


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (3): 950-958.DOI: 10.11772/j.issn.1001-9081.2025040487
• Multimedia computing and computer simulation • Previous Articles Next Articles
Yinshan YU( ), Xu TANG, Mingjian DING, Wenkai HUANG, Jiawen BI, Guochen TAN
), Xu TANG, Mingjian DING, Wenkai HUANG, Jiawen BI, Guochen TAN
Received:2025-04-30
Revised:2025-07-26
Accepted:2025-07-29
Online:2025-08-01
Published:2026-03-10
Contact:
Yinshan YU
About author:TANG Xu, born in 2000, M. S. candidate. Her research interests include object detection, deep learning.Supported by:
于银山(), 唐旭, 丁明鉴, 黄文凯, 毕嘉文, 谭国辰
通讯作者:
于银山
作者简介:唐旭(2000—),女,江苏盐城人,硕士研究生,主要研究方向:目标检测、深度学习基金资助:CLC Number:
Yinshan YU, Xu TANG, Mingjian DING, Wenkai HUANG, Jiawen BI, Guochen TAN. Real-time vehicle detection algorithm based on YOLOv10[J]. Journal of Computer Applications, 2026, 46(3): 950-958.
于银山, 唐旭, 丁明鉴, 黄文凯, 毕嘉文, 谭国辰. 基于YOLOv10的实时车辆检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(3): 950-958.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025040487
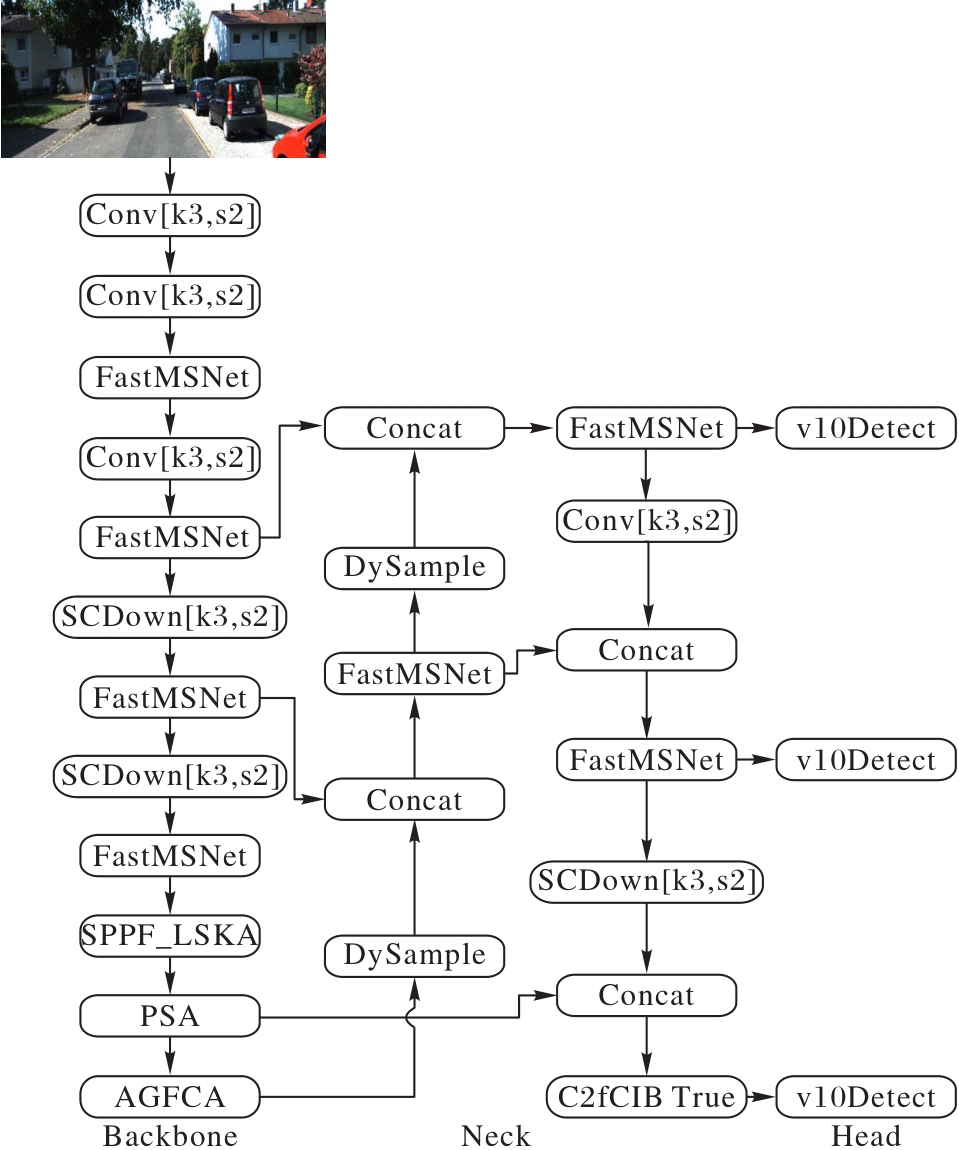
Fig. 1 Structure of YOLOv10-LITE

Fig. 2 YOLOv10-LITE module collaboration structure
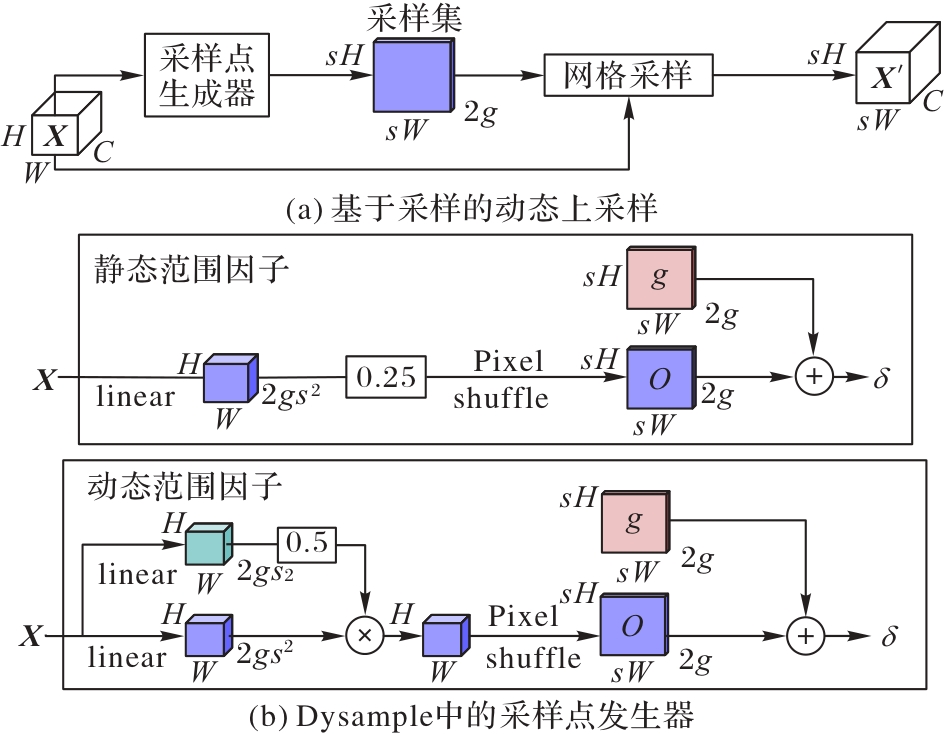
Fig. 3 Structure of DySample module
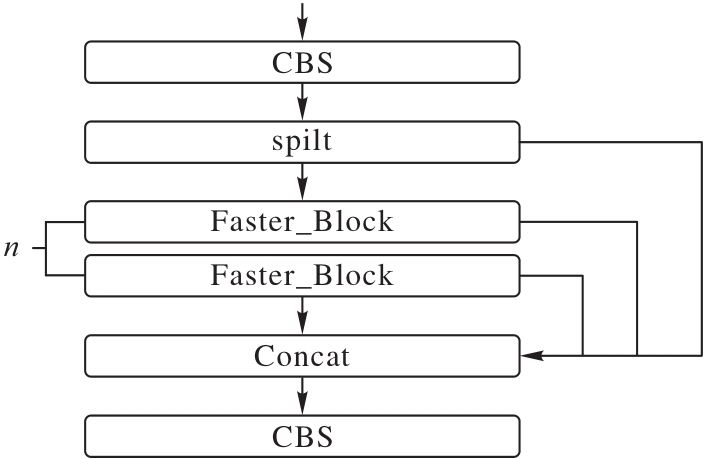
Fig. 4 Structure of C2f-Faster module

Fig. 5 Structure of FastMSNet module
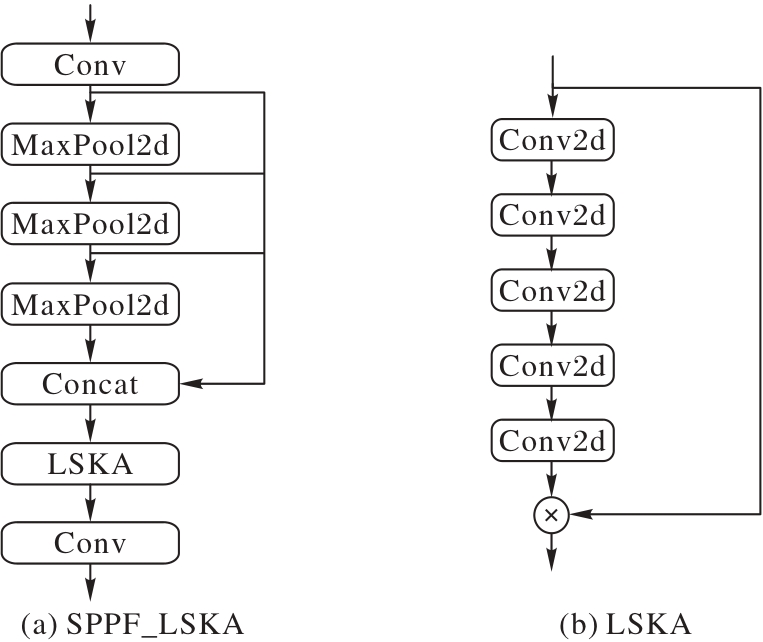
Fig. 6 Structure comparison of SPPF_LSKA and LSKA modules
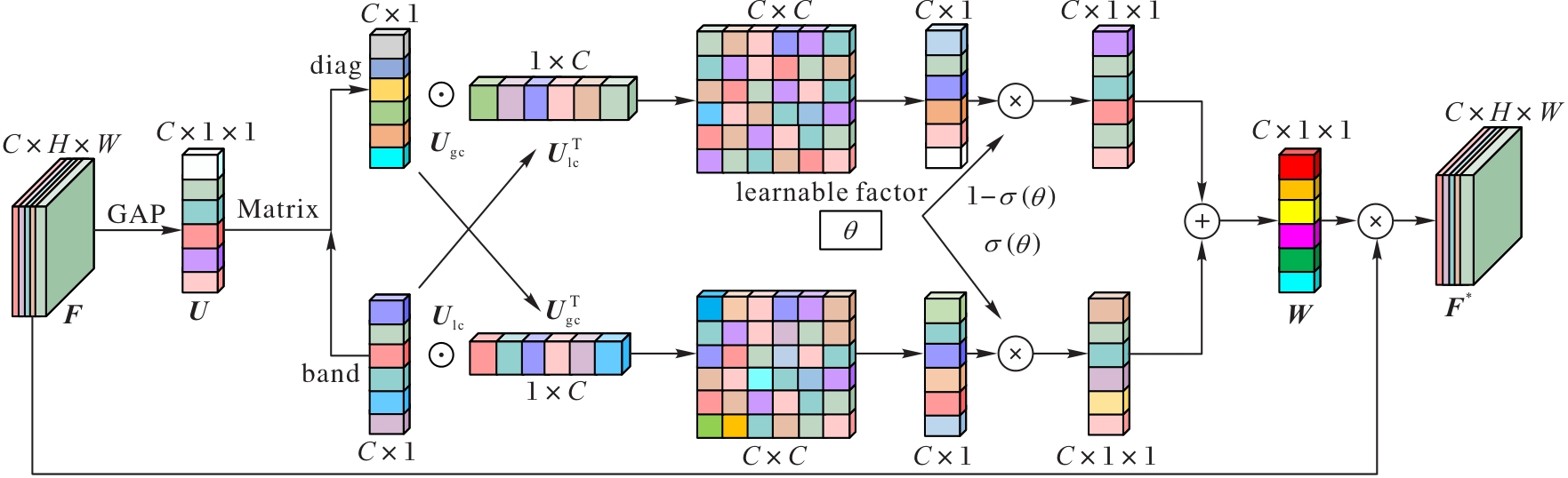
Fig. 7 Structure of AGFCA module
| 项目 | 参数 |
|---|---|
| 实验平台 | AutoDL 算力云 |
| 操作系统 | Ubuntu 18.04 |
| 显卡型号 | NVIDIA GeForce RTX 4090(24 GB) |
| CPU型号 | 16 vCPU Intel Xeon Gold 6430 |
| 内存 | 120 GB |
| Python版本 | Python 3.8 |
| 模型框架 | PyTorch2.0.0+cu118+torchvision 0.15.1 |
Tab. 1 Experimental environment configuration
| 项目 | 参数 |
|---|---|
| 实验平台 | AutoDL 算力云 |
| 操作系统 | Ubuntu 18.04 |
| 显卡型号 | NVIDIA GeForce RTX 4090(24 GB) |
| CPU型号 | 16 vCPU Intel Xeon Gold 6430 |
| 内存 | 120 GB |
| Python版本 | Python 3.8 |
