


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (1): 325-336.DOI: 10.11772/j.issn.1001-9081.2023121827
车文博1, 王建华1( ), 郑翔1, 吴恭兴1, 张舜2, 王浩铸1
), 郑翔1, 吴恭兴1, 张舜2, 王浩铸1
收稿日期:2024-01-02
修回日期:2024-04-02
接受日期:2024-04-07
发布日期:2024-04-19
出版日期:2025-01-10
通讯作者:
王建华
作者简介:车文博(1999—),男,山东威海人,硕士研究生,主要研究方向:无人水面艇控制、视觉检测定位与导航;基金资助:
Wenbo CHE1, Jianhua WANG1(), Xiang ZHENG1, Gongxing WU1, Shun ZHANG2, Haozhu WANG1
Received:2024-01-02
Revised:2024-04-02
Accepted:2024-04-07
Online:2024-04-19
Published:2025-01-10
Contact:
Jianhua WANG
About author:CHE Wenbo, born in 1999, M. S. candidate. His research interests include control of unmanned surface vehicle, visual detection positioning and navigation.Supported by:摘要:
针对无人艇(USV)在地下封闭水体中卫星定位信号缺失、通信受限、环境光线弱等问题,提出一种地下封闭水体内多USV协同的视觉定位方法。首先,设计一种艇载光源合作标志物,并根据艇身结构与应用场景对标志物结构进行优化;其次,采用单目视觉采集标志物图像,并求取特征点的图像坐标;再次,根据摄像机成像模型,基于合作标志物特征点的空间坐标及其对应的图像坐标之间的关系,通过改进直接线性变换方法求解相邻艇间的相对位置;然后,利用前后艇的摄像机进行艇间对视,并通过最小方差算法,融合根据前后艇摄像机图像求解所得的相对位置,以提高相对定位精度;最后,利用场景中已知的绝对坐标,获得各无人艇的绝对位置。仿真实验对影响定位误差的因素进行分析,并把所提方法与传统直接线性变换方法进行对比。结果表明,随着距离的增加,所提方法求解优势更趋明显,在距离15 m时求解的位置方差稳定在0.2 m2以内,验证了所提方法的准确性。静态实验结果表明,所提方法能将相对误差稳定在10.0%以内;地下河道内的动态实验结果表明,所提方法求解的绝对定位的航行轨迹达到与卫星定位相当的精度,验证了所提方法的可行性。
中图分类号:
车文博, 王建华, 郑翔, 吴恭兴, 张舜, 王浩铸. 地下封闭水体内多无人艇协同的视觉定位方法[J]. 计算机应用, 2025, 45(1): 325-336.
