《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (7): 2203-2210.DOI: 10.11772/j.issn.1001-9081.2024070944
张英俊1, 闫薇薇1( ), 谢斌红1, 张睿1, 陆望东2
), 谢斌红1, 张睿1, 陆望东2
Yingjun ZHANG1, Weiwei YAN1(), Binhong XIE1, Rui ZHANG1, Wangdong LU2
摘要:
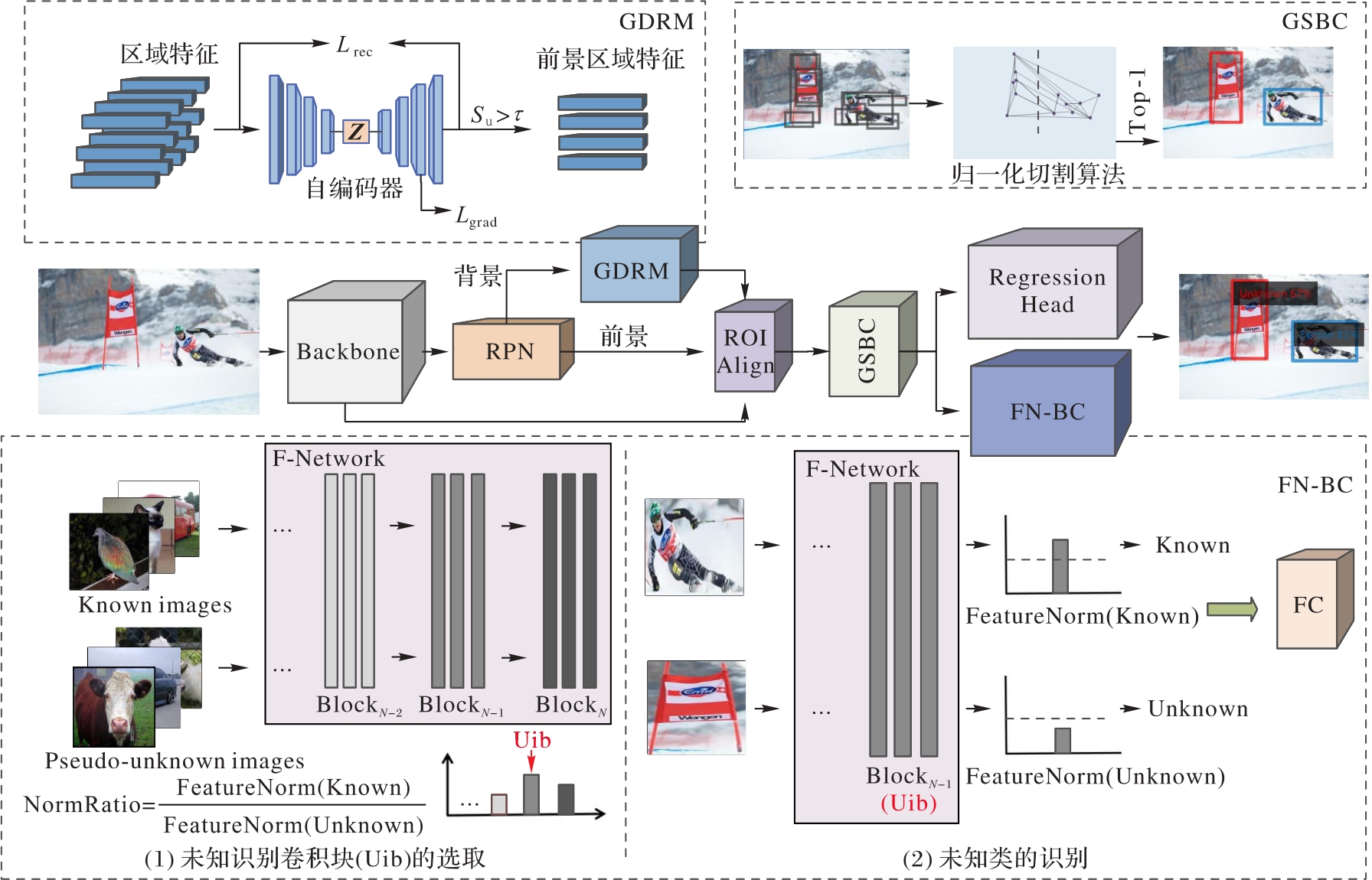
开放世界目标检测(OWOD)将目标检测任务拓展至真实多变的环境中,要求模型能准确识别已知和未知对象,并逐步学习新知识。针对现有OWOD网络模型中未知类的召回率偏低和误识别的问题,提出一种梯度区分与特征范数驱动的开放世界目标检测(GDFN-OWOD)网络模型。针对未知类召回率偏低的问题,提出梯度区分性表征模块(GDRM),即利用反向传播的梯度差异区分未知类别和背景,以提高未知类召回率;此外,引入基于图分割的框聚类(GSBC)算法将物体边界框的确定建模为图分解问题,从而减少冗余的边界框,进而降低模型的计算量;针对未知类误识别的问题,采用基于特征范数的分类器(FN-BC)选择性能最优的卷积层识别已知和未知类别,以达到更高的识别准确率。在M-OWODB数据集上的实验结果表明,与最优对比模型相比在T1、T2、T3任务中GDFN-OWOD的未知类召回率分别提升了1.1、2.1、0.9个百分点,而绝对开集误差(A-OSE)分别降低了35.1%、28.7%和12.2%。可见,与现有的OWOD网络模型相比,所提网络模型有效缓解了未知类的召回率偏低和误识别的问题。
中图分类号: