


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (3): 931-937.DOI: 10.11772/j.issn.1001-9081.2023040420
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Yuliang ZHENG, Yunhua CHEN( ), Weijie BAI, Pinghua CHEN
), Weijie BAI, Pinghua CHEN
Received:2023-04-14
Revised:2023-07-24
Accepted:2023-07-26
Online:2023-12-04
Published:2024-03-10
Contact:
Yunhua CHEN
About author:ZHENG Yuliang, born in 1998, M. S. candidate. His research interests include event camera, object detection, image processing.Supported by:
郑宇亮, 陈云华(), 白伟杰, 陈平华
通讯作者:
陈云华
作者简介:郑宇亮(1998—),男,广东广州人,硕士研究生,CCF会员,主要研究方向:事件相机、目标检测、图像处理基金资助:CLC Number:
Yuliang ZHENG, Yunhua CHEN, Weijie BAI, Pinghua CHEN. Vehicle target detection by fusing event data and image frames[J]. Journal of Computer Applications, 2024, 44(3): 931-937.
郑宇亮, 陈云华, 白伟杰, 陈平华. 融合事件数据和图像帧的车辆目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 931-937.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023040420
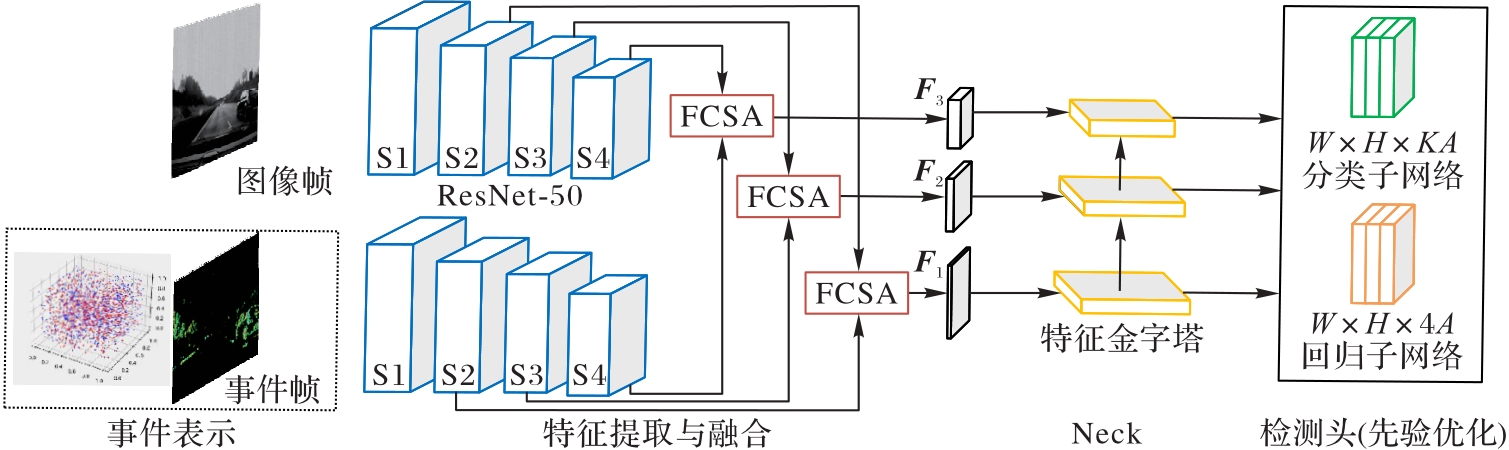
Fig. 1 Framework of fusion algorithm
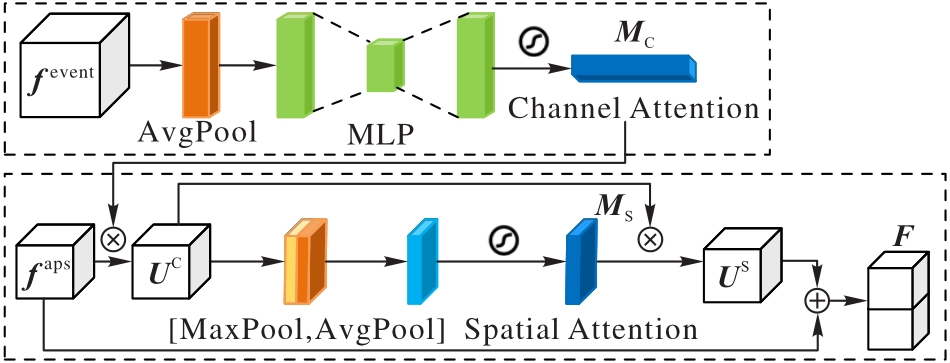
Fig. 2 Structure of FCSA

Fig. 3 Image samples of different recording scenes in MVSEC-CAR dataset
| 事件表示 | 输入 | PKU-DDD17-CAR | MVSEC-CAR |
|---|---|---|---|
| TS | Event | 44.7 | 35.3 |
| EF | Event | 44.8 | 37.9 |
| 本文算法 | Event | 45.8 | 41.3 |
Tab. 1 mAP results for different event representations
| 事件表示 | 输入 | PKU-DDD17-CAR | MVSEC-CAR |
|---|---|---|---|
| TS | Event | 44.7 | 35.3 |
| EF | Event | 44.8 | 37.9 |
| 本文算法 | Event | 45.8 | 41.3 |
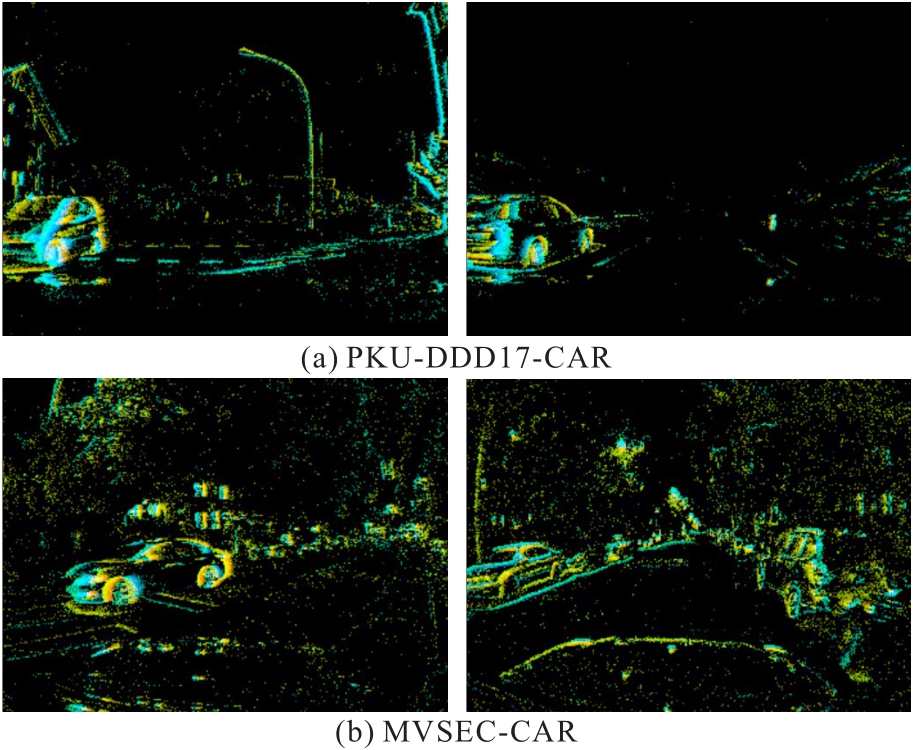
Fig.4 Three-channel spatiotemporal event representation based on event frequency and time surface
| 输入 | mAP/% | 帧率/(frame·s-1) | |
|---|---|---|---|
| PKU-DDD17-CAR | MVSEC-CAR | ||
| APS | 88.6 | 69.5 | 14 |
| Event | 45.8 | 41.3 | 14 |
| APS+Event | 89.5 | 71.3 | 12 |
Tab. 2 Detection results of fusion detection
| 输入 | mAP/% | 帧率/(frame·s-1) | |
|---|---|---|---|
| PKU-DDD17-CAR | MVSEC-CAR | ||
| APS | 88.6 | 69.5 | 14 |
| Event | 45.8 | 41.3 | 14 |
| APS+Event | 89.5 | 71.3 | 12 |
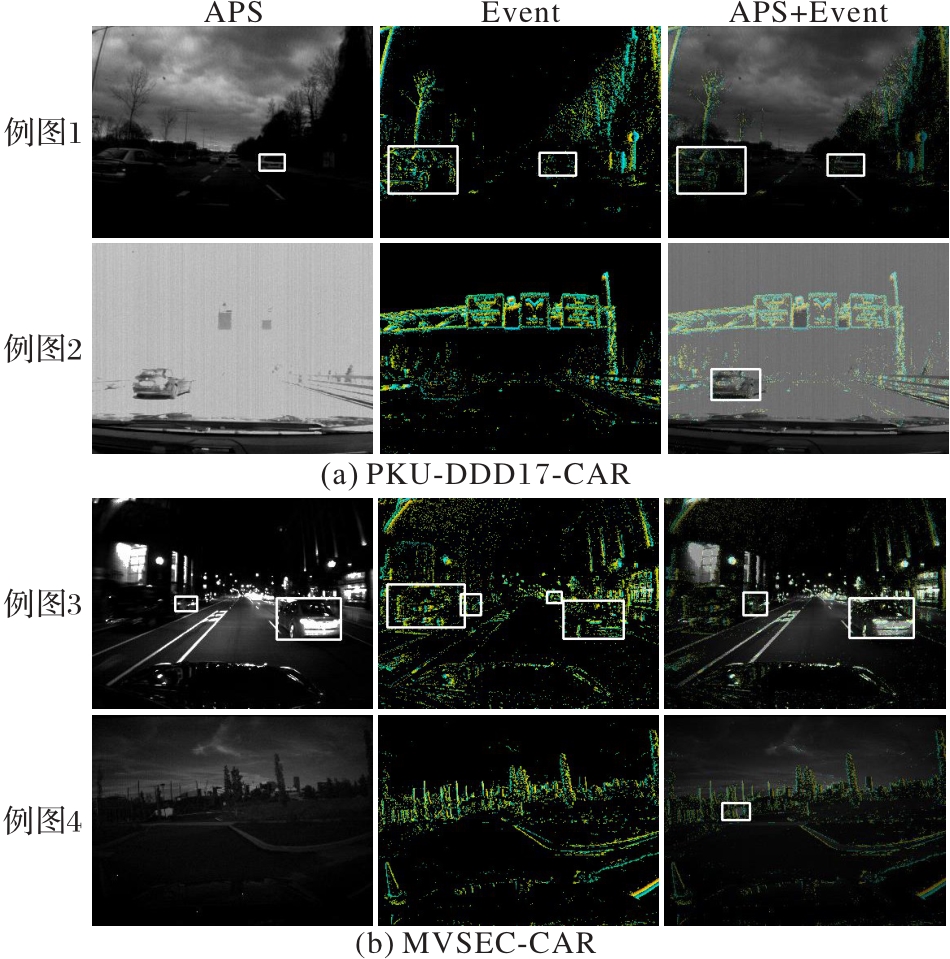
Fig. 5 Fusion detection results of proposed algorithm
| 序号 | 算法 | PKU-DDD17-CAR | MVSEC-CAR | ||
|---|---|---|---|---|---|