Wenbo CHE, Jianhua WANG, Xiang ZHENG, Gongxing WU, Shun ZHANG, Haozhu WANG. Cooperative visual positioning method of multiple unmanned surface vehicles in subterranean closed water body[J]. Journal of Computer Applications, 2025, 45(1): 325-336.

图1 应用场景
Fig. 1 Application scene
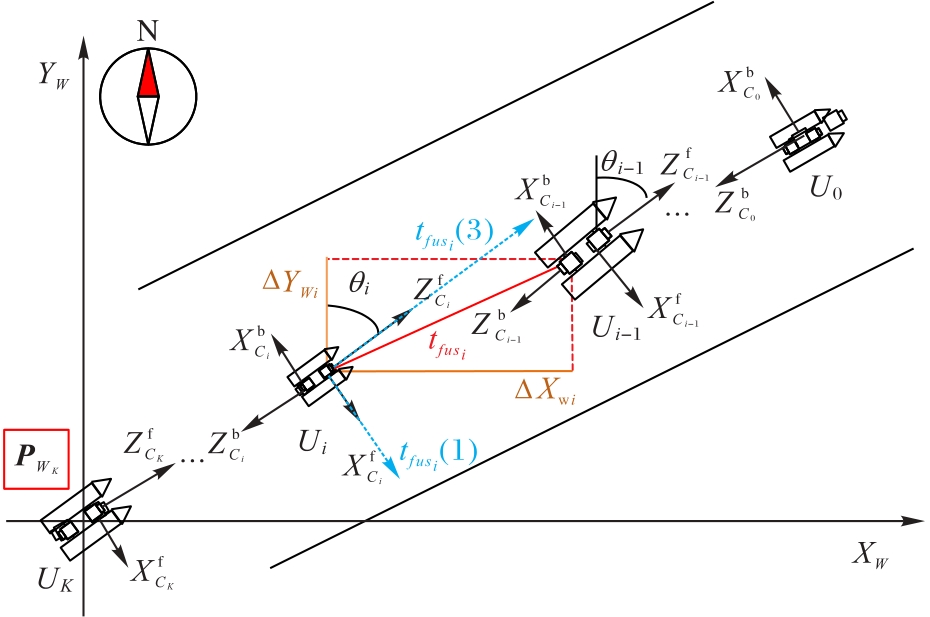
图2 多艇协同视觉定位示意图
Fig. 2 Schematic diagram of cooperative visual positioning of multiple USVs
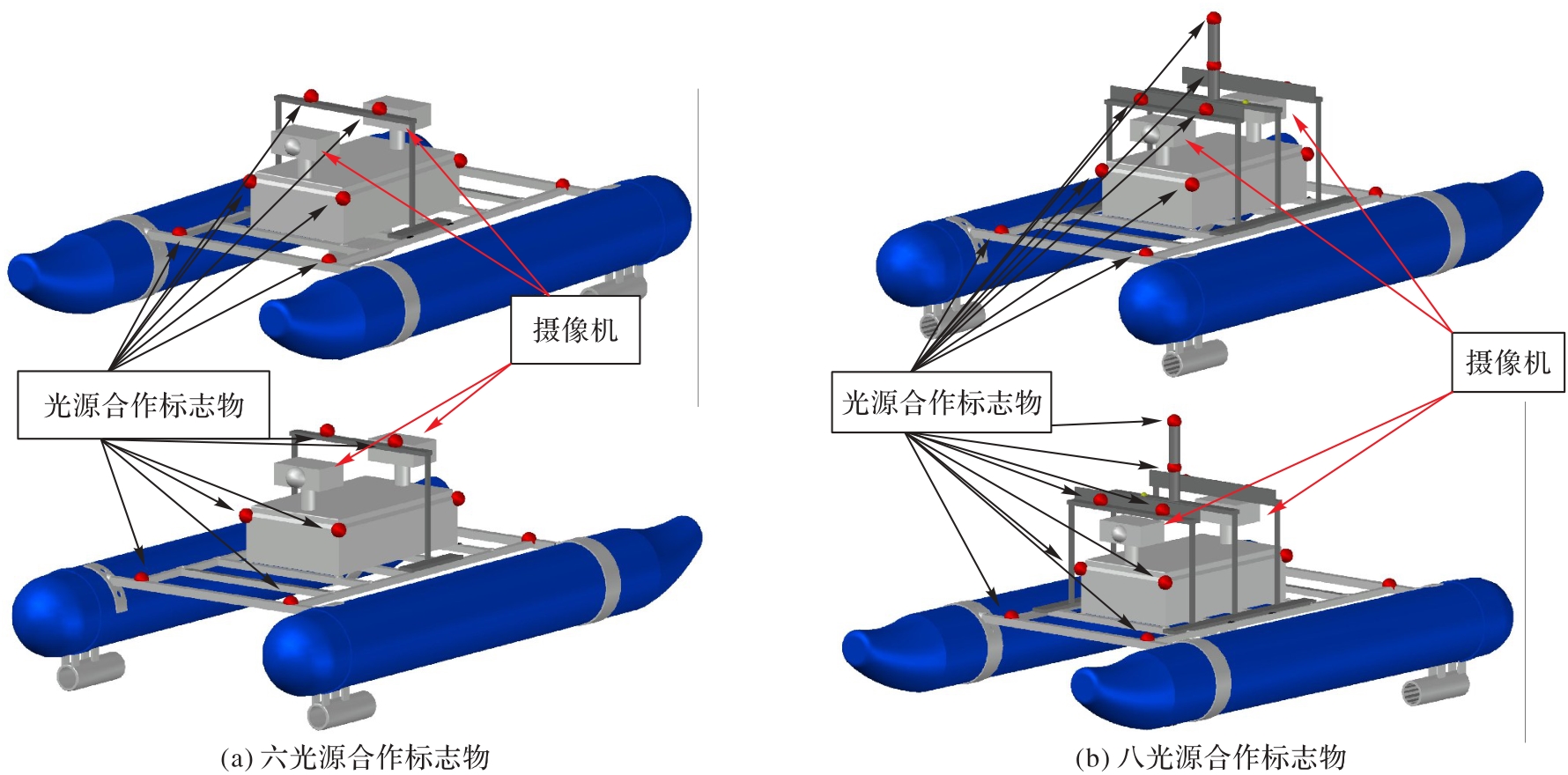
图3 合作标志物结构
Fig. 3 Cooperative marker structures
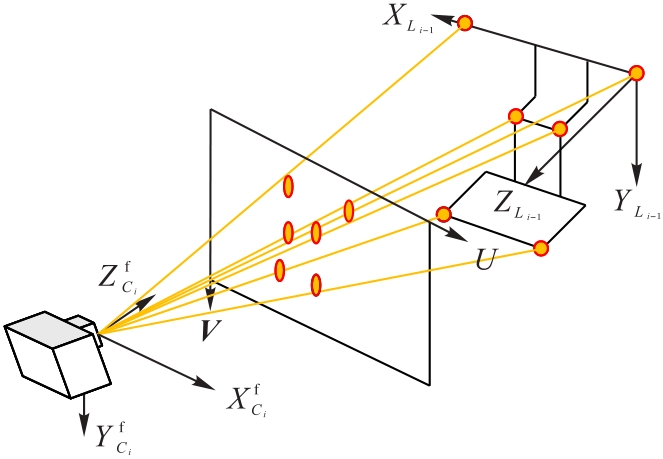
图4 合作标志物投影过程
Fig. 4 Cooperative marker projection process
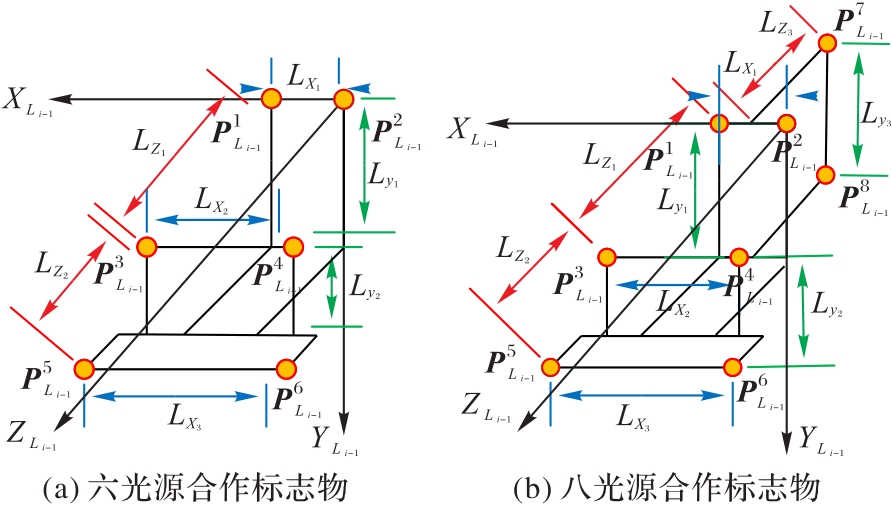
图5 合作标志物的设计
Fig. 5 Design of cooperative markers
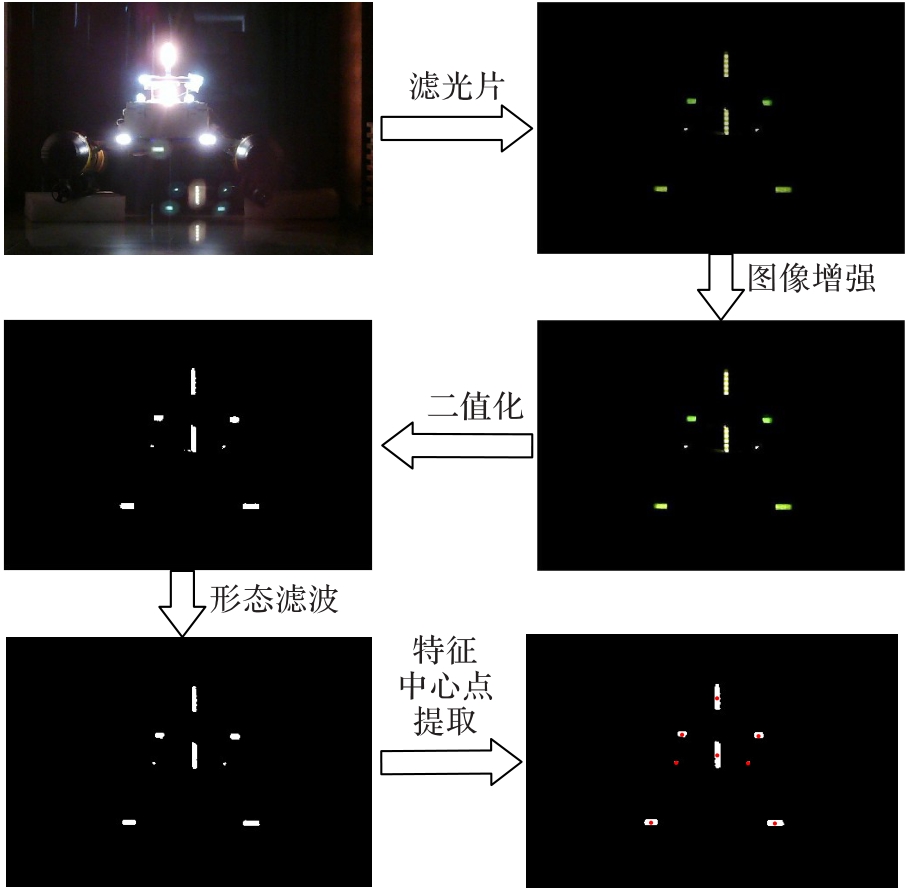
图6 图像处理过程
Fig. 6 Image processing flow

图7 基于未优化合作标志物的相对位置求解结果
Fig. 7 Relative positions solved with unoptimized cooperative markers
| 序号 | N | Lz1/m | Lz2/m | Lz3/m | |
|---|---|---|---|---|---|
| 1 | 6 | 0.10 | 0.25 | 20.00 | |
| 2 | 6 | 0.15 | 0.20 | 6.00 | |
| 3 | 6 | 0.10 | 0.30 | 15.00 | |
| 4 | 6 | 0.15 | 0.25 | 10.00 | |
| 5 | 8 | 0.10 | 0.25 | 0.60 | 0.60 |
| 6 | 8 | 0.10 | 0.20 | 0.45 | 0.80 |
| 7 | 8 | 0.10 | 0.40 | 0.20 | 0.40 |
| 8 | 8 | 0.08 | 0.22 | 0.55 | 0.20 |
| 9 | 8 | 0.05 | 0.20 | 0.50 | 0.50 |
| 10 | 8 | 0.10 | 0.25 | 0.25 | 4.00 |
表1 标志物结构参数优化
Tab. 1 Optimization of marker structure parameters
| 序号 | N | Lz1/m | Lz2/m | Lz3/m | |
|---|---|---|---|---|---|
| 1 | 6 | 0.10 | 0.25 | 20.00 | |
| 2 | 6 | 0.15 | 0.20 | 6.00 | |
| 3 | 6 | 0.10 | 0.30 | 15.00 | |
| 4 | 6 | 0.15 | 0.25 | 10.00 | |
| 5 | 8 | 0.10 | 0.25 | 0.60 | 0.60 |
| 6 | 8 | 0.10 | 0.20 | 0.45 | 0.80 |
| 7 | 8 | 0.10 | 0.40 | 0.20 | 0.40 |
| 8 | 8 | 0.08 | 0.22 | 0.55 | 0.20 |
| 9 | 8 | 0.05 | 0.20 | 0.50 | 0.50 |
| 10 | 8 | 0.10 | 0.25 | 0.25 | 4.00 |

图8 优化后合作标志物的相对位置求解结果
Fig. 8 Relative positions solved with optimized cooperative markers
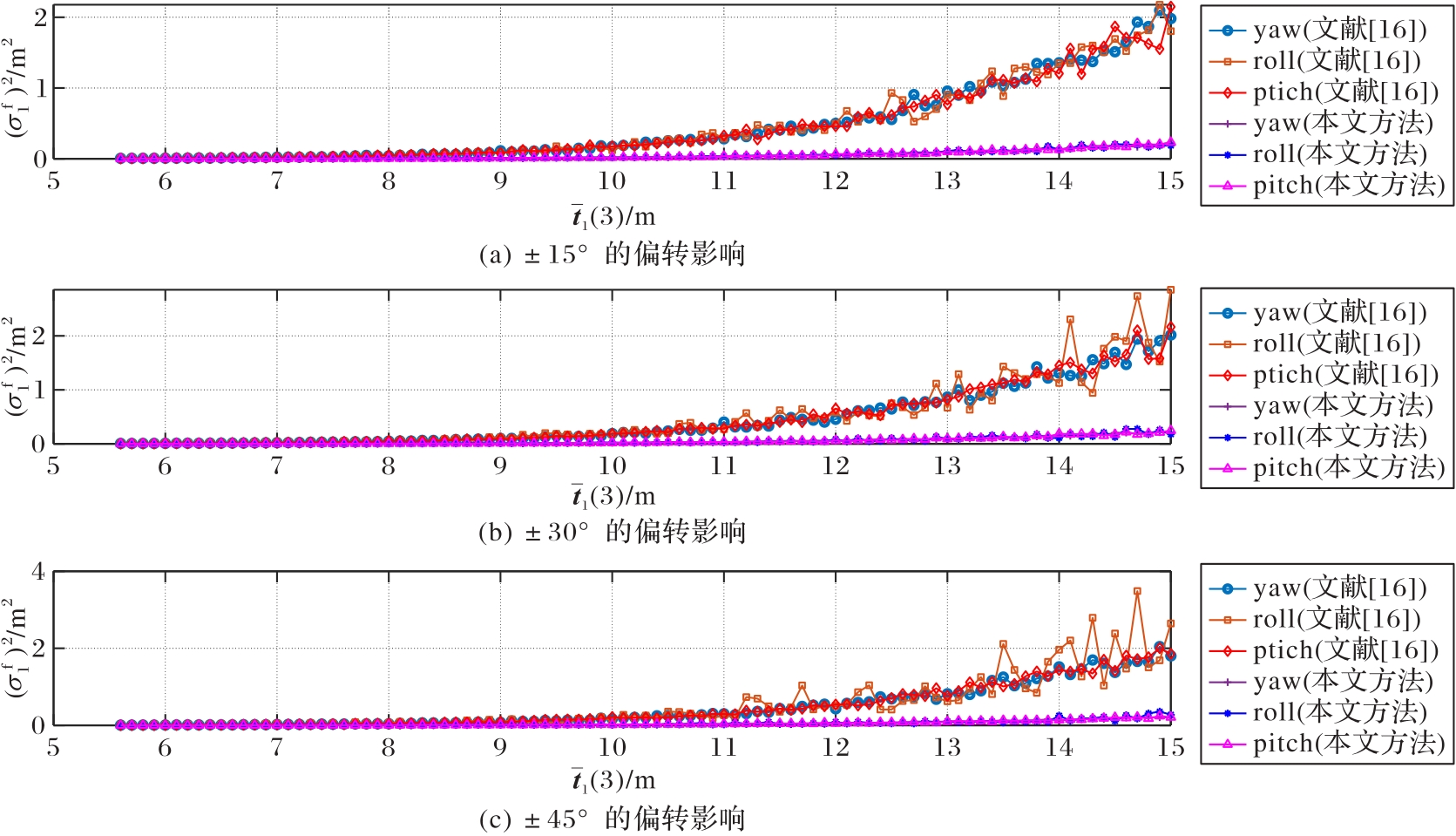
图9 转动影响下的相对位置误差
Fig. 9 Relative position errors under influence of rotations
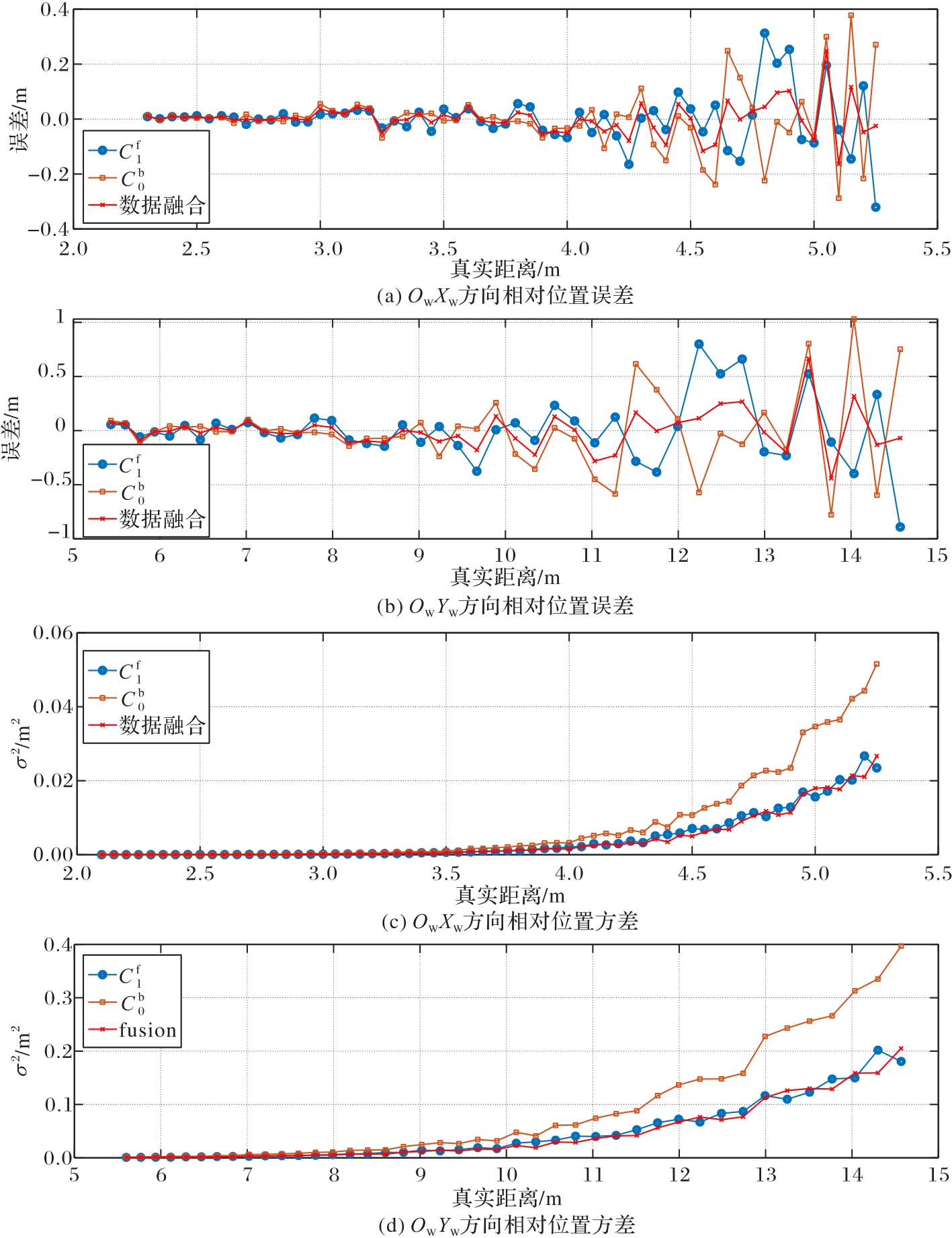
图10 数据融合效果分析
Fig. 10 Analysis of data fusion effect
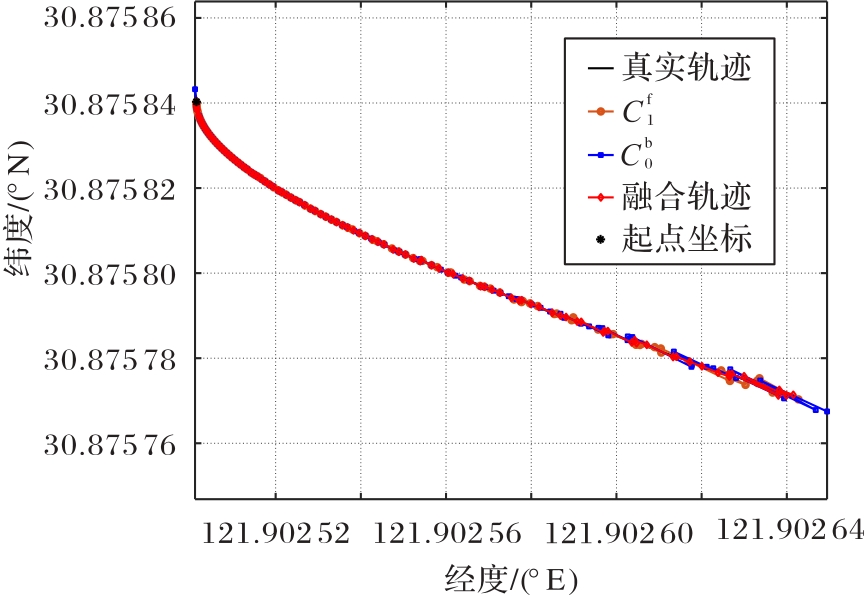
图11 绝对定位轨迹
Fig. 11 Absolute positioning trajectory
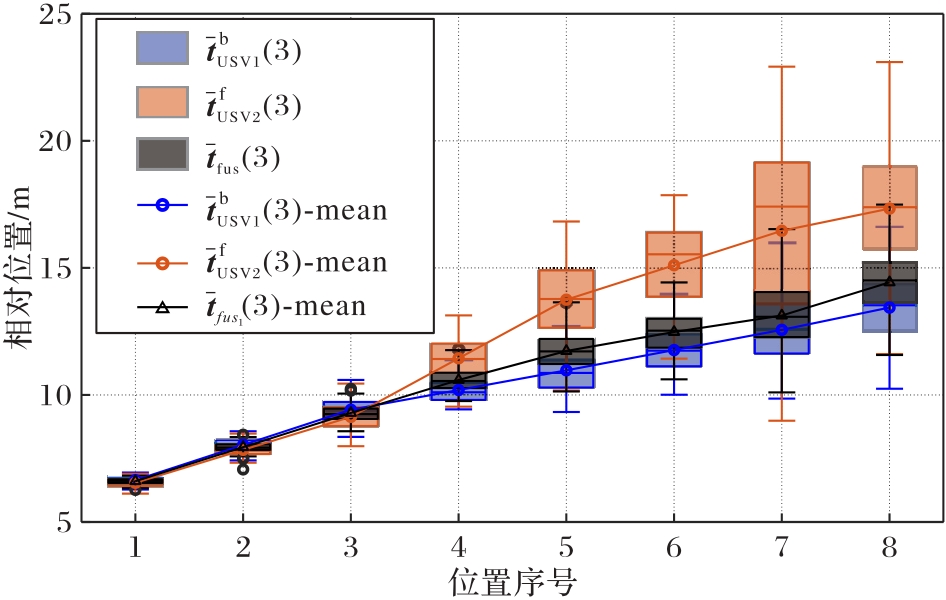
图12 相对位置求解结果箱型图
Fig. 12 Box plot of relative position results
| 位置序号 | 均值/m | 方差/m2 | 相对误差/% | ||||
|---|---|---|---|---|---|---|---|
| 1 | 6.65 | 6.54 | 6.61 | 0.02 | 0.03 | 0.01 | 1.6 |
| 2 | 8.03 | 7.84 | 7.95 | 0.06 | 0.07 | 0.03 | 2.1 |
| 3 | 9.42 | 9.14 | 9.30 | 0.21 | 0.26 | 0.11 | 3.5 |
| 4 | 10.20 | 11.44 | 10.59 | 0.25 | 0.55 | 0.18 | 4.0 |
| 5 | 10.97 | 13.75 | 11.73 | 0.72 | 1.93 | 0.50 | 6.0 |
| 6 | 11.77 | 15.10 | 12.48 | 0.72 | 2.62 | 0.55 | 5.9 |
| 7 | 12.55 | 16.46 | 13.13 | 1.77 | 10.32 | 1.56 | 9.5 |
| 8 | 13.44 | 17.33 | 14.43 | 1.82 | 5.29 | 1.51 | 8.5 |
表2 静态实验求解结果
