


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (11): 3396-3402.DOI: 10.11772/j.issn.1001-9081.2022101552
所属专题: 人工智能
李维刚1,2, 陈婷1( ), 田志强1
), 田志强1
收稿日期:2022-10-20
修回日期:2023-02-03
接受日期:2023-02-08
发布日期:2023-04-12
出版日期:2023-11-10
通讯作者:
陈婷
作者简介:李维刚(1977—),男,湖北咸宁人,教授,博士,主要研究方向:工业过程控制、人工智能、机器学习基金资助:
Weigang LI1,2, Ting CHEN1(), Zhiqiang TIAN1
Received:2022-10-20
Revised:2023-02-03
Accepted:2023-02-08
Online:2023-04-12
Published:2023-11-10
Contact:
Ting CHEN
About author:LI Weigang, born in 1977, Ph. D., professor. His research interests include industrial process control, artificial intelligence, machine learning.Supported by:摘要:
点云数据具有稀疏性、不规则性和置换不变性,缺乏拓扑信息,导致它的特征难以被提取,为此,提出一种孪生自适应图卷积算法(SAGCA)进行点云分类与分割。首先,构建特征关系图挖掘不规则、稀疏点云特征间的拓扑关系;其次,引入共享卷积学习权重的孪生构图思想,保证点云的置换不变性,使拓扑关系表达更准确;最后,采用整体、局部两种结合方式,将SAGCA与各种处理点云数据的深度学习网络相结合,增强网络的特征提取能力。分别在ScanObjectNN、ShapeNetPart和S3DIS数据集上进行分类、对象部件分割和场景语义分割实验的结果表明,相较于PointNet++基准网络,基于同样的数据集和评价标准,SAGCA分类实验的类别平均准确率(mAcc)提高了2.80个百分点,对象部件分割实验的总体类别平均交并比(IoU)提高了2.31个百分点,场景语义分割实验的类别平均交并比(mIoU)提高了2.40个百分点,说明SAGCA能有效增强网络的特征提取能力,适用于多种点云分类分割任务。
中图分类号:
李维刚, 陈婷, 田志强. 基于孪生自适应图卷积算法的点云分类与分割[J]. 计算机应用, 2023, 43(11): 3396-3402.
Weigang LI, Ting CHEN, Zhiqiang TIAN. Point cloud classification and segmentation based on Siamese adaptive graph convolution algorithm[J]. Journal of Computer Applications, 2023, 43(11): 3396-3402.

图1 SAGCA的结构及其与现有网络结合的框架
Fig. 1 Structure of SAGCA and framework of its combination with existing network
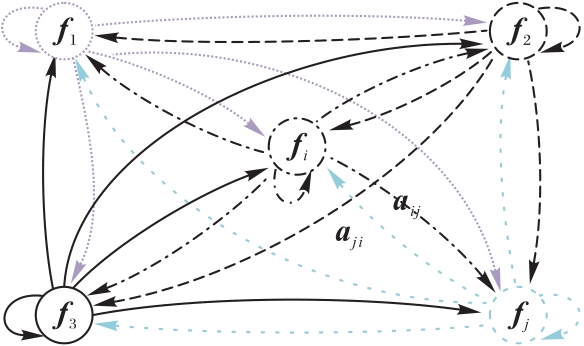
图2 有向的特征关系图
Fig. 2 Directed feature relationship graph
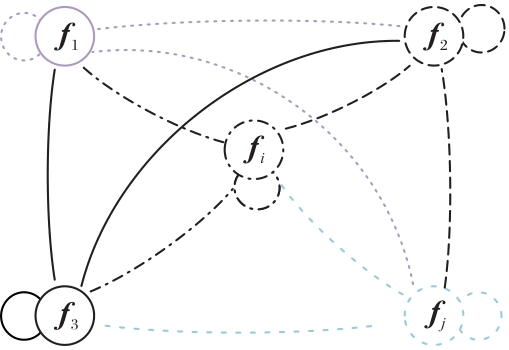
图3 无向的特征关系图
Fig. 3 Undirected feature relationship graph

图4 特征关系图
Fig. 4 Feature relationship graphs
| 方法 | OA/% | mAcc/% | GFLOPs | 推理速度/(sample·s-1) |
|---|---|---|---|---|
| PointNet[ | 68.20 | 63.40 | 0.45 | — |
| SpiderCNN[ | 73.70 | 69.80 | — | — |
| PointNet++[ | 77.90 | 75.40 | 0.87 | 120.35* |
| DGCNN[ | 78.10 | 73.60 | 2.43 | — |
| PointCNN[ | 78.50 | 75.10 | — | — |
| DRNet[ | 80.30 | 78.00 | — | — |
| MVTN+SimpleView++[ | 84.80 | — | — | — |
| Point-MAE[ | 85.20 | — | — | — |
| PointMLP[ | 85.70 | 84.40 | — | — |
| RepSurf-U‡[ | 86.00 | 83.10 | 2.45 | 92.79* |
| LSAGCA-PointNet++ | 79.89 | 78.20 | 3.71 | 70.94 |
| GSAGCA-PointNet++ | 79.89 | 77.78 | 0.91 | 104.15 |
| LSAGCA-RepSurf-U‡ | 86.40 | 84.93 | 11.68 | 56.66 |
| GSAGCA-RepSurf-U‡ | 86.50 | 85.69 | 2.87 | 84.78 |
表1 ScanObjectNN数据集上不同方法的分类性能对比
Tab. 1 Classification performance comparison of different methods on ScanObjectNN dataset
| 方法 | OA/% | mAcc/% | GFLOPs | 推理速度/(sample·s-1) |
|---|---|---|---|---|
| PointNet[ | 68.20 | 63.40 | 0.45 | — |
| SpiderCNN[ | 73.70 | 69.80 | — | — |
| PointNet++[ | 77.90 | 75.40 | 0.87 | 120.35* |
| DGCNN[ | 78.10 | 73.60 | 2.43 | — |
| PointCNN[ | 78.50 | 75.10 | — | — |
| DRNet[ | 80.30 | 78.00 | — | — |
| MVTN+SimpleView++[ | 84.80 | — | — | — |
| Point-MAE[ | 85.20 | — | — | — |
| PointMLP[ | 85.70 | 84.40 | — | — |
| RepSurf-U‡[ | 86.00 | 83.10 | 2.45 | 92.79* |
| LSAGCA-PointNet++ | 79.89 | 78.20 | 3.71 | 70.94 |
| GSAGCA-PointNet++ | 79.89 | 77.78 | 0.91 | 104.15 |
| LSAGCA-RepSurf-U‡ | 86.40 | 84.93 | 11.68 | 56.66 |
| GSAGCA-RepSurf-U‡ | 86.50 | 85.69 | 2.87 | 84.78 |
| 方法 | IoU/% | GFLOPs | 推理速度/(sample·s-1) | |
|---|---|---|---|---|
| 实例平均 | 类别平均 | |||
| PointNet[ | 83.70 | — | 4.10 | — |
| SPLATNet 3D[ | 84.60 | 82.00 | — | — |
| SSCNN[ | 84.70 | 82.00 | — | — |
| 3D-GCN[ | 85.10 | 82.10 | — | — |
| Point-PlaneNet[ | 85.10 | 82.50 | — | — |
| DGCNN[ | 85.20 | — | — | — |
| SpiderCNN[ | 85.30 | 82.40 | — | — |
| PointNet++(msg)[ | 85.10 | 81.90 | 4.92* | 69.98* |
| LSAGCA-PointNet++ | 85.42 | 84.08 | 15.06 | 51.07 |
| GSAGCA-PointNet++ | 85.43 | 84.21 | 5.02 | 68.66 |
表2 ShapeNetPart数据集上不同方法的对象部件分割性能对比
Tab. 2 Object part segmentation performance comparison of different methods on ShapeNetPart dataset
| 方法 | IoU/% | GFLOPs | 推理速度/(sample·s-1) | |
|---|---|---|---|---|
| 实例平均 | 类别平均 | |||
| PointNet[ | 83.70 | — | 4.10 | — |
| SPLATNet 3D[ | 84.60 | 82.00 | — | — |
| SSCNN[ | 84.70 | 82.00 | — | — |
| 3D-GCN[ | 85.10 | 82.10 | — | — |
| Point-PlaneNet[ | 85.10 | 82.50 | — | — |
| DGCNN[ | 85.20 | — | — | — |
| SpiderCNN[ | 85.30 | 82.40 | — | — |
| PointNet++(msg)[ | 85.10 | 81.90 | 4.92* | 69.98* |
| LSAGCA-PointNet++ | 85.42 | 84.08 | 15.06 | 51.07 |
| GSAGCA-PointNet++ | 85.43 | 84.21 | 5.02 | 68.66 |

图5 ShapeNetPart数据集上的对象部件分割可视化结果
Fig. 5 Visualization results of object part segmentation on ShapeNetPart dataset
| 方法 | mIoU/% | GFLOPs | 推理速度/(sample·s-1) |
|---|---|---|---|
| PointNet[ | 41.10 | 4.10 | — |
| SegCloud[ | 48.90 | — | — |
| DeepGCN[ | 52.49 | — | — |
| PointNet++[ | 52.70* | 0.80* | 43.84* |
| 3D-GCN[ | 53.40 | — | — |
| LSAGCA-PointNet++ | 54.76 | 3.44 | 34.76 |
| GSAGCA-PointNet++ | 55.10 | 1.14 | 41.28 |
表3 S3DIS-Area5数据集上不同方法的场景语义分割性能对比
Tab. 3 Scene semantic segmentation performance comparison of different methods on S3DIS-Area5 dataset
| 方法 | mIoU/% | GFLOPs | 推理速度/(sample·s-1) |
|---|---|---|---|
| PointNet[ | 41.10 | 4.10 | — |
| SegCloud[ | 48.90 | — | — |
| DeepGCN[ | 52.49 | — | — |
| PointNet++[ | 52.70* | 0.80* | 43.84* |
| 3D-GCN[ | 53.40 | — | — |
| LSAGCA-PointNet++ | 54.76 | 3.44 | 34.76 |
| GSAGCA-PointNet++ | 55.10 | 1.14 | 41.28 |

图6 S3DIS-Area5数据集上的场景语义分割可视化结果
Fig. 6 Visualization results of scene semantic segmentation on S3DIS-Area5 dataset
| 方法 | 是否共享卷积的权重 | mIoU |
|---|---|---|
| PointNet++基准网络 | 否 | 52.70* |