| mAP/% | 帧率/(frame·s-1) | mAP/% | 帧率/(frame·s-1) | ||
| 1 | None+Cat | 78.4 | 12 | 66.1 | 12 |
| 2 | Anchor_opt+Cat | 78.6 | 12 | 66.6 | 12 |
| 3 | None+FCSA | 86.1 | 12 | 69.7 | 12 |
| 4 | Anchor_opt+FCSA | 89.5 | 12 | 71.3 | 12 |
Tab. 3 Ablation experiment results of FCSA and anchor optimization
| 序号 | 算法 | PKU-DDD17-CAR | MVSEC-CAR | ||
|---|---|---|---|---|---|
| mAP/% | 帧率/(frame·s-1) | mAP/% | 帧率/(frame·s-1) | ||
| 1 | None+Cat | 78.4 | 12 | 66.1 | 12 |
| 2 | Anchor_opt+Cat | 78.6 | 12 | 66.6 | 12 |
| 3 | None+FCSA | 86.1 | 12 | 69.7 | 12 |
| 4 | Anchor_opt+FCSA | 89.5 | 12 | 71.3 | 12 |
| 算法 | 框架 | mAP/% | 帧率/(frame·s-1) | ||
|---|---|---|---|---|---|
| 日间 | 夜间 | 全部 | |||
| JDF[ | Faster-RCNN | 90.8 | 83.3 | 86.6 | 3 |
| SSD | — | — | 75.9 | 12 | |
| YOLOv2 | — | — | 77.8 | 15 | |
| YOLOv3 | — | — | 84.1 | 9 | |
| FAGC[ | RetinaNet | 80.5 | 86.2 | 81.6 | 8 |
| ADF[ | Gaussian-YOLOv3 | — | — | 86.9 | — |
| 本文算法 | RetinaNet | 89.8 | 89.4 | 89.5 | 12 |
Tab. 4 Comparison of experiment results among different algorithms
| 算法 | 框架 | mAP/% | 帧率/(frame·s-1) | ||
|---|---|---|---|---|---|
| 日间 | 夜间 | 全部 | |||
| JDF[ | Faster-RCNN | 90.8 | 83.3 | 86.6 | 3 |
| SSD | — | — | 75.9 | 12 | |
| YOLOv2 | — | — | 77.8 | 15 | |
| YOLOv3 | — | — | 84.1 | 9 | |
| FAGC[ | RetinaNet | 80.5 | 86.2 | 81.6 | 8 |
| ADF[ | Gaussian-YOLOv3 | — | — | 86.9 | — |
| 本文算法 | RetinaNet | 89.8 | 89.4 | 89.5 | 12 |
| 1 | MAO Q-C, SUN H-M, ZUO L-Q, et al. Finding every car: a traffic surveillance multi-scale vehicle object detection method [J]. Applied Intelligence, 2020, 50: 3125-3136. 10.1007/s10489-020-01704-5 |
| 2 | XIAO J, WU Y, CHEN Y, et al. LSTFE-Net: Long short-term feature enhancement network for video small object detection [C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 14613-14622. 10.1109/cvpr52729.2023.01404 |
| 3 | XIAO J, GUO H, ZHOU J, et al. Tiny object detection with context enhancement and feature purification [J]. Expert Systems with Applications, 2023, 211: 118665. 10.1016/j.eswa.2022.118665 |
| 4 | LICHTSTEINER P, POSCH C, DELBRUCK T. A 128×128 120 dB 15 µs latency asynchronous temporal contrast vision sensor [J]. IEEE Journal of Solid-State Circuits, 2008,43(2):566-576. 10.1109/jssc.2007.914337 |