Tab. 2 Solution results of static experiments
| 位置序号 | 均值/m | 方差/m2 | 相对误差/% | ||||
|---|---|---|---|---|---|---|---|
| 1 | 6.65 | 6.54 | 6.61 | 0.02 | 0.03 | 0.01 | 1.6 |
| 2 | 8.03 | 7.84 | 7.95 | 0.06 | 0.07 | 0.03 | 2.1 |
| 3 | 9.42 | 9.14 | 9.30 | 0.21 | 0.26 | 0.11 | 3.5 |
| 4 | 10.20 | 11.44 | 10.59 | 0.25 | 0.55 | 0.18 | 4.0 |
| 5 | 10.97 | 13.75 | 11.73 | 0.72 | 1.93 | 0.50 | 6.0 |
| 6 | 11.77 | 15.10 | 12.48 | 0.72 | 2.62 | 0.55 | 5.9 |
| 7 | 12.55 | 16.46 | 13.13 | 1.77 | 10.32 | 1.56 | 9.5 |
| 8 | 13.44 | 17.33 | 14.43 | 1.82 | 5.29 | 1.51 | 8.5 |
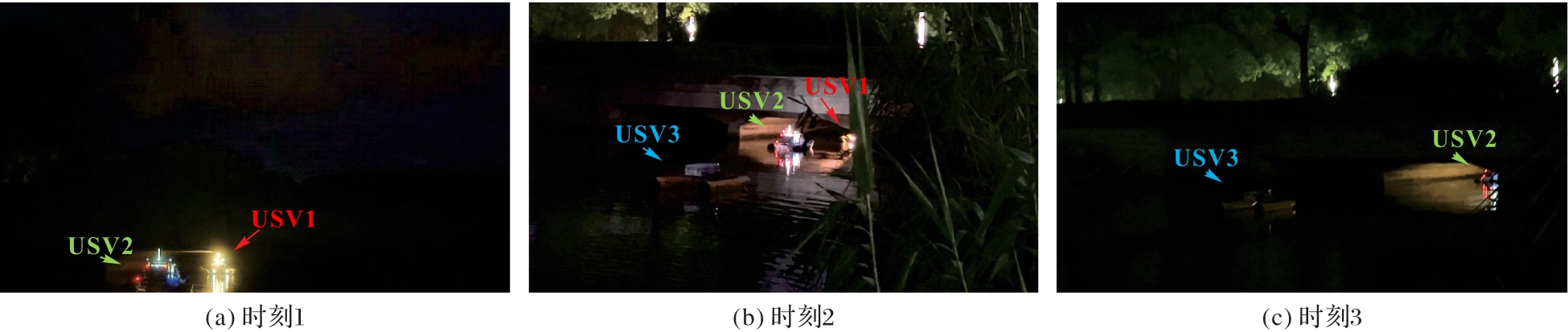
图13 实验场景
Fig. 13 Experimental scene
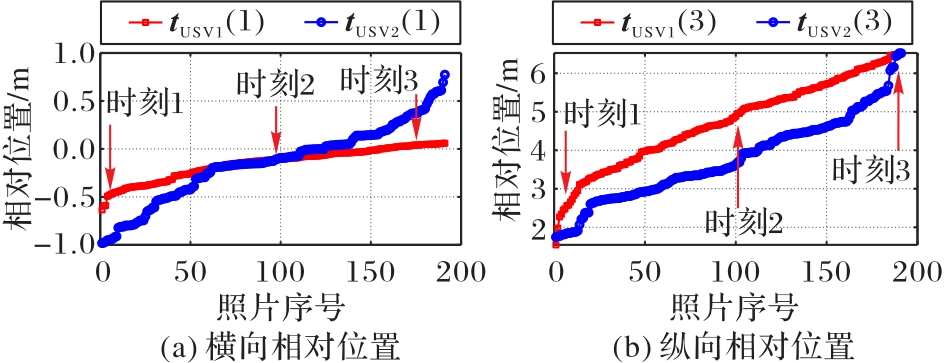
图14 艇间的相对位置
Fig. 14 Relative positions between vehicles
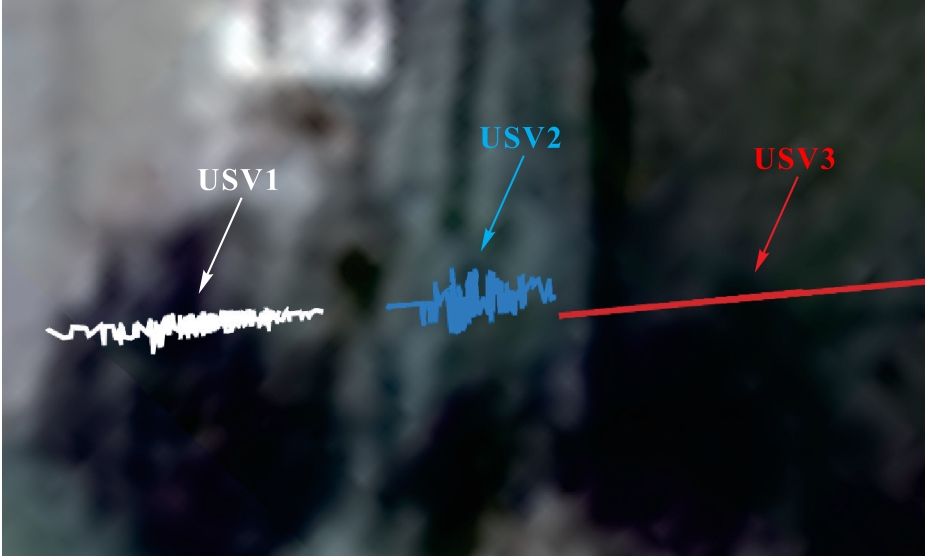
图15 USV1与USV2的绝对定位轨迹
Fig. 15 Absolute positioning trajectories of USV1 and USV2
| 1 | 杨一烽,杜炯,张欣.国内地下式污水处理厂的发展现状和关键技术分析[J].净水技术, 2021, 40(10): 101-106. |
| YANG Y F, DU J, ZHANG X. Development status and key technology analysis of Underground WasteWater Treatment Plants (UWWTPs) at home [J]. Water Purification Technology, 2021, 40(10): 101-106. | |
| 2 | 李滨.智能巡检机器人系统在地下式污水处理厂的运用[J].自动化应用, 2020(4): 77-79. |
| LI B. Application of intelligent inspection robot system in underground sewage treatment plant [J]. Automation Application, 2020(4): 77-79. | |