| 模型框架 | PyTorch2.0.0+cu118+torchvision 0.15.1 |
| 名称 | 配置 | 名称 | 配置 |
|---|---|---|---|
| Epochs | 300 | Learn rate | 0.01 |
| Batch_size | 32 | workers | 8 |
| Momentum | 0.937 | Optimizer | SGD |
| Weight decay | 0.000 5 | imgsz | 640 |
Tab. 2 Hyperparameter configuration
| 名称 | 配置 | 名称 | 配置 |
|---|---|---|---|
| Epochs | 300 | Learn rate | 0.01 |
| Batch_size | 32 | workers | 8 |
| Momentum | 0.937 | Optimizer | SGD |
| Weight decay | 0.000 5 | imgsz | 640 |
| 方法 | DySample | FastMSNet | SPPF_LSKA | AGFCA | mAP | 召回率 | 精度 | 浮点计算量/GFLOPs | 参数量/106 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.747 | 0.681 | 0.762 | 6.5 | 2.3 | ||||
| 2 | √ | 0.748 | 0.717 | 0.730 | 6.0 | 2.2 | |||
| 3 | √ | 0.721 | 0.664 | 0.729 | 5.0 | 1.7 | |||
| 4 | √ | 0.753 | 0.707 | 0.738 | 5.3 | 2.5 | |||
| 5 | √ | 0.747 | 0.682 | 0.753 | 6.5 | 2.3 | |||
| 6 | √ | √ | 0.742 | 0.687 | 0.745 | 5.1 | 1.8 | ||
| 7 | √ | √ | √ | 0.752 | 0.702 | 0.724 | 5.3 | 2.1 | |
| 8 | √ | √ | √ | √ | 0.771 | 0.706 | 0.779 | 5.4 | 2.1 |
Tab. 3 Ablation experimental results
| 方法 | DySample | FastMSNet | SPPF_LSKA | AGFCA | mAP | 召回率 | 精度 | 浮点计算量/GFLOPs | 参数量/106 |
|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.747 | 0.681 | 0.762 | 6.5 | 2.3 | ||||
| 2 | √ | 0.748 | 0.717 | 0.730 | 6.0 | 2.2 | |||
| 3 | √ | 0.721 | 0.664 | 0.729 | 5.0 | 1.7 | |||
| 4 | √ | 0.753 | 0.707 | 0.738 | 5.3 | 2.5 | |||
| 5 | √ | 0.747 | 0.682 | 0.753 | 6.5 | 2.3 | |||
| 6 | √ | √ | 0.742 | 0.687 | 0.745 | 5.1 | 1.8 | ||
| 7 | √ | √ | √ | 0.752 | 0.702 | 0.724 | 5.3 | 2.1 | |
| 8 | √ | √ | √ | √ | 0.771 | 0.706 | 0.779 | 5.4 | 2.1 |
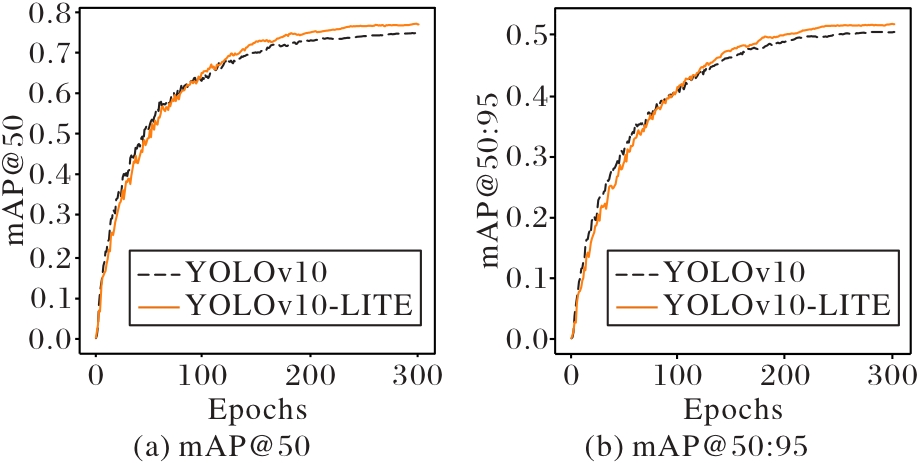
Fig. 8 Comparison of mAP curves before and after model improvement

Fig. 9 Visualization comparison in ablation experiments
| 算法 | 输入尺寸 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| Faster-RCNN | 720×720 | 61.90 | 170.40 | 0.603 | 0.567 | 0.622 |
| SSD | 512×512 | 26.28 | 62.75 | 0.689 | 0.641 | 0.715 |
| RetinaNet[ | 112×112 | 31.20 | 63.20 | 0.595 | 0.554 | 0.612 |
