


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (1): 278-284.DOI: 10.11772/j.issn.1001-9081.2023010009
• 多媒体计算与计算机仿真 • 上一篇
刘健1,2, 尤晨晨1, 曹金明1, 曾琼1, 屠长河1( )
)
收稿日期:2023-01-06
修回日期:2023-03-18
接受日期:2023-03-20
发布日期:2023-06-06
出版日期:2024-01-10
通讯作者:
屠长河
作者简介:刘健(1987—),男,山东潍坊人,助理研究员,博士,CCF会员,主要研究方向:计算机图形学、机器人;基金资助:
Jian LIU1,2, Chenchen YOU1, Jinming CAO1, Qiong ZENG1, Changhe TU1()
Received:2023-01-06
Revised:2023-03-18
Accepted:2023-03-20
Online:2023-06-06
Published:2024-01-10
Contact:
Changhe TU
About author:LIU Jian, born in 1987, Ph. D., assistant research fellow. His research interests include computer graphics, robot.Supported by:摘要:
真实人手抓取数据在人类抓取行为分析和机器人类人抓取等研究中起到至关重要的作用。抓取数据集中应包含复杂形状的三维物体信息、抓取点的信息以及手的姿态和形状,然而目前普遍方法是采集视频图像并从中估计人的抓取行为,导致不能准确记录手部各个关节的自由度信息。利用虚拟现实技术建立虚拟环境,利用数据手套直接捕捉在虚拟环境中三维物体和手部姿态信息作为抓取数据。提出的数据集包含生活中常见的49类物体中的91个不同形状的物体(每个有108个姿态)以及共52 173人次的抓取记录,规模和丰富性都远远超过了已有的用于研究人类的抓取行为和研究以人为核心的抓取技术的数据集。此外,使用采集的数据集进行抓取显著性分析和类人抓取计算,实验结果验证了数据集的应用价值。
中图分类号:
刘健, 尤晨晨, 曹金明, 曾琼, 屠长河. 人手抓取物体的三维数据集的建立及应用[J]. 计算机应用, 2024, 44(1): 278-284.
Jian LIU, Chenchen YOU, Jinming CAO, Qiong ZENG, Changhe TU. Construction and application of 3D dataset of human grasping objects[J]. Journal of Computer Applications, 2024, 44(1): 278-284.

图1 用于抓取的物体模型
Fig. 1 Objects to be grasped by hand
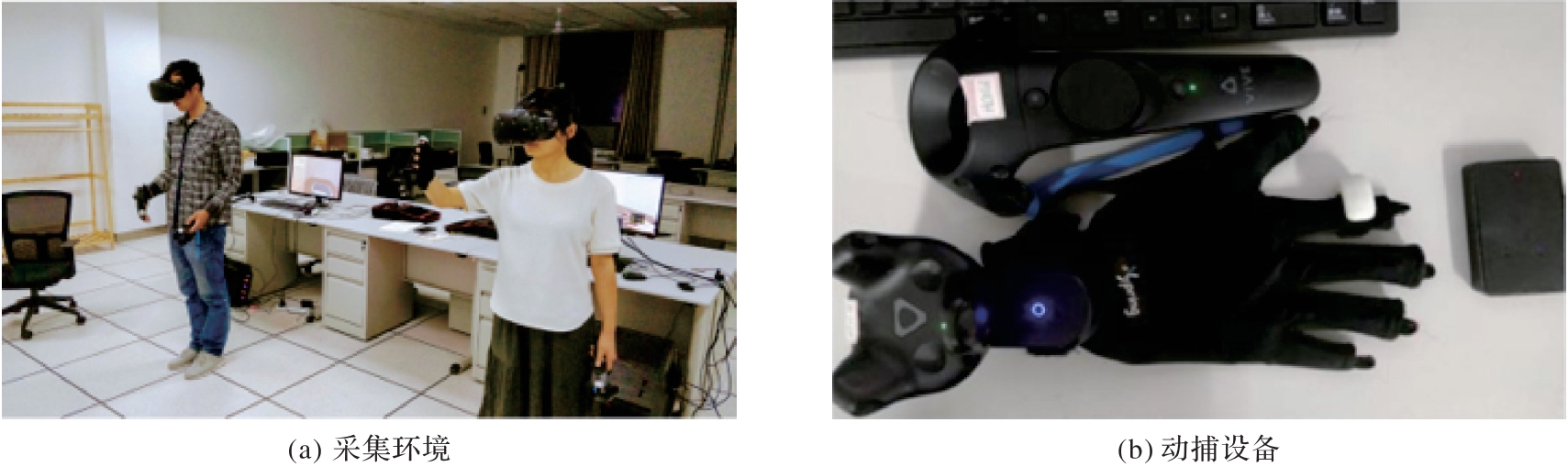
图2 虚拟抓取平台
Fig. 2 Virtual platform for grasping
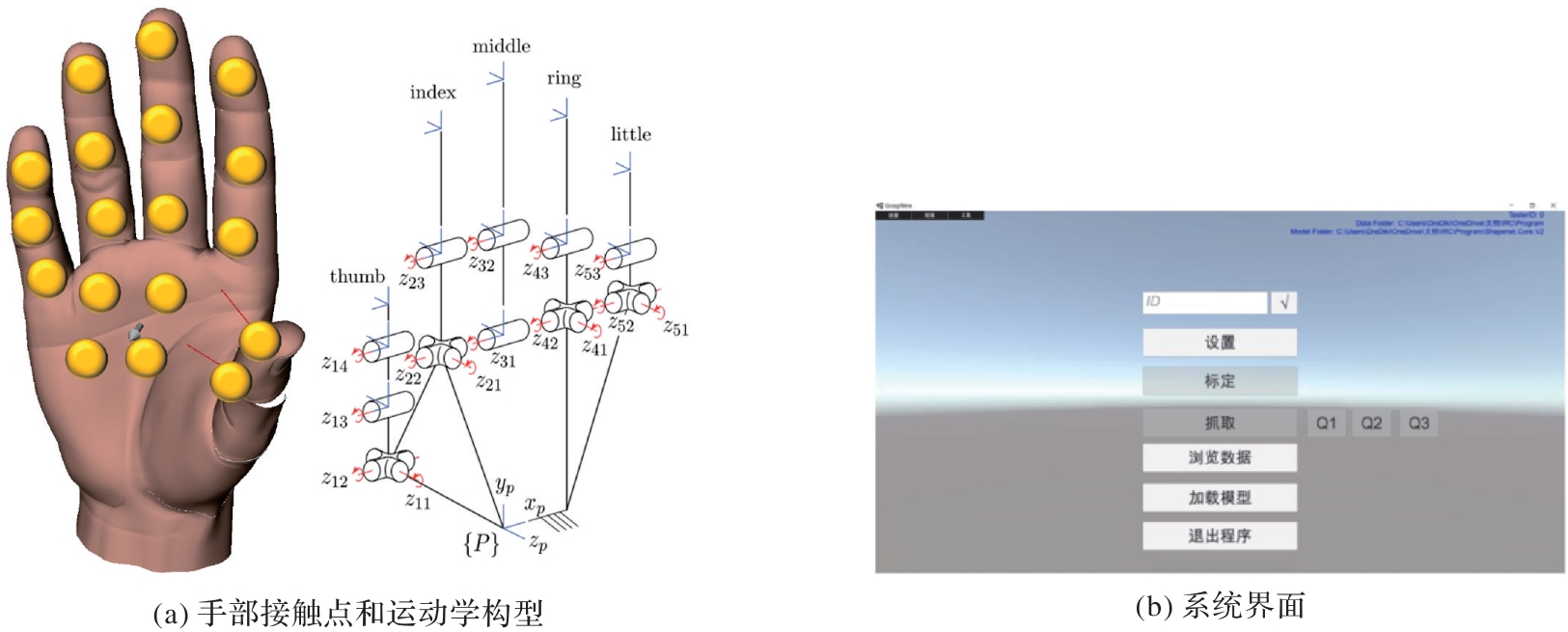
图3 基于Unity独立搭建的抓取数据采集系统
Fig. 3 Grasping data capture system built based on Unity

图4 不同的高度和姿态的抓取
Fig. 4 Grasping with different heights and poses

图5 采集抓取数据处理之后的结果
Fig. 5 Results after grasping data processing
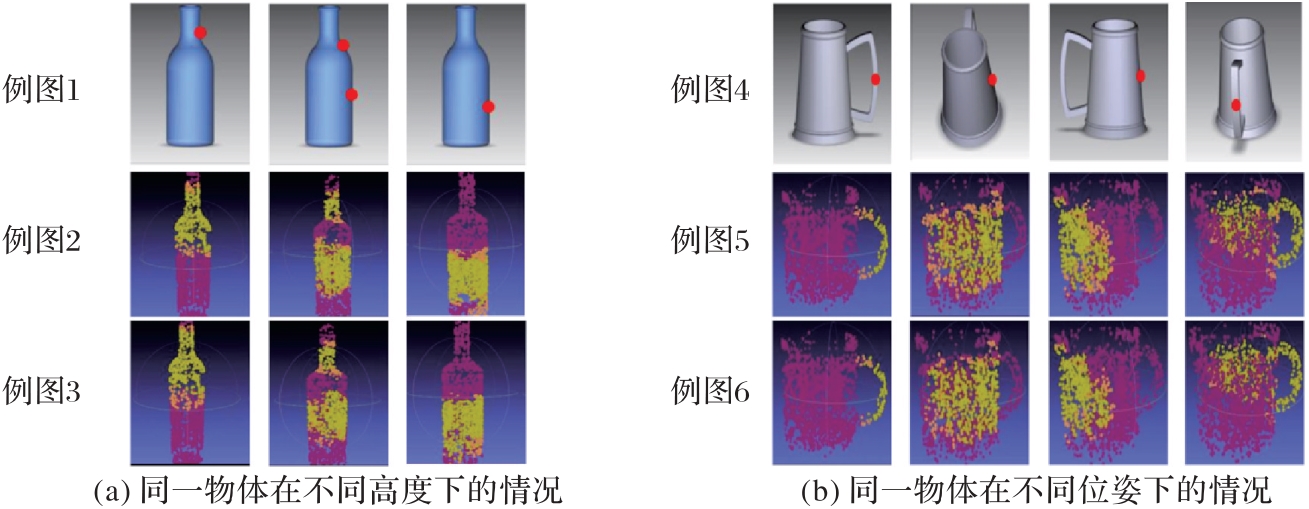
图6 深度神经网络学习物体抓取显著性分析结果
