


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (12): 3833-3839.DOI: 10.11772/j.issn.1001-9081.2022121916
所属专题: 先进计算
邓辅秦1,2, 黄焕钊1, 谭朝恩1, 付兰慧1, 张建民1, 林天麟2( )
)
收稿日期:2023-01-04
修回日期:2023-02-21
接受日期:2023-02-22
发布日期:2023-03-07
出版日期:2023-12-10
通讯作者:
林天麟
作者简介:邓辅秦(1982—),男,湖南郴州人,高级工程师,博士,主要研究方向:机器学习、移动机器人系统与多机器人系统基金资助:
Fuqin DENG1,2, Huanzhao HUANG1, Chaoen TAN1, Lanhui FU1, Jianmin ZHANG1, Tinlun LAM2()
Received:2023-01-04
Revised:2023-02-21
Accepted:2023-02-22
Online:2023-03-07
Published:2023-12-10
Contact:
Tinlun LAM
About author:DENG Fuqin, born in 1982, Ph. D., senior engineer. His research interests include machine learning, mobile robotic systems and multi-robot systems.Supported by:摘要:
研究多机器人任务分配(MRTA)的目的是提高智能工厂中机器人完成任务的效率。针对现有算法在处理大规模、多约束的MRTA时存在不足的问题,提出一种结合遗传算法和滚动调度的MRTA算法(ACGARS)。首先,在遗传算法中采用基于有向无环图(DAG)的编码方式高效地处理任务之间的优先级约束;其次,在遗传算法的初始种群中加入先验知识以提高算法的搜索效率;最后,设计基于任务组的滚动调度策略用于减小求解问题的规模,从而实现对大规模问题的高效求解。在大规模问题实例上的实验结果表明,相较于构造性启发式算法(CHA)、最小化干扰算法(MIA)和基于惩罚策略的遗传算法(GAPS)生成的方案,当任务组数为20时,所提算法生成的方案的平均订单完成时间分别缩短了30.02%、16.86%和75.65%,验证了所提算法能有效地缩短订单的平均等待时间,提升多机器人任务分配效率。
中图分类号:
邓辅秦, 黄焕钊, 谭朝恩, 付兰慧, 张建民, 林天麟. 结合遗传算法和滚动调度的多机器人任务分配算法[J]. 计算机应用, 2023, 43(12): 3833-3839.
Fuqin DENG, Huanzhao HUANG, Chaoen TAN, Lanhui FU, Jianmin ZHANG, Tinlun LAM. Multi-robot task allocation algorithm combining genetic algorithm and rolling scheduling[J]. Journal of Computer Applications, 2023, 43(12): 3833-3839.
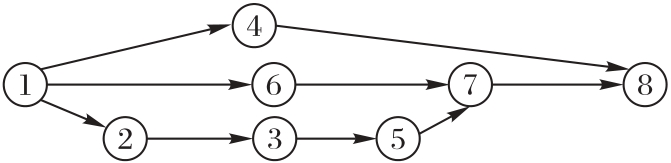
图1 代表一个任务组的DAG
Fig.1 DAG representing one task group
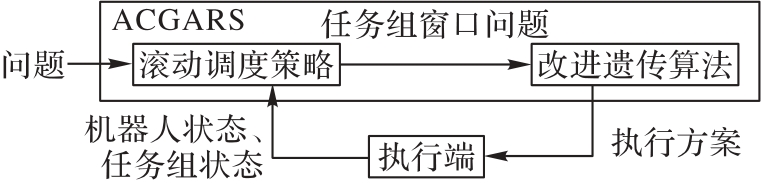
图2 本文算法的整体框架
Fig.2 Overall framework of proposed algorithm
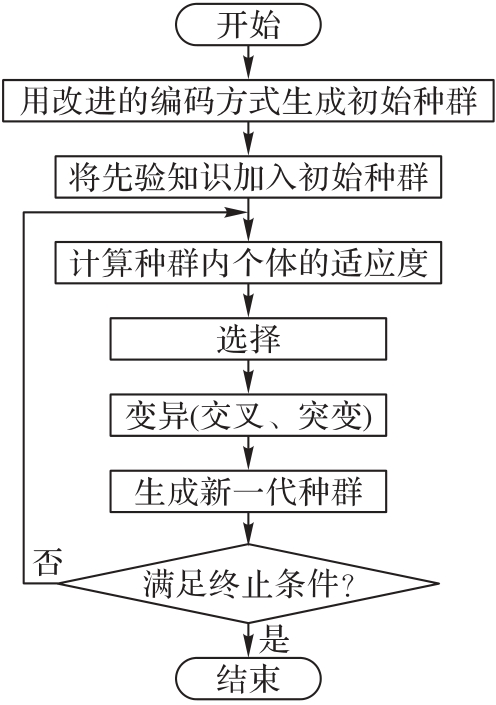
图3 改进遗传算法的流程
Fig.3 Flowchart of improved genetic algorithm
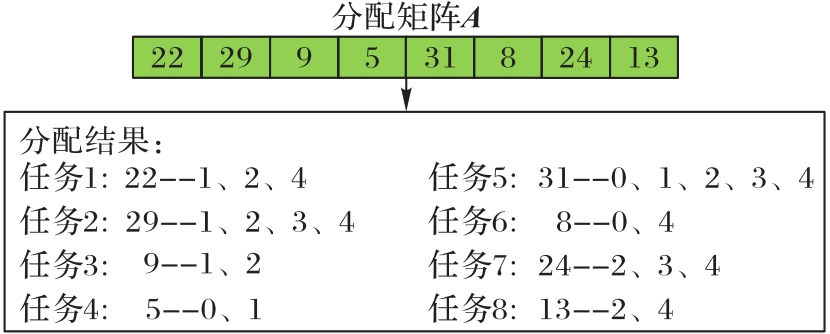
图4 分配矩阵确定执行任务的机器人团队示例
Fig. 4 Example of assignment matrix to determine robot team to perform task
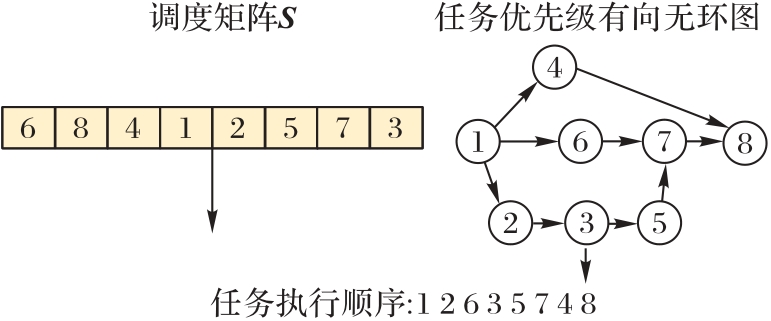
图5 根据DAG与调度矩阵确定任务的执行顺序示例
Fig.5 Example of determination of task execution order according to DAG and scheduling matrix