| MobileNet[ | 256×256 | 4.30 | 12.60 | 0.706 | 0.663 | 0.728 |
| Tiny-YOLOv4[ | 768×384 | 5.60 | 20.40 | 0.697 | 0.647 | 0.738 |
| YOLOv5s | 640×640 | 4.50 | 16.20 | 0.729 | 0.684 | 0.745 |
| YOLOv6 | 640×640 | 4.20 | 11.80 | 0.712 | 0.665 | 0.745 |
| YOLOv9 | 640×640 | 2.60 | 10.70 | 0.738 | 0.681 | 0.770 |
| YOLOv8n | 640×640 | 3.20 | 8.40 | 0.741 | 0.678 | 0.765 |
| YOLOv10 | 640×640 | 2.30 | 6.50 | 0.747 | 0.681 | 0.762 |
| YOLOv10X | 640×640 | 3.20 | 10.40 | 0.698 | 0.643 | 0.712 |
| YOLOv10-masks | 640×640 | 2.40 | 6.80 | 0.752 | 0.715 | 0.766 |
| YOLOv10-WD | 640×640 | 4.10 | 11.60 | 0.714 | 0.673 | 0.756 |
| YOLOv10-LITE | 640×640 | 2.10 | 5.40 | 0.771 | 0.706 | 0.779 |
Tab. 4 Detection results of different algorithms
| 算法 | 输入尺寸 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| Faster-RCNN | 720×720 | 61.90 | 170.40 | 0.603 | 0.567 | 0.622 |
| SSD | 512×512 | 26.28 | 62.75 | 0.689 | 0.641 | 0.715 |
| RetinaNet[ | 112×112 | 31.20 | 63.20 | 0.595 | 0.554 | 0.612 |
| MobileNet[ | 256×256 | 4.30 | 12.60 | 0.706 | 0.663 | 0.728 |
| Tiny-YOLOv4[ | 768×384 | 5.60 | 20.40 | 0.697 | 0.647 | 0.738 |
| YOLOv5s | 640×640 | 4.50 | 16.20 | 0.729 | 0.684 | 0.745 |
| YOLOv6 | 640×640 | 4.20 | 11.80 | 0.712 | 0.665 | 0.745 |
| YOLOv9 | 640×640 | 2.60 | 10.70 | 0.738 | 0.681 | 0.770 |
| YOLOv8n | 640×640 | 3.20 | 8.40 | 0.741 | 0.678 | 0.765 |
| YOLOv10 | 640×640 | 2.30 | 6.50 | 0.747 | 0.681 | 0.762 |
| YOLOv10X | 640×640 | 3.20 | 10.40 | 0.698 | 0.643 | 0.712 |
| YOLOv10-masks | 640×640 | 2.40 | 6.80 | 0.752 | 0.715 | 0.766 |
| YOLOv10-WD | 640×640 | 4.10 | 11.60 | 0.714 | 0.673 | 0.756 |
| YOLOv10-LITE | 640×640 | 2.10 | 5.40 | 0.771 | 0.706 | 0.779 |
| 数据集 | 模型 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| KITTI | YOLOv10 | 2.3 | 6.5 | 0.747 | 0.681 | 0.762 |
YOLOv10- LITE | 2.1 | 5.4 | 0.771 | 0.706 | 0.779 | |
BIT Vehicle | YOLOv10 | 2.2 | 6.5 | 0.961 | 0.918 | 0.918 |
YOLOv10- LITE | 2.2 | 5.7 | 0.980 | 0.939 | 0.956 |