Fig. 6 Object grasping saliency analysis via deep neural network learning

图7 基于模拟退火算法的类人抓取计算
Fig. 7 Human-like grasping computation based on simulated annealing algorithm
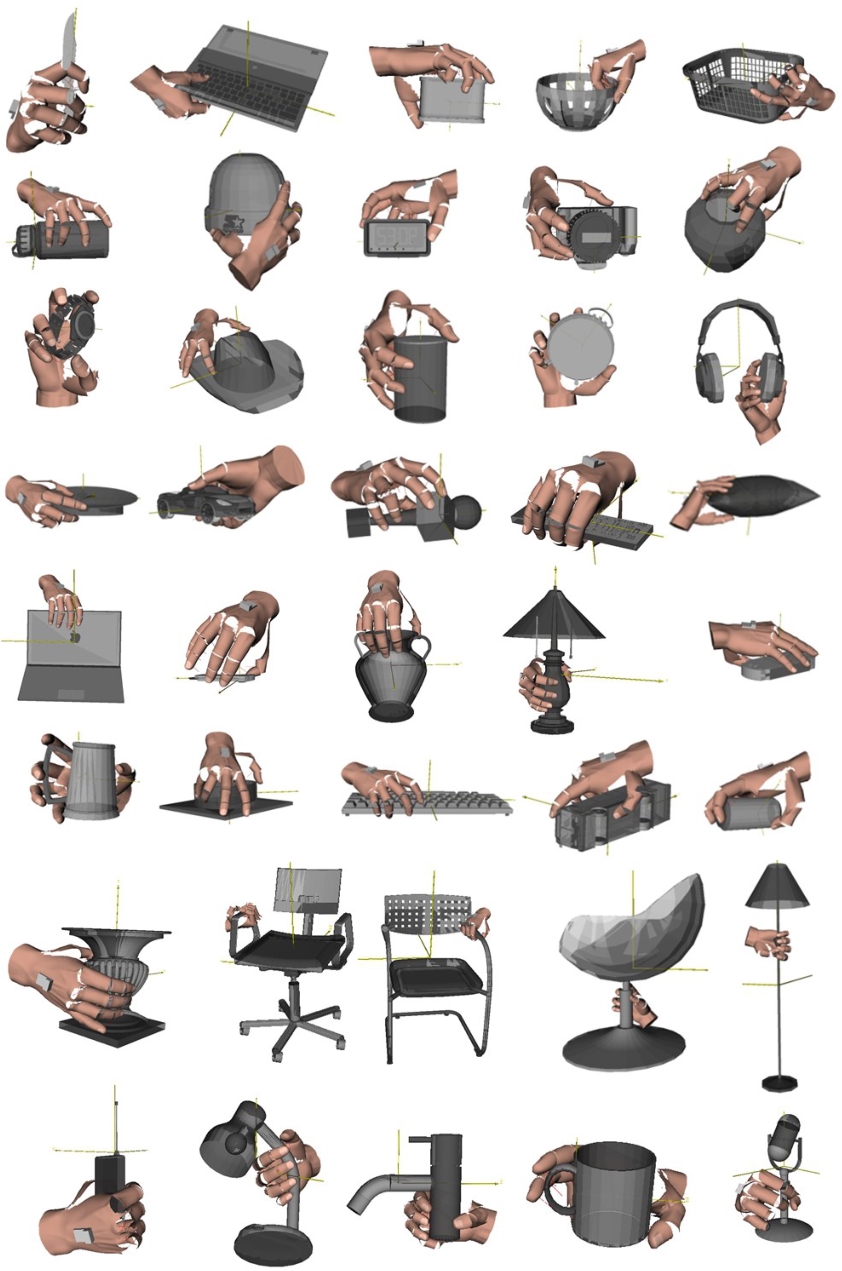
图8 不同物体的类人抓取计算结果
Fig. 8 Human-like calculation grasping results for various objects

图9 同一个物体的多个候选类人抓取结果
Fig. 9 Various human-like candidate grasping results for same object
| 1 | TEGIN J, EKVALL S, KRAGIC D, et al. Demonstration-based learning and control for automatic grasping [J]. Intelligent Service Robotics, 2009, 2: 23-30. 10.1007/s11370-008-0026-3 |
| 2 | YUN L, SUN Y. Grasp planning based on strategy extracted from demonstration [C]// Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2014: 4458-4463. 10.1109/iros.2014.6943193 |
| 3 | BRAHMBHATT S, HAM C, KEMP C C, et al. ContactDB: Analyzing and predicting grasp contact via thermal imaging [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 8701-8711. 10.1109/cvpr.2019.00891 |
| 4 | HUANG D-A, MA M, MA W-C, et al. How do we use our hands? Discovering a diverse set of common grasps [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 666-675. 10.1109/cvpr.2015.7298666 |
| 5 | BULLOCK I M, FEIX T, DOLLAR A M. The Yale human grasping dataset: Grasp, object and task data in household and machine shop environments [J]. The International Journal of Robotics Research, 2015, 34(3): 251-255. 10.1177/0278364914555720 |
| 6 | SAUDABAYEV A, RYSBEK Z, KHASSENOVA R, et al. Human grasping database for activities of daily living with depth, color and kinematic data streams [J]. Scientific Data, 2018, 5: 180101. 10.1038/sdata.2018.101 |
| 7 | HEUMER G, AMOR H B, WEBER M, et al. Grasp recognition with uncalibrated data gloves — a comparison of classification methods [C]// Proceedings of the 2007 IEEE Virtual Reality Conference. Piscataway: IEEE, 2007: 19-26. 10.1109/vr.2007.352459 |
| 8 | YUAN S, YE Q, STENGER B, et al. BigHand2.2M benchmark: Hand pose dataset and state of the art analysis [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4866-4874. 10.1109/cvpr.2017.279 |
| 9 | GARCIA-HERNANDO G, YUAN S, BAEK S, et al. First-person hand action benchmark with RGB-D videos and 3D hand pose annotations [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 409-419. 10.1109/cvpr.2018.00050 |
| 10 | CHANGE A X, FUNKHOUSER T, GUIBAS L, et al. ShapeNet: An information-rich 3D model repository [EB/OL]. (2015-12-09) [2023-01-05]. . |
| 11 | CAI M, KITANI K M, SATO Y. An ego-vision system for hand grasp analysis [J]. IEEE Transactions on Human-Machine Systems, 2017, 47(4): 524-535. 10.1109/thms.2017.2681423 |
| 12 | ABBASI B, NOOHI E, PARASTEGARI S, et al. Grasp taxonomy based on force distribution [C]// Proceedings of the 2016 25th IEEE International Symposium on Robot and Human Interactive Communication. Piscataway: IEEE, 2016: 1098-1103. 10.1109/roman.2016.7745245 |
| 13 | BETTI S, ZANI G, GUERRA S, et al. Reach-to-grasp movements: A multimodal techniques study [J]. Frontiers in Psychology, 2018, 9: 990. 10.3389/fpsyg.2018.00990 |
| 14 | PUHLMANN S, HEINEMANN F, BROCK O, et al. A compact representation of human single-object grasping [C]// Proceedings of the 2016 IEEE/RJS International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2016: 1954-1959. 10.1109/iros.2016.7759308 |
| 15 | HEINEMANN F, PUHIMANN S, EPPNER C, et al. A taxonomy of human grasping behavior suitable for transfer to robotic hands [C]// Proceedings of the 2015 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2015: 4286-4291. 10.1109/icra.2015.7139790 |