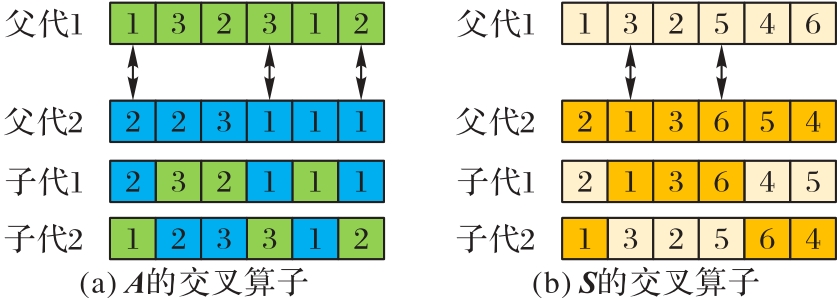
图6 交叉算子示意图
Fig. 6 Schematic diagram of crossover operator

图7 突变算子示意图
Fig. 7 Schematic diagram of mutation operator
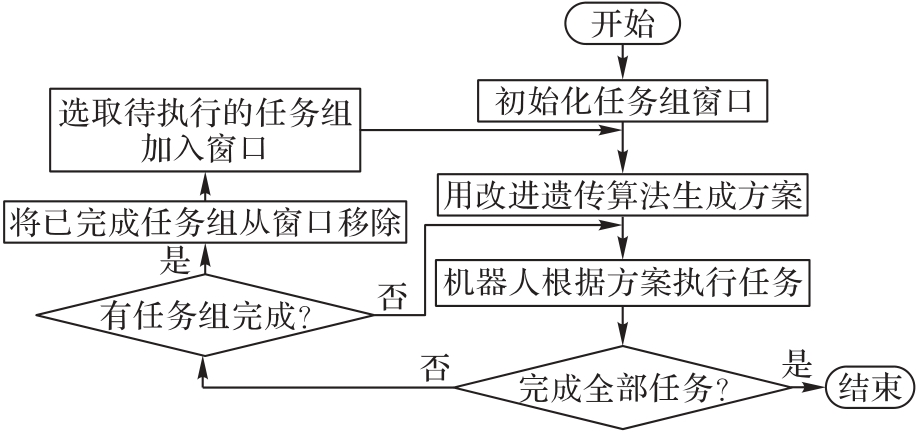
图8 基于任务组窗口的滚动调度策略的流程
Fig.8 Flowchart of rolling scheduling strategy based on task group window
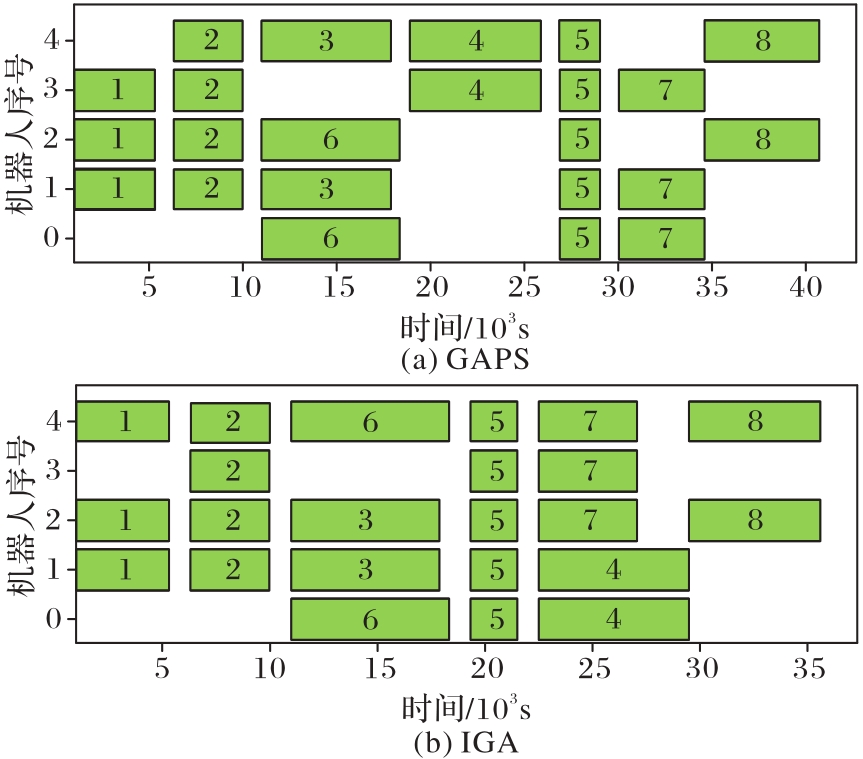
图9 两个算法生成方案对应的甘特图
Fig. 9 Gantt charts corresponding to schemes generated by two algorithms
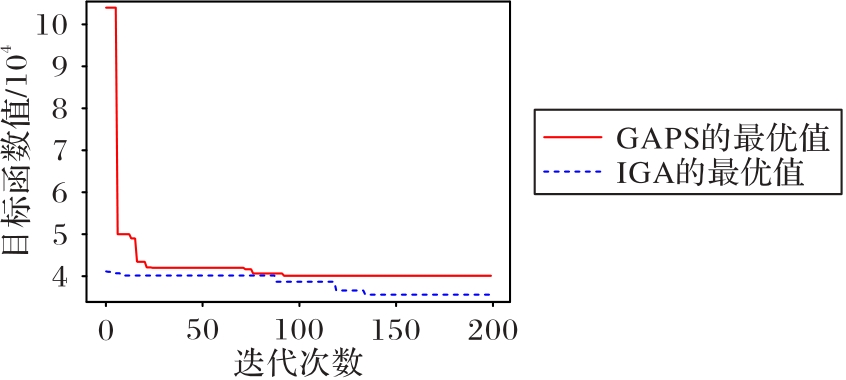
图10 两个算法迭代过程中目标函数最优值的变化
Fig.10 Changes of optimal values of objective functions of two algorithms in iteration process
| 算法 | 任务组数 | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| CHA | 38 678.50 | 58 228.92 | 82 433.61 |
| MIA | 37 953.50 | 56 144.08 | 77 166.72 |
| GAPS | 37 496.83 | 67 530.50 | 108 314.50 |
| IGA | 36 203.50 | 50 167.75 | 67 087.33 |
| IGAPK | 36 203.50 | 49 152.75 | 65 987.72 |
表1 小规模问题上不同算法的目标函数值对比
Tab.1 Comparison of objective function values of different algorithms on small-scale problems
| 算法 | 任务组数 | ||
|---|---|---|---|
| 1 | 2 | 3 | |
| CHA | 38 678.50 | 58 228.92 | 82 433.61 |
| MIA | 37 953.50 | 56 144.08 | 77 166.72 |
| GAPS | 37 496.83 | 67 530.50 | 108 314.50 |
| IGA | 36 203.50 | 50 167.75 | 67 087.33 |
| IGAPK | 36 203.50 | 49 152.75 | 65 987.72 |
| 算法 | 任务组数 | ||
|---|---|---|---|
| 10 | 15 | 20 | |
| CHA | 65 954.75 | 92 442.40 | 117 752.35 |
| MIA | 58 504.18 | 80 602.80 | 99 117.29 |
| GAPS | 137 600.00 | 217 680.00 | 338 400.00 |
| IGAPK | 56 811.92 | 80 428.98 | 98 505.98 |
| ACGARS | 48 312.18 | 66 724.49 | 82 405.81 |
表2 大规模问题上不同算法的目标函数值对比
Tab.2 Comparison of objective function values of different algorithms on large-scale problems
| 算法 | 任务组数 | ||
|---|---|---|---|
| 10 | 15 | 20 | |
| CHA | 65 954.75 | 92 442.40 | 117 752.35 |
| MIA | 58 504.18 | 80 602.80 | 99 117.29 |
| GAPS | 137 600.00 | 217 680.00 | 338 400.00 |
| IGAPK | 56 811.92 | 80 428.98 | 98 505.98 |
| ACGARS | 48 312.18 | 66 724.49 | 82 405.81 |
| 算法 | 任务组数 | ||
|---|---|---|---|
| 10 | 15 | 20 | |
| CHA | 0.12 | 0.30 | 0.59 |
| MIA | 0.13 | 0.33 | 0.64 |
| GAPS | 230.62 | 549.68 | 1 364.92 |
| IGAPK | 266.77 | 708.49 | 1 447.31 |
| ACGARS | 63.89 | 99.63 | 118.47 |
表3 大规模问题上不同算法的CPU耗时对比 (s)
Tab.3 Comparison of CPU time consumption of different algorithms on large-scale problems
| 算法 | 任务组数 | ||
|---|---|---|---|
| 10 | 15 | 20 | |
| CHA | 0.12 | 0.30 | 0.59 |
| MIA | 0.13 | 0.33 | 0.64 |
| GAPS | 230.62 | 549.68 | 1 364.92 |
| IGAPK | 266.77 | 708.49 | 1 447.31 |
| ACGARS | 63.89 | 99.63 | 118.47 |
| 1 | LI X, LI D, WAN J, et al. A review of industrial wireless networks in the context of Industry 4.0 [J]. Wireless Networks, 2017, 23(1): 23-41. 10.1007/s11276-015-1133-7 |
| 2 | LIANG G, LUO H, LI M, et al. FreeBOT: a freeform modular self-reconfigurable robot with arbitrary connection point-design and implementation[C]// Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2020: 6506-6513. 10.1109/iros45743.2020.9341129 |
| 3 | CHEN K-C, LIN S-C, J-H HSIAO, et al. Wireless networked multirobot systems in smart factories [J]. Proceedings of the IEEE, 2020, 109(4): 468-494. 10.1109/jproc.2020.3033753 |
| 4 | WANG S, WAN J, ZHANG D, et al. Towards smart factory for industry 4.0: a self-organized multi-agent system with big data based feedback and coordination [J]. Computer Networks, 2016, 101: 158-168. 10.1016/j.comnet.2015.12.017 |
| 5 | FECZKO J, MANKA M, KROL P, et al. Review of the modular self reconfigurable robotic systems[C]// Proceedings of the 2015 10th International Workshop on Robot Motion and Control. Piscataway: IEEE, 2015: 182-187. 10.1109/romoco.2015.7219733 |
| 6 | 赵辉,郝梦雅,王红君,等. 基于资源拍卖的农业多机器人任务分配[J].计算机应用与软件,2021,38(12):286-290,313. 10.3969/j.issn.1000-386x.2021.12.046 |
| ZHAO H, HAO M Y, WANG H J, et al. Cooperative task allocation of agricultural multi-robot based on resource auction[J]. Computer Applications and Software, 2021,38(12):286-290,313. 10.3969/j.issn.1000-386x.2021.12.046 | |
