


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (9): 2904-2909.DOI: 10.11772/j.issn.1001-9081.2022091360
杨君宇1, 董岩1, 龙镇南1, 杨新2, 韩斌1( )
)
收稿日期:2022-09-20
修回日期:2022-10-31
接受日期:2022-11-02
发布日期:2023-01-16
出版日期:2023-09-10
通讯作者:
韩斌
作者简介:杨君宇(1997—),男,湖北荆门人,硕士,主要研究方向:机器视觉、图像处理基金资助:
Junyu YANG1, Yan DONG1, Zhennan LONG1, Xin YANG2, Bin HAN1()
Received:2022-09-20
Revised:2022-10-31
Accepted:2022-11-02
Online:2023-01-16
Published:2023-09-10
Contact:
Bin HAN
About author:YANG Junyu, born in 1997, M. S. His research interests include machine vision, image processing.Supported by:摘要:
图像除雨算法一般对单帧图像或视频流中的雨滴进行去除,以降低雨滴对视觉任务的不良影响。然而,由于雨滴下落速度极快,基于帧的相机无法获取雨滴在时间上的连续性,且相机的曝光时间和运动模糊进一步降低了图像中雨滴的清晰度,导致传统图像的除雨算法无法准确检出雨滴覆盖区域。为探究图像除雨的新思路,利用事件相机极高采样率、无运动模糊的特性,分析并建立了雨滴事件生成模型,并提出了基于时空关联性的事件相机雨滴检测算法。该算法通过分析事件相机记录下的每个事件与相邻事件之间的时空关系来对每个事件产生自雨滴运动的概率进行计算,从而实现雨滴检测。在三种降雨场景上的实验结果表明,在相机静止不动时,所提算法的雨滴检测正确率可达95%以上,误检率低于5%;当相机处于运动状态时,所提算法仍可达到95%以上的正确率与不超过20%的误检率。说明所提算法可有效检出雨滴。
中图分类号:
杨君宇, 董岩, 龙镇南, 杨新, 韩斌. 基于事件相机的雨滴检测算法[J]. 计算机应用, 2023, 43(9): 2904-2909.
Junyu YANG, Yan DONG, Zhennan LONG, Xin YANG, Bin HAN. Rain detection algorithm based on event camera[J]. Journal of Computer Applications, 2023, 43(9): 2904-2909.

图1 基于事件相机的雨滴检测
Fig. 1 Event camera based rain detection
| 相机参数 | 数值 | 含义 |
|---|---|---|
| diff | 299 | 事件对比度阈值中值 |
| diffon | 221 | 事件正极性阈值 |
| diffoff | 384 | 事件负极性阈值 |
| fo | 1 477 | 传感器带宽控制参数 |
| hpf | 1 499 | 滤除低频噪声参数 |
| refr | 1 500 | 像素不应期参数 |
表1 相机参数设置
Tab. 1 Camera parameter setting
| 相机参数 | 数值 | 含义 |
|---|---|---|
| diff | 299 | 事件对比度阈值中值 |
| diffon | 221 | 事件正极性阈值 |
| diffoff | 384 | 事件负极性阈值 |
| fo | 1 477 | 传感器带宽控制参数 |
| hpf | 1 499 | 滤除低频噪声参数 |
| refr | 1 500 | 像素不应期参数 |
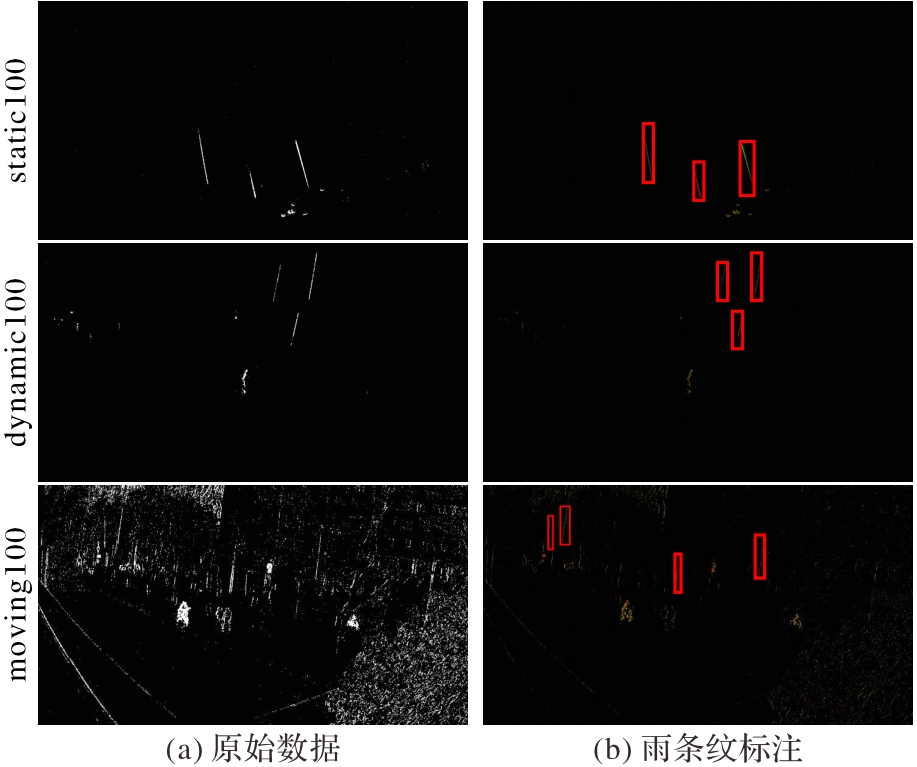
图2 降雨数据集场景与标注
Fig. 2 Scenes and labeling of rainfall datasets
| 数据集 | ev/seq | var |
|---|---|---|
| static100 | 2 370 | 130.31 |
| dynamic100 | 6 865 | 123.94 |
| moving100 | 512 224 | 721.92 |
表2 事件相机降雨数据集的基本统计信息
Tab. 2 Basic statistics of rainfall datasets based on event camera
| 数据集 | ev/seq | var |
|---|---|---|
| static100 | 2 370 | 130.31 |
| dynamic100 | 6 865 | 123.94 |
| moving100 | 512 224 | 721.92 |
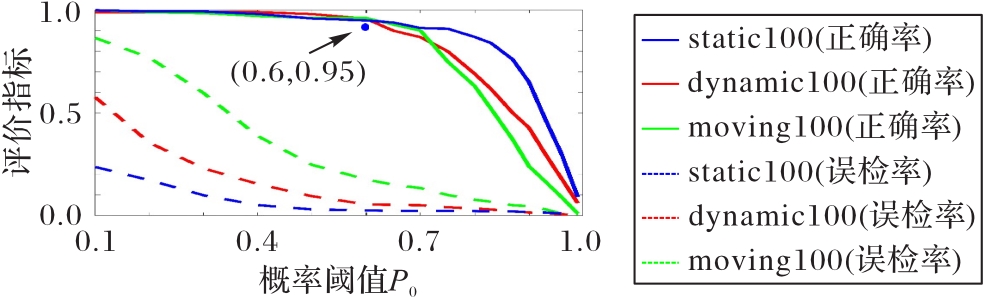
图3 TPR和FPR在不同概率阈值下的变化曲线
Fig. 3 Changing curves of TPR and FPR under different possibility thresholds
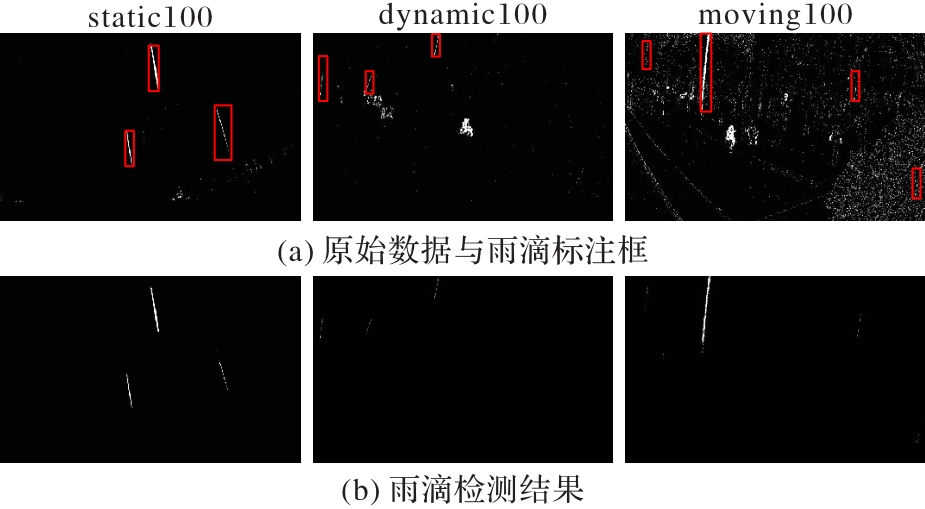
图4 三类场景下的雨滴检测结果