| 5 | CHEN G, CAO H, CONRADT J, et al. Event-based neuromorphic vision for autonomous driving: a paradigm shift for bio-inspired visual sensing and perception[J]. IEEE Signal Processing Magazine, 2020,37(4):34-49. 10.1109/msp.2020.2985815 |
| 6 | ZHANG J, DONG B, ZHANG H, et al. Spiking transformers for event-based single object tracking [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 8791-8800. 10.1109/cvpr52688.2022.00860 |
| 7 | 蔡志浩,陈文军,赵江,等. 基于动态视觉传感器的无人机目标检测与避障[J/OL].北京航空航天大学学报,2022:1-15 [2023-12-15].. |
| CAI Z H, CHEN W J, ZHAO J, et al. Object detection and obstacle avoidance based on dynamic vision sensor for UAV [J/OL]. Journal of Beijing University of Aeronautics and Astronautics, 2022:1-15 [2023-12-15].. | |
| 8 | JIANG Z, XIA P, HUANG K, et al. Mixed frame-/event-driven fast pedestrian detection [C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 8332-8338. 10.1109/icra.2019.8793924 |
| 9 | LI J, DONG S, YU Z, et al. Event-based vision enhanced: A joint detection framework in autonomous driving [C]// Proceedings of the 2019 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2019: 1396-1401. 10.1109/icme.2019.00242 |
| 10 | CAO H, CHEN G, XIA J, et al. Fusion-based feature attention gate component for vehicle detection based on event camera [J]. IEEE Sensors Journal, 2021, 21(21): 24540-24548. 10.1109/jsen.2021.3115016 |
| 11 | LIU M, QI N, SHI Y, et al. An attention fusion network for event-based vehicle object detection [C]// Proceedings of the 2021 IEEE International Conference on Image Processing. Piscataway: IEEE, 2021: 3363-3367. 10.1109/icip42928.2021.9506561 |
| 12 | REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. (2018-04-08) [2023-04-13]. . 10.1109/cvpr.2017.690 |
| 13 | BENJDIRA B, KHURSHEED T, KOUBAA A, et al. Car detection using unmanned aerial vehicles: comparison between faster R-CNN and YOLOv3 [C]// Proceedings of the 2019 International Conference on Unmanned Vehicle Systems-Oman. Piscataway: IEEE, 2019: 1-6. 10.1109/uvs.2019.8658300 |
| 14 | BOX G E P, TIAO G C. Bayesian Inference in Statistical Analysis[M]. New York: John Wiley & Sons, 2011:149-316. |
| 15 | PAREDES-VALLÉS F, SCHEPER K Y W, DE CROON G C H E. Unsupervised learning of a hierarchical spiking neural network for optical flow estimation: from events to global motion perception[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(8): 2051-2064. 10.1109/tpami.2019.2903179 |
| 16 | TAVANAEI A, GHODRATI M, KHERADPISHEH S R, et al. Deep learning in spiking neural networks [J]. Neural Networks, 2019, 111: 47-63. 10.1016/j.neunet.2018.12.002 |
| 17 | LEE H, KWON H, ROBINSON R M, et al. Dynamic belief fusion for object detection [C]// Proceedings of the 2016 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2016: 1-9. 10.1109/wacv.2016.7477574 |
| 18 | LIN T-Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE,2017: 2999-3007. 10.1109/iccv.2017.324 |
| 19 | ANEESH A N, SHINE L, PRADEEP R, et al. Real-time traffic light detection and recognition based on deep RetinaNet for self driving cars [C]// Proceedings of the 2019 2nd International Conference on Intelligent Computing, Instrumentation and Control Technologies. Piscataway: IEEE, 2019: 1554-1557. 10.1109/icicict46008.2019.8993293 |
| 20 | HU J, SHEN L, SUN G. Squeeze-and-excitation networks [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. 10.1109/cvpr.2018.00745 |
| 21 | ZHU A Z, THAKUR D, ÖZASLAN T, et al. The multivehicle stereo event camera dataset: an event camera dataset for 3D perception [J]. IEEE Robotics and Automation Letters, 2018, 3(3): 2032-2039. 10.1109/lra.2018.2800793 |
| 22 | STORN R, PRICE K. Differential evolution — a simple and efficient heuristic for global optimization over continuous spaces[J]. Journal of Global Optimization, 1997, 11: 341-359. 10.1023/a:1008202821328 |
| 23 | POSCH C, MATOLIN D, WOHLGENANNT R. An asynchronous time-based image sensor [C]// Proceedings of the 2008 IEEE International Symposium on Circuits and Systems. Piscataway: IEEE, 2008: 2130-2133. 10.1109/iscas.2008.4541871 |
| 24 | BRANDLI C, BERNER R, YANG M H, et al. A 240×180 130 dB 3 μs latency global shutter spatiotemporal vision sensor[J]. IEEE Journal of Solid-State Circuits, 2014, 49(10):2333-2341. 10.1109/jssc.2014.2342715 |
| 25 | ANGOTZI G N, BOI F, LECOMTE A, et al. SiNAPS: an implantable active pixel sensor CMOS-probe for simultaneous large-scale neural recordings [J]. Biosensors and Bioelectronics, 2019, 126: 355-364. 10.1016/j.bios.2018.10.032 |