| 16 | KUMAR V, TODOROV E. MuJoCo HAPTIX: A virtual reality system for hand manipulation [C]// Proceedings of the 2015 IEEE-RAS 15th International Conference on Humanoid Robots. Piscataway: IEEE, 2015: 657-663. 10.1109/humanoids.2015.7363441 |
| 17 | AMOR H BEN, KROEMER O, HILLENBRAND U, et al. Generalization of human grasping for multi-fingered robot hands [C]// Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 2043-2050. 10.1109/iros.2012.6386072 |
| 18 | ROMERO J, KJELLSTROM H, KRAGIC D. Modeling and evaluation of human-to-robot mapping of grasps [C]// Proceedings of the 2009 IEEE International Conference on Advanced Robotics. Piscataway: IEEE, 2009: 1-6. |
| 19 | HERZOG A, PASTOR P, KALAKRISHNAN M, et al. Template-based learning of grasp selection [C]// Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2012: 2379-2384. 10.1109/icra.2012.6225271 |
| 20 | YANG Y, FERMÜLLER C, LI Y, et al. Grasp type revisited: A modern perspective on a classical feature vision [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 400-408. 10.1109/cvpr.2015.7298637 |
| 21 | NAKAMURA Y C, TRONIAK D M, RODRIGUEZ A, et al. The complexities of grasping in the wild [C]// Proceedings of the 2017 IEEE-RAS International Conference on Humanoid Robotics. Piscataway: IEEE, 2017: 233-240. 10.1109/humanoids.2017.8246880 |
| 22 | CUTKOSKY M R. On grasp choice, grasp models, and the design of hands for manufacturing tasks [J]. IEEE Transactions on Robotics and Automation, 1989, 5(3): 269-279. 10.1109/70.34763 |
| 23 | KAMAKURA N, MATSUO M, ISHII H, et al. Patterns of static prehension in normal hands [J]. The American Journal of Occupational Therapy, 1980, 34(7): 437-445. 10.5014/ajot.34.7.437 |
| 24 | TANG D, CHANG H J, TEJANI A, et al. Latent regression forest: Structured estimation of 3D articulated hand posture [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 3786-3793. 10.1109/cvpr.2014.490 |
| 25 | BALASUBRAMANIAN R, XU L, BROOK P D, et al. Physical human interactive guidance: Identifying grasping principles from human-planned grasps [J]. IEEE Transactions on Robotics, 2012, 28(4): 899-910. 10.1109/tro.2012.2189498 |
| 26 | TOMPSON J, STEIN M, LeCUN Y, et al. Real-time continuous pose recovery of human hands using convolutional networks [J]. ACM Transactions on Graphics, 2014, 33(5): No. 169. 10.1145/2629500 |
| 27 | BERNARDIN K, OGAWARA K, IKEUCHI K, et al. A sensor fusion approach for recognizing continuous human grasping sequences using hidden Markov models [J]. IEEE Transactions on Robotics and Automation, 2005, 21(1): 47-57. 10.1109/tro.2004.833816 |
| 28 | T-H PHAM, KYRIAZIS N, ARGYROS A A, et al. Hand-object contact force estimation from marker less visual tracking [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(12): 2883-2896. 10.1109/tpami.2017.2759736 |
| 29 | ROGEZ G, SUPANCIC J S, RAMANAN D, et al. Understanding everyday hands in action from RGB-D images [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 3889-3897. 10.1109/iccv.2015.443 |
| 30 | 尤晨晨.抓取数据集构建及未知物体抓取显著性预测[D].济南:山东大学, 2021. |
| YOU C C. Construction if grasping data set and prediction of grasping salience of unknown objects [D]. Jinan: Shandong University, 2021. | |
| 31 | BRAHMBHATT S, TANG C, TWIGG C D, et al. ContactPose: A dataset of grasps with object contact and hand pose [C]// Proceedings of the 2020 European Conference on Computer Vision. Cham: Springer, 2020: 361-378. 10.1007/978-3-030-58601-0_22 |