Fig. 4 Rain detection results in three scenes
| T/μs | static100 | dynamic100 | moving100 | ||||
|---|---|---|---|---|---|---|---|
| TPR | FPR | TPR | FPR | TPR | FPR | ||
| 2 000 | 1 | 0.761 | 0.010 | 0.584 | 0.073 | 0.878 | 0.135 |
| 2 | 0.951 | 0.076 | 0.916 | 0.102 | 0.953 | 0.330 | |
| 3 | 0.978 | 0.092 | 0.953 | 0.093 | 0.972 | 0.233 | |
| 4 | 0.989 | 0.090 | 0.981 | 0.071 | 0.960 | 0.220 | |
| 5 | 0.978 | 0.084 | 0.958 | 0.075 | 1.000 | 0.340 | |
| 6 | 0.951 | 0.057 | 0.930 | 0.083 | 1.000 | 0.388 | |
| 7 | 0.924 | 0.049 | 0.841 | 0.133 | 1.000 | 0.482 | |
| 400 | 4 | 0.647 | 0.014 | 0.678 | 0.098 | 0.712 | 0.144 |
| 800 | 0.891 | 0.026 | 0.888 | 0.098 | 0.944 | 0.158 | |
| 1 200 | 0.946 | 0.048 | 0.944 | 0.096 | 0.960 | 0.160 | |
| 1 600 | 0.978 | 0.073 | 0.958 | 0.092 | 0.957 | 0.198 | |
| 2 000 | 0.989 | 0.084 | 0.981 | 0.072 | 0.970 | 0.200 | |
| 2 400 | 0.988 | 0.103 | 0.968 | 0.078 | 0.960 | 0.225 | |
| 2 800 | 0.983 | 0.113 | 0.953 | 0.080 | 0.995 | 0.231 | |
| 3 600 | 0.989 | 0.121 | 0.949 | 0.082 | 1.000 | 0.273 | |
| 4 000 | 0.989 | 0.127 | 0.939 | 0.089 | 1.000 | 0.360 | |
表3 时空窗口对雨滴检测结果的影响
Tab. 3 Influence of spatial-temporal window sizes on rain detection results
| T/μs | static100 | dynamic100 | moving100 | ||||
|---|---|---|---|---|---|---|---|
| TPR | FPR | TPR | FPR | TPR | FPR | ||
| 2 000 | 1 | 0.761 | 0.010 | 0.584 | 0.073 | 0.878 | 0.135 |
| 2 | 0.951 | 0.076 | 0.916 | 0.102 | 0.953 | 0.330 | |
| 3 | 0.978 | 0.092 | 0.953 | 0.093 | 0.972 | 0.233 | |
| 4 | 0.989 | 0.090 | 0.981 | 0.071 | 0.960 | 0.220 | |
| 5 | 0.978 | 0.084 | 0.958 | 0.075 | 1.000 | 0.340 | |
| 6 | 0.951 | 0.057 | 0.930 | 0.083 | 1.000 | 0.388 | |
| 7 | 0.924 | 0.049 | 0.841 | 0.133 | 1.000 | 0.482 | |
| 400 | 4 | 0.647 | 0.014 | 0.678 | 0.098 | 0.712 | 0.144 |
| 800 | 0.891 | 0.026 | 0.888 | 0.098 | 0.944 | 0.158 | |
| 1 200 | 0.946 | 0.048 | 0.944 | 0.096 | 0.960 | 0.160 | |
| 1 600 | 0.978 | 0.073 | 0.958 | 0.092 | 0.957 | 0.198 | |
| 2 000 | 0.989 | 0.084 | 0.981 | 0.072 | 0.970 | 0.200 | |
| 2 400 | 0.988 | 0.103 | 0.968 | 0.078 | 0.960 | 0.225 | |
| 2 800 | 0.983 | 0.113 | 0.953 | 0.080 | 0.995 | 0.231 | |
| 3 600 | 0.989 | 0.121 | 0.949 | 0.082 | 1.000 | 0.273 | |
| 4 000 | 0.989 | 0.127 | 0.939 | 0.089 | 1.000 | 0.360 | |
