


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (7): 2259-2266.DOI: 10.11772/j.issn.1001-9081.2025060788
• Multimedia computing and computer simulation • Previous Articles
Guoyou ZHANG( ), Hongyu NIE, Lihu PAN, Rundong LEI
), Hongyu NIE, Lihu PAN, Rundong LEI
Received:2025-07-16
Revised:2025-10-14
Accepted:2025-10-15
Online:2025-10-27
Published:2026-07-10
Contact:
Guoyou ZHANG
About author:NIE Hongyu, born in 2000, M. S. candidate. His research interests include broad learning, intelligent software engineering.Supported by:
张国有(), 聂宏宇, 潘理虎, 雷润东
通讯作者:
张国有
作者简介:聂宏宇(2000—),男,山东菏泽人,硕士研究生,主要研究方向:宽度学习、智能软件工程基金资助:CLC Number:
Guoyou ZHANG, Hongyu NIE, Lihu PAN, Rundong LEI. Point-MLPBLS: point cloud semantic segmentation network based on MLP cascaded broad learning system[J]. Journal of Computer Applications, 2026, 46(7): 2259-2266.
张国有, 聂宏宇, 潘理虎, 雷润东. 基于多层感知机级联宽度学习系统的点云语义分割网络Point-MLPBLS[J]. 《计算机应用》唯一官方网站, 2026, 46(7): 2259-2266.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025060788
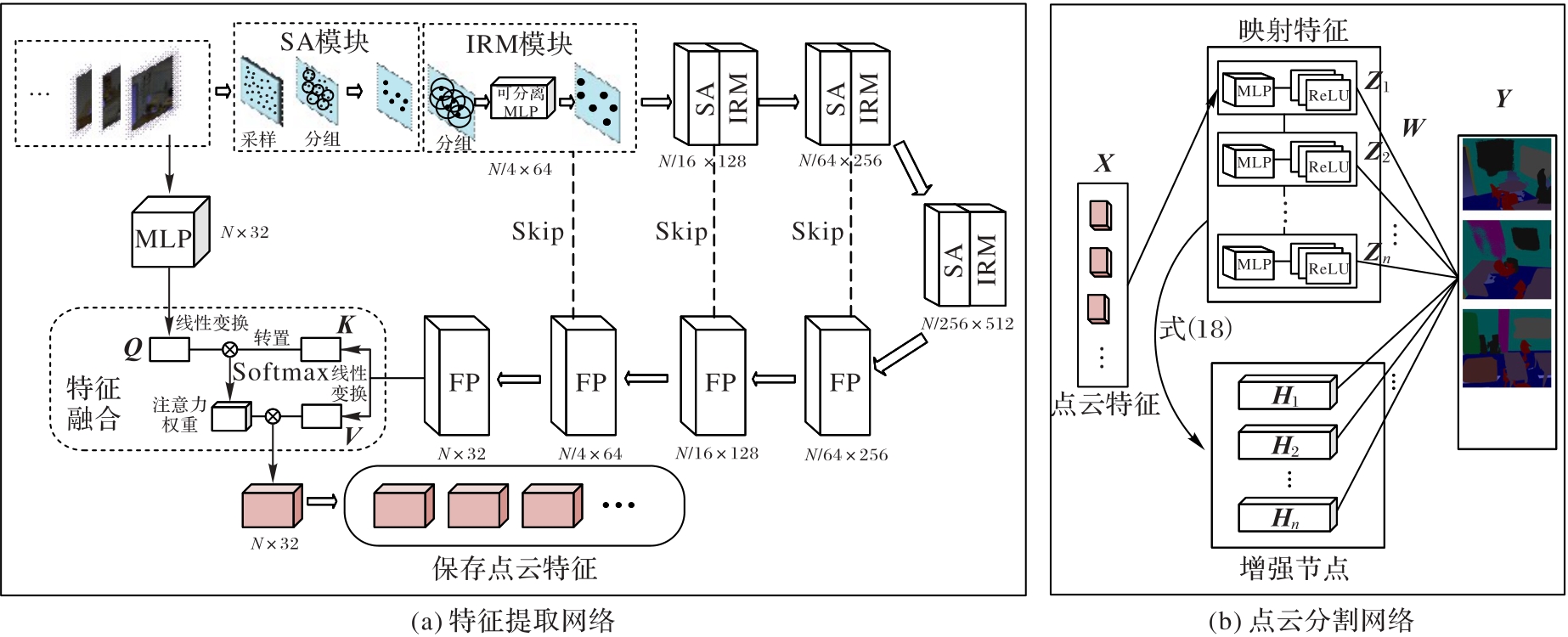
Fig. 1 Point-MLPBLS network
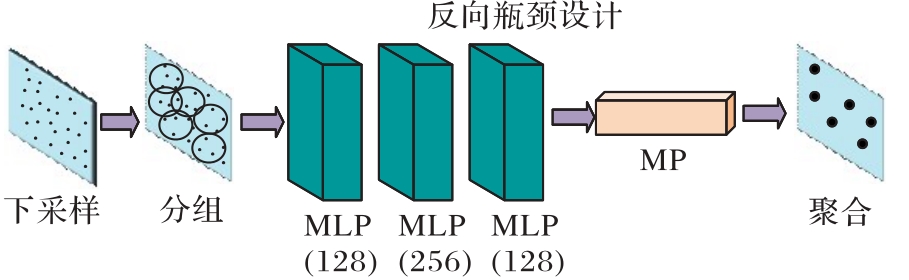
Fig. 2 SA module
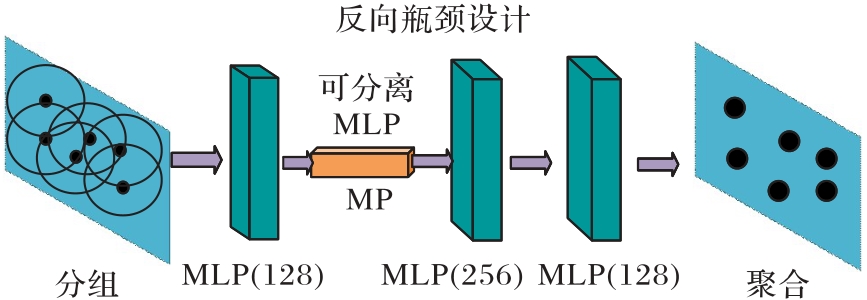
Fig. 3 IRM module
