


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (12): 3840-3847.DOI: 10.11772/j.issn.1001-9081.2022121847
Special Issue: 先进计算
• Advanced computing • Previous Articles Next Articles
Lin HUANG1, Qiang FU1,2( ), Nan TONG2
), Nan TONG2
Received:2022-12-13
Revised:2023-03-03
Accepted:2023-03-06
Online:2023-03-27
Published:2023-12-10
Contact:
Qiang FU
About author:HUANG Lin, born in 1997, M.S. candidate. His research interests include swarm intelligence algorithm, machine learning.Supported by:
黄霖1, 符强1,2(), 童楠2
通讯作者:
符强
作者简介:黄霖(1997—),男,江西赣州人,硕士研究生,主要研究方向:群智能算法、机器学习基金资助:CLC Number:
Lin HUANG, Qiang FU, Nan TONG. Solving robot path planning problem by adaptively adjusted Harris hawk optimization algorithm[J]. Journal of Computer Applications, 2023, 43(12): 3840-3847.
黄霖, 符强, 童楠. 基于自适应调整哈里斯鹰优化算法求解机器人路径规划问题[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3840-3847.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022121847
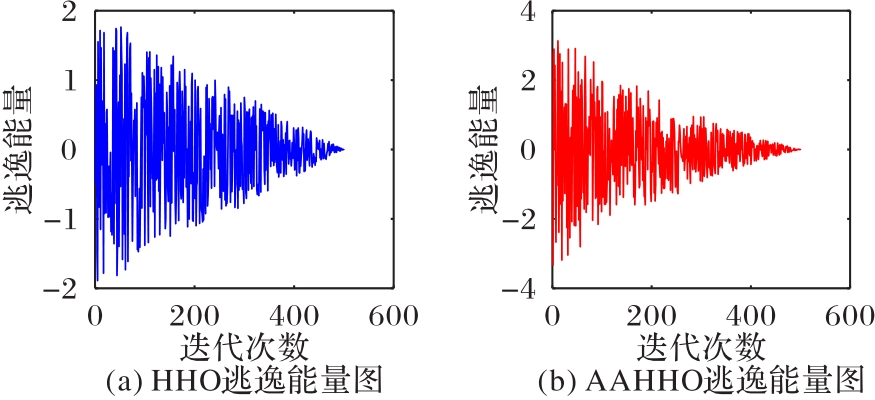
Fig. 1 Escape energy contrast
| 函数类型 | 函数公式 | 维度 | 取值范围 | 最优值 |
|---|---|---|---|---|
| 单峰函数 | 30 | [-100,100] | 0 | |
| 30 | [-10,10] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-30,30] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-128,128] | 0 | ||
| 多峰函数 | 30 | [-500,500] | -418.982 9×n | |
| 30 | [-32,32] | 0 | ||
| 30 | [-600,600] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 2 | [-65,65] | 1 | ||
| 4 | [-5,5] | 0.000 3 | ||
| 2 | [-5,5] | -1.031 6 | ||
| 4 | [0,10] | -10.536 3 |
Tab. 1 Test functions
| 函数类型 | 函数公式 | 维度 | 取值范围 | 最优值 |
|---|---|---|---|---|
| 单峰函数 | 30 | [-100,100] | 0 | |
| 30 | [-10,10] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-30,30] | 0 | ||
| 30 | [-100,100] | 0 | ||
| 30 | [-128,128] | 0 | ||
| 多峰函数 | 30 | [-500,500] | -418.982 9×n | |
| 30 | [-32,32] | 0 | ||
| 30 | [-600,600] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 30 | [-50,50] | 0 | ||
| 2 | [-65,65] | 1 | ||
| 4 | [-5,5] | 0.000 3 | ||
| 2 | [-5,5] | -1.031 6 | ||
| 4 | [0,10] | -10.536 3 |
| 测试函数 | 指标 | HSCA | TGWO | HHO | IHHO | CHHO | AAHHO |
|---|---|---|---|---|---|---|---|
| AVG | 8.84E-07 | 2.56E-299 | 2.44E-95 | 4.76E-99 | 9.52E-128 | 0 | |
| STD | 4.60E-06 | 9.89E-299 | 9.05E-95 | 2.16E-98 | 4.59E-127 | 0 | |
| AVG | 1.78E-06 | 1.68E-164 | 6.77E-49 | 9.75E-48 | 8.32E-68 | 0 | |
| STD | 4.76E-06 | 2.69E-164 | 1.41E-49 | 2.05E-48 | 1.75E-68 | 0 | |
| AVG | 4.13E-07 | 4.16E-150 | 3.67E-49 | 6.10E-48 | 1.70E-63 | 3.30E-175 | |
| STD | 1.06E-06 | 2.26E-150 | 1.17E-49 | 2.14E-47 | 9.15E-63 | 4.31E-184 | |
| AVG | 8.75E+00 | 2.83E+01 | 1.02E-02 | 1.35E+00 | 1.22E-02 | 8.01E-04 | |
| STD | 9.27E-02 | 3.34E-01 | 1.24E-02 | 7.42E-01 | 1.77E-02 | 1.27E-03 | |
| AVG | 6.07E-04 | 5.40E+00 | 3.12E-04 | 1.04E-02 | 3.09E-04 | 2.84E-05 | |
| STD | 2.95E-04 | 1.87E-01 | 3.14E-04 | 5.81E-03 | 2.27E-04 | 2.92E-05 | |
| AVG | 2.64E-04 | 8.98E-05 | 1.22E-04 | 3.86E-04 | 9.64E-05 | 4.75E-05 | |
| STD | 6.32E-04 | 8.57E-05 | 1.41E-04 | 4.70E-04 | 7.15E-05 | 3.33E-05 | |
| AVG | -2.54E+03 | -2.36E+03 | -1.24E+04 | -1.12E+04 | -8.57E+03 | -1.26E+04 | |
| STD | 4.23E+02 | 2.96E+02 | 8.52E+02 | 1.75E+03 | 2.14E+03 | 1.41E-02 | |
| AVG | 1.07E-05 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | |
| STD | 4.45E-05 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 4.70E-02 | 0 | 0 | 0 | 0 | 0 | |
| STD | 1.57E-01 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 1.31E-04 | 7.47E-01 | 1.14E-05 | 4.98E-04 | 7.03E-05 | 2.11E-06 | |
| STD | 1.55E-04 | 5.74E-02 | 2.10E-05 | 3.60E-04 | 8.73E-05 | 2.41E-06 | |
| AVG | 1.23E-02 | 2.65E+00 | 1.34E-04 | 7.20E-03 | 6.24E-04 | 2.14E-05 | |
| STD | 6.33E-02 | 5.79E-02 | 1.73E-04 | 7.98E-03 | 1.58E-03 | 2.11E-05 | |
| AVG | 1.88E+00 | 3.85E+00 | 1.22E+00 | 2.74E+00 | 2.43E+00 | 9.98E-01 | |
| STD | 1.05E+00 | 2.59E+00 | 4.38E-01 | 3.42E+00 | 1.65E+00 | 2.70E-04 | |
| AVG | 4.56E-04 | 5.54E-04 | 3.57E-04 | 3.97E-04 | 4.99E-04 | 3.38E-04 | |
| STD | 3.92E-04 | 1.29E-04 | 4.94E-05 | 1.23E-04 | 2.95E-04 | 3.70E-05 | |
| AVG | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | |
| STD | 0 | 0 | 0 | 0 | 0 | 0 | |
| STD | 0 | 4.97E-04 | 0 | 0 | 0 | 0 | |
| AVG | -7.17E+00 | -3.88E+00 | -5.21E+00 | -7.74E+00 | -5.30E+00 | -1.05E+01 | |
| STD | 2.49E+00 | 6.11E-01 | 1.13E+00 | 2.75E+00 | 1.96E+00 | 1.39E-02 |
Tab. 2 Comparison of optimization results of six algorithms under fixed number of iterations
| 测试函数 | 指标 | HSCA | TGWO | HHO | IHHO | CHHO | AAHHO |
|---|---|---|---|---|---|---|---|
| AVG | 8.84E-07 | 2.56E-299 | 2.44E-95 | 4.76E-99 | 9.52E-128 | 0 | |
| STD | 4.60E-06 | 9.89E-299 | 9.05E-95 | 2.16E-98 | 4.59E-127 | 0 | |
| AVG | 1.78E-06 | 1.68E-164 | 6.77E-49 | 9.75E-48 | 8.32E-68 | 0 | |
| STD | 4.76E-06 | 2.69E-164 | 1.41E-49 | 2.05E-48 | 1.75E-68 | 0 | |
| AVG | 4.13E-07 | 4.16E-150 | 3.67E-49 | 6.10E-48 | 1.70E-63 | 3.30E-175 | |
| STD | 1.06E-06 | 2.26E-150 | 1.17E-49 | 2.14E-47 | 9.15E-63 | 4.31E-184 | |
| AVG | 8.75E+00 | 2.83E+01 | 1.02E-02 | 1.35E+00 | 1.22E-02 | 8.01E-04 | |
| STD | 9.27E-02 | 3.34E-01 | 1.24E-02 | 7.42E-01 | 1.77E-02 | 1.27E-03 | |
| AVG | 6.07E-04 | 5.40E+00 | 3.12E-04 | 1.04E-02 | 3.09E-04 | 2.84E-05 | |
| STD | 2.95E-04 | 1.87E-01 | 3.14E-04 | 5.81E-03 | 2.27E-04 | 2.92E-05 | |
| AVG | 2.64E-04 | 8.98E-05 | 1.22E-04 | 3.86E-04 | 9.64E-05 | 4.75E-05 | |
| STD | 6.32E-04 | 8.57E-05 | 1.41E-04 | 4.70E-04 | 7.15E-05 | 3.33E-05 | |
| AVG | -2.54E+03 | -2.36E+03 | -1.24E+04 | -1.12E+04 | -8.57E+03 | -1.26E+04 | |
| STD | 4.23E+02 | 2.96E+02 | 8.52E+02 | 1.75E+03 | 2.14E+03 | 1.41E-02 | |
| AVG | 1.07E-05 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | 8.88E-16 | |
| STD | 4.45E-05 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 4.70E-02 | 0 | 0 | 0 | 0 | 0 | |
| STD | 1.57E-01 | 0 | 0 | 0 | 0 | 0 | |
| AVG | 1.31E-04 | 7.47E-01 | 1.14E-05 | 4.98E-04 | 7.03E-05 | 2.11E-06 | |
| STD | 1.55E-04 | 5.74E-02 | 2.10E-05 | 3.60E-04 | 8.73E-05 | 2.41E-06 | |
| AVG | 1.23E-02 | 2.65E+00 | 1.34E-04 | 7.20E-03 | 6.24E-04 | 2.14E-05 | |
| STD | 6.33E-02 | 5.79E-02 | 1.73E-04 | 7.98E-03 | 1.58E-03 | 2.11E-05 | |
| AVG | 1.88E+00 | 3.85E+00 | 1.22E+00 | 2.74E+00 | 2.43E+00 | 9.98E-01 | |
| STD | 1.05E+00 | 2.59E+00 | 4.38E-01 | 3.42E+00 | 1.65E+00 | 2.70E-04 | |
| AVG | 4.56E-04 | 5.54E-04 | 3.57E-04 | 3.97E-04 | 4.99E-04 | 3.38E-04 | |
| STD | 3.92E-04 | 1.29E-04 | 4.94E-05 | 1.23E-04 | 2.95E-04 | 3.70E-05 | |
| AVG | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | -1.0316 | |
| STD | 0 | 0 | 0 | 0 | 0 | 0 | |
| STD | 0 | 4.97E-04 | 0 | 0 | 0 | 0 | |
| AVG | -7.17E+00 | -3.88E+00 | -5.21E+00 | -7.74E+00 | -5.30E+00 | -1.05E+01 | |
| STD | 2.49E+00 | 6.11E-01 | 1.13E+00 | 2.75E+00 | 1.96E+00 | 1.39E-02 |

Fig. 2 Convergence curves of 15 benchmark functions

Fig.3 Comparison of path plannings and convergence curves for different scenes
| 场景 | 算法 | 最优值 | 最差值 | 平均值 | 方差 |
|---|---|---|---|---|---|
场景 一 | HSCA | 5.727 2 | 7.281 9 | 6.170 7 | 0.395 6 |
| TGWO | 5.704 6 | 5.916 8 | 5.809 4 | 0.005 7 | |
| HHO | 5.671 6 | 6.531 9 | 5.849 0 | 0.101 5 | |
| IHHO | 5.669 6 | 6.428 3 | 5.817 7 | 0.069 1 | |
| CHHO | 5.669 6 | 6.368 8 | 5.760 0 | 0.045 1 | |
| AAHHO | 5.671 0 | 5.678 2 | 5.673 2 | 5.27E-06 | |
场景 二 | HSCA | 9.142 1 | 10.939 9 | 9.869 7 | 0.783 5 |
| TGWO | 8.868 9 | 11.152 3 | 9.560 8 | 1.139 4 | |
| HHO | 8.721 0 | 10.933 0 | 9.869 6 | 1.501 6 | |
| IHHO | 8.727 5 | 9.273 6 | 8.967 0 | 0.062 6 | |
| CHHO | 8.630 2 | 10.779 3 | 9.429 8 | 0.884 0 | |
| AAHHO | 8.639 7 | 8.872 9 | 8.756 5 | 0.010 5 |
Tab.3 Path comparison of six algorithms in different scenarios
| 场景 | 算法 | 最优值 | 最差值 | 平均值 | 方差 |
|---|---|---|---|---|---|
场景 一 | HSCA | 5.727 2 | 7.281 9 | 6.170 7 | 0.395 6 |
| TGWO | 5.704 6 | 5.916 8 | 5.809 4 | 0.005 7 | |
| HHO | 5.671 6 | 6.531 9 | 5.849 0 | 0.101 5 | |
| IHHO | 5.669 6 | 6.428 3 | 5.817 7 | 0.069 1 | |
| CHHO | 5.669 6 | 6.368 8 | 5.760 0 | 0.045 1 | |
| AAHHO | 5.671 0 | 5.678 2 | 5.673 2 | 5.27E-06 | |
场景 二 | HSCA | 9.142 1 | 10.939 9 | 9.869 7 | 0.783 5 |
| TGWO | 8.868 9 | 11.152 3 | 9.560 8 | 1.139 4 | |
| HHO | 8.721 0 | 10.933 0 | 9.869 6 | 1.501 6 | |
| IHHO | 8.727 5 | 9.273 6 | 8.967 0 | 0.062 6 | |
| CHHO | 8.630 2 | 10.779 3 | 9.429 8 | 0.884 0 | |
| AAHHO | 8.639 7 | 8.872 9 | 8.756 5 | 0.010 5 |
| 1 | DENG X, LI R, ZHAO L, et al. Multi-obstacle path planning and optimization for mobile robot[J]. Expert Systems with Applications, 2021, 183: 115445. 10.1016/j.eswa.2021.115445 |
| 2 | 徐小强,王明勇,冒燕.基于改进人工势场法的移动机器人路径规划 [J].计算机应用,2020,40(12):3508-3512. 10.11772/j.issn.1001-9081.2020050640 |
| XU X Q, WANG M Y, MAO Y.Path planning of mobile robot based on improved artificial potential field method [J]. Journal of Computer Applications, 2020,40 (12): 3508-3512. 10.11772/j.issn.1001-9081.2020050640 | |
| 3 | HUANG H, LI Y, BAI Q. An improved A star algorithm for wheeled robots path planning with jump points search and pruning method [J]. Complex Engineering Systems, 2022, 2(3): 11. 10.20517/ces.2022.12 |
| 4 | 李伟,金世俊.基于人工势场法和启发式采样的最优路径收敛方法[J].计算机应用,2021,41(10):2912-2918. 10.11772/j.issn.1001-9081.2020122021 |
| LI W, JIN S J. Optimal path convergence method based on artificial potential field method and informed sampling [J]. Journal of Computer Applications, 2021,41(10): 2912-2918. 10.11772/j.issn.1001-9081.2020122021 | |
| 5 | 刘志强,何丽,袁亮,等.采用改进灰狼算法的移动机器人路径规划[J].西安交通大学学报,2022,56(10):49-60. 10.7652/xjtuxb202210005 |
| LIU Z Q, HE L, YUAN L, et al. Path planning of mobile robot based on TGWO algorithm [J]. Journal of Xi’an Jiaotong University, 2022,56(10): 49-60. 10.7652/xjtuxb202210005 | |
| 6 | WANG J, LIU J, CHEN W, et al. Robot path planning via neural-network-driven prediction[J]. IEEE Transactions on Artificial Intelligence, 2021, 3(3): 451-460. 10.1109/tai.2021.3119890 |
| 7 | WU P, CAO Y, HE Y, et al. Vision-based robot path planning with deep learning[C]// Proceedings of the 11th International Conference on Computer Vision Systems. Cham: Springer, 2017: 101-111. 10.1007/978-3-319-68345-4_9 |
| 8 | ABDI A, ADHIKARI D, PARK J H. A novel hybrid path planning method based on Q-learning and neural network for robot arm [J]. Applied Sciences, 2021, 11(15): 6770. 10.3390/app11156770 |
| 9 | 马莹莹,杜暖男.基于改进正余弦算法的机器人路径规划[J].重庆交通大学学报(自然科学版),2021,40(9):17-23. 10.3969/j.issn.1674-0696.2021.09.03 |
| MA Y Y, DU N N. Robot path planning based on the improved sine cosine algorithm [J]. Journal of Chongqing Jiaotong University (Natural Sciences), 2021,40 (9): 17-23. 10.3969/j.issn.1674-0696.2021.09.03 | |
| 10 | 刘景森,吉宏远,李煜.基于改进蝙蝠算法和三次样条插值的机器人路径规划[J].自动化学报,2021,47(7):1710-1719. |
| LIU J S, JI H Y, LI Y. Robotic path planning based on improved bat algorithm and cubic spline interpolation [J]. Acta Automatica Sinica, 2021,47 (7): 1710-1719. | |
| 11 | HEIDARI A A, MIRJALILI S, FARIS H, et al. Harris hawks optimization: algorithm and applications [J]. Future Generation Computer Systems, 2019, 97: 849-872. 10.1016/j.future.2019.02.028 |
| 12 | LIU C. An improved Harris hawks optimizer for job-shop scheduling problem[J]. The Journal of Supercomputing, 2021, 77: 14090-14129. 10.1007/s11227-021-03834-0 |
| 13 | JIA H, LANG C, OLIVA D, et al. Dynamic Harris hawks optimization with mutation mechanism for satellite image segmentation [J]. Remote Sensing, 2019, 11(12): 1421. 10.3390/rs11121421 |
| 14 | GOLILARZ N A, MIRMOZAFFARI M, GASHTEROODKHANI T A, et al. Optimized wavelet-based satellite image de-noising with multi-population differential evolution-assisted Harris hawks optimization algorithm[J]. IEEE Access, 2020, 8: 133076-133085. 10.1109/access.2020.3010127 |
| 15 | JIA H, PENG X, KANG L, et al. Pulse coupled neural network based on Harris hawks optimization algorithm for image segmentation [J]. Multimedia Tools and Applications, 2020, 79: 28369-28392. 10.1007/s11042-020-09228-3 |
| 16 | BANDYOPADHYAY R, KUNDU R, OLIVA D, et al. Segmentation of brain MRI using an altruistic Harris hawks’ optimization algorithm[J]. Knowledge-Based Systems, 2021, 232: 107468. 10.1016/j.knosys.2021.107468 |
| 17 | CAMPBELL M O N. The Great Eagles: Their Evolution, Ecology and Conservation [M]. Boca Raton: CRC Press, 2022:347-363. 10.1201/b21921-8 |
| 18 | TURABIEH H, AZWARI S A, ROKAYA M, et al. Enhanced Harris hawks optimization as a feature selection for the prediction of student performance [J]. Computing, 2021, 103: 1417-1438. 10.1007/s00607-020-00894-7 |
| 19 | ABDEL-BASSET M, DING W, EL-SHAHAT D. A hybrid Harris hawks optimization algorithm with simulated annealing for feature selection [J]. Artificial Intelligence Review, 2021, 54: 593-637. 10.1007/s10462-020-09860-3 |
| 20 | SIHWAIL R, OMAR K, ARIFFIN K A Z, et al. Improved Harris hawks optimization using elite opposition-based learning and novel search mechanism for feature selection [J]. IEEE Access, 2020, 8: 121127-121145. 10.1109/access.2020.3006473 |
| 21 | AL-SAFI H, MUNILLA J, RAHEBI J. Patient privacy in smart cities by blockchain technology and feature selection with Harris Hawks Optimization (HHO) algorithm and machine learning [J]. Multimedia Tools and Applications, 2022, 81: 8719-8743. 10.1007/s11042-022-12164-z |
| 22 | ZHANG Y, LIU R, WANG X, et al. Boosted binary Harris hawks optimizer and feature selection [J]. Engineering with Computers, 2021, 37: 3741-3770. 10.1007/s00366-020-01028-5 |
| 23 | CHAKRABORTY A, KAR A K. Swarm intelligence: a review of algorithms [M]// Nature-Inspired Computing and Optimization 10. Cham: Springer, 2017: 475-494. 10.1007/978-3-319-50920-4_19 |
| 24 | BARTHELEMY P, BERTOLOTTI J, WIERSMA D S. A Lévy flight for light [J]. Nature, 2008, 453: 495-498. 10.1038/nature06948 |
| 25 | GEZICI H, LIVATYALI H. Chaotic Harris hawks optimization algorithm [J]. Journal of Computational Design and Engineering, 2022, 9(1): 216-245. 10.1093/jcde/qwab082 |
| 26 | 刘景森,袁蒙蒙,李煜.基于改进的樽海鞘群算法求解机器人路径规划问题[J].计算机研究与发展,2022,59(6):1297-1314. 10.7544/issn1000-1239.20201016 |
| LIU J S, YUAN M M, LI Y. Robot path planning based on improved salp swarm algorithm [J]. Journal of Computer Research and Development, 2022,59(6): 1297-1314. 10.7544/issn1000-1239.20201016 |
| [1] | Haodong HE, Hao FU, Qiang WANG, Shuai ZHOU, Wei LIU. Multi-robot path following and formation based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(8): 2626-2633. |
| [2] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [3] | Runze TIAN, Yulong ZHOU, Hong ZHU, Gang XUE. Local information based path selection algorithm for service migration [J]. Journal of Computer Applications, 2024, 44(7): 2168-2174. |
| [4] | Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7): 2294-2300. |
| [5] | Jianqiang LI, Zhou HE. Hybrid NSGA-Ⅱ for vehicle routing problem with multi-trip pickup and delivery [J]. Journal of Computer Applications, 2024, 44(4): 1187-1194. |
| [6] | Rui TANG, Shibo YUE, Ruizhi ZHANG, Chuan LIU, Chuanlin PANG. Energy efficiency optimization mechanism for UAV-assisted and non-orthogonal multiple access-enabled data collection system [J]. Journal of Computer Applications, 2024, 44(4): 1209-1218. |
| [7] | Haixin HUANG, Guangwei YU, Shoushan CHENG, Chunming LI. Full coverage path planning of bridge inspection wall-climbing robot based on improved grey wolf optimization [J]. Journal of Computer Applications, 2024, 44(3): 966-971. |
| [8] | Ziyang SONG, Junhuai LI, Huaijun WANG, Xin SU, Lei YU. Path planning algorithm of manipulator based on path imitation and SAC reinforcement learning [J]. Journal of Computer Applications, 2024, 44(2): 439-444. |
| [9] | Yuanchao LI, Chongben TAO, Chen WANG. Gait control method based on maximum entropy deep reinforcement learning for biped robot [J]. Journal of Computer Applications, 2024, 44(2): 445-451. |
| [10] | Jiachen YU, Ye YANG. Irregular object grasping by soft robotic arm based on clipped proximal policy optimization algorithm [J]. Journal of Computer Applications, 2024, 44(11): 3629-3638. |
| [11] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [12] | Enbao QIAO, Xiangyang GAO, Jun CHENG. Self-recovery adaptive Monte Carlo localization algorithm based on support vector machine [J]. Journal of Computer Applications, 2024, 44(10): 3246-3251. |
| [13] | Dongying ZHU, Yong ZHONG, Guanci YANG, Yang LI. Research progress on motion segmentation of visual localization and mapping in dynamic environment [J]. Journal of Computer Applications, 2023, 43(8): 2537-2545. |
| [14] | Yi WANG, Jie XIE, Jia CHENG, Liwei DOU. Review of object pose estimation in RGB images based on deep learning [J]. Journal of Computer Applications, 2023, 43(8): 2546-2555. |
| [15] | Gan LI, Mingdi NIU, Lu CHEN, Jing YANG, Tao YAN, Bin CHEN. Robotic grasp detection in low-light environment by incorporating visual feature enhancement mechanism [J]. Journal of Computer Applications, 2023, 43(8): 2564-2571. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||