| 1 | GARG K, NAYAR S K. Detection and removal of rain from videos[C]// Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition - Volume 1. Piscataway: IEEE, 2004: 528-535. |
| 2 | GARG K, NAYAR S K. Vision and rain[J]. International Journal of Computer Vision, 2007, 75(1):3-27. 10.1007/s11263-006-0028-6 |
| 3 | ZHANG X P, LI H, QI Y Y, et al. Rain removal in video by combining temporal and chromatic properties[C]// Proceedings of the 2006 IEEE International Conference on Multimedia and Expo. Piscataway: IEEE, 2006: 461-464. 10.1109/icme.2006.262572 |
| 4 | PAN Y, ZHANG L M. Roles of artificial intelligence in construction engineering and management: a critical review and future trends[J]. Automation in Construction, 2021, 122: No.103517. 10.1016/j.autcon.2020.103517 |
| 5 | SHASTRI B J, TAIT A N, FERREIRA DE LIMA T F, et al. Photonics for artificial intelligence and neuromorphic computing[J]. Nature Photonics, 2021, 15(2):102-114. 10.1038/s41566-020-00754-y |
| 6 | HEDRICK J K, SWAROOP D. Dynamic coupling in vehicles under automatic control[J]. Vehicle System Dynamics, 1994, 23(S1): 209-220. 10.1080/00423119308969516 |
| 7 | DELBRUCK T. Neuromorophic vision sensing and processing[C]// Proceedings of the 46th European Solid-State Device Research Conference. Piscataway: IEEE, 2016: 7-14. 10.1109/essderc.2016.7599576 |
| 8 | JIANG Z Y, XIA P F, HUANG K. Mixed frame-/event-driven fast pedestrian detection[C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 8332-8338. 10.1109/icra.2019.8793924 |
| 9 | ZHANG J Q, YANG X, FU Y K, et al. Object tracking by jointly exploiting frame and event domain[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 13023-13032. 10.1109/iccv48922.2021.01280 |
| 10 | SHAIR Z EL, RAWASHDEH S A. High-temporal-resolution object detection and tracking using images and events[J]. Journal of Imaging, 2022, 8(8): No.210. 10.3390/jimaging8080210 |
| 11 | YANG J Y. Rain detection dataset[EB/OL]. [2022-10-29].. |
| 12 | PARK W J, LEE K H. Rain removal using Kalman filter in video[C]// Proceedings of the 2008 International Conference on Smart Manufacturing Application. Piscataway: IEEE, 2008: 494-497. 10.1109/icsma.2008.4505573 |
| 13 | BEKKERMAN I, TABRIKIAN J. Target detection and localization using MIMO radars and sonars [J]. IEEE Transactions on Signal Processing, 2006, 54(10):3873-3883. 10.1109/tsp.2006.879267 |