Tab. 5 Performance comparison of different models on KITTI and BIT Vehicle datasets
| 数据集 | 模型 | 参数量/106 | 计算量/GFLOPs | mAP | 召回率 | 精度 |
|---|---|---|---|---|---|---|
| KITTI | YOLOv10 | 2.3 | 6.5 | 0.747 | 0.681 | 0.762 |
YOLOv10- LITE | 2.1 | 5.4 | 0.771 | 0.706 | 0.779 | |
BIT Vehicle | YOLOv10 | 2.2 | 6.5 | 0.961 | 0.918 | 0.918 |
YOLOv10- LITE | 2.2 | 5.7 | 0.980 | 0.939 | 0.956 |
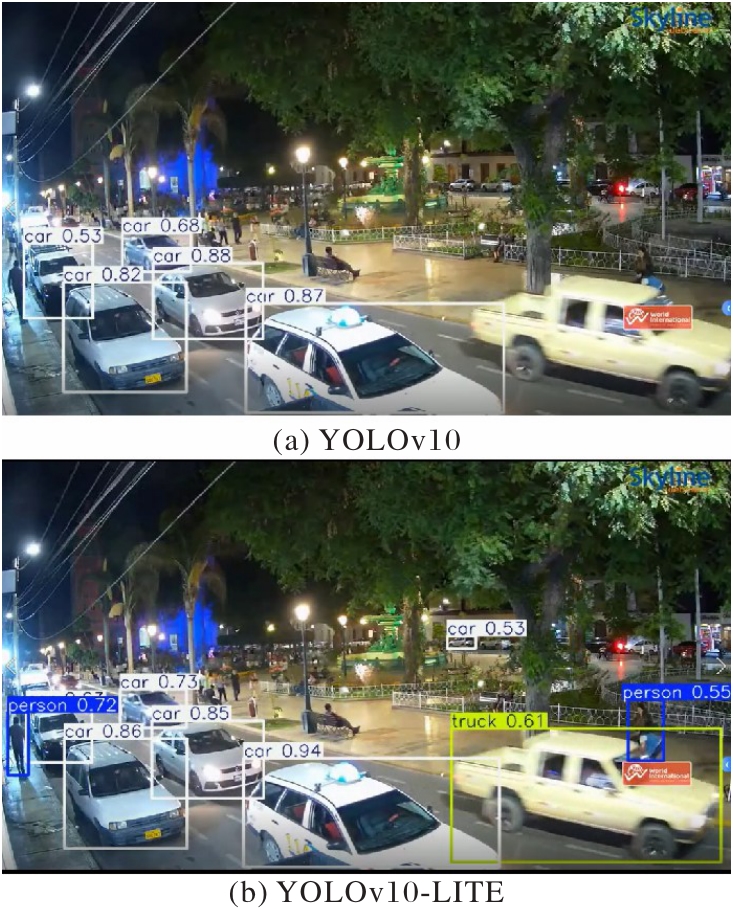
Fig. 10 Comparison of video detection effects
| [1] | DAI X. HybridNet: a fast vehicle detection system for autonomous driving [J]. Signal Processing: Image Communication, 2019, 70: 79-88. |
| [2] | CHOUDHURY S, CHATTOPADHYAY S P, HAZRA T K. Vehicle detection and counting using Haar feature-based classifier [C]// Proceedings of the 8th Annual Industrial Automation and Electromechanical Engineering Conference. Piscataway: IEEE, 2017: 106-109. |
| [3] | WEI Y, TIAN Q, GUO J, et al. Multi-vehicle detection algorithm through combining Harr and HOG features [J]. Mathematics and Computers in Simulation, 2019, 155: 130-145. |
| [4] | 张依林,王学颖. 基于CNN-SVM的车辆检测与类型分类[J]. 电子技术与软件工程, 2022(7): 190-193. |
| ZHANG Y L, WANG X Y. Vehicle detection and type classification based on CNN-SVM[J]. Electronic Technology and Software Engineering, 2022(7): 190-193. | |
| [5] | LI Z, LIU F, YANG W, et al. A survey of convolutional neural networks: analysis, applications, and prospects [J]. IEEE Transactions on Neural Networks and Learning Systems, 2021, 33(12): 6999-7019. |
| [6] | LIANG F, ZHOU Y, CHEN X, et al. Review of target detection technology based on deep learning [C]// Proceedings of the 5th International Conference on Control Engineering and Artificial Intelligence. New York: ACM, 2021: 132-135. |
| [7] | KANG L, LU Z, MENG L, et al. YOLO-FA: type-1 fuzzy attention based YOLO detector for vehicle detection [J]. Expert Systems with Applications, 2024, 237(Pt B): No.121209. |
| [8] | LI Y, ZHANG M, ZHANG C, et al. YOLO-CCS: vehicle detection algorithm based on coordinate attention mechanism [J]. Digital Signal Processing, 2024, 153: No.104632. |
