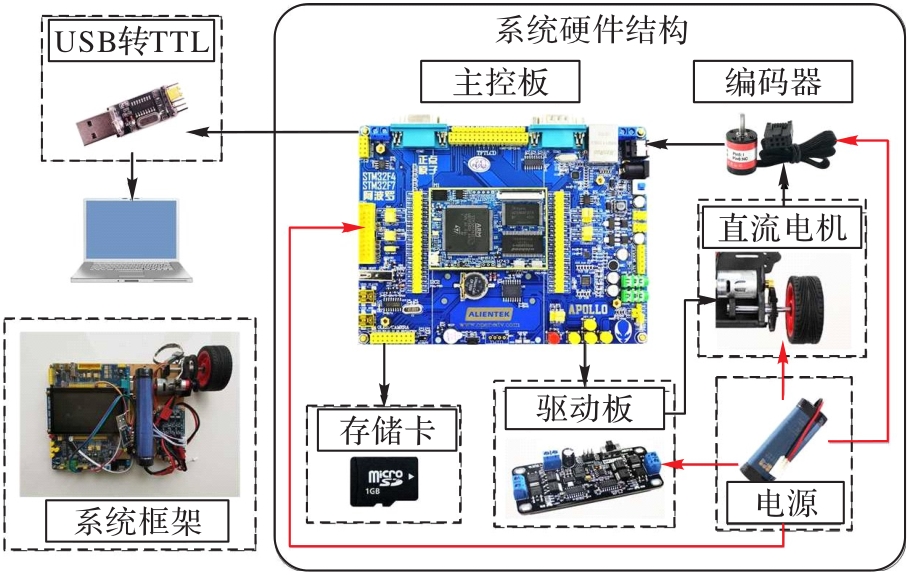
图11 直流电机控制系统
Fig. 11 DC motor control system
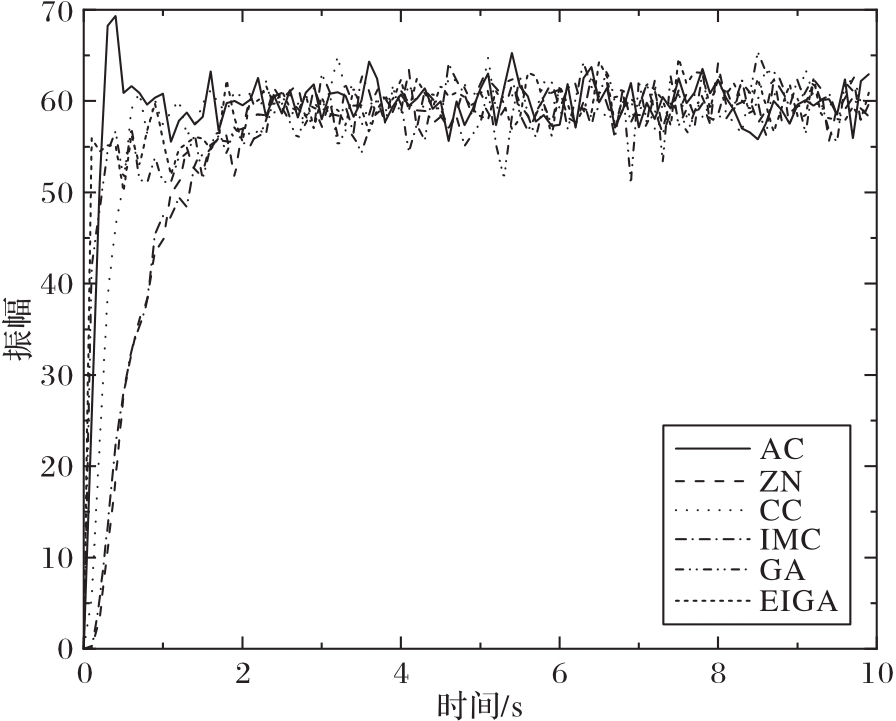
图12 不同方法的系统阶跃响应
Fig. 12 System step response of different methods
| 1 | YAN W B, WANG D D, JIA P F, et al. The PWM speed regulation of DC motor based on intelligent control [J]. Systems Engineering Procedia, 2012, 3: 259-267. 10.1016/j.sepro.2011.11.028 |
| 2 | DIMEAS I, PETRAS I, PSYCHALINOS C. New analog implementation technique for fractional-order controller: a DC motor control [J]. AEU — International Journal of Electronics and Communications, 2017, 78: 192-200. 10.1016/j.aeue.2017.03.010 |
| 3 | 李昊伦.基于PLC的小型履带式农用动力底盘控制系统设计[D].保定:河北农业大学,2021:19-20. |
| LI H L. Design of small crawler type agricultural power chassis control system based on PLC [D]. Baoding: Hebei Agricultural University, 2021: 19-20. | |
| 4 | 赵天才,余洪锋,郝向泽,等.基于PID算法的水稻直播机播量控制系统的设计与试验[J].华南农业大学学报,2019,40(2):118-125. 10.7671/j.issn.1001-411X.201805007 |
| ZHAO T C, YU H F, HAO X Z, et al. Design and experiment of sowing control system for rice direct seeder based on PID algorithm [J]. Journal of South China Agricultural University, 2019, 40(2):118-125 . 10.7671/j.issn.1001-411X.201805007 | |
| 5 | 吕东阳,王显军.基于模糊PID控制的电机转台伺服系统[J].计算机应用,2014,34(S1):166-168,185. |
| LYU D Y, WANG X J. Servo motor system based on fuzzy PID control [J]. Journal of Computer Applications, 2014, 34(S1):166-168, 185. | |
| 6 | 黄玉钏,曲道奎,徐方,等.伺服电机的预测控制与比例-积分-微分控制[J].计算机应用,2012,32(10):2944-2947. 10.3724/SP.J.1087.2012.02944 |
| HUANG Y C, QU D K, XU F, et al. Model predictive control and PID control on servo motor [J]. Journal of Computer Applications, 2012, 32(10): 2944-2947. 10.3724/SP.J.1087.2012.02944 | |
| 7 | CIVELEK Z, LÜY M, ÇAM E, et al. Control of pitch angle of wind turbine by fuzzy PID controller [J]. Intelligent Automation and Soft Computing, 2016, 22(3): 463-471. 10.1080/10798587.2015.1095417 |
| 8 | MAMUR H. Design, application, and power performance analyses of a micro wind turbine [J]. Turkish Journal of Electrical Engineering and Computer Sciences, 2015, 23(6): 1619-1637. 10.3906/elk-1401-174 |
| 9 | 于国强,刘克天,胡尊民,等.基于Ziegler-Nichols优化算法的火电机组负荷频率PID控制研究[J].热力发电,2021,50(9):137-144. |
| YU G Q, LIU K T, HU Z M, et al. PID control of load frequency of thermal power unit based on Ziegler-Nichols optimization algorithm [J]. Thermal Power Generation, 2021, 50(9): 137-144. | |
| 10 | BRITO A G. On the misunderstanding of the Ziegler-Nicholsʼs formulae usage [J]. IEEE/CAA Journal of Automatica Sinica, 2019, 6(1): 142-147. 10.1109/jas.2019.1911336 |
| 11 | FIŠER J, ZÍTEK P. PID controller tuning via dominant pole placement in comparison with Ziegler-Nichols tuning [J]. IFAC-PapersOnLine, 2019, 52(18): 43-48. 10.1016/j.ifacol.2019.12.204 |
| 12 | ISDARYANI F, FERIYONIKA F, FERDIANSYAH R. Comparison of Ziegler-Nichols and Cohen Coon tuning method for magnetic levitation control system [J]. Journal of Physics: Conference Series, 2020, 1450: Article No.012033. 10.1088/1742-6596/1450/1/012033 |
| 13 | GAMASU R, JASTI V R B. Robust Cohen-Coon PID controller for flexibility of double link manipulator [J]. International Journal of Control and Automation, 2014, 7(1): 357-368. 10.14257/ijca.2014.7.1.32 |
| 14 | 盛锴,邱靖,周刚,等.基于IMC-PID的超临界火电机组AGC性能优化[J/OL].控制工程.(2021-01-18)[2021-09-09].. |
| SHENG K, QIU J, ZHOU G, et al. Performance optimization of supercritical thermal power unit’s automatic generation control based on IMC-PID [J/OL]. Control Engineering of China. (2021-01-18) [2021-09-09]. . | |
| 15 | SHAMSUZZOHA M. IMC based robust PID controller tuning for disturbance rejection [J]. Journal of Central South University, 2016, 23(3): 581-597. 10.1007/s11771-016-3105-1 |
| 16 | BEGUM K G, RAO A S, RADHAKRISHNAN T K. Enhanced IMC based PID controller design for Non-Minimum Phase (NMP) integrating processes with time delays [J]. ISA Transactions, 2017, 68: 223-234. 10.1016/j.isatra.2017.03.005 |
| 17 | WANG W B, LIU D Y, YAO Y Q. Study of PID control algorithm based on the critical ratio method [J]. Applied Mechanics and Materials, 2014, 494/495: 1246-1248. 10.4028/www.scientific.net/amm.494-495.1246 |
| 18 | XIA C G, CAO C. Tuning of PID parameters and fuzzy adaptive PID control of the hydrostatic driving system [J]. Advanced Materials Research, 2012, 403/404/405/406/407/408: 5112-5116. 10.4028/www.scientific.net/amr.403-408.5112 |
| 19 | ANG K H, CHONG G, LI Y. PID control system analysis, design, and technology [J]. IEEE Transactions on Control Systems Technology, 2005, 13(4): 559-576. |
| 20 | 黄书召,田军委,乔路,等.基于改进遗传算法的无人机路径规划[J].计算机应用,2021,41(2):390-397. |
| HUANG S Z, TIAN J W, QIAO L, et al. Unmanned aerial vehicle path planning based on improved genetic algorithm [J]. Journal of Computer Applications, 2021, 41(2):390-397. | |
| 21 | ZHONG S S, XIE X L, LIN L, et al. Genetic algorithm optimized double-reservoir echo state network for multi-regime time series prediction [J]. Neurocomputing, 2017, 238: 191-204. 10.1016/j.neucom.2017.01.053 |