| 26 | MOEYS D P, CORRADI F, LI C, et al. A sensitive dynamic and active pixel vision sensor for color or neural imaging applications[J]. IEEE Transactions on Biomedical Circuits and Systems, 2017, 12(1): 123-136. 10.1109/tbcas.2017.2759783 |
| 27 | CHEN G, CAO H, YE C, et al. Multi-cue event information fusion for pedestrian detection with neuromorphic vision sensors[J]. Frontiers in Neurorobotics, 2019, 13: 10. 10.3389/fnbot.2019.00010 |
| 28 | BALDWIN R W, ALMATRAFI M, KAUFMAN J R, et al. Inceptive event time-surfaces for object classification using neuromorphic cameras [C]// Proceedings of the 2019 International Conference on Image Analysis and Recognition. Cham:Springer,2019:395-403. 10.1007/978-3-030-27272-2_35 |
| 29 | BINAS J, NEIL D, LIU S-C, et al. DDD17: end-to-end DAVIS driving dataset [EB/OL]. (2017-11-04) [2023-04-13]. . |
| 30 | WU W, LIU H, LI L, et al. Application of local fully convolutional neural network combined with YOLOv5 algorithm in small target detection of remote sensing image [J]. PLoS ONE, 2021, 16(10): e0259283. 10.1371/journal.pone.0259283 |
| [1] | Yexin PAN, Zhe YANG. Optimization model for small object detection based on multi-level feature bidirectional fusion [J]. Journal of Computer Applications, 2024, 44(9): 2871-2877. |
| [2] | Zhiqiang ZHAO, Peihong MA, Xinhong HEI. Crowd counting method based on dual attention mechanism [J]. Journal of Computer Applications, 2024, 44(9): 2886-2892. |
| [3] | Jing QIN, Zhiguang QIN, Fali LI, Yueheng PENG. Diagnosis of major depressive disorder based on probabilistic sparse self-attention neural network [J]. Journal of Computer Applications, 2024, 44(9): 2970-2974. |
| [4] | Liting LI, Bei HUA, Ruozhou HE, Kuang XU. Multivariate time series prediction model based on decoupled attention mechanism [J]. Journal of Computer Applications, 2024, 44(9): 2732-2738. |
| [5] | Kaipeng XUE, Tao XU, Chunjie LIAO. Multimodal sentiment analysis network with self-supervision and multi-layer cross attention [J]. Journal of Computer Applications, 2024, 44(8): 2387-2392. |
| [6] | Pengqi GAO, Heming HUANG, Yonghong FAN. Fusion of coordinate and multi-head attention mechanisms for interactive speech emotion recognition [J]. Journal of Computer Applications, 2024, 44(8): 2400-2406. |
| [7] | Zhonghua LI, Yunqi BAI, Xuejin WANG, Leilei HUANG, Chujun LIN, Shiyu LIAO. Low illumination face detection based on image enhancement [J]. Journal of Computer Applications, 2024, 44(8): 2588-2594. |
| [8] | Shangbin MO, Wenjun WANG, Ling DONG, Shengxiang GAO, Zhengtao YU. Single-channel speech enhancement based on multi-channel information aggregation and collaborative decoding [J]. Journal of Computer Applications, 2024, 44(8): 2611-2617. |
| [9] | Wu XIONG, Congjun CAO, Xuefang SONG, Yunlong SHAO, Xusheng WANG. Handwriting identification method based on multi-scale mixed domain attention mechanism [J]. Journal of Computer Applications, 2024, 44(7): 2225-2232. |
| [10] | Huanhuan LI, Tianqiang HUANG, Xuemei DING, Haifeng LUO, Liqing HUANG. Public traffic demand prediction based on multi-scale spatial-temporal graph convolutional network [J]. Journal of Computer Applications, 2024, 44(7): 2065-2072. |
| [11] | Dianhui MAO, Xuebo LI, Junling LIU, Denghui ZHANG, Wenjing YAN. Chinese entity and relation extraction model based on parallel heterogeneous graph and sequential attention mechanism [J]. Journal of Computer Applications, 2024, 44(7): 2018-2025. |
| [12] | Li LIU, Haijin HOU, Anhong WANG, Tao ZHANG. Generative data hiding algorithm based on multi-scale attention [J]. Journal of Computer Applications, 2024, 44(7): 2102-2109. |
| [13] | Song XU, Wenbo ZHANG, Yifan WANG. Lightweight video salient object detection network based on spatiotemporal information [J]. Journal of Computer Applications, 2024, 44(7): 2192-2199. |
| [14] | Dahai LI, Zhonghua WANG, Zhendong WANG. Dual-branch low-light image enhancement network combining spatial and frequency domain information [J]. Journal of Computer Applications, 2024, 44(7): 2175-2182. |
| [15] | Wenliang WEI, Yangping WANG, Biao YUE, Anzheng WANG, Zhe ZHANG. Deep learning model for infrared and visible image fusion based on illumination weight allocation and attention [J]. Journal of Computer Applications, 2024, 44(7): 2183-2191. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||