| LAGCA | 否 | 52.30 |
| LAGCA | 是 | 54.76 |
| GAGCA | 否 | 53.46 |
| GAGCA | 是 | 55.10 |
表4 S3DIS-Area5数据集上的消融实验结果 ( %)
Tab. 4 Experimental results of ablation on S3DIS-Area5 dataset
| 方法 | 是否共享卷积的权重 | mIoU |
|---|---|---|
| PointNet++基准网络 | 否 | 52.70* |
| LAGCA | 否 | 52.30 |
| LAGCA | 是 | 54.76 |
| GAGCA | 否 | 53.46 |
| GAGCA | 是 | 55.10 |
| 1 | 李朝,兰海,魏宪. 基于注意力的毫米波-激光雷达融合目标检测[J]. 计算机应用, 2021, 41(7): 2137-2144. 10.11772/j.issn.1001-9081.2020081334 |
| LI C, LAN H, WEI X. Attention-based object detection with millimeter wave radar-lidar fusion[J]. Journal of Computer Applications, 2021, 41(7): 2137-2144. 10.11772/j.issn.1001-9081.2020081334 | |
| 2 | 付豪,徐和根,张志明,等. 动态场景下基于语义和光流约束的视觉同步定位与地图构建[J]. 计算机应用, 2021, 41(11): 3337-3344. 10.11772/j.issn.1001-9081.2021010003 |
| FU H, XU H G, ZHANG Z M, et al. Visual simultaneous localization and mapping based on semantic and optical flow constraints in dynamic scenes[J]. Journal of Computer Applications, 2021, 41(11): 3337-3344. 10.11772/j.issn.1001-9081.2021010003 | |
| 3 | FAN T, ZHANG R. Research on automatic lane line extraction method based on onboard lidar point cloud data[C]// Proceedings of the SPIE 12306, 2nd International Conference on Digital Signal and Computer Communications. Bellingham, WA: SPIE, 2022: No.123060P. 10.1117/12.2641593 |
| 4 | MIRZAEI K, ARASHPOUR M, ASADI E, et al. 3D point cloud data processing with machine learning for construction and infrastructure applications: a comprehensive review[J]. Advanced Engineering Informatics, 2022, 51: No.101501. 10.1016/j.aei.2021.101501 |
| 5 | XU Y, FAN T, XU M, et al. SpiderCNN: deep learning on point sets with parameterized convolutional filters[C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11212. Cham: Springer, 2018: 90-105. |
| 6 | LI Y, BU R, SUN M, et al. PointCNN: convolution on X-transformed points[C]// Proceedings of the 32nd International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2018: 828-838. |
| 7 | QIU S, ANWAR S, BARNES N. Dense-resolution network for point cloud classification and segmentation[C]// Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2021: 3812-3821. 10.1109/wacv48630.2021.00386 |
| 8 | 史怡,魏东,宋强,等. 基于动态图卷积和离散哈特莱转换差异性池化的点云数据分类分割网络[J]. 计算机应用, 2022, 42(S1): 292-297. |
| SHI Y, WEI D, SONG Q, et al. Point cloud data classification and segmentation network based on dynamic graph convolution and discrete Hartley transform different pooling[J]. Journal of Computer Applications, 2021, 42(S1): 292-297. | |
| 9 | SU H, JAMPANI V, SUN D, et al. SPLATNet: sparse lattice networks for point cloud processing[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 2530-2539. 10.1109/cvpr.2018.00268 |
| 10 | YI L, SU H, GUO X, et al. SyncSpecCNN: synchronized spectral CNN for 3D shape segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6584-6592. 10.1109/cvpr.2017.697 |
| 11 | PEYGHAMBARZADEH S M M, AZIZMALAYERI F, KHOTANLOU H, et al. Point-PlaneNet: plane kernel based convolutional neural network for point clouds analysis[J]. Digital Signal Processing, 2020, 98: No.102633. 10.1016/j.dsp.2019.102633 |
| 12 | TCHAPMI L, CHOY C, ARMENI I, et al. SEGCloud: semantic segmentation of 3D point clouds[C]// Proceedings of the 2017 International Conference on 3D Vision. Piscataway: IEEE, 2017: 537-547. 10.1109/3dv.2017.00067 |
| 13 | LIN Z H, HUANG S Y, WANG Y C F. Convolution in the cloud: learning deformable kernels in 3D graph convolution networks for point cloud analysis[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 1897-1806. 10.1109/cvpr42600.2020.00187 |
| 14 | ZHOU Y, TUZEL O. VoxelNet: end-to-end learning for point cloud based 3D object detection[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 4490-4499. 10.1109/cvpr.2018.00472 |
| 15 | SHESHAPPANAVAR S V, KAMBHAMETTU C. SimpleView++: neighborhood views for point cloud classification[C]// Proceedings of the IEEE 5th International Conference on Multimedia Information Processing and Retrieval. Piscataway: IEEE, 2022: 31-34. 10.1109/mipr54900.2022.00013 |
| 16 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. 10.1109/cvpr.2017.16 |
| 17 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017: 5105-5114. |
| 18 | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. 10.1145/3326362 |
| 19 | QIAN G, LI Y, PENG H, et al. PointNeXt: revisiting PointNet++ with improved training and scaling strategies[EB/OL]. (2022-10-12) [2022-12-29].. |
| 20 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017: 6000-6010. |
| 21 | RAN H, LIU J, WANG C. Surface representation for point clouds[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 18942-18952. 10.1109/cvpr52688.2022.01837 |
| 22 | SCARSELLI F, GORI M, TSOI A C, et al. The graph neural network model[J]. IEEE Transactions on Neural Networks, 2008, 20(1): 61-80. 10.1109/tnn.2008.2005605 |
| 23 | KIPF T N, WELLING M. Semi-supervised classification with graph convolutional networks[EB/OL]. (2017-02-22) [2022-08-24].. 10.48550/arXiv.1609.02907 |
| 24 | LI G, MÜLLER M, QIAN G, et al. DeepGCNs: making GCNs go as deep as CNNs[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(6): 6923-6939. 10.1109/tpami.2021.3074057 |
| 25 | SHI L, ZHANG Y, CHENG J, et al. Non-local graph convolutional networks for skeleton-based action recognition[EB/OL]. [2022-08-24].. 10.1109/cvpr.2019.01230 |