| 3 | WANG X, SONG X, DU L. Review and application of unmanned surface vehicle in China [C]// Proceedings of the 5th International Conference on Transportation Information and Safety. Piscataway: IEEE, 2019: 1476-1481. |
| 4 | ZHEN W, SCHERER S. Estimating the localizability in tunnel-like environments using LiDAR and UWB [C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 4903-4908. |
| 5 | TAGLIABUE A, TORDESILLAS J, CAI X, et al. LION: lidar-inertial observability-aware navigator for vision-denied environments [C]// Proceedings of the 2020 International Symposium on Experimental Robotics, SPAR 19. Cham: Springer, 2021: 380-390. |
| 6 | 杨港顺.基于UWB信号的地下遮蔽空间信道建模和定位研究[D].北京:北京邮电大学, 2022: 9-24. |
| YANG G S. Research on channel modeling and localization of UWB signal in the underground space [D]. Beijing: Beijing University of Posts and Telecommunications, 2022: 9-24. | |
| 7 | 赵冬青,畅雅雯,单彦虎,等.双目测量系统的室内定位与重建[J].激光杂志, 2022, 43(1): 19-23. |
| ZHAO D Q, CHANG Y W, SHAN Y H, et al. Indoor positioning and reconstruction of the binocular measurement system [J]. Laser Journal, 2022, 43(1): 19-23. | |
| 8 | 何红坤,王宁,张富宇,等.水面无人艇单目视觉伺服自主控制研究综述[J].中国舰船研究, 2024, 19(1): 15-28. |
| HE H K, WANG N, ZHANG F Y, et al. Review of research on monocular visual servo-based autonomous control of unmanned surface vehicles [J]. Chinese Journal of Ship Research, 2024, 19(1): 15-28. | |
| 9 | 王榆钦.弱光照环境下的视觉定位技术研究[D].厦门:厦门大学, 2020: 11-21. |