| 7 | KIM J, SON H I. A Voronoi diagram-based workspace partition for weak cooperation of multi-robot system in orchard [J]. IEEE Access, 2020, 8: 20676-20686. 10.1109/access.2020.2969449 |
| 8 | NIKITENKO A, LAVENDELIS E, EKMANIS M, et al. Task allocation methods for homogeneous multi-robot systems: feed pushing case study [J]. Automatic Control and Computer Sciences, 2018, 52: 371-381. 10.3103/s0146411618050097 |
| 9 | 林思梦. 基于粒子群算法的灾后救援多机器人任务分配[D].徐州:中国矿业大学,2020: 2. |
| LIN S M. Multi-robot task allocation for rescue after disaster based on particle swarm optimization algorithm[D]. Xuzhou: China University of Mining and Technology, 2020: 2. | |
| 10 | MOURADIAN C, SAHOO J, GLITHO R H, et al. A coalition formation algorithm for multi-robot task allocation in large-scale natural disasters [C]// Proceedings of the 2017 13th International Wireless Communications and Mobile Computing Conference. Piscataway: IEEE, 2017: 1909-1914. 10.1109/iwcmc.2017.7986575 |
| 11 | GUNN T, ANDERSON J. Dynamic heterogeneous team formation for robotic urban search and rescue [J]. Journal of Computer and System Sciences, 2015, 81(3): 553-567. 10.1016/j.jcss.2014.11.009 |
| 12 | 李鑫滨,章寿涛,闫磊,等. 基于鲁棒Restless Bandits模型的多水下自主航行器任务分配策略[J].计算机应用,2019,39(10):2795-2801. 10.11772/j.issn.1001-9081.2019020341 |
| LI X B, ZHANG S T, YAN L, et al. Multiple autonomous underwater vehicle task allocation policy based on robust Restless Bandit model[J]. Journal of Computer Applications, 2019,39(10):2795-2801. 10.11772/j.issn.1001-9081.2019020341 | |
| 13 | CARRENO Y, PAIRET È, PETILLOT Y, et al. A decentralized strategy for heterogeneous AUV missions via goal distribution and temporal planning [C]// Proceedings of the 2020 International Conference on Automated Planning and Scheduling. Palo Alto: AAAI Press, 2020: 431-439. 10.1609/icaps.v30i1.6738 |
| 14 | GUO X, HU J, CHEN J, et al. Semantic histogram based graph matching for real-time multi-robot global localization in large scale environment [J]. IEEE Robotics and Automation Letters, 2021, 6(4): 8349-8356. 10.1109/lra.2021.3058935 |
