


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (3): 962-971.DOI: 10.11772/j.issn.1001-9081.2022010037
Special Issue: 前沿与综合应用
• Frontier and comprehensive applications • Previous Articles Next Articles
Xianbojun FAN1, Lijia CHEN1( ), Shen LI2, Chenlu WANG1, Min WANG1, Zan WANG1, Mingguo LIU1
), Shen LI2, Chenlu WANG1, Min WANG1, Zan WANG1, Mingguo LIU1
Received:2022-01-13
Revised:2022-03-14
Accepted:2022-03-22
Online:2022-04-14
Published:2023-03-10
Contact:
Lijia CHEN
About author:FAN Xianbojun, born in 1994, M. S. candidate. His research interests include swarm intelligence algorithm.Supported by:
范贤博俊1, 陈立家1(), 李珅2, 王晨露1, 王敏1, 王赞1, 刘名果1
通讯作者:
陈立家
作者简介:范贤博俊(1994—),男,河南义马人,硕士研究生,主要研究方向:群智能算法基金资助:CLC Number:
Xianbojun FAN, Lijia CHEN, Shen LI, Chenlu WANG, Min WANG, Zan WANG, Mingguo LIU. Robust joint modeling and optimization method for visual manipulators[J]. Journal of Computer Applications, 2023, 43(3): 962-971.
范贤博俊, 陈立家, 李珅, 王晨露, 王敏, 王赞, 刘名果. 鲁棒的视觉机械臂联合建模优化方法[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 962-971.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022010037
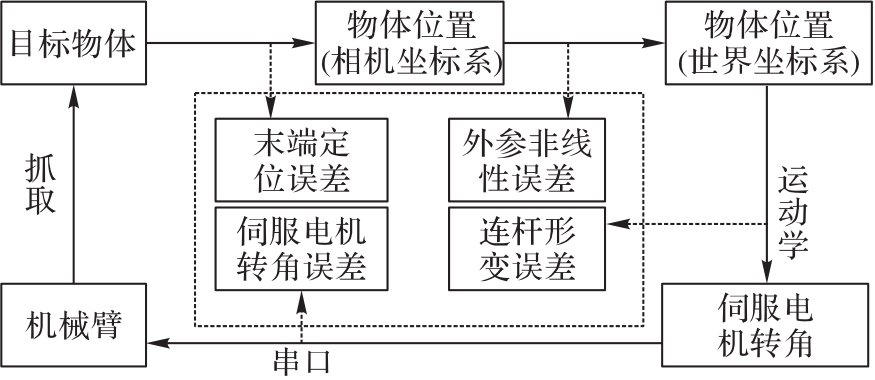
Fig.1 Grab process of visual manipulator system
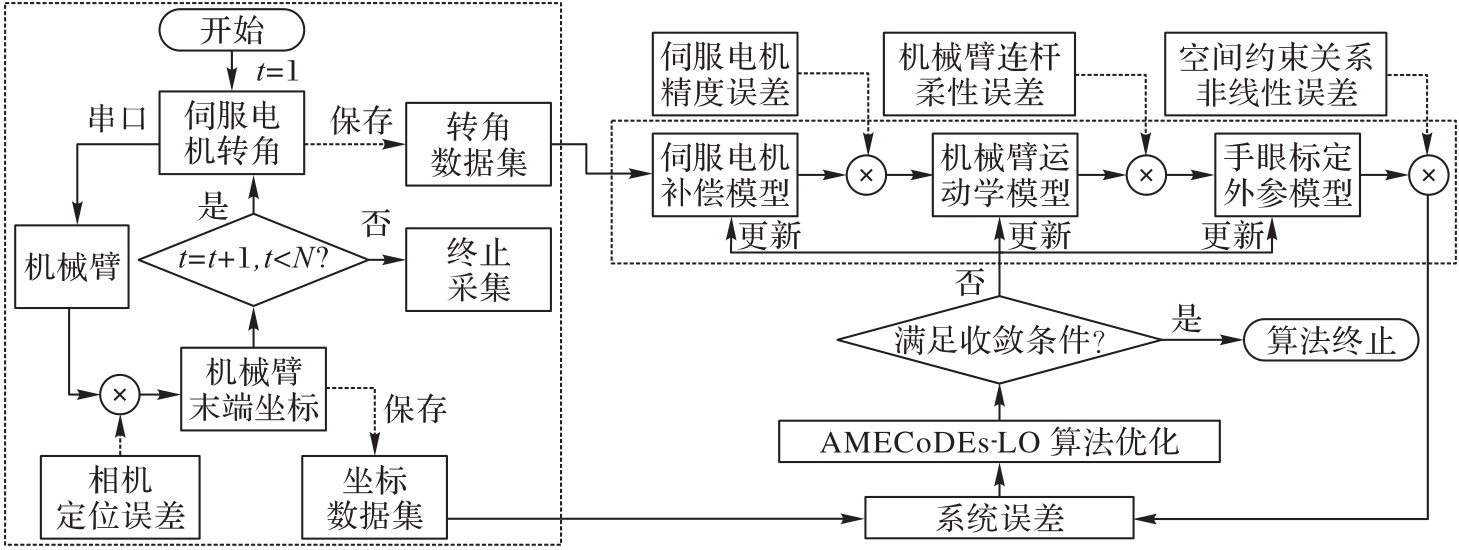
Fig.2 Overall system optimization strategy
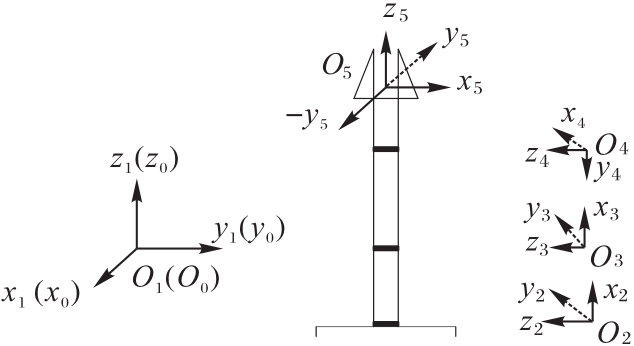
Fig.3 Joint coordinate system

Fig.4 Individual coding structure of AMECoDEs-LO

Fig.5 Switching between three optimization states
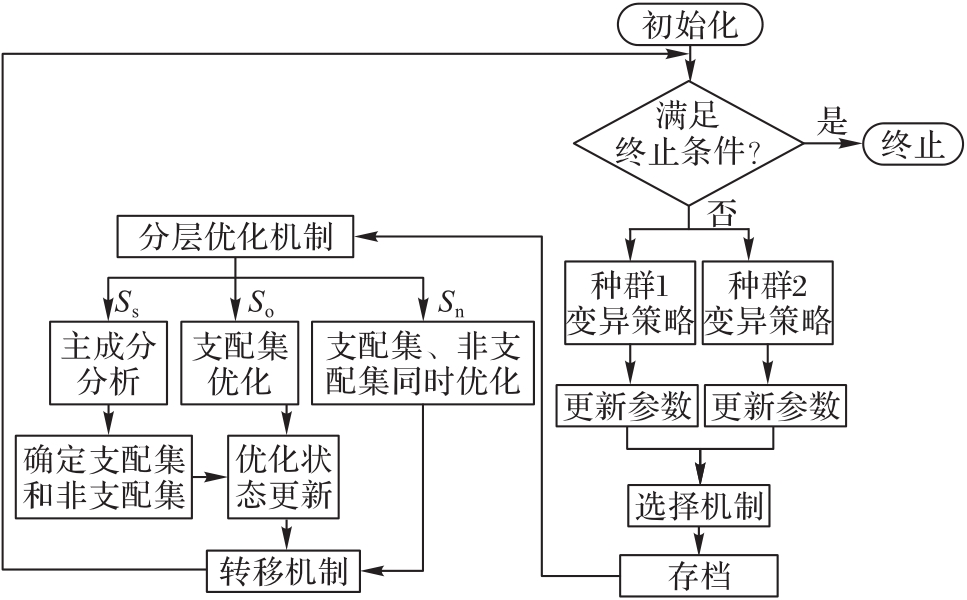
Fig.6 Flowchart of AMECoDEs-LO
| 编码类型 | 维度 | 配置 |
|---|---|---|
| Type 0 | 20 | |
| Type 1 | 20 | |
| Type 2 | 26 | |
| Type 3 | 26 | |
| Type 4 | 41 |
Tab.1 Five individual configurations
| 编码类型 | 维度 | 配置 |
|---|---|---|
| Type 0 | 20 | |
| Type 1 | 20 | |
| Type 2 | 26 | |
| Type 3 | 26 | |
| Type 4 | 41 |
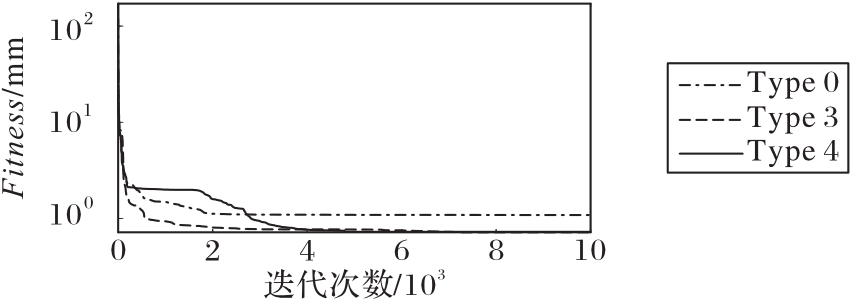
Fig.7 Convergence of three individual configurations under normal manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 0 | 2 137 | 39 | 1.086 935 |
| Type 3 | 4 948 | 92 | 0.718 967 |
| Type 4 | 7 679 | 145 | 0.726 831 |
Tab.2 Individual configuration under normal manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 0 | 2 137 | 39 | 1.086 935 |
| Type 3 | 4 948 | 92 | 0.718 967 |
| Type 4 | 7 679 | 145 | 0.726 831 |
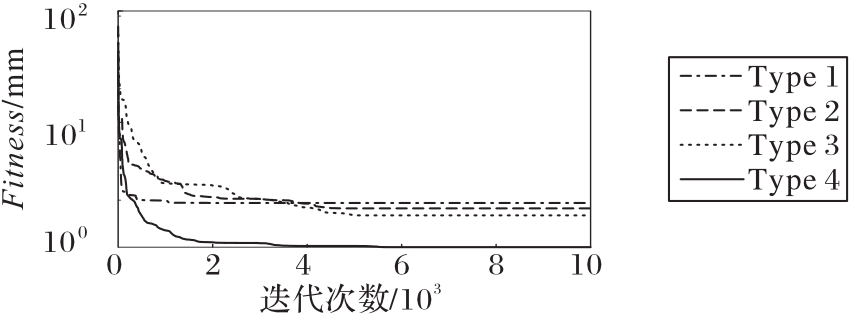