| 14 | BOSSU J, HAUTIÈRE N, TAREL J P. Rain or snow detection in image sequences through use of a histogram of orientation of streaks[J]. International Journal of Computer Vision, 2011, 93(3):348-367. 10.1007/s11263-011-0421-7 |
| 15 | BARNUM P, KANADE T, NARASIMHAN S G. Spatio-temporal frequency analysis for removing rain and snow from videos[C/OL]// Proceedings of the 1st International Workshop on Photometric Analysis for Computer Vision [2022-10-29].. 10.1007/s11263-008-0200-2 |
| 16 | BARNUM P C, NARASIMHAN S, KANADE T. Analysis of rain and snow in frequency space[J]. International Journal of Computer Vision, 2010, 86(2/3):256-274. 10.1007/s11263-008-0200-2 |
| 17 | KIM J H, SIM J Y, KIM C S. Video deraining and desnowing using temporal correlation and low-rank matrix completion[J]. IEEE Transactions on Image Processing, 2015, 24(9): 2658-2670. 10.1109/tip.2015.2428933 |
| 18 | CHEN J, TAN C H, HOU J H, et al. Robust video content alignment and compensation for rain removal in a CNN framework[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018:6286-6295. 10.1109/cvpr.2018.00658 |
| 19 | LIU J Y, YANG W H, YANG S, et al. Erase or fill? deep joint recurrent rain removal and reconstruction in videos[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 3233-3242. 10.1109/cvpr.2018.00341 |
| 20 | XU J, ZHAO W, LIU P, et al. Removing rain and snow in a single image using guided filter[C]// Proceedings of the 2012 IEEE International Conference on Computer Science and Automation Engineering. Piscataway: IEEE, 2012:304-307. 10.1109/csae.2012.6272780 |
| 21 | XU J, ZHAO W, LIU P, et al. An improved guidance image based method to remove rain and snow in a single image[J]. Computer and Information Science, 2012, 5(3):49-55. 10.5539/cis.v5n3p49 |
| 22 | HOU M J, LIU R S, FAN X, et al. Joint residual learning for underwater image enhancement[C]// Proceedings of the 25th IEEE International Conference on Image Processing. Piscataway: IEEE, 2018:4043-4047. 10.1109/icip.2018.8451209 |
| 23 | ZHENG X H, LIAO Y H, GUO W, et al. Single-image-based rain and snow removal using multi-guided filter[C]// Proceedings of the 2013 International Conference on Neural Information Processing, LNCS 8228. Berlin: Springer, 2013:258-265. |
| 24 | FU Y H, KANG L W, LIN C W, et al. Single-frame-based rain removal via image decomposition[C]// Proceedings of the 2011 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway: IEEE, 2011:1453-1456. 10.1109/icassp.2011.5946766 |