| WANG Y Q. Research on visual positioning technology under low illumination environment [D]. Xiamen: Xiamen University, 2020: 11-21. | |
| 10 | ALZUHIRI M, LI Z, RAO A, et al. IMU-assisted robotic structured light sensing with featureless registration under uncertainties for pipeline inspection [J]. NDT and E International, 2023, 139: No.102936. |
| 11 | ZHANG D, YANG G, JI J, et al. Pose measurement and motion estimation of non-cooperative satellite based on spatial circle feature [J]. Advances in Space Research, 2023, 71(3): 1721-1734. |
| 12 | 赵连军.基于目标特征的单目视觉位置姿态测量技术研究[D].成都:中国科学院研究生院(中国科学院光电技术研究所), 2014: 2-53. |
| ZHAO L J. Research on mono-vision pose measurement based on features of target [D]. Chengdu: University of Chinese Academy of Sciences (Institute of Optics and Electronics, Chinese Academy of Sciences), 2014: 2-53. | |
| 13 | 赵丽科.单目视觉的刚体运动目标位姿测量方法研究[D].武汉:武汉大学, 2018: 14-41. |
| ZHAO L K. Research on measurement method of rigid object position and orientation based on monocular vision [D]. Wuhan: Wuhan University, 2018: 14-41. | |
| 14 | 王保丰,李广云,陈继华,等.航天器交会对接中测量靶标的两种设计方法[J].宇航学报, 2008, 29(1): 162-166. |
| WANG B F, LI G Y, CHEN J H, et al. Two methods of coded targets used in rendezvous and docking [J]. Journal of Astronautics, 2008, 29(1): 162-166. | |
| 15 | 吕耀宇.空间合作目标单目视觉位姿测量技术研究[D].长春:中国科学院大学(中国科学院长春光学精密机械与物理研究所), 2018: 23-61. |