| [9] | CHENG X, QIU G, YU J, et al. An improved small object detection method based on Yolo V3 [J]. Pattern Analysis and Applications, 2021, 24(3): 1347-1355. |
| [10] | CAI Y, LUAN T, GAO H, et al. YOLOv4-5D: an effective and efficient object detector for autonomous driving [J]. IEEE Transactions on Instrumentation and Measurement, 2021, 70: No.4503613. |
| [11] | GUO L, ZHOU X, ZHAO Y, et al. Improved YOLOv7 algorithm incorporating InceptionNeXt and attention mechanism for vehicle detection under adverse lighting conditions [J]. Signal, Image and Video Processing, 2025, 19(4): No.299. |
| [12] | LIU L, LU S, ZHONG R, et al. Computing systems for autonomous driving: state of the art and challenges [J]. IEEE Internet of Things Journal, 2021, 8(8): 6469-6486. |
| [13] | LIU W, LU H, FU H, et al. Learning to upsample by learning to sample[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6004-6014. |
| [14] | DU D, XIE Y. Vehicle and pedestrian detection algorithm in an autonomous driving scene based on improved YOLOv8 [J]. Journal of Transportation Engineering, Part A: Systems, 2025, 151(1): No.8446. |
| [15] | LAU K W, PO L M, REHMAN Y A. Large separable kernel attention: rethinking the large kernel attention design in CNN [J]. Expert Systems with Applications, 2024, 236: No.121352. |
| [16] | GEIGER A, LENZ P, STILLER C, et al. Vision meets robotics: the KITTI dataset [J]. The International Journal of Robotics Research, 2013, 32(11): 1231-1237. |
| [17] | 赖勤波,马正华,朱蓉. 基于注意力机制和空洞卷积的无人机图像目标检测[J]. 计算机应用与软件, 2025, 42(2): 227-235. |
| LAI Q B, MA Z H, ZHU R. UAV image target detection based on attention mechanism and dilated convolution [J]. Computer Applications and Software, 2025, 42(2): 227-235. | |
| [18] | JEONG J, PARK H, KWAK N. Enhancement of SSD by concatenating feature maps for object detection [C]// Proceedings of the 2017 British Machine Vision Conference. Durham: BMVA Press, 2017: No.76. |
