《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (8): 2637-2642.DOI: 10.11772/j.issn.1001-9081.2021060975
• 前沿与综合应用 • 上一篇
Bao CHEN, Zupeng ZHOU( ), Huan WEI, Yanzhao LYU, Zhicheng SUI
), Huan WEI, Yanzhao LYU, Zhicheng SUI
摘要:
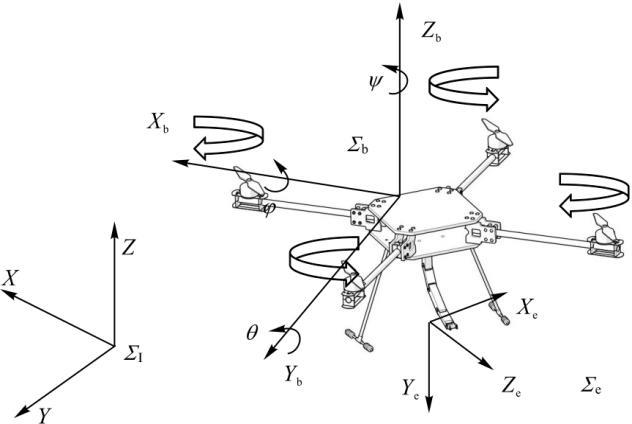
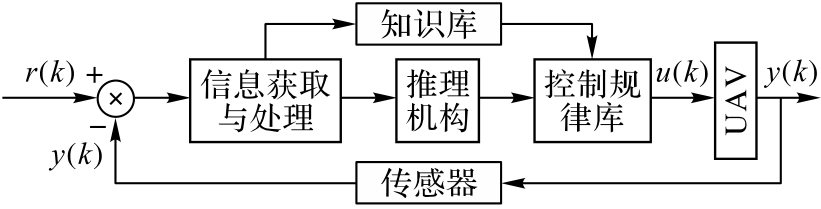
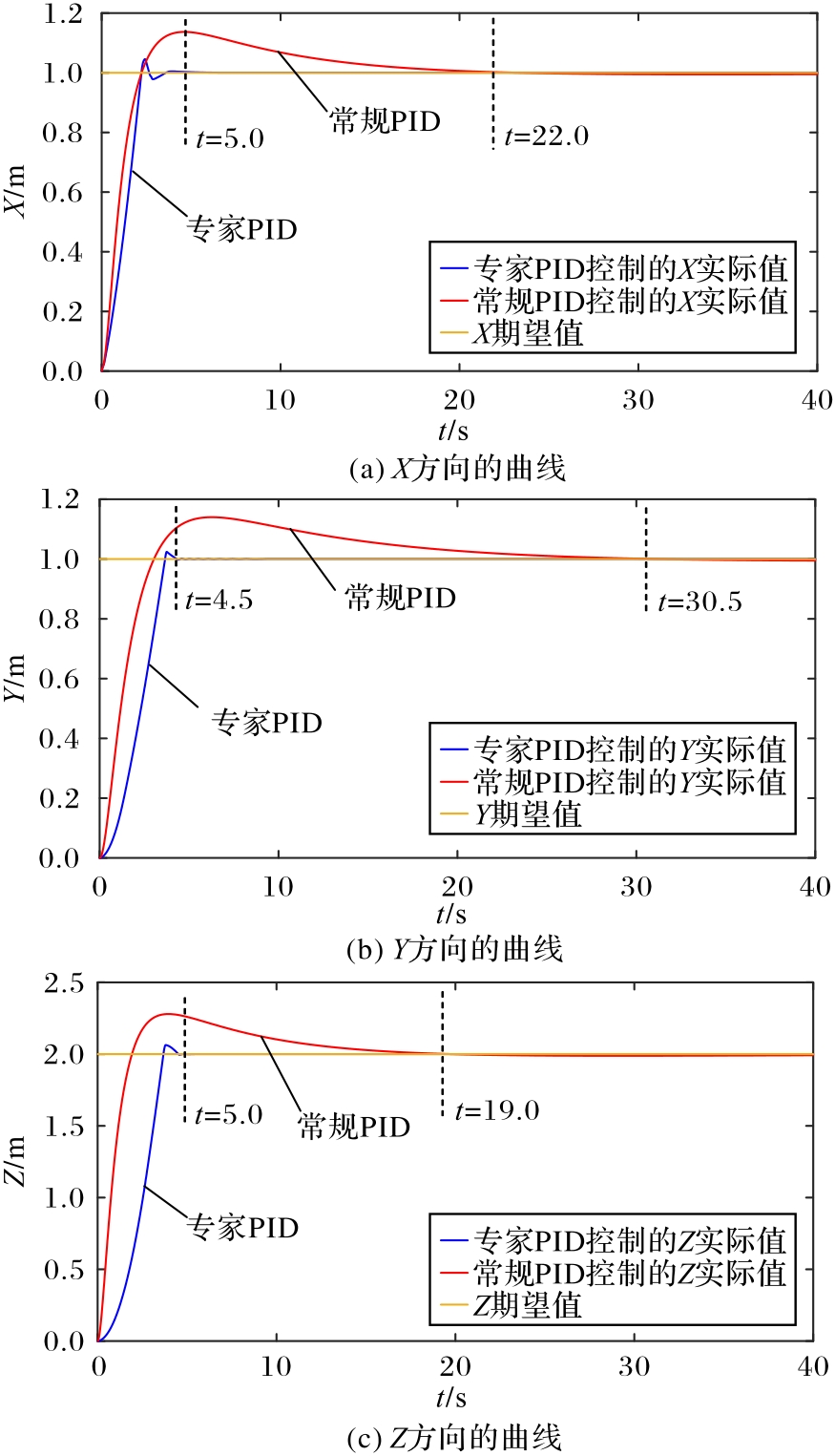
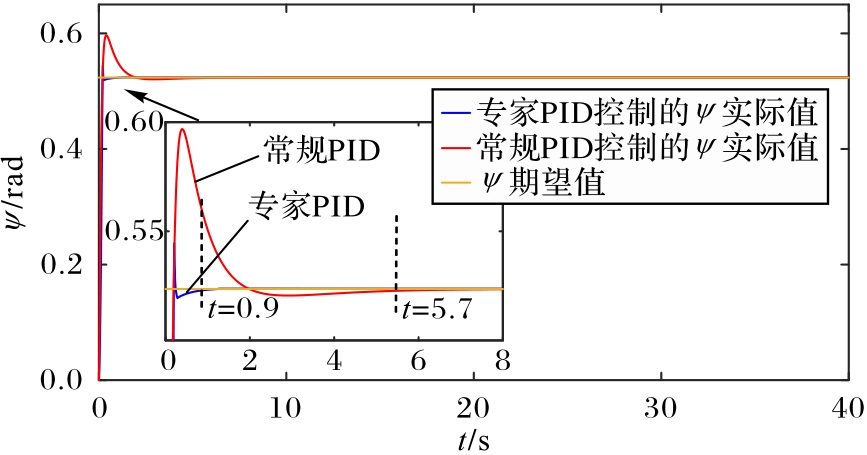
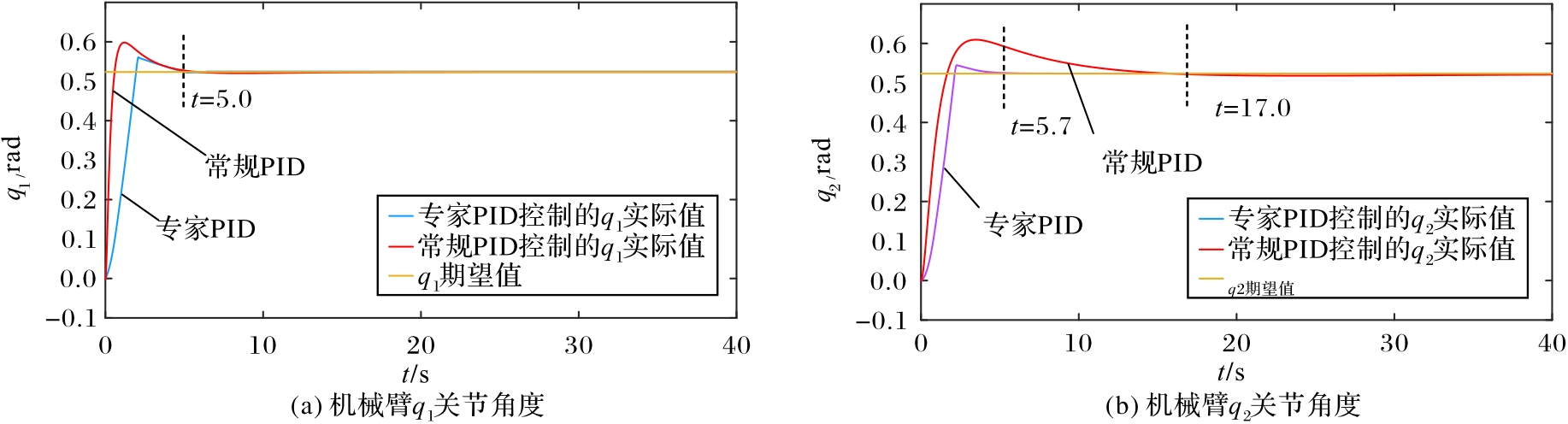
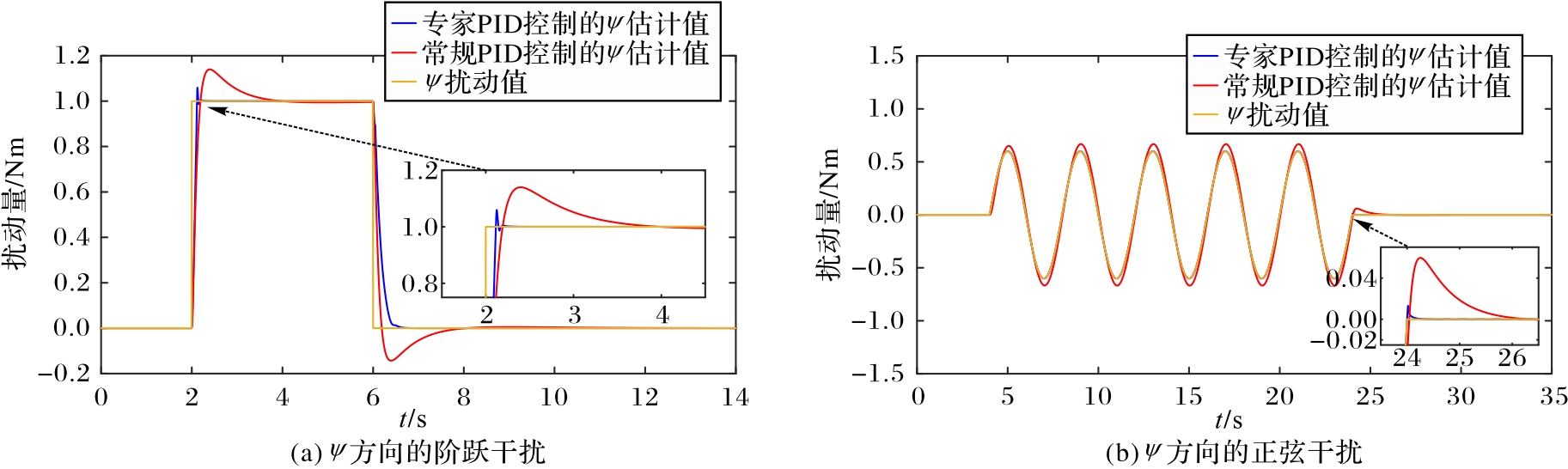