| LYU Y Y. Research on mono-vision pose measurement for space cooperative target [D]. Changchun: University of Chinese Academy of Sciences (Changchun Institute of Optics, Fine Mechanics and Physics, Chinese Academy of Sciences), 2018: 23-61. | |
| 16 | ABDEL-AZIZ Y I, KARARA H M. Direct linear transformation from comparator coordinates into object space coordinates in close-range photogrammetry [J]. Photogrammetric Engineering and Remote Sensing, 2015, 81(2): 103-107. |
| 17 | 吴福朝,胡占义. PnP问题的线性求解算法[J].软件学报, 2003, 14(3): 682-688. |
| WU F C, HU Z Y. A linear method for the PnP problem [J]. Journal of Software, 2003, 14(3): 682-688. | |
| 18 | 王平,周雪峰,安爱民,等.一种鲁棒且线性的PnP问题求解方法[J].仪器仪表学报, 2020, 41(9): 271-280. |
| WANG P, ZHOU X F, AN A M, et al. Robust and linear solving method for Perspective-n-Point problem [J]. Chinese Journal of Scientific Instrument, 2020, 41(9): 271-280. | |
| 19 | 何帅民,陈皓,王振宇.基于PnP算法的单目视觉位移测量方法[J].新技术新工艺, 2023(6): 46-52. |
| HE S M, CHEN H, WANG Z Y. Displacement measurement method of monocular vision based on PnP algorithm [J]. New Technology and New Process, 2023(6): 46-52. | |
| 20 | 李占旗,高继东,彭凯,等.基于PnP算法的前方车辆测距方法[J].国外电子测量技术, 2020, 39(12): 104-108. |
| LI Z Q, GAO J D, PENG K, et al. Method of measurement vehicle distance based on PnP [J]. Foreign Electronic Measurement Technology, 2020, 39(12): 104-108. | |
| 21 | 黄双发,周乐来,李贻斌.基于视觉的移动机器人相对位姿优化估计[J].无人系统技术, 2023, 6(4): 104-112. |
| HUANG S F, ZHOU L L, LI Y B. Vision-based relative pose estimation for mobile robots [J]. Unmanned Systems Technology, 2023, 6(4): 104-112. | |
| 22 | TULLY S, KANTOR G, CHOSET H. Leap-frog path design for multi-robot cooperative localization [M]// HOWARD A, IAGNEMMA K, KELLY A. Field and service robotics: results of the 7th international conference, STAR 62. Berlin: Springer, 2010: 307-317. |
| 23 | ZHANG Z. Flexible camera calibration by viewing a plane from unknown orientations [C]// Proceedings of the 7th IEEE International Conference on Computer Vision. Piscataway: IEEE, 1999: 666-673. |
| [1] | 潘高峰, 樊渊, 汝玉, 郭予超. 基于点线特征融合的低纹理单目视觉同时定位与地图构建算法[J]. 《计算机应用》唯一官方网站, 2022, 42(7): 2170-2176. |
| [2] | 袁蒙恩, 陈立家, 冯子凯. 基于单目视觉的多种群粒子群机械臂路径规划算法[J]. 计算机应用, 2020, 40(10): 2863-2871. |
| [3] | 林政, 吕霞付. 基于改进模糊算法的水面无人艇自主避障[J]. 计算机应用, 2019, 39(9): 2523-2528. |
| [4] | 张午阳, 章伟, 宋芳, 龙林. 基于深度学习的四旋翼无人机单目视觉避障方法[J]. 计算机应用, 2019, 39(4): 1001-1005. |
| [5] | 罗余洋, 徐为民, 张梦杰, 刘玉强. 采用单目视觉的桥吊负载空间定位方法[J]. 计算机应用, 2016, 36(4): 1156-1162. |
| [6] | 任秀丽 安乐. 无线传感器网络局部协同定位算法[J]. 计算机应用, 2014, 34(9): 2460-2463. |
| [7] | 何少佳 刘子扬 史剑清. 基于单目视觉的室内机器人障碍检测方案[J]. 计算机应用, 2012, 32(09): 2556-2559. |
| [8] | 刘志强 温华. 基于单目视觉的车辆碰撞预警系统[J]. 计算机应用, 2007, 27(8): 2056-2058. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||