| [19] | LU X, SONG W. Improved YOLOv5s model for vehicle detection and recognition [C]// Proceedings of the 2022 International Conference on Intelligent Computing, LNCS 13395. Cham: Springer, 2022: 423-434. |
| [20] | LI C, LI L, JIANG H, et al. YOLOv6: a single-stage object detection framework for industrial applications [EB/OL]. [2025-07-22].. |
| [21] | BAKIRCI M, BAYRAKTAR I. YOLOv9-enabled vehicle detection for urban security and forensics applications[C]// Proceedings of the 12th International Symposium on Digital Forensics and Security. Piscataway: IEEE, 2024: 1-6. |
| [22] | BAKIRCI M. Enhancing vehicle detection in intelligent transportation systems via autonomous UAV platform and YOLOv8 integration[J]. Applied Soft Computing, 2024, 164: No.112015. |
| [23] | ZHANG H. Real-time pedestrian detection algorithm of YOLOv10 under complex lighting and occlusion conditions [C]// Proceedings of the 2024 International Conference on Advances in Electrical Engineering and Computer Applications. Piscataway: IEEE, 2024: 645-650. |
| [24] | LI Y, YANG W, WANG L, et al. HawkEye Conv-driven YOLOv10 with advanced feature pyramid networks for small object detection in UAV imagery [J]. Drones, 2024, 8(12): No.713. |
| [25] | VELYCHKO D, SINGH S, MARKOPOULOS P P, et al. Image preprocessing and YOLO architectures for enhanced small and slow-moving object detection[C]// Proceedings of the 2024 IEEE Western New York Image and Signal Processing Workshop. Piscataway: IEEE, 2024: 1-4. |
| [26] | LI B, QIN Z, MU Y, et al. Small-target-driven YOLOV10-WD: Wasserstein distance optimization and adaptive scale fusion[EB/OL]. [2025-07-08]. . |
| [27] | 高旭,闫奥函,范文博,等. 基于ResNet网络的烟叶成熟度图像识别[J]. 农业灾害研究, 2025, 15(2): 52-54. |
| GAO X, YAN A H, FAN W B, et al. Image recognition of tobacco leaf maturity based on ResNet network [J]. Journal of Agricultural Catastrophology, 2025, 15(2): 52-54. | |