| 15 | KORASH G A, STENTZ A, DIAS M B. A comprehensive taxonomy for multi-robot task allocation [J]. The International Journal of Robotics Research, 2013, 32(12):1495-1512. 10.1177/0278364913496484 |
| 16 | GERKEY B P, MATARIĆ M J. A formal analysis and taxonomy of task allocation in multi-robot systems [J]. The International Journal of Robotics Research, 2004, 23(9): 939-954. 10.1177/0278364904045564 |
| 17 | KORSAH G A, KANNAN B, BROWNING B, et al. xBots: an approach to generating and executing optimal multi-robot plans with cross-schedule dependencies[C]// Proceedings of the 2012 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2012: 115-122. 10.1109/icra.2012.6225234 |
| 18 | WANG Z, GOMBOLAY M. Learning scheduling policies for multi-robot coordination with graph attention networks [J]. IEEE Robotics and Automation Letters, 2020, 5(3): 4509-4516. 10.1109/lra.2020.3002198 |
| 19 | BISCHOFF E, MEYER F, INGA J, et al. Multi-robot task allocation and scheduling considering cooperative tasks and precedence constraints[C]// Proceedings of the 2020 IEEE International Conference on Systems, Man, and Cybernetics. Piscataway: IEEE, 2020: 3949-3956. 10.1109/smc42975.2020.9283215 |
| 20 | BISCHOFF E, TEUFEL J, INGA J, et al. Towards interactive coordination of heterogeneous robotic teams — introduction of a reoptimization framework [C]// Proceedings of the 2021 IEEE International Conference on Systems, Man, and Cybernetics. Piscataway: IEEE, 2021: 1380-1386. 10.1109/smc52423.2021.9659002 |
| 21 | MILORADOVIĆ B, ÇÜRÜKLÜ B, EKSTRÖM M, et al. A genetic algorithm approach to multi-agent mission planning problems[C]// Proceedings of the 2020 9th International Conference on Operations Operations Research and Enterprise Systems. Cham: Springer, 2020: 109-134. 10.1007/978-3-030-37584-3_6 |
| 22 | MILORADOVIĆ B, ÇÜRÜKLÜ B, EKSTRÖM M, et al. Extended colored traveling salesperson for modeling multi-agent mission planning problems [C]// Proceedings of the 2019 8th International Conference on Operations Research and Enterprise Systems. Cham: Springer, 2019: 237-244. 10.5220/0007309002370244 |
| 23 | QI B, PU L, XU C, et al. Multi-robot task assignment method in the construction waste sorting system [C]// Proceedings of the 2022 IEEE International Conference on Mechatronics and Automation. Piscataway: IEEE, 2022: 1364-1369. 10.1109/icma54519.2022.9856058 |
| 24 | CECHINEL A K, DE PIERI E R, FERNANDES PEREZ A L, et al. Multi-robot task allocation using island model genetic algorithm [J]. IFAC-PapersonLine, 2021, 54(1): 558-563. 10.1016/j.ifacol.2021.08.063 |
| 25 | 范学满,薛昌友,张会.基于多种群遗传算法的多UUV任务分配方法[J].水下无人系统学报,2022,30(5):621-630. 10.11993/j.issn.2096-3920.202107001 |
| FAN X M, XUE C Y, ZHANG H. Task assignment method for multiple UUVs based on multi-population genetic algorithm [J]. Journal of Unmanned Undersea Systems,2022,30(5):621-630. 10.11993/j.issn.2096-3920.202107001 | |
| 26 | RAMCHURN S D, POLUKAROV M, FARINELLI A, et al. Coalition formation with spatial and temporal constraints[C]// Proceedings of the 9th International Conference on Autonomous Agents and Multiagent Systems. New York: ACM, 2010,3: 1181-1188. |
| 27 | KOES M, NOURBAKHSH I, SYCARA K, et al. Heterogeneous multi-robot coordination with spatial and temporal constraints[C]// Proceedings of the 20th National Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2005: 1292-1297. |
| 28 | ZHANG Y, PARKER L E. Multi-robot task scheduling[C]// Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2013: 2992-2998. 10.1109/icra.2013.6630992 |
| 29 | 方剑,席裕庚.周期性和事件驱动的Job Shop滚动调度策略[J].控制与决策,1997, 12(2):159-162,166. 10.3321/j.issn:1001-0920.1997.02.015 |
| FANG J, XI Y G. A periodic and event-driven rolling horizon job shop scheduling strategy[J]. Control and Decision, 1997, 12(2):159-162,166. 10.3321/j.issn:1001-0920.1997.02.015 | |
| 30 | SUSLOVA E, FAZLI P. Multi-robot task allocation with time window and ordering constraints[C]// Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2020: 6909-6916. 10.1109/iros45743.2020.9341247 |