| 26 | UY M A, PHAM Q H, HUA B S, et al. Revisiting point cloud classification: a new benchmark dataset and classification model on real-world data[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 1588-1597. 10.1109/iccv.2019.00167 |
| 27 | CHANG A X, FUNKHOUSER T, GUIBAS L, et al. ShapeNet: an information-rich 3D model repository[EB/OL]. [2022-08-25].. |
| 28 | ARMENI I, SENER O, ZAMIR A R, et al. 3D semantic parsing of large-scale indoor spaces[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1534-1543. 10.1109/cvpr.2016.170 |
| 29 | PASZKE A, GROSS S, CHINTALA S, et al. Automatic differentiation in PyTorch[EB/OL]. [2023-01-01].. |
| 30 | PANG Y, WANG W, TAY F E H, et al. Masked autoencoders for point cloud self-supervised learning[C]// Proceedings of the 2022 European Conference on Computer Vision, LNCS 13662. Cham: Springer, 2022: 604-621. |
| 31 | MA X, QIN C, YOU H, et al. Rethinking network design and local geometry in point cloud: a simple residual MLP framework[EB/OL]. [2023-01-01].. |
| [1] | 黄颖, 杨佳宇, 金家昊, 万邦睿. 用于RGBT跟踪的孪生混合信息融合算法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2878-2885. |
| [2] | 黄于欣, 徐佳龙, 余正涛, 侯书楷, 周家啟. 基于生成提示的无监督文本情感转换方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2667-2673. |
| [3] | 孙淳, 胡春龙, 黄树成. 一致性保留的集成排序年龄估计方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2381-2386. |
| [4] | 冷强奎, 孙薛梓, 孟祥福. 基于样本势和噪声进化的不平衡数据过采样方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2466-2475. |
| [5] | 张全梅, 黄润萍, 滕飞, 张海波, 周南. 融合异构信息的自动国际疾病分类编码方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2476-2482. |
| [6] | 李晨倩, 刘俊. 基于半监督和多尺度级联注意力的超声颈动脉斑块分割方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2604-2610. |
| [7] | 熊武, 曹从军, 宋雪芳, 邵云龙, 王旭升. 基于多尺度混合域注意力机制的笔迹鉴别方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2225-2232. |
| [8] | 王东炜, 刘柏辰, 韩志, 王艳美, 唐延东. 基于低秩分解和向量量化的深度网络压缩方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 1987-1994. |
| [9] | 葛焌迟, 赵为华. 矩阵数据基于鲁棒主成分分析的距离加权判别分析[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2073-2079. |
| [10] | 孙逊, 冯睿锋, 陈彦如. 基于深度与实例分割融合的单目3D目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2208-2215. |
| [11] | 陆潜慧, 张羽, 王梦灵, 吴庭伟, 单玉忠. 基于改进循环池化网络的核电装备质量文本分类模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2034-2040. |
| [12] | 孔哲, 李寒, 甘少伟, 孔明茹, 何冰涛, 郭子钰, 金督程, 邱兆文. 基于非对称多解码器和注意力模块的三维肾脏影像结构分割模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2216-2224. |
| [13] | 姚迅, 秦忠正, 杨捷. 生成式标签对抗的文本分类模型[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1781-1785. |
| [14] | 李焱, 潘大志, 郑思情. 多车场带时间窗车辆路径问题的改良自适应大邻域搜索算法[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1897-1904. |
| [15] | 袁子璇, 翁小清, 戈宁振. 基于正交局部保持映射和成本优化的多变量时间序列早期分类模型[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1832-1841. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||