| 32 | LAU M, DEV K, SHI W, et al. Tactile mesh saliency [J]. ACM Transactions on Graphics, 2016, 35(4): No. 52. 10.1145/2897824.2925927 |
| 33 | ZHANG L-N, WANG Y, ZHOU J, et al. 3D grasp saliency analysis via deep shape correspondence [J]. Computer Aided Geometric Design, 2020, 81: 101901. 10.1016/j.cagd.2020.101901 |
| 34 | MILLER A T, ALLEN P K. Graspit! A versatile simulator for robotic grasping [J]. IEEE Robotics & Automation Magazine, 2004, 11(4): 110-122. 10.1109/mra.2004.1371616 |
| 35 | HAMER H, GALL J, WEISE T, et al. An object-dependent hand pose prior from sparse training data [C]// Proceedings of the 2010 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2010: 671-678. 10.1109/cvpr.2010.5540150 |
| 36 | JIANG Y, MOSESON S, SAXENA A. Efficient grasping from RGBD images: Learning using a new rectangle representation [C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 3304-3311. 10.1109/icra.2011.5980145 |
| 37 | PINTO L, GUPTA A, et al. Supersizing self-supervision: Learning to grasp from 50K tries and 700 robot hours [C]// Proceedings of the 2016 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2016: 3406-3413. 10.1109/icra.2016.7487517 |
| 38 | YAN X, HSU J, KHANSARI M, et al. Learning 6-DOF grasping interaction via deep geometry aware 3D representations [C]// Proceedings of the 2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2018: 3766-3773. 10.1109/icra.2018.8460609 |
| 39 | LWOWSKI J, MAJUMDAT A, BENAVIDEZ P, et al. HTC vive tracker: Accuracy for indoor location [J]. IEEE Systems, Man, and Cybernetics Magazine, 2020, 6(4): 15-22. 10.1109/msmc.2020.2969031 |
| 40 | QI C R, YI L, SU H, et al. PointNet++: Deep hierarchical feature learning on point sets in a metric space [C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| 41 | WELLING M, THE Y W. Bayesian learning via stochastic gradient Langevin dynamics [C]// Proceedings of the 28 th International Conference on Machine Learning. Madison: Omnipress, 2011: 681-688. |
| 42 | KIRKPATRICK S, GELATT C D, Jr, VECCHI M P. Optimization by simulated annealing [J]. Science, 1983, 220(4598): 671-680. 10.1126/science.220.4598.671 |
| [1] | 王杰科, 李琳, 张海龙, 郑利平. 虚拟现实大空间下多虚拟目标被动触觉交互方法[J]. 《计算机应用》唯一官方网站, 2022, 42(11): 3544-3550. |
| [2] | 侯守明, 贾超兰, 张明敏. 用于虚拟现实系统的眼动交互技术综述[J]. 《计算机应用》唯一官方网站, 2022, 42(11): 3534-3543. |
| [3] | 王毅, 吕健, 尤乾, 赵泽宇, 颜宝明, 朱姝蔓. 基于菲茨定律的虚拟现实任意形状选择模型[J]. 计算机应用, 2020, 40(11): 3320-3326. |
| [4] | 胡敏, 李冲, 路荣荣, 黄宏程. 基于三维视觉指导的运动想象训练性能分析[J]. 计算机应用, 2018, 38(3): 836-841. |
| [5] | 林畅, 李国平, 赵海武, 王国中, 顾晓. 全景视频双环带映射算法[J]. 计算机应用, 2017, 37(9): 2631-2635. |
| [6] | 吴赛文, 陈建, 孙晓颖. 面向视频感知的静电力触觉渲染方法[J]. 计算机应用, 2016, 36(4): 1137-1140. |
| [7] | 李丹妮, 刘奇, 田琪, 赵雷昱, 何凌, 黄韫栀, 张劲. 面向上颌骨骨折复位手术的虚拟系统设计[J]. 计算机应用, 2015, 35(6): 1730-1733. |
| [8] | 曹彦珏, 安博文, 李启明. 基于后处理的实时景深模拟与应用[J]. 计算机应用, 2015, 35(5): 1439-1443. |
| [9] | 杨晓文, 张志纯, 况立群, 韩燮. 基于虚拟手的人机交互关键技术[J]. 计算机应用, 2015, 35(10): 2945-2949. |
| [10] | 李艳军 李智勇 陈思远. 一种面向3D场景的实时自动路径搜索方法[J]. 计算机应用, 2010, 30(1): 85-89. |
| [11] | 丁欢 万旺根 余小清 谭小辉. 基于几何参数的植物真实感模拟[J]. 计算机应用, 2009, 29(1): 97-100. |
| [12] | 曾纪国 张艳 刘陈 战守义. 基于三幅图像的曲面造型及纹理提取[J]. 计算机应用, 2007, 27(2): 470-472. |
| [13] | 李峰 徐诚 郭凯 王亚平 . 虚拟样机模型转换及演示技术研究[J]. 计算机应用, 2006, 26(9): 2057-2058. |
| [14] | 黄俊莲 吕博学 . 虚拟现实中动画和碰撞的层次细节技术研究及应用[J]. 计算机应用, 2006, 26(11): 2730-2732. |
| [15] | 丘威,张立臣. 基于X3D的在线虚拟室内漫游系统的研究与应用[J]. 计算机应用, 2005, 25(08): 1930-1932. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||