| 25 | 徐成霞,阎庆,李腾,等. 基于联合注意力机制的单幅图像去雨算法[J]. 计算机应用, 2022, 42(8): 2578-2585. 10.11772/j.issn.1001-9081.2021061072 |
| XU C X, YAN Q, LI T, et al. De-raining algorithm based on joint attention mechanism for single image[J]. Journal of Computer Applications, 2022, 42(8): 2578-2585. 10.11772/j.issn.1001-9081.2021061072 | |
| 26 | GAUVAIN J L, LEE C H. Maximum a posteriori estimation for multivariate Gaussian mixture observations of Markov chains[J]. IEEE Transactions on Speech and Audio Processing, 1994, 2(2):291-298. 10.1109/89.279278 |
| 27 | ZHANG K, ZUO W M, GU S H, et al. Learning deep CNN denoiser prior for image restoration[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017:2808-2817. 10.1109/cvpr.2017.300 |
| 28 | EIGEN D, KRISHNAN D, FERGUS R. Restoring an image taken through a window covered with dirt or rain[C]// Proceedings of the 2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 633-640. 10.1109/iccv.2013.84 |
| 29 | FU X Y, HUANG J B, DING X H, et al. Clearing the skies: a deep network architecture for single-image rain removal[J]. IEEE Transactions on Image Processing, 2017, 26(6):2944-2956. 10.1109/tip.2017.2691802 |
| 30 | YANG W H, TAN R T, FENG J S, et al. Deep joint rain detection and removal from a single image[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017:1685-1694. 10.1109/cvpr.2017.183 |
| 31 | YANG W H, TAN R T, FENG J S, et al. Joint rain detection and removal from a single image with contextualized deep networks[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020, 42(6):1377-1393. 10.1109/tpami.2019.2895793 |
| 32 | 丁宇阳,李明悦,谢柠宇,等. 双 LSTM的光场图像去雨算法研究[J]. 计算机工程与应用, 2021, 57(18):227-237. 10.3778/j.issn.1002-8331.2009-0225 |
| DING Y Y, LI M Y, XIE N Y, et al. Research of dual LSTM method for rain streaks removal on light field images[J]. Computer Engineering and Applications, 2021, 57(18):227-237. 10.3778/j.issn.1002-8331.2009-0225 | |
| 33 | GALLEGO G, DELBRÜCK T, ORCHARD G, et al. Event-based vision: a survey[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(1):154-180. 10.1109/tpami.2020.3008413 |
| 34 | 华中科技大学. 一种基于事件相机的雨滴检测方法: 202210466828.0[P]. 2022-08-05. |
| Huazhong University of Science and Technology. An event camera based rain detection method: 202210466828.0[P]. 2022-08-05. | |
