


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (4): 1071-1078.DOI: 10.11772/j.issn.1001-9081.2022020287
Special Issue: 人工智能
• Artificial intelligence • Previous Articles Next Articles
Yu WANG( ), Zilin FAN, Tianjun REN, Xiaofei JI
), Zilin FAN, Tianjun REN, Xiaofei JI
Received:2022-03-11
Revised:2022-05-26
Accepted:2022-05-30
Online:2022-08-16
Published:2023-04-10
Contact:
Yu WANG
About author:FAN Zilin, born in 1998, M. S. candidate. Her research interests include machine reasoning, information fusion.Supported by:
王昱(), 范子琳, 任田君, 姬晓飞
通讯作者:
王昱
作者简介:范子琳(1998—),女,辽宁锦州人,硕士研究生,主要研究方向:机器推理、信息融合;基金资助:CLC Number:
Yu WANG, Zilin FAN, Tianjun REN, Xiaofei JI. Aerial target identification method based on switching reasoning evidential network under incomplete information[J]. Journal of Computer Applications, 2023, 43(4): 1071-1078.
王昱, 范子琳, 任田君, 姬晓飞. 不完备信息下基于切换推理证据网络的空中目标识别方法[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1071-1078.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022020287
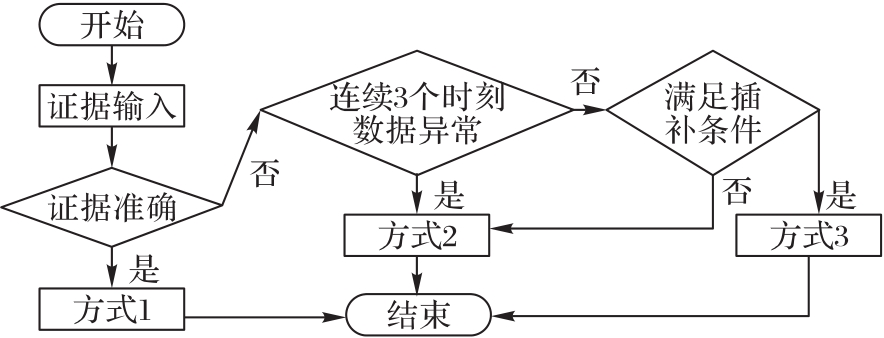
Fig. 1 Evidence input mode switching process
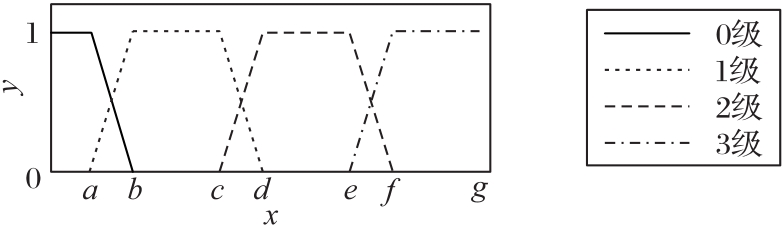
Fig. 2 Four-level affinity curve
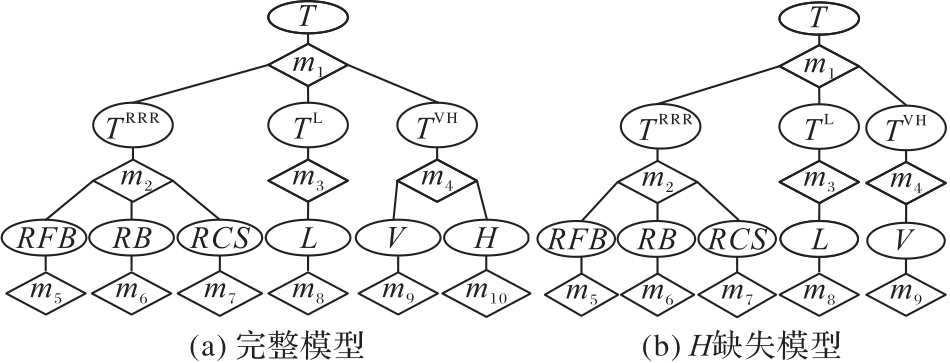
Fig. 3 Target identification evidential network model
| 节点 | 含义 | 识别框架 | 说明 |
|---|---|---|---|
| T | 目标机型 | {SF,F,SB, B,A,HE, US} | {隐身战斗机,普通战斗机,隐身轰炸机,普通轰炸机,预警机,直升机,无人侦察机} |
RCS、RFB、RB 规则融合T | ― | ― | |
| L规则融合T | ― | ― | |
| VH规则融合T | ― | ― | |
| V | 速度 | {0,1,2,3} | {极小,小,高,极高} |
| H | 飞行高度 | {0,1,2,3} | {极低,低,高,极高} |
| L | 机身长度 | {0,1,2,3} | {极短,短,长,极长} |
| RCS | 雷达反射面积 | {0,1,2,3} | {极小,小,大,极大} |
| RFB | 雷达频率段 | {0,1} | {敏捷,固定} |
| RB | 雷达波束方向 | {0,1} | {空对空,空对地} |
Tab. 1 Description of network model variables
| 节点 | 含义 | 识别框架 | 说明 |
|---|---|---|---|
| T | 目标机型 | {SF,F,SB, B,A,HE, US} | {隐身战斗机,普通战斗机,隐身轰炸机,普通轰炸机,预警机,直升机,无人侦察机} |
RCS、RFB、RB 规则融合T | ― | ― | |
| L规则融合T | ― | ― | |
| VH规则融合T | ― | ― | |
| V | 速度 | {0,1,2,3} | {极小,小,高,极高} |
| H | 飞行高度 | {0,1,2,3} | {极低,低,高,极高} |
| L | 机身长度 | {0,1,2,3} | {极短,短,长,极长} |
| RCS | 雷达反射面积 | {0,1,2,3} | {极小,小,大,极大} |
| RFB | 雷达频率段 | {0,1} | {敏捷,固定} |
| RB | 雷达波束方向 | {0,1} | {空对空,空对地} |
| 证据 | 各焦元变量作用区间 | |||
|---|---|---|---|---|
| {0} | {1} | {2} | {3} | |
| V/(km·h-1) | 0~350 | 280~1 000 | 650~2 400 | 1 300~3 600 |
| H/m | 0~200 | 100~6 000 | 3 000~20 000 | 10 000~36 000 |
| L/m | 0~10 | 5~30 | 15~65 | 45~90 |
| RCS/m2 | 0~1 | 0.5~6 | 2~20 | 10~90 |
Tab. 2 Quantitative evidence grade intervals
| 证据 | 各焦元变量作用区间 | |||
|---|---|---|---|---|
| {0} | {1} | {2} | {3} | |
| V/(km·h-1) | 0~350 | 280~1 000 | 650~2 400 | 1 300~3 600 |
| H/m | 0~200 | 100~6 000 | 3 000~20 000 | 10 000~36 000 |
| L/m | 0~10 | 5~30 | 15~65 | 45~90 |
| RCS/m2 | 0~1 | 0.5~6 | 2~20 | 10~90 |
Fig. 4 Mapping relationship between target types and evidence variables
| 规则库 | 序号 | 条件 | [机型T,信度β] | [θ1,θ2] |
|---|---|---|---|---|
| Ⅰ | 1 | V=0,H=0 | [US,1] | [0.6,0.8] |
| 2 | V=0,H=1 | [US,1] | [0.6,0.8] | |
| 3 | V=1,H=1 | [F,1] | [0.6,0.8] | |
| 4 | V=1,H=2 | [F,0.2][SB,0.4][A,0.1][HE,0.1][{F,SB,A,HE},0.2] | [0.9,1] | |
| 5 | V=1,H=3 | [F,0.2][B,0.2][A,0.2][HE,0.2][{F,B,A,HE},0.2] | [0.9,1] | |
| 6 | V=2,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 7 | V=2,H=2 | [SF,0.1][F,0.4][SB,0.2][B,0.1][{SF,F,SB,B},0.2] | [0.9,1] | |
| 8 | V=2,H=3 | [SF,0.2][F,0.2][B,0.2][A,0.2][{SF,F,B,A},0.2] | [0.9,1] | |
| 9 | V=3,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 10 | V=3,H=2 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 11 | V=3,H=3 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 12 | V=0,H缺失 | [US,1] | [0.6,0.8] | |
| 13 | V=1,H缺失 | [F,0.15][SB,0.15][B,0.15][A,0.15][HE,0.15][{F,SB,B,A,HE},0.25] | [0.9,1] | |
| 14 | V=2,H缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][A,0.15][{SF,F,SB,B,A},0.25] | [0.9,1] | |
| 15 | V=3,H缺失 | [SF.0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 16 | V缺失,H=0 | [US,1] | [0.6,0.8] | |
| 17 | V缺失,H=1 | [SF,0.3][F,0.3][US,0.3][{SF,F,US},0.1] | [0.9,1] | |
| 18 | V缺失,H=2 | [SF,0.15][F,0.15][SB,0.3][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 19 | V缺失,H=3 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| Ⅱ | 1 | L=1 | [SF,0.1][F,0.3][SB,0.1][B,0.1][HE,0.15][US,0.15][{SF,F,SB,HE,US},0.1] | [0.9,1] |
| 2 | L=2 | [B,0.2][A,0.2][HE,0.2][US,0.2][{B,A,HE,US},0.2] | [0.9,1] | |
| 3 | L=3 | [A,1] | [0.6,0.8] | |
| Ⅲ | 1 | RCS=0,RFB=1,RB=1 | [SF,0.85][SB,0.1][{SF,SB},0.05] | [0.9,1] |
| 2 | RCS=0,RFB=1,RB=1 | [SF,0.1][SB,0.85][{SF,SB},0.05] | [0.9,1] | |
| 3 | RCS=1,RFB=1,RB=0 | [SF,0.1][F,0.4][SB,0.05][B,0.05][HE,0.3][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 4 | RCS=1,RFB=1,RB=1 | [SF,0.05][F,0.1][SB,0.1][B,0.3][HE,0.3[{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 5 | RCS=2,RFB=1,RB=0 | [F,0.8][B,0.1][{F,B},0.1] | [0.9,1] | |
| 6 | RCS=2,RFB=1,RB=1 | [F,0.1][B,0.8][{F,B},0.1] | [0.9,1] | |
| 7 | RCS=2,RFB=0,RB=0 | [US,1] | [0.6,0.8] | |
| 8 | RCS=2,RFB=0,RB=1 | [US,1] | [0.6,0.8] | |
| 9 | RCS=3,RFB=0,RB=0 | [A,1] | [0.6,0.8] | |
| 10 | RCS=3,RFB=0,RB=1 | [A,1] | [0.6,0.8] | |
| 11 | RCS=0,RFB,RB缺失 | [SF,0.4][SB,0.4][{SF,SB},0.2] | [0.9,1] | |
| 12 | RCS=1,RFB,RB缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| 13 | RCS=2,RFB,RB缺失 | [F,0.3][B,0.3][US,0.3][{F,B,US},0.1] | [0.9,1] | |
| 14 | RCS=3,RFB,RB缺失 | [A,1] | [0.6,0.8] | |
| 15 | RCS缺失,RFB=0,RB=0 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 16 | RCS缺失,RFB=0,RB=1 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 17 | RCS缺失,RFB=1,RB=0 | [SF,0.25][F,0.25][SB,0.05][B,0.05][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 18 | RCS缺失,RFB=1,RB=1 | [SF,0.05][F,0.05][SB,0.25][B,0.25][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] |
Tab. 3 Rule bases
| 规则库 | 序号 | 条件 | [机型T,信度β] | [θ1,θ2] |
|---|---|---|---|---|
| Ⅰ | 1 | V=0,H=0 | [US,1] | [0.6,0.8] |
| 2 | V=0,H=1 | [US,1] | [0.6,0.8] | |
| 3 | V=1,H=1 | [F,1] | [0.6,0.8] | |
| 4 | V=1,H=2 | [F,0.2][SB,0.4][A,0.1][HE,0.1][{F,SB,A,HE},0.2] | [0.9,1] | |
| 5 | V=1,H=3 | [F,0.2][B,0.2][A,0.2][HE,0.2][{F,B,A,HE},0.2] | [0.9,1] | |
| 6 | V=2,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 7 | V=2,H=2 | [SF,0.1][F,0.4][SB,0.2][B,0.1][{SF,F,SB,B},0.2] | [0.9,1] | |
| 8 | V=2,H=3 | [SF,0.2][F,0.2][B,0.2][A,0.2][{SF,F,B,A},0.2] | [0.9,1] | |
| 9 | V=3,H=1 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 10 | V=3,H=2 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 11 | V=3,H=3 | [SF,0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 12 | V=0,H缺失 | [US,1] | [0.6,0.8] | |
| 13 | V=1,H缺失 | [F,0.15][SB,0.15][B,0.15][A,0.15][HE,0.15][{F,SB,B,A,HE},0.25] | [0.9,1] | |
| 14 | V=2,H缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][A,0.15][{SF,F,SB,B,A},0.25] | [0.9,1] | |
| 15 | V=3,H缺失 | [SF.0.4][F,0.4][{SF,F},0.2] | [0.9,1] | |
| 16 | V缺失,H=0 | [US,1] | [0.6,0.8] | |
| 17 | V缺失,H=1 | [SF,0.3][F,0.3][US,0.3][{SF,F,US},0.1] | [0.9,1] | |
| 18 | V缺失,H=2 | [SF,0.15][F,0.15][SB,0.3][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 19 | V缺失,H=3 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| Ⅱ | 1 | L=1 | [SF,0.1][F,0.3][SB,0.1][B,0.1][HE,0.15][US,0.15][{SF,F,SB,HE,US},0.1] | [0.9,1] |
| 2 | L=2 | [B,0.2][A,0.2][HE,0.2][US,0.2][{B,A,HE,US},0.2] | [0.9,1] | |
| 3 | L=3 | [A,1] | [0.6,0.8] | |
| Ⅲ | 1 | RCS=0,RFB=1,RB=1 | [SF,0.85][SB,0.1][{SF,SB},0.05] | [0.9,1] |
| 2 | RCS=0,RFB=1,RB=1 | [SF,0.1][SB,0.85][{SF,SB},0.05] | [0.9,1] | |
| 3 | RCS=1,RFB=1,RB=0 | [SF,0.1][F,0.4][SB,0.05][B,0.05][HE,0.3][{SF,F,SB,B,HE},0.1] | [0.9,1] | |
| 4 | RCS=1,RFB=1,RB=1 | [SF,0.05][F,0.1][SB,0.1][B,0.3][HE,0.3[{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 5 | RCS=2,RFB=1,RB=0 | [F,0.8][B,0.1][{F,B},0.1] | [0.9,1] | |
| 6 | RCS=2,RFB=1,RB=1 | [F,0.1][B,0.8][{F,B},0.1] | [0.9,1] | |
| 7 | RCS=2,RFB=0,RB=0 | [US,1] | [0.6,0.8] | |
| 8 | RCS=2,RFB=0,RB=1 | [US,1] | [0.6,0.8] | |
| 9 | RCS=3,RFB=0,RB=0 | [A,1] | [0.6,0.8] | |
| 10 | RCS=3,RFB=0,RB=1 | [A,1] | [0.6,0.8] | |
| 11 | RCS=0,RFB,RB缺失 | [SF,0.4][SB,0.4][{SF,SB},0.2] | [0.9,1] | |
| 12 | RCS=1,RFB,RB缺失 | [SF,0.15][F,0.15][SB,0.15][B,0.15][HE,0.15][{SF,F,SB,B,HE},0.25] | [0.9,1] | |
| 13 | RCS=2,RFB,RB缺失 | [F,0.3][B,0.3][US,0.3][{F,B,US},0.1] | [0.9,1] | |
| 14 | RCS=3,RFB,RB缺失 | [A,1] | [0.6,0.8] | |
| 15 | RCS缺失,RFB=0,RB=0 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 16 | RCS缺失,RFB=0,RB=1 | [A,0.4][US,0.4][{A,US},0.2] | [0.9,1] | |
| 17 | RCS缺失,RFB=1,RB=0 | [SF,0.25][F,0.25][SB,0.05][B,0.05][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] | |
| 18 | RCS缺失,RFB=1,RB=1 | [SF,0.05][F,0.05][SB,0.25][B,0.25][HE,0.25][{SF,F,SB,B,HE},0.15] | [0.9,1] |
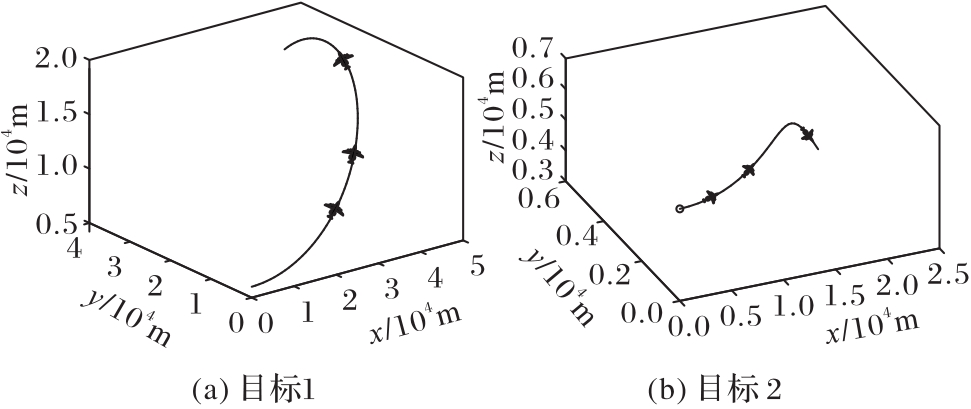
Fig. 5 Detection of target flight trajectory
| 目标 | 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|---|
| 1 | t1 | 900.05 | 6 000.0 | 17.32 | 0.90 | 1 | 0 |
| t2 | 892.53 | 7 280.4 | 14.38 | 2.00 | 1 | 0 | |
| t3 | 866.29 | 10 773.0 | 16.54 | 1.50 | 1 | 0 | |
| t4 | 841.25 | 15 102.0 | 17.32 | 1.30 | 1 | 0 | |
| t5 | 815.98 | 18 155.0 | 16.39 | 0.75 | 1 | 0 | |
| t6 | 854.47 | 18 200.0 | 16.00 | 1.51 | 1 | 0 | |
| t7 | 902.89 | 13 900.0 | 17.34 | 2.00 | 1 | 0 | |
| t8 | 966.31 | 3 237.8 | 16.97 | 2.40 | 1 | 0 | |
| 2 | t1 | ф | 6 050.0 | 21.00 | ф | 1 | 1 |
| t2 | 398.70 | 6 127.1 | 19.00 | 0.79 | 1 | 1 | |
| t3 | 6 277.9 | 19.54 | ф | 1 | 1 | ||
| t4 | ф | 6 414.5 | 18.00 | ф | 1 | ||
| t5 | ф | 6 406.9 | ф | ф | 1 | ||
| t6 | 406.20 | 5 988.2 | 20.90 | 0.90 | 1 | 1 | |
| t7 | 416.20 | 5 590.9 | 17.34 | 0.84 | 1 | 1 | |
| t8 | 4 771.4 | 19.97 | ф | 1 | 1 |
Tab. 4 Attribute data of target 1 and 2
| 目标 | 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|---|
| 1 | t1 | 900.05 | 6 000.0 | 17.32 | 0.90 | 1 | 0 |
| t2 | 892.53 | 7 280.4 | 14.38 | 2.00 | 1 | 0 | |
| t3 | 866.29 | 10 773.0 | 16.54 | 1.50 | 1 | 0 | |
| t4 | 841.25 | 15 102.0 | 17.32 | 1.30 | 1 | 0 | |
| t5 | 815.98 | 18 155.0 | 16.39 | 0.75 | 1 | 0 | |
| t6 | 854.47 | 18 200.0 | 16.00 | 1.51 | 1 | 0 | |
| t7 | 902.89 | 13 900.0 | 17.34 | 2.00 | 1 | 0 | |
| t8 | 966.31 | 3 237.8 | 16.97 | 2.40 | 1 | 0 | |
| 2 | t1 | ф | 6 050.0 | 21.00 | ф | 1 | 1 |
| t2 | 398.70 | 6 127.1 | 19.00 | 0.79 | 1 | 1 | |
| t3 | 6 277.9 | 19.54 | ф | 1 | 1 | ||
| t4 | ф | 6 414.5 | 18.00 | ф | 1 | ||
| t5 | ф | 6 406.9 | ф | ф | 1 | ||
| t6 | 406.20 | 5 988.2 | 20.90 | 0.90 | 1 | 1 | |
| t7 | 416.20 | 5 590.9 | 17.34 | 0.84 | 1 | 1 | |
| t8 | 4 771.4 | 19.97 | ф | 1 | 1 |
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.208 5 | 0.364 1 | 0.218 9 | 0.208 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t2 | 0.147 3 | 0.546 7 | 0.158 7 | 0.147 3 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.102 0 | 0.684 1 | 0.111 9 | 0.102 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t4 | 0.075 8 | 0.848 2 | 0.000 0 | 0.075 8 | 0.000 0 | 0.000 0 | 0.000 0 |
| t5 | 0.000 0 | 0.924 4 | 0.000 0 | 0.075 3 | 0.000 0 | 0.000 3 | 0.000 0 |
| t6 | 0.024 2 | 0.938 8 | 0.000 0 | 0.037 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.022 6 | 0.929 0 | 0.019 8 | 0.029 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.030 1 | 0.969 9 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 |
Tab. 5 Identification results of SR-EN method for target 1
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.208 5 | 0.364 1 | 0.218 9 | 0.208 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t2 | 0.147 3 | 0.546 7 | 0.158 7 | 0.147 3 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.102 0 | 0.684 1 | 0.111 9 | 0.102 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t4 | 0.075 8 | 0.848 2 | 0.000 0 | 0.075 8 | 0.000 0 | 0.000 0 | 0.000 0 |
| t5 | 0.000 0 | 0.924 4 | 0.000 0 | 0.075 3 | 0.000 0 | 0.000 3 | 0.000 0 |
| t6 | 0.024 2 | 0.938 8 | 0.000 0 | 0.037 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.022 6 | 0.929 0 | 0.019 8 | 0.029 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.030 1 | 0.969 9 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | 2 | 1 | 1 | 2 | 1 | 1 |
| t2 | 1 | 1 | 1 | 1 | 1 | 1 |
| t3 | 2 | 1 | 1 | 2 | 1 | 1 |
| t4 | 2 | 1 | 1 | 2 | 1 | 3 |
| t5 | 2 | 1 | 3 | 2 | 3 | 1 |
| t6 | 1 | 1 | 1 | 1 | 1 | 1 |
| t7 | 1 | 1 | 1 | 1 | 1 | 1 |
| t8 | 2 | 1 | 1 | 2 | 1 | 1 |
Tab. 6 Selection and switching for evidence input modes in target 2 identification
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | 2 | 1 | 1 | 2 | 1 | 1 |
| t2 | 1 | 1 | 1 | 1 | 1 | 1 |
| t3 | 2 | 1 | 1 | 2 | 1 | 1 |
| t4 | 2 | 1 | 1 | 2 | 1 | 3 |
| t5 | 2 | 1 | 3 | 2 | 3 | 1 |
| t6 | 1 | 1 | 1 | 1 | 1 | 1 |
| t7 | 1 | 1 | 1 | 1 | 1 | 1 |
| t8 | 2 | 1 | 1 | 2 | 1 | 1 |
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | / | 0,0,0.8, 0,0.2 | 0,0.48, 0.32,0,0.2 | / | 1 | 1 |
| t2 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.59, 0.21,0,0.2 | 0.33,0.46, 0,0,0.2 | 1 | 1 |
| t3 | / | 0,0,0.8, 0,0.2 | 0,0.55, 0.24,0,0.2 | / | 1 | 1 |
| t4 | / | 0,0,0.8, 0,0.2 | 0,0.64, 0.16,0,0.2 | / | 1 | 1 |
| t5 | / | 0,0,0.8, 0,0.2 | 0,0.68, 0.12,0,0.2 | / | 1 | 1 |
| t6 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.43, 0.31,0,0.2 | 0.16,0.64, 0,0,0.2 | 1 | 1 |
| t7 | 0,0.8,0, 0,0.2 | 0,0.11, 0.69,0,0.2 | 0,0.68, 0.12,0,0.2 | 0.25,0.54, 0,0,0.2 | 1 | 1 |
| t8 | / | 0,0.33, 0.47,0,0.2 | 0,0.53, 0.27,0,0.2 | / | 1 | 1 |
Tab. 7 Evidence correction and reliability conversion results in target 2 identification
| 时刻 | V/(km·h-1) | H/m | L/m | RCS/m2 | RFB | RB |
|---|---|---|---|---|---|---|
| t1 | / | 0,0,0.8, 0,0.2 | 0,0.48, 0.32,0,0.2 | / | 1 | 1 |
| t2 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.59, 0.21,0,0.2 | 0.33,0.46, 0,0,0.2 | 1 | 1 |
| t3 | / | 0,0,0.8, 0,0.2 | 0,0.55, 0.24,0,0.2 | / | 1 | 1 |
| t4 | / | 0,0,0.8, 0,0.2 | 0,0.64, 0.16,0,0.2 | / | 1 | 1 |
| t5 | / | 0,0,0.8, 0,0.2 | 0,0.68, 0.12,0,0.2 | / | 1 | 1 |
| t6 | 0,0.8,0, 0,0.2 | 0,0,0.8, 0,0.2 | 0,0.43, 0.31,0,0.2 | 0.16,0.64, 0,0,0.2 | 1 | 1 |
| t7 | 0,0.8,0, 0,0.2 | 0,0.11, 0.69,0,0.2 | 0,0.68, 0.12,0,0.2 | 0.25,0.54, 0,0,0.2 | 1 | 1 |
| t8 | / | 0,0.33, 0.47,0,0.2 | 0,0.53, 0.27,0,0.2 | / | 1 | 1 |
| 规则 | t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 |
|---|---|---|---|---|---|---|---|---|
| m2规则 | Ⅲ18 | Ⅲ4 | Ⅲ18 | Ⅲ18 | Ⅲ18 | Ⅲ4 | Ⅲ4 | Ⅲ18 |
| m3规则 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 |
| m4规则 | Ⅰ18 | Ⅰ4 | Ⅰ18 | Ⅰ18 | Ⅰ18 | Ⅰ4 | Ⅰ4 | Ⅰ18 |
Tab. 8 Rule selection and switching in target 2 identification
| 规则 | t1 | t2 | t3 | t4 | t5 | t6 | t7 | t8 |
|---|---|---|---|---|---|---|---|---|
| m2规则 | Ⅲ18 | Ⅲ4 | Ⅲ18 | Ⅲ18 | Ⅲ18 | Ⅲ4 | Ⅲ4 | Ⅲ18 |
| m3规则 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 | Ⅱ1 |
| m4规则 | Ⅰ18 | Ⅰ4 | Ⅰ18 | Ⅰ18 | Ⅰ18 | Ⅰ4 | Ⅰ4 | Ⅰ18 |
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.186 6 | 0.216 0 | 0.357 3 | 0.239 9 | 0.000 0 | 0.000 2 | 0.000 0 |
| t2 | 0.000 0 | 0.282 6 | 0.466 4 | 0.250 6 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.052 7 | 0.194 1 | 0.549 6 | 0.202 9 | 0.000 0 | 0.000 7 | 0.000 0 |
| t4 | 0.044 9 | 0.156 0 | 0.635 8 | 0.161 8 | 0.000 0 | 0.000 5 | 0.000 0 |
| t5 | 0.044 6 | 0.113 4 | 0.719 0 | 0.122 0 | 0.000 0 | 0.000 1 | 0.000 0 |
| t6 | 0.000 0 | 0.104 5 | 0.786 0 | 0.094 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.000 0 | 0.097 9 | 0.823 0 | 0.079 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.031 7 | 0.077 8 | 0.817 3 | 0.073 0 | 0.000 0 | 0.000 2 | 0.000 0 |
Tab. 9 Identification results of SR-EN method for target 2
| 时刻 | 不同机型的识别结果 | ||||||
|---|---|---|---|---|---|---|---|
| SF | F | SB | B | A | HE | US | |
| t1 | 0.186 6 | 0.216 0 | 0.357 3 | 0.239 9 | 0.000 0 | 0.000 2 | 0.000 0 |
| t2 | 0.000 0 | 0.282 6 | 0.466 4 | 0.250 6 | 0.000 0 | 0.000 0 | 0.000 0 |
| t3 | 0.052 7 | 0.194 1 | 0.549 6 | 0.202 9 | 0.000 0 | 0.000 7 | 0.000 0 |
| t4 | 0.044 9 | 0.156 0 | 0.635 8 | 0.161 8 | 0.000 0 | 0.000 5 | 0.000 0 |
| t5 | 0.044 6 | 0.113 4 | 0.719 0 | 0.122 0 | 0.000 0 | 0.000 1 | 0.000 0 |
| t6 | 0.000 0 | 0.104 5 | 0.786 0 | 0.094 5 | 0.000 0 | 0.000 0 | 0.000 0 |
| t7 | 0.000 0 | 0.097 9 | 0.823 0 | 0.079 0 | 0.000 0 | 0.000 0 | 0.000 0 |
| t8 | 0.031 7 | 0.077 8 | 0.817 3 | 0.073 0 | 0.000 0 | 0.000 2 | 0.000 0 |
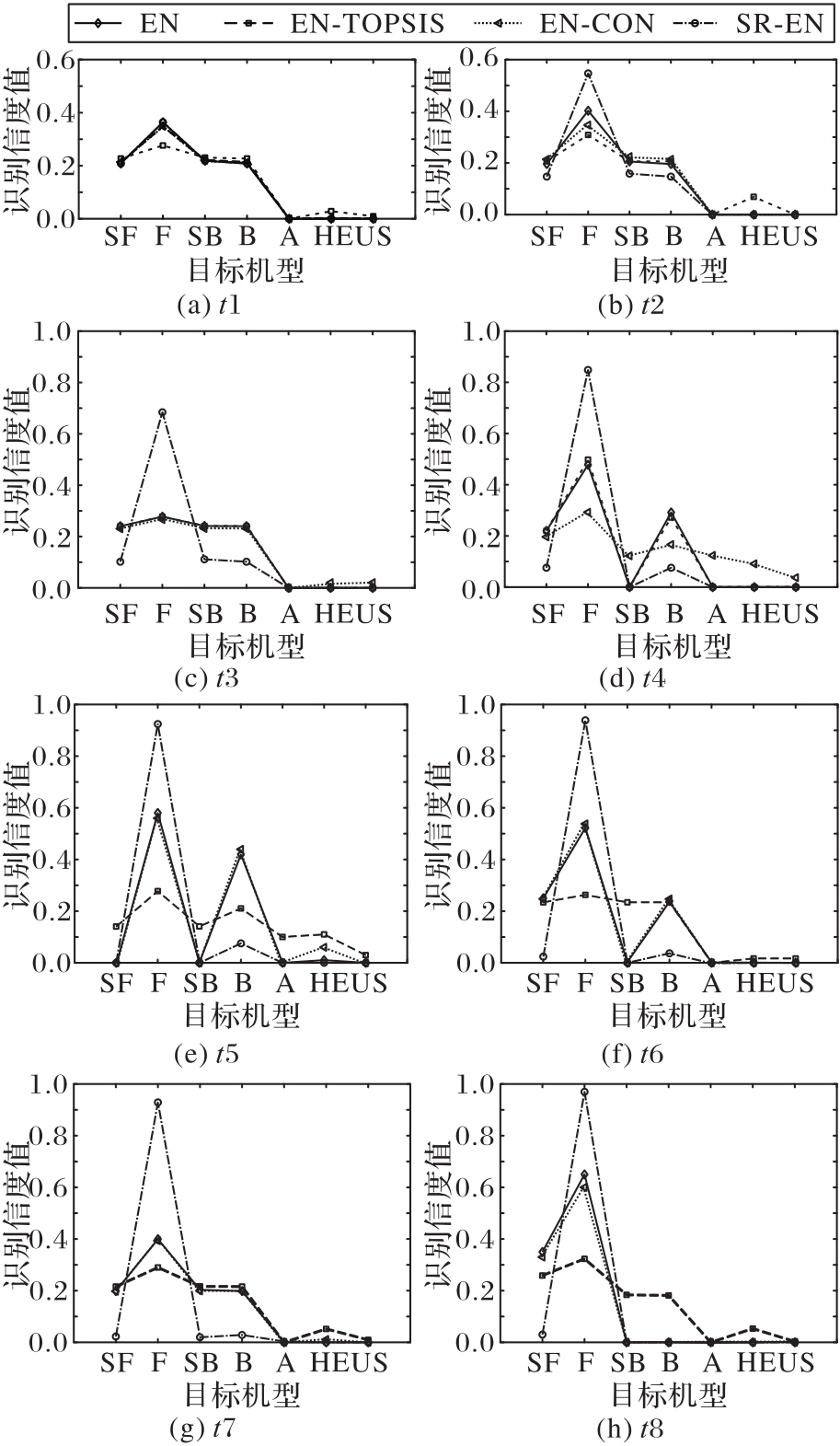
Fig. 6 Comparison of identification results of four methods for target 1

Fig. 7 Comparison of identification results of four methods for target 2
| 时刻 | |||||
|---|---|---|---|---|---|
| 0.0 | 0.3 | 0.5 | 0.8 | 1.0 | |
| t1 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 |
| t2 | 0.392 5 | 0.443 2 | 0.466 4 | 0.491 5 | 0.504 2 |
| t3 | 0.355 6 | 0.466 2 | 0.549 6 | 0.657 8 | 0.712 4 |
| t4 | 0.353 3 | 0.490 0 | 0.635 8 | 0.815 7 | 0.884 8 |
| t5 | 0.351 9 | 0.507 0 | 0.719 0 | 0.936 3 | 0.982 5 |
| t6 | 0.395 2 | 0.542 9 | 0.786 0 | 0.969 4 | 0.987 7 |
| t7 | 0.368 0 | 0.524 2 | 0.823 0 | 0.991 4 | 1.000 0 |
| t8 | 0.284 8 | 0.455 5 | 0.817 3 | 0.992 1 | 1.000 0 |
Tab. 10 Comparison of weight ω sensitivity analysis experimental results (SB type probability)
| 时刻 | |||||
|---|---|---|---|---|---|
| 0.0 | 0.3 | 0.5 | 0.8 | 1.0 | |
| t1 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 | 0.357 3 |
| t2 | 0.392 5 | 0.443 2 | 0.466 4 | 0.491 5 | 0.504 2 |
| t3 | 0.355 6 | 0.466 2 | 0.549 6 | 0.657 8 | 0.712 4 |
| t4 | 0.353 3 | 0.490 0 | 0.635 8 | 0.815 7 | 0.884 8 |
| t5 | 0.351 9 | 0.507 0 | 0.719 0 | 0.936 3 | 0.982 5 |
| t6 | 0.395 2 | 0.542 9 | 0.786 0 | 0.969 4 | 0.987 7 |
| t7 | 0.368 0 | 0.524 2 | 0.823 0 | 0.991 4 | 1.000 0 |
| t8 | 0.284 8 | 0.455 5 | 0.817 3 | 0.992 1 | 1.000 0 |
| 推理方法 | 平均运行时间 | 推理方法 | 平均运行时间 |
|---|---|---|---|
| EN | 0.113 6 | EN-CON | 0.139 5 |
| EN-TOPSIS | 0.116 5 | SR-EN | 0.128 7 |
Tab. 11 Average running time comparison of four methods
| 推理方法 | 平均运行时间 | 推理方法 | 平均运行时间 |
|---|---|---|---|
| EN | 0.113 6 | EN-CON | 0.139 5 |
| EN-TOPSIS | 0.116 5 | SR-EN | 0.128 7 |
| 1 | LIN Z, XIE J Y. Research on improved evidence theory based on multi-sensor information fusion[J]. Scientific Reports, 2021, 11: No.9267. 10.1038/s41598-021-88814-3 |
| 2 | ZHAO G Z, CHEN A G, LU G X, et al. Data fusion algorithm based on fuzzy sets and D-S theory of evidence[J]. Tsinghua Science and Technology, 2020, 25(1): 12-19. 10.26599/tst.2018.9010138 |
| 3 | 吴强,姜礼平,季傲. 基于模糊集和D-S证据理论的空中作战目标识别[J]. 指挥控制与仿真, 2015, 37(4): 54-58. |
| WU Q, JIANG L P, JI A. Aircraft target identification based on fuzzy sets and D-S evidence theory in air operation[J]. Command Control and Simulation, 2015, 37(4): 54-58. | |
| 4 | 赵静,关欣,刘海桥. 冲突证据决策新方法及应用[J]. 北京航空航天大学学报, 2019, 45(9): 1838-1847. |
| ZHAO J, GUAN X, LIU H Q. A new conflict evidence decision method and its application[J]. Journal of Beijing University of Aeronautics and Astronautics, 2019, 45(9): 1838-1847. | |
| 5 | 高晓阳,王刚. 基于改进时域证据融合的目标识别[J]. 系统工程与电子技术, 2018, 40(12): 2629-2635. 10.3969/j.issn.1001-506X.2018.12.02 |
| GAO X Y, WANG G. Target identification based on improved combination of temporal evidence sources[J]. Systems Engineering and Electronics, 2018, 40(12): 2629-2635. 10.3969/j.issn.1001-506X.2018.12.02 | |
| 6 | 尹东亮,黄晓颖,吴艳杰,等. 基于云模型和改进D-S证据理论的目标识别决策方法研究[J]. 航空学报, 2021, 42(12): No.324768. |
| YIN D L, HUANG X Y, WU Y J, et al. Target recognition decision method based on cloud model and improved D-S evidence theory[J]. Acta Aeronautica et Astronautica Sinica, 2021, 42(12): No.324768. | |
| 7 | MI J H, LU N, LI Y F, et al. An evidential network-based hierarchical method for system reliability analysis with common cause failures and mixed uncertainties[J]. Reliability Engineering and System Safety, 2022, 220: No.108295. 10.1016/j.ress.2021.108295 |
| 8 | 王昱,章卫国,傅莉,等. 基于改进证据网络的空战动态态势估计方法[J]. 航空学报, 2015, 36(12): 3896-3909. |
| WANG Y, ZHANG W G, FU L, et al. Dynamic situation assessment method of aerial warfare based on improved evidence network[J]. Acta Aeronautica et Astronautica Sinica, 2015, 36(12): 3896-3909. | |
| 9 | DUAN R X, LIN Y N, HU L F. Reliability evaluation for complex systems based on interval-valued triangular fuzzy weighted mean and evidence network[J]. Journal of Advanced Mechanical Design, Systems, and Manufacturing, 2018, 12(4): No.JAMDSM0087. 10.1299/jamdsm.2018jamdsm0087 |
| 10 | BOUGOFA M, BOUAFIA A, BELLAOUAR A. Availability assessment of complex systems under parameter uncertainty using dynamic evidential networks[J]. International Journal of Performability Engineering, 2020, 16(4): 510-519. 10.23940/ijpe.20.04.p2.510519 |
| 11 | ZUO L, XIAHOU T F, LIU Y. Reliability assessment of systems subject to interval-valued probabilistic common cause failure by evidential networks[J]. Journal of Intelligent and Fuzzy Systems, 2019, 36(4): 3711-3723. 10.3233/jifs-18290 |
| 12 | DU J H, HU M H, ZHANG W N. Missing data problem in the monitoring system: a review[J]. IEEE Sensors Journal, 2020: 20(23): 13984-13998. 10.1109/jsen.2020.3009265 |
| 13 | HUANG G L. Missing data filling method based on linear interpolation and lightGBM[J]. Journal of Physics: Conference Series, 2021, 1754: No.012187. 10.1088/1742-6596/1754/1/012187 |
| 14 | 陈海洋,刘喜庆,环晓敏. 一步预测的SVDDBN缺失数据插补算法[J]. 计算机工程与应用, 2020, 56(7): 81-87. |
| CHEN H Y, LIU X Q, HUAN X M. One-step prediction SVDDBN missing data interpolation algorithm[J]. Computer Engineering and Applications, 2020, 56(7): 81-87. | |
| 15 | JOHNY V, PHILIP M, AUGUSTINE S. Methods to handle incomplete data[J]. MAMC Journal of Medical Sciences, 2020, 6(3): 194-198. 10.4103/mamcjms.mamcjms_54_20 |
| 16 | RAHMAN M G, ISLAM M Z. Missing value imputation using a fuzzy clustering-based EM approach[J]. Knowledge and Information Systems, 2016, 46(2): 389-422. 10.1007/s10115-015-0822-y |
| 17 | QU S Q, SALLAK M, SCHÖN W, et al. A valuation-based system approach for risk assessment of belief rule-based expert systems[J]. Information Sciences, 2018, 466: 323-336. 10.1016/j.ins.2018.04.039 |
| 18 | 梁复台,周焰,陈新,等. 基于TOPSIS-BORDA连续时间片的空中目标识别算法[J]. 兵器装备工程学报, 2021, 42(11): 169-173. |
| LIANG F T, ZHOU Y, CHEN X, et al. Aerial target recognition algorithm based on TOPSIS-BORDA continuous time slice[J]. Journal of Ordnance Equipment Engineering, 2021, 42(11): 169-173. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||