| 22 | MOHAMAD E T, FARADONBEH R S, ARMAGHANI D J, et al. An optimized ANN model based on genetic algorithm for predicting ripping production [J]. Neural Computing and Applications, 2017, 28(S1): 393-406. 10.1007/s00521-016-2359-8 |
| 23 | ZAHIR A A M, ALHADY S S N, OTHMAN W, et al. Genetic algorithm optimization of PID controller for brushed DC motor [M]// HASSAN M H A. Intelligent Manufacturing & Mechatronics, LNME. Singapore: Springer, 2018: 427-437. 10.1007/978-981-10-8788-2_38 |
| 24 | MOUSAKAZEMI S M H, AYOOBIAN N, ANSARIFAR G R. Control of the reactor core power in PWR using optimized PID controller with the real-coded GA [J]. Annals of Nuclear Energy, 2018, 118: 107-121. 10.1016/j.anucene.2018.03.038 |
| 25 | SAMAKWONG T, ASSAWINCHAICHOTE W. PID controller design for electro-hydraulic servo valve system with genetic algorithm [J]. Procedia Computer Science, 2016, 86: 91-94. 10.1016/j.procs.2016.05.023 |
| 26 | WANG C C, CHEN F, ZHANG G, et al. Design of genetic algorithm optimized PID controller for gas mixture system [C]// Proceedings of the 2017 13th IEEE International Conference on Electronic Measurement and Instruments. Piscataway: IEEE, 2017: 6-9. 10.1109/icemi.2017.8265695 |
| [1] | 李晓寒, 贾华丁, 程雪, 李太勇. 基于改进遗传算法和图神经网络的股市波动预测方法[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1624-1633. |
| [2] | 刘忠慧, 王梓宥, 闵帆. 近似概念的遗传生成算法及其推荐应用[J]. 《计算机应用》唯一官方网站, 2022, 42(2): 412-418. |
| [3] | 陈权, 李莉, 陈永乐, 段跃兴. 面向深度学习可解释性的对抗攻击算法[J]. 《计算机应用》唯一官方网站, 2022, 42(2): 510-518. |
| [4] | 张闻强, 邢征, 杨卫东. 基于多区域采样策略的混合粒子群优化求解多目标柔性作业车间调度问题[J]. 计算机应用, 2021, 41(8): 2249-2257. |
| [5] | 张盟, 郭健全. 需求和回收不确定的闭环供应链渠道结构选择[J]. 计算机应用, 2021, 41(7): 2100-2107. |
| [6] | 杨震, 马健霄, 王宝杰. 设置待行区条件下双环相位信号配时优化模型[J]. 计算机应用, 2021, 41(7): 2108-2112. |
| [7] | 李进, 王凤, 杨沈宇. 换电模式下电动车货运路径优化模型与算法[J]. 计算机应用, 2021, 41(6): 1792-1798. |
| [8] | 李舒仪, 韩晓龙. 海铁联运港口混合作业模式下轨道吊与集卡协同调度[J]. 计算机应用, 2021, 41(5): 1506-1513. |
| [9] | 周美玲, 陈淮莉. 基于负荷平衡的电动汽车模糊多目标充电调度算法[J]. 计算机应用, 2021, 41(4): 1192-1198. |
| [10] | 马晓梅, 何非. 基于改进遗传算法的标签印刷生产调度技术[J]. 计算机应用, 2021, 41(3): 860-866. |
| [11] | 王彬溶, 谭代伦, 郑伯川. 基于旅行商问题转化和遗传算法求解汽配件喷涂顺序[J]. 计算机应用, 2021, 41(3): 881-886. |
| [12] | 黄书召, 田军委, 乔路, 王沁, 苏宇. 基于改进遗传算法的无人机路径规划[J]. 计算机应用, 2021, 41(2): 390-397. |
| [13] | 张阳, 王小宁. 基于Word2Vec词嵌入和高维生物基因选择遗传算法的文本特征选择方法[J]. 《计算机应用》唯一官方网站, 2021, 41(11): 3151-3155. |
| [14] | 黄晓祥, 胡咏梅, 吴丹, 任力杰. 基于变分自编码器的异常颈动脉早期识别和预测[J]. 计算机应用, 2021, 41(10): 3082-3088. |
| [15] | 杨华龙, 王美玉, 辛禹辰. 横向整合战略下异质车辆库存路径优化模型[J]. 计算机应用, 2021, 41(10): 3040-3048. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||