Fig.8 Convergence of four individual configurations under broken manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 1 | 1 944 | 37 | 1.886 338 |
| Type 2 | 4 758 | 88 | 1.685 230 |
| Type 3 | 4 988 | 93 | 1.458 970 |
| Type 4 | 7 835 | 149 | 0.755 262 |
Tab.3 Individual configurations under broken manipulator environment
| 编码类型 | 迭代次数 | 收敛时间/s | Fitness/mm |
|---|---|---|---|
| Type 1 | 1 944 | 37 | 1.886 338 |
| Type 2 | 4 758 | 88 | 1.685 230 |
| Type 3 | 4 988 | 93 | 1.458 970 |
| Type 4 | 7 835 | 149 | 0.755 262 |
| 趋平率阈值 | 切换率阈值 | 迭代次数 | Fitness/mm |
|---|---|---|---|
| 0.95 | 0.50 | 14 194 | 0.740 816 |
| 0.98 | 0.50 | 39 418 | 0.750 376 |
| 0.90 | 0.50 | 7 835 | 0.755 262 |
| 0.55 | 6 547 | 0.812 778 | |
| 0.60 | 6 072 | 0.881 793 | |
| 0.85 | 0.50 | 5 768 | 0.898 836 |
| 0.55 | 5 373 | 0.916 278 | |
| 0.60 | 5 174 | 1.361 520 | |
| 0.75 | 0.50 | 3 726 | 1.232 095 |
| 0.55 | 3 169 | 1.391 849 | |
| 0.60 | 2 479 | 1.513 099 |
Tab.4 Different combinations of two parameters
| 趋平率阈值 | 切换率阈值 | 迭代次数 | Fitness/mm |
|---|---|---|---|
| 0.95 | 0.50 | 14 194 | 0.740 816 |
| 0.98 | 0.50 | 39 418 | 0.750 376 |
| 0.90 | 0.50 | 7 835 | 0.755 262 |
| 0.55 | 6 547 | 0.812 778 | |
| 0.60 | 6 072 | 0.881 793 | |
| 0.85 | 0.50 | 5 768 | 0.898 836 |
| 0.55 | 5 373 | 0.916 278 | |
| 0.60 | 5 174 | 1.361 520 | |
| 0.75 | 0.50 | 3 726 | 1.232 095 |
| 0.55 | 3 169 | 1.391 849 | |
| 0.60 | 2 479 | 1.513 099 |
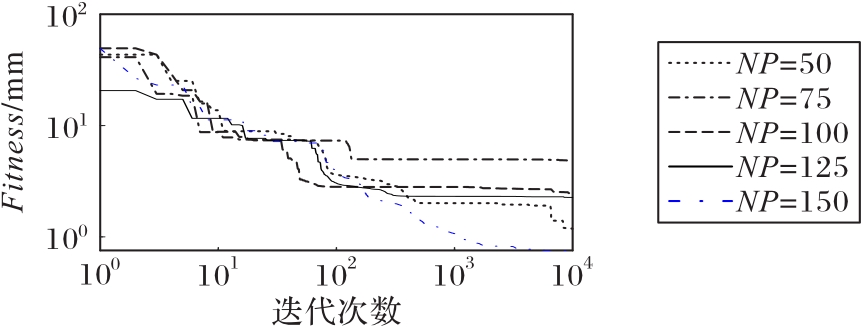
Fig.9 Comparison of fitness in populations with different scales

Fig.10 Performance of AMECoDEs-LO
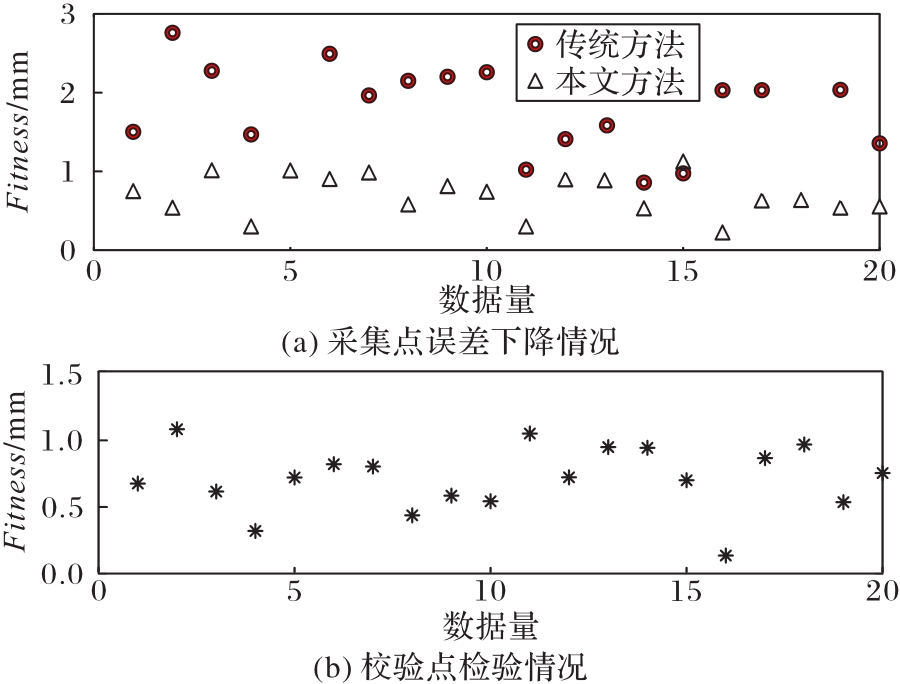
Fig.11 Accuracy verification comparison between joint system and traditional method

Fig.12 Performance of servo motor soft compensation
| 方案 | RSS | MAE | RMSE | SD |
|---|---|---|---|---|
| f1(x) | 54.932 | 0.609 | 0.741 | 0.422 |
| f2(x) | 14.248 | 0.281 | 0.377 | 0.252 |
| f3(x) | 11.727 | 0.265 | 0.342 | 0.217 |
Tab.5 Results of three schemes on different indexes
| 方案 | RSS | MAE | RMSE | SD |
|---|---|---|---|---|
| f1(x) | 54.932 | 0.609 | 0.741 | 0.422 |
| f2(x) | 14.248 | 0.281 | 0.377 | 0.252 |
| f3(x) | 11.727 | 0.265 | 0.342 | 0.217 |

Fig.13 Four different data collection areas
| 采集点数 | 机械臂 | 迭代次数 | 不同算法下的Fitness/mm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AMECoDEs-LO | AMECoDEs | PSO | GA | DE | IMPEDE | DESPS | |||
| 25 | R1 | 5 000 | 0.565 326 | 0.982 446 | 0.830 997 | 2.561 803 | 1.786 521 | 1.177 729 | 1.355 992 |
| 10 000 | 0.532 048 | 0.719 843 | 0.770 335 | 2.057 273 | 1.237 504 | 0.969 473 | 0.765 316 | ||
| 20 000 | 0.532 048 | 0.520 238 | 0.770 335 | 2.005 239 | 1.031 816 | 0.901 608 | 0.591 952 | ||
| R2 | 5 000 | 0.586 456 | 0.601 693 | 0.876 969 | 1.911 315 | 1.779 222 | 1.437 815 | 0.635 495 | |
| 10 000 | 0.585 898 | 0.573 826 | 0.741 698 | 1.852 563 | 1.092 410 | 1.135 834 | 0.599 992 | ||
| 20 000 | 0.585 463 | 0.568 397 | 0.718 350 | 1.787 653 | 1.086 331 | 0.872 544 | 0.599 821 | ||
| 50 | R1 | 5 000 | 0.726 315 | 1.148 595 | 1.870 231 | 3.041 135 | 1.593 779 | 0.744 047 | 2.842 765 |
| 10 000 | 0.716 056 | 0.980 794 | 1.683 181 | 2.551 561 | 1.517 333 | 0.668 578 | 2.753 945 | ||
| 20 000 | 0.677 934 | 0.744 180 | 1.644 061 | 2.550 204 | 1.329 803 | 0.665 560 | 0.933 366 | ||
| R2 | 5 000 | 0.664 622 | 1.983 563 | 1.975 506 | 3.164 919 | 2.273 540 | 0.665 486 | 2.731 112 | |
| 10 000 | 0.656 657 | 1.433 057 | 1.700 505 | 2.823 198 | 2.117 706 | 0.659 641 | 1.134 591 | ||
| 20 000 | 0.650 878 | 0.767 033 | 1.698 549 | 2.432 036 | 1.367 968 | 0.630 471 | 0.942 106 | ||
| 75 | R1 | 5 000 | 0.689 986 | 0.733 063 | 1.823 818 | 5.371 781 | 1.091 436 | 0.826 387 | 1.079 996 |
| 10 000 | 0.689 852 | 0.733 061 | 1.800 903 | 3.579 188 | 1.086 935 | 0.794 721 | 1.042 488 | ||
| 20 000 | 0.689 852 | 0.733 061 | 1.710 061 | 2.822 724 | 1.086 787 | 0.786 419 | 0.947 404 | ||
| R2 | 5 000 | 0.715 865 | 0.791 578 | 2.052 678 | 3.245 265 | 1.121 884 | 1.249 125 | 1.657 453 | |
| 10 000 | 0.690 582 | 0.707 336 | 1.832 811 | 3.087 309 | 1.121 884 | 1.161 167 | 1.158 240 | ||
| 20 000 | 0.689 395 | 0.707 065 | 1.690 035 | 2.948 902 | 1.121 884 | 0.799 485 | 0.983 625 | ||
| 100 | R1 | 5 000 | 0.774 702 | 1.172 915 | 3.391 321 | 2.591 554 | 1.719 753 | 1.893 676 | 2.185 051 |
| 10 000 | 0.755 262 | 0.798 311 | 2.135 919 | 2.423 959 | 1.594 458 | 1.797 107 | 1.613 516 | ||
| 20 000 | 0.755 262 | 0.798 311 | 1.484 260 | 2.423 633 | 1.511 633 | 1.162 780 | 1.336 374 | ||
| R2 | 5 000 | 0.767 045 | 0.850 048 | 1.590 780 | 2.787 817 | 2.201 815 | 2.319 529 | 2.590 174 | |
| 10 000 | 0.738 244 | 0.806 822 | 1.470 112 | 2.363 048 | 1.686 311 | 1.276 485 | 1.880 933 | ||
| 20 000 | 0.738 244 | 0.806 822 | 1.467 441 | 2.360 980 | 1.576 970 | 1.159 064 | 1.347 907 | ||