| [28] | RUBAN S, MOOSA JABEER M, SHENOY BASTI R. Improvising breast cancer detection using CNN, VGG and SSD algorithms [C]// Proceedings of the 3rd International Conference on Intelligent Computing Instrumentation and Control Technologies. Piscataway: IEEE, 2022: 1772-1776. |
| [29] | MIAO T, ZENG H, YANG W, et al. An improved lightweight RetinaNet for ship detection in SAR images [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2022, 15: 4667-4679. |
| [30] | HUANG S, HE Y, CHEN X. M-YOLO: a nighttime vehicle detection method combining MobileNet v2 and YOLO v3 [J]. Journal of Physics: Conference Series, 2021, 1883: No.012094. |
| [31] | MURTHY C B, HASHMI M F, KESKAR A G. EfficientLiteDet: a real-time pedestrian and vehicle detection algorithm [J]. Machine Vision and Applications, 2022, 33(3): No.47. |
| [32] | DONG Z, WU Y, PEI M, et al. Vehicle type classification using a semisupervised convolutional neural network [J]. IEEE Transactions on Intelligent Transportation Systems, 2015, 16(4): 2247-2256. |
| [1] | Quanjie LIU, Zhaoyi GU, Chunyuan WANG. Unsafe driving behavior detection under complex lighting conditions [J]. Journal of Computer Applications, 2026, 46(2): 613-619. |
| [2] | Yuebo FAN, Mingxuan CHEN, Xian TANG, Yongbin GAO, Wenchao LI. Multi-dimensional frequency domain feature fusion for human-object interaction detection [J]. Journal of Computer Applications, 2026, 46(2): 580-586. |
| [3] | Mingguang LI, Chongben TAO. Hierarchical cross-modal fusion method for 3D object detection based on Mamba model [J]. Journal of Computer Applications, 2026, 46(2): 572-579. |
| [4] | Shiwei LI, Yufeng ZHOU, Pengfei SUN, Weisong LIU, Zhuxuan MENG, Haojie LIAN. Point cloud data augmentation method based on scattering and absorption effects of coal dust on LiDAR electromagnetic waves [J]. Journal of Computer Applications, 2026, 46(1): 331-340. |
| [5] | Shuwen HUANG, Keyu GUO, Xiangyu SONG, Feng HAN, Shijie SUN, Huansheng SONG. Multi-target 3D visual grounding method based on monocular images [J]. Journal of Computer Applications, 2026, 46(1): 207-215. |