| 35 | FINATEU T, NIWA A, MATOLIN D, et al. 5.10 A 1280×720 back-illuminated stacked temporal contrast event-based vision sensor with 4.86µm pixels, 1.066GEPS readout, programmable event-rate controller and compressive data-formatting pipeline[C]// Proceedings of the 2020 IEEE International Solid-State Circuits Conference. Piscataway: IEEE, 2020:112-114. 10.1109/isscc19947.2020.9063149 |
| 36 | GUO S S, DELBRUCK T. Low cost and latency event camera background activity denoising[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(1): 785-795. 10.1109/tpami.2022.3152999 |
| 37 | LAGORCE X, ORCHARD G, GALLUPPI F, et al. HOTS: a hierarchy of event based time-surfaces for pattern recognition[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(7): 1346-1359. 10.1109/tpami.2016.2574707 |
| [1] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [2] | 张英俊, 李牛牛, 谢斌红, 张睿, 陆望东. 课程学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2326-2333. |
| [3] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [4] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [5] | 孙逊, 冯睿锋, 陈彦如. 基于深度与实例分割融合的单目3D目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2208-2215. |
| [6] | 姬张建, 杜娜. 基于改进VariFocalNet的微小目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2200-2207. |
| [7] | 刘越, 刘芳, 武奥运, 柴秋月, 王天笑. 基于自注意力机制与图卷积的3D目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1972-1977. |
| [8] | 刘源泂, 何茂征, 黄益斌, 钱程. 基于ResNet50和改进注意力机制的船舶识别模型[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1935-1941. |
| [9] | 邓亚平, 李迎江. YOLO算法及其在自动驾驶场景中目标检测综述[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1949-1958. |
| [10] | 耿焕同, 刘振宇, 蒋骏, 范子辰, 李嘉兴. 基于改进YOLOv8的嵌入式道路裂缝检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1613-1618. |
| [11] | 李鸿天, 史鑫昊, 潘卫国, 徐成, 徐冰心, 袁家政. 融合多尺度和注意力机制的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1437-1444. |
| [12] | 宋霄罡, 张冬冬, 张鹏飞, 梁莉, 黑新宏. 面向复杂施工环境的实时目标检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1605-1612. |
| [13] | 陈天华, 朱家煊, 印杰. 基于注意力机制的鸟类识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1114-1120. |
| [14] | 李新叶, 侯晔凝, 孔英会, 燕志旗. 结合特征融合与增强注意力的少样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 745-751. |
| [15] | 王伟, 赵春辉, 唐心瑶, 席刘钢. 自适应地平线约束下的车辆三维检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 909-915. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||