Tab.6 Fitness comparison of two manipulators under seven algorithms in four collection areas
| 采集点数 | 机械臂 | 迭代次数 | 不同算法下的Fitness/mm | ||||||
|---|---|---|---|---|---|---|---|---|---|
| AMECoDEs-LO | AMECoDEs | PSO | GA | DE | IMPEDE | DESPS | |||
| 25 | R1 | 5 000 | 0.565 326 | 0.982 446 | 0.830 997 | 2.561 803 | 1.786 521 | 1.177 729 | 1.355 992 |
| 10 000 | 0.532 048 | 0.719 843 | 0.770 335 | 2.057 273 | 1.237 504 | 0.969 473 | 0.765 316 | ||
| 20 000 | 0.532 048 | 0.520 238 | 0.770 335 | 2.005 239 | 1.031 816 | 0.901 608 | 0.591 952 | ||
| R2 | 5 000 | 0.586 456 | 0.601 693 | 0.876 969 | 1.911 315 | 1.779 222 | 1.437 815 | 0.635 495 | |
| 10 000 | 0.585 898 | 0.573 826 | 0.741 698 | 1.852 563 | 1.092 410 | 1.135 834 | 0.599 992 | ||
| 20 000 | 0.585 463 | 0.568 397 | 0.718 350 | 1.787 653 | 1.086 331 | 0.872 544 | 0.599 821 | ||
| 50 | R1 | 5 000 | 0.726 315 | 1.148 595 | 1.870 231 | 3.041 135 | 1.593 779 | 0.744 047 | 2.842 765 |
| 10 000 | 0.716 056 | 0.980 794 | 1.683 181 | 2.551 561 | 1.517 333 | 0.668 578 | 2.753 945 | ||
| 20 000 | 0.677 934 | 0.744 180 | 1.644 061 | 2.550 204 | 1.329 803 | 0.665 560 | 0.933 366 | ||
| R2 | 5 000 | 0.664 622 | 1.983 563 | 1.975 506 | 3.164 919 | 2.273 540 | 0.665 486 | 2.731 112 | |
| 10 000 | 0.656 657 | 1.433 057 | 1.700 505 | 2.823 198 | 2.117 706 | 0.659 641 | 1.134 591 | ||
| 20 000 | 0.650 878 | 0.767 033 | 1.698 549 | 2.432 036 | 1.367 968 | 0.630 471 | 0.942 106 | ||
| 75 | R1 | 5 000 | 0.689 986 | 0.733 063 | 1.823 818 | 5.371 781 | 1.091 436 | 0.826 387 | 1.079 996 |
| 10 000 | 0.689 852 | 0.733 061 | 1.800 903 | 3.579 188 | 1.086 935 | 0.794 721 | 1.042 488 | ||
| 20 000 | 0.689 852 | 0.733 061 | 1.710 061 | 2.822 724 | 1.086 787 | 0.786 419 | 0.947 404 | ||
| R2 | 5 000 | 0.715 865 | 0.791 578 | 2.052 678 | 3.245 265 | 1.121 884 | 1.249 125 | 1.657 453 | |
| 10 000 | 0.690 582 | 0.707 336 | 1.832 811 | 3.087 309 | 1.121 884 | 1.161 167 | 1.158 240 | ||
| 20 000 | 0.689 395 | 0.707 065 | 1.690 035 | 2.948 902 | 1.121 884 | 0.799 485 | 0.983 625 | ||
| 100 | R1 | 5 000 | 0.774 702 | 1.172 915 | 3.391 321 | 2.591 554 | 1.719 753 | 1.893 676 | 2.185 051 |
| 10 000 | 0.755 262 | 0.798 311 | 2.135 919 | 2.423 959 | 1.594 458 | 1.797 107 | 1.613 516 | ||
| 20 000 | 0.755 262 | 0.798 311 | 1.484 260 | 2.423 633 | 1.511 633 | 1.162 780 | 1.336 374 | ||
| R2 | 5 000 | 0.767 045 | 0.850 048 | 1.590 780 | 2.787 817 | 2.201 815 | 2.319 529 | 2.590 174 | |
| 10 000 | 0.738 244 | 0.806 822 | 1.470 112 | 2.363 048 | 1.686 311 | 1.276 485 | 1.880 933 | ||
| 20 000 | 0.738 244 | 0.806 822 | 1.467 441 | 2.360 980 | 1.576 970 | 1.159 064 | 1.347 907 | ||
| 采集点数 | 系统平均误差 | 校验点平均误差 | ||
|---|---|---|---|---|
| R1 | R2 | R1 | R2 | |
| 25 | 0.532 048 | 0.585 463 | 1.345 582 | 1.317 775 |
| 50 | 0.677 934 | 0.650 878 | 0.901 385 | 0.913 546 |
| 75 | 0.689 852 | 0.689 395 | 0.820 336 | 0.811 455 |
| 100 | 0.755 262 | 0.738 244 | 0.761 395 | 0.750 017 |
Tab.7 Convergence and verification results of system
| 采集点数 | 系统平均误差 | 校验点平均误差 | ||
|---|---|---|---|---|
| R1 | R2 | R1 | R2 | |
| 25 | 0.532 048 | 0.585 463 | 1.345 582 | 1.317 775 |
| 50 | 0.677 934 | 0.650 878 | 0.901 385 | 0.913 546 |
| 75 | 0.689 852 | 0.689 395 | 0.820 336 | 0.811 455 |
| 100 | 0.755 262 | 0.738 244 | 0.761 395 | 0.750 017 |
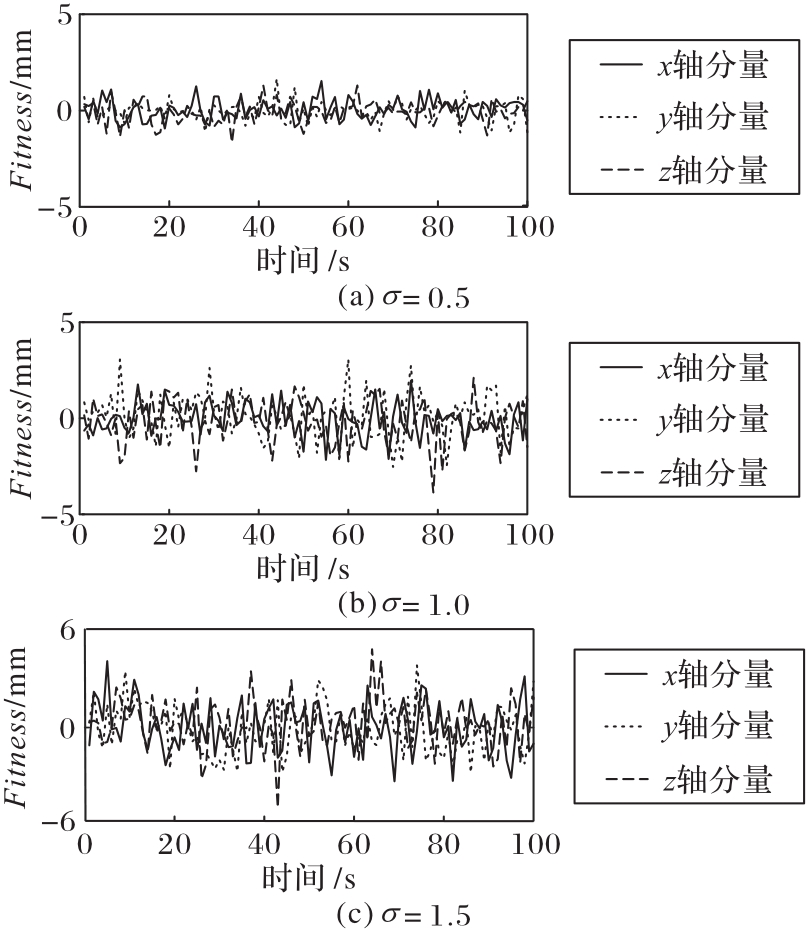
Fig.14 Three Gaussian white noise with different intensities
评价 对象 | σ=0.0 | σ=0.5 | σ=1.0 | σ=1.5 | |||
|---|---|---|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | 优化前 | 优化后 | ||
系统 整体 | 0.755 | 0.749 | 0.807 | 0.716 | 0.823 | 0.724 | 0.840 |
| x轴 | 0.366 | 0.367 | 0.398 | 0.352 | 0.414 | 0.373 | 0.410 |
| y轴 | 0.371 | 0.372 | 0.444 | 0.367 | 0.424 | 0.352 | 0.412 |
| z轴 | 0.385 | 0.382 | 0.412 | 0.393 | 0.366 | 0.397 | 0.464 |
Tab.8 Fitness of system model after adding noise with different intensities
评价 对象 | σ=0.0 | σ=0.5 | σ=1.0 | σ=1.5 | |||
|---|---|---|---|---|---|---|---|
| 优化前 | 优化后 | 优化前 | 优化后 | 优化前 | 优化后 | ||
系统 整体 | 0.755 | 0.749 | 0.807 | 0.716 | 0.823 | 0.724 | 0.840 |
| x轴 | 0.366 | 0.367 | 0.398 | 0.352 | 0.414 | 0.373 | 0.410 |
| y轴 | 0.371 | 0.372 | 0.444 | 0.367 | 0.424 | 0.352 | 0.412 |
| z轴 | 0.385 | 0.382 | 0.412 | 0.393 | 0.366 | 0.397 | 0.464 |

Fig.15 Convergence of AMECoDEs-LO under noise with different intensities
| 1 | WEN B, TAO B, LI G F. Research status and tendency of intelligent industrial robot [J]. Journal of Physics: Conference Series, 2019, 1302(3): No.032050. 10.1088/1742-6596/1302/3/032050 |
| 2 | LEVINE S, PASTOR P, KRIZHEVSKY A, et al. Learning hand-eye coordination for robotic grasping with deep learning and large-scale data collection [J]. The International Journal of Robotics Research, 2018, 37(4/5): 421-436. 10.1177/0278364917710318 |
| 3 | LI Q W, WANG Z Q, SHEN C W, et al. Method for horizontal alignment deviation measurement using binocular camera without common target [J]. IEEE Access, 2020, 8: 184540-184549. 10.1109/access.2020.3029593 |
| 4 | HAN Y, CHU Z N, ZHAO K. Target positioning method in binocular vision manipulator control based on improved Canny operator [J]. Multimeia Tools and Application, 2020, 79: 9599-9614. 10.1007/s11042-019-08140-9 |
| 5 | XIAO P F, JU H H, LI Q D, et al. A new fixed axis-invariant based calibration approach to improve absolute positioning accuracy of manipulators [J]. IEEE Access, 2020, 8: 134224-134232. 10.1109/ACCESS.2020.3011328 |
| 6 | LV Y F, NA J, YANG Q M, et al. Online adaptive optimal control for continuous-time nonlinear systems with completely unknown dynamics [J]. International Journal of Control, 2016, 89(1): 99-112. 10.1080/00207179.2015.1060362 |
| 7 | WANG K S. Application of genetic algorithms to robot kinematics calibration [J]. International Journal of Systems Science, 2009, 40(2): 147-153. 10.1080/00207720802630644 |
| 8 | XU X H, ZHU D H, ZHANG H Y, et al. TCP-based calibration in robot-assisted belt grinding of aero-engine blades using scanner measurements [J]. The International Journal of Advanced Manufacturing Technology, 2017, 90(1/2/3/4): 635-647. 10.1007/s00170-016-9331-8 |
| 9 | 吴庆华, 万偲, 李子奇,等. 机器人线结构光视觉引导系统的手眼标定方法[J]. 制造业自动化, 2021, 43(11):29-34,40. 10.3969/j.issn.1009-0134.2021.11.008 |
| WU Q H, WAN C, LI Z Q, et al. Hand eye calibration method of robot line structured light vision guidance system [J]. Manufacturing Automation,2021, 43(11):29-34,40. 10.3969/j.issn.1009-0134.2021.11.008 | |
| 10 | HUA J, ZENG L C. Hand-eye calibration algorithm based on an optimized neural network [J]. Actuators, 2021, 10(4): No.85. 10.3390/act10040085 |
| 11 | BAI J, ZHANG Y C, QIN X S, et al. Hybrid calibration and detection approach for mobile robotic manufacturing systems [J]. Industrial Robot, 2020, 47(4): 511-519. 10.1108/ir-09-2019-0194 |
| 12 | WANG H X, LU X, HU Z Y, et al. A vision-based fully-automatic calibration method for hand-eye serial robot [J]. Industrial Robot, 2015, 42(1): 64-73. 10.1108/ir-06-2014-0352 |
| 13 | MISEIKIS J, GLETTE K, ELLE O J, et al. Automatic calibration of a robot manipulator and multi 3D camera system [C]// Proceedings of the 2016 IEEE/SICE International Symposium on System Integration. Piscataway: IEEE, 2016: 735-741. 10.1109/sii.2016.7844087 |
| 14 | YIN S B, REN Y J, ZHU J G, et al. A vision-based self-calibration method for robotic visual inspection systems [J]. Sensors, 2013, 13(12): 16565-16582. 10.3390/s131216565 |
| 15 | YANG C G, JIANG Y M, HE W, et al. Adaptive parameter estimation and control design for robot manipulators with finite-time convergence [J]. IEEE Transactions on Industrial Electronics, 2018, 65(10): 8112-8123. 10.1109/tie.2018.2803773 |
| 16 | CUI L Z, LI G H, ZHU Z X, et al. Adaptive multiple-elites-guided composite differential evolution algorithm with a shift mechanism [J]. Information Sciences, 2018, 422: 122-143. 10.1016/j.ins.2017.09.002 |
| 17 | DENG W, SHANG S F, CAI X, et al. Quantum differential evolution with cooperative coevolution framework and hybrid mutation strategy for large scale optimization [J]. Knowledge-Based Systems, 2021, 224: No.107080. 10.1016/j.knosys.2021.107080 |
| 18 | AHN M S, CHAE H, NOH D, et al. Analysis and noise modeling of the Intel RealSense D435 for mobile robots [C]// Proceedings of the 2019 16th International Conference on Ubiquitous Robots . Piscataway: IEEE, 2019: 707-711. 10.1109/urai.2019.8768489 |
| 19 | ZHANG Z Y. A flexible new technique for camera calibration [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2000, 22(11): 1330-1334. 10.1109/34.888718 |
| 20 | TONG L Y, DONG M G, JING C. An improved multi-population ensemble differential evolution [J]. Neurocomputing, 2018, 290: 130-147. 10.1016/j.neucom.2018.02.038 |
| 21 | GUO S M, YANG C C, HSU P H, et al. Improving differential evolution with a successful-parent-selecting framework [J]. IEEE Transactions on Evolutionary Computation, 2015, 19(5): 717-730. 10.1109/tevc.2014.2375933 |
| [1] | Junchi GE, Weihua ZHAO. Distance weighted discriminant analysis based on robust principal component analysis for matrix data [J]. Journal of Computer Applications, 2024, 44(7): 2073-2079. |
| [2] | Xuebin CHEN, Zhiqiang REN, Hongyang ZHANG. Review on security threats and defense measures in federated learning [J]. Journal of Computer Applications, 2024, 44(6): 1663-1672. |
| [3] | Weina DONG, Jia LIU, Xiaozhong PAN, Lifeng CHEN, Wenquan SUN. High-capacity robust image steganography scheme based on encoding-decoding network [J]. Journal of Computer Applications, 2024, 44(3): 772-779. |
| [4] | Jintao RAO, Zhe CUI. Electronic voting scheme based on SM2 threshold blind signature [J]. Journal of Computer Applications, 2024, 44(2): 512-518. |
| [5] | Jie HUANG, Ruizi WU, Junli LI. Efficient adaptive robustness optimization algorithm for complex networks [J]. Journal of Computer Applications, 2024, 44(11): 3530-3539. |
| [6] | Han WANG, Yuan WAN, Dong WANG, Yiming DING. Robust weight matrix combination selection method of broad learning system [J]. Journal of Computer Applications, 2024, 44(10): 3032-3038. |
| [7] | Xuyan ZHAO, Yunhe CUI, Chaohui JIANG, Qing QIAN, Guowei SHEN, Chun GUO, Xianchao LI. CHAIN: edge computing node placement algorithm based on overlapping domination [J]. Journal of Computer Applications, 2023, 43(9): 2812-2818. |
| [8] | Jian GAO, Zhi LI, Bin FAN, Chuanxian JIANG. Efficient robust zero-watermarking algorithm for 3D medical images based on ray-casting sampling and quaternion orthogonal moment [J]. Journal of Computer Applications, 2023, 43(4): 1191-1197. |
| [9] | Mengting GE, Minghua WAN. Feature extraction model based on neighbor supervised locally invariant robust principal component analysis [J]. Journal of Computer Applications, 2023, 43(4): 1013-1020. |
| [10] | Mengdi SUN, Zhonggui SUN, Xu KONG, Hongyan HAN. Design of guided adaptive mathematical morphology for multimodal images [J]. Journal of Computer Applications, 2023, 43(2): 560-566. |
| [11] | Yuyu MENG, Jing GUO. Link prediction algorithm based on information entropy improved PCA model [J]. Journal of Computer Applications, 2022, 42(9): 2823-2829. |
| [12] | GAO Gong, YANG Hongyu, LIU Hong. 3D point cloud face recognition based on deep learning [J]. Journal of Computer Applications, 2021, 41(9): 2736-2740. |
| [13] | LI Xingfeng, HUANG Yuqing, REN Zhenwen, LI Yihong. Robust multi-view clustering algorithm based on adaptive neighborhood [J]. Journal of Computer Applications, 2021, 41(4): 1093-1099. |
| [14] | Yunpeng GONG, Zhiyong ZENG, Feng YE. Person re-identification method based on grayscale feature enhancement [J]. Journal of Computer Applications, 2021, 41(12): 3590-3595. |
| [15] | Hua LI, Guifu LU, Qinru YU. Manifold regularized nonnegative matrix factorization based on clean data [J]. Journal of Computer Applications, 2021, 41(12): 3492-3498. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||