| 31 | ENTEZARI Z, MAHOOTCHI M. Developing a mathematical model for staff routing and scheduling in home health care industries: genetic algorithm-based solution scheme [J]. Scientia Iranica, 2021, 28(6): 3692-3718. |
| [1] | 刘栋, 李晨航, 吴长茂, 茹法鑫, 夏媛媛. 基于可校正强化搜索遗传算法的光学系统自动设计[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2838-2847. |
| [2] | 高麟, 周宇, 邝得互. 进化双层自适应局部特征选择[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1408-1414. |
| [3] | 李炫锋, 刘晟材, 唐珂. 机会约束的多选择背包问题的遗传算法求解[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1378-1385. |
| [4] | 佘维, 李阳, 钟李红, 孔德锋, 田钊. 基于改进实数编码遗传算法的神经网络超参数优化[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 671-676. |
| [5] | 梁军, 洪泽泓, 余松森. 基于改进粒子群优化算法和遗传变异的图像分割模型[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1743-1749. |
| [6] | 王彬, 向甜, 吕艺东, 王晓帆. 基于NSGA‑Ⅱ的自适应多尺度特征通道分组优化算法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1401-1408. |
| [7] | 张敏, 韩晓龙. 多目标模糊机会约束规划的低碳多式联运路径优化[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 636-644. |
| [8] | 薛海蓉, 韩晓龙. 基于改进NSGA-Ⅱ的考虑自动引导车充电策略的集成调度[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3848-3855. |
| [9] | 刘乾, 张洋铭, 万定生. 网格化分布式新安江模型并行计算算法[J]. 《计算机应用》唯一官方网站, 2023, 43(11): 3327-3333. |
| [10] | 姜松岩, 廖晓鹃, 陈光柱. 基于可满足性模理论的多处理机通信延迟优化任务调度方法[J]. 《计算机应用》唯一官方网站, 2023, 43(1): 185-191. |
| [11] | 王旭, 申玉民, 熊晓芸, 李鹏, 王金龙. 基于哈希图的建筑物联网数据管理方法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2471-2480. |
| [12] | 范厚明, 牟爽, 岳丽君. 考虑冲突和拥堵的自动导引车调度与路径规划协同优化[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2281-2291. |
| [13] | 刘延飞, 彭征, 王艺辉, 王忠. 基于改进的遗传算法的有刷直流电机PID参数整定[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1634-1641. |
| [14] | 李晓寒, 贾华丁, 程雪, 李太勇. 基于改进遗传算法和图神经网络的股市波动预测方法[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1624-1633. |
| [15] | 吴晴晴, 周丽华, 寸轩懿, 杜国王, 姜懿庭. 异质信息网络中基于有向无环图的影响力最大化算法[J]. 《计算机应用》唯一官方网站, 2022, 42(3): 895-903. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||