| [6] | Yu SANG, Tong GONG, Chen ZHAO, Bowen YU, Siman LI. Domain-adaptive nighttime object detection method with photometric alignment [J]. Journal of Computer Applications, 2026, 46(1): 242-251. |
| [7] | Binhong XIE, Rui WANG, Rui ZHANG, Yingjun ZHANG. Agent prototype distillation algorithm for few-shot object detection [J]. Journal of Computer Applications, 2026, 46(1): 233-241. |
| [8] | Jiaxiang ZHANG, Xiaoming LI, Jiahui ZHANG. Few-shot object detection algorithm based on new category feature enhancement and metric mechanism [J]. Journal of Computer Applications, 2025, 45(9): 2984-2992. |
| [9] | Lili WEI, Lirong YAN, Xiaofen TANG. Contextual semantic representation and pixel relationship correction for few-shot object detection [J]. Journal of Computer Applications, 2025, 45(9): 2993-3002. |
| [10] | Binhong XIE, Yingkun LA, Yingjun ZHANG, Rui ZHANG. Semi-supervised object detection framework guided by self-paced learning [J]. Journal of Computer Applications, 2025, 45(8): 2546-2554. |
| [11] | Haiyang PENG, Weixing JI, Fawang LIU. Blockchain-based data notarization model for autonomous driving simulation testing [J]. Journal of Computer Applications, 2025, 45(8): 2421-2427. |
| [12] | Chengzhi YAN, Ying CHEN, Kai ZHONG, Han GAO. 3D object detection algorithm based on multi-scale network and axial attention [J]. Journal of Computer Applications, 2025, 45(8): 2537-2545. |
| [13] | Liang CHEN, Xuan WANG, Kun LEI. Helmet wearing detection algorithm for complex scenarios based on cross-layer multi-scale feature fusion [J]. Journal of Computer Applications, 2025, 45(7): 2333-2341. |
| [14] | Zimo ZHANG, Xuezhuan ZHAO. Multi-scale sparse graph guided vision graph neural networks [J]. Journal of Computer Applications, 2025, 45(7): 2188-2194. |
| [15] | Pingping YU, Yuting YAN, Xinliang TANG, He SU, Jianchao WANG. Multi-object tracking algorithm for construction machinery in transmission line scenarios [J]. Journal of Computer Applications, 2025, 45(7): 2351-2360. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||