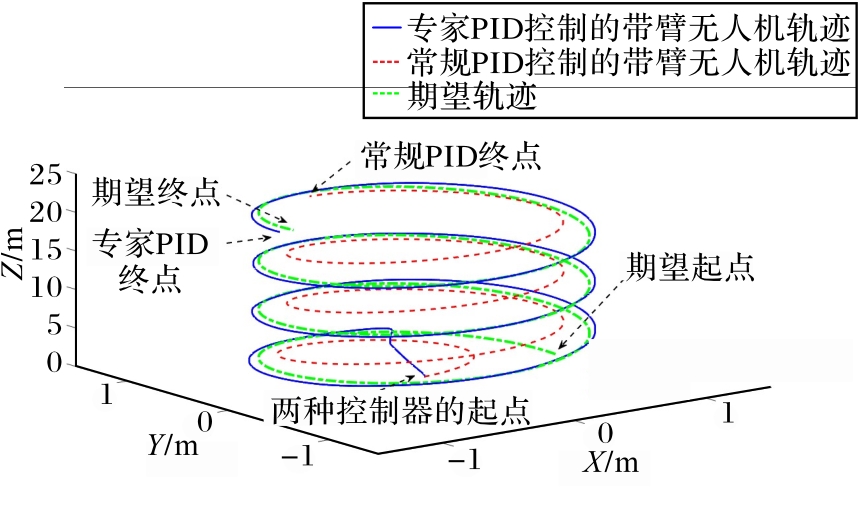
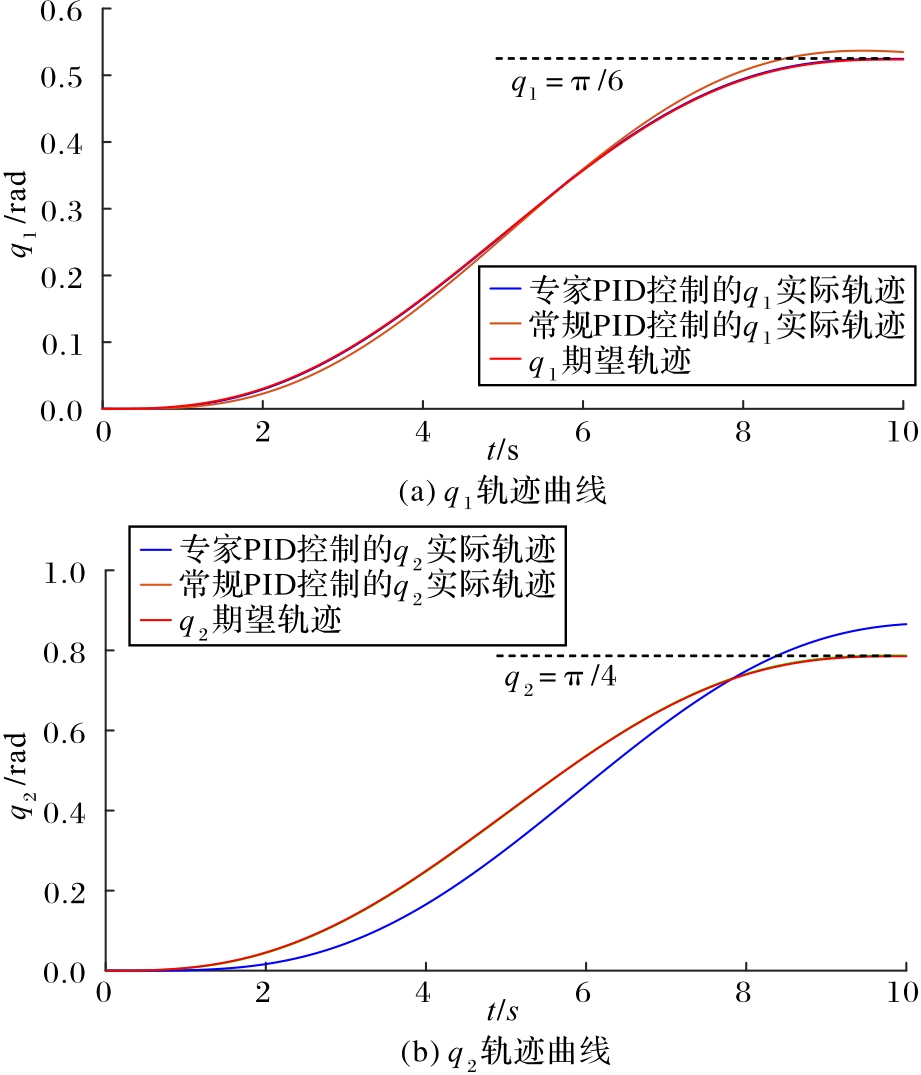
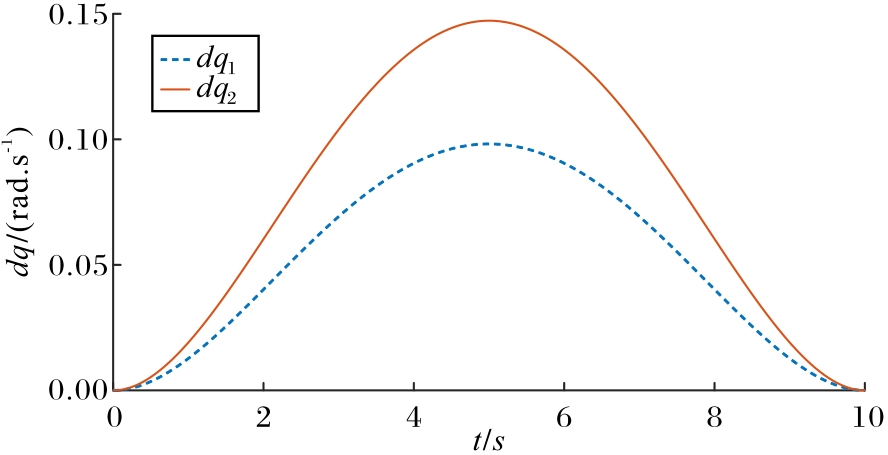
相较于未带臂的无人机,带臂无人机(UAV)的飞行轨迹会出现较大偏差,更难以稳定控制。为了解决带臂UAV的精确轨迹控制问题,提出基于专家PID的带臂四旋翼无人机控制方法。首先,将机械臂搭载于UAV上把它们作为整体,并通过拉格朗日方程建立了带臂UAV的运动学和动力学系统模型;其次,设计专家PID控制器用于对系统的稳定控制;然后利用五次多项式对带臂UAV的机械臂进行轨迹规划;最后,通过仿真验证专家PID控制方法对带臂UAV稳定控制的有效性。实验结果表明,相较于常规PID控制,所提基于专家PID的控制方法提高了系统的响应速度,且能够有效地抑制外部扰动;该方法对于动作情况下的机械臂能够稳定地跟踪其轨迹,且具有很好的抗扰性和鲁棒性。
中图分类号: