| 1 |
KRIZHEVSKY A, SUTSKEVER I, HINTON G E. ImageNet classification with deep convolutional neural networks [J]. Communications of the ACM, 2017, 60(6): 84-90.
|
| 2 |
HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778.
|
| 3 |
AMIRKHANI A, BARSHOOI A H. DeepCar 5.0: vehicle make and model recognition under challenging conditions [J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(1): 541-553.
|
| 4 |
WANG H, PENG J, ZHAO Y, et al. Multi-path deep CNNs for fine-grained car recognition [J]. IEEE Transactions on Vehicular Technology, 2020, 69(10): 10484-10493.
|
| 5 |
LIU C, HUANG L, WEI Z, et al. Subtler mixed attention network on fine-grained image classification [J]. Applied Intelligence, 2021, 51(11): 7903-7916.
|
| 6 |
DING Y, MA Z, WEN S, et al. AP-CNN: weakly supervised attention pyramid convolutional neural network for fine-grained visual classification [J]. IEEE Transactions on Image Processing, 2021, 30: 2826-2836.
|
| 7 |
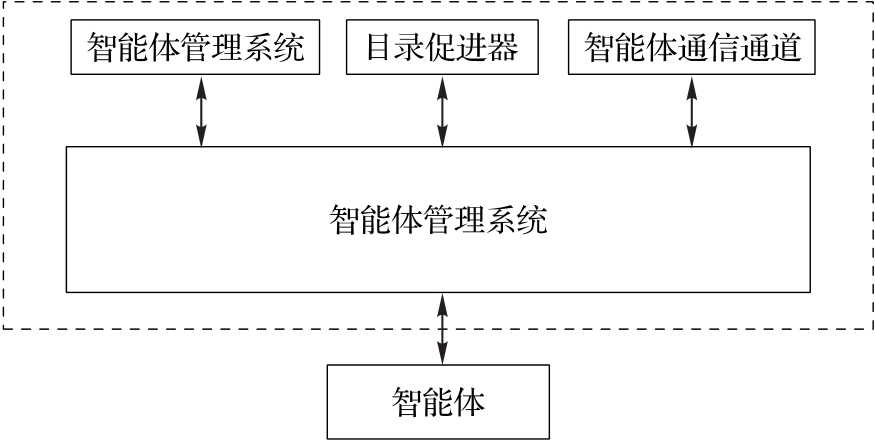
BELLIFEMINE F, POGGI A, RIMASSA G. Developing multi-agent systems with a FIPA-compliant agent framework [J]. Software: Practice and Experience, 2001, 31(2): 103-128.
|
| 8 |
LOWE D G. Distinctive image features from scale-invariant keypoints [J]. International Journal of Computer Vision, 2004, 60(2): 91-110.
|
| 9 |
CORTES C, VAPNIK V. Support-vector networks [J]. Machine Learning, 1995, 20(3): 273-297.
|
| 10 |
HE H, SHAO Z, TAN J. Recognition of car makes and models from a single traffic-camera image [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(6): 3182-3192.
|
| 11 |
ABDELMASEEH M, BADRELDIN I, ABDELKADER M F, et al. Car make and model recognition combining global and local cues [C]// Proceedings of the 21st International Conference on Pattern Recognition. Piscataway: IEEE, 2012: 910-913.
|
| 12 |
HU Q, WANG H, TENG L, et al. Deep CNNs with spatially weighted pooling for fine-grained car recognition [J]. IEEE Transactions on Intelligent Transportation Systems, 2017, 18(11): 3147-3156.
|
| 13 |
LIN T Y, RoyCHOWDHURY A, MAJI S. Bilinear CNN models for fine-grained visual recognition [C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 1449-1457.
|
| 14 |
LIU D, ZHAO L, WANG Y, et al. Learn from each other to classify better: cross-layer mutual attention learning for fine-grained visual classification [J]. Pattern Recognition, 2023, 140: No.109550.
|
| 15 |
REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788.
|
| 16 |
LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot multibox detector [C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9905. Cham: Springer, 2016: 21-37.
|
| 17 |
GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587.
|
| 18 |
SUNKARA R, LUO T. No more strided convolutions or pooling: a new CNN building block for low-resolution images and small objects [C]// Proceedings of the 2022 Joint European Conference on Machine Learning and Knowledge Discovery in Databases, LNCS 13715. Cham: Springer, 2023: 443-459.
|
| 19 |
SORIA X, RIBA E, SAPPA A. Dense extreme inception network: towards a robust CNN model for edge detection [C]// Proceedings of the 2020 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2020: 1912-1921.
|
| 20 |
HUANG X, BELONGIE S. Arbitrary style transfer in real-time with adaptive instance normalization [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 1510-1519.
|
| 21 |
SAGI O, ROKACH L. Ensemble learning: a survey [J]. WIREs: Data Mining and Knowledge Discovery, 2018, 8(4): No.e1249.
|
| 22 |
FORSTER K I, BEDNALL E S. Terminating and exhaustive search in lexical access [J]. Memory and Cognition, 1976, 4(1): 53-61.
|
| 23 |
JOCHER G, CHAURASIA A, STOKEN A, et al. Ultralytics/YOLOv5: v7.0 — YOLOv5 SOTA realtime instance segmentation [EB/OL]. [2024-03-26]. .
|
| 24 |
Ultralytics. Ultralytics [EB/OL]. [2024-03-26]. .
|
| 25 |
RAO Y, CHEN G, LU J, et al. Counterfactual attention learning for fine-grained visual categorization and re-identification [C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 1005-1014.
|
| 26 |
HUTTUNEN H, YANCHESHMEH F S, CHEN K. Car type recognition with deep neural networks [C]// Proceedings of the 2016 IEEE Intelligent Vehicles Symposium. Piscataway: IEEE, 2016: 1115-1120.
|
| 27 |
XIANG Y, FU Y, HUANG H. Global topology constraint network for fine-grained vehicle recognition [J]. IEEE Transactions on Intelligent Transportation Systems, 2020, 21(7): 2918-2929.
|


 ), Yong LIANG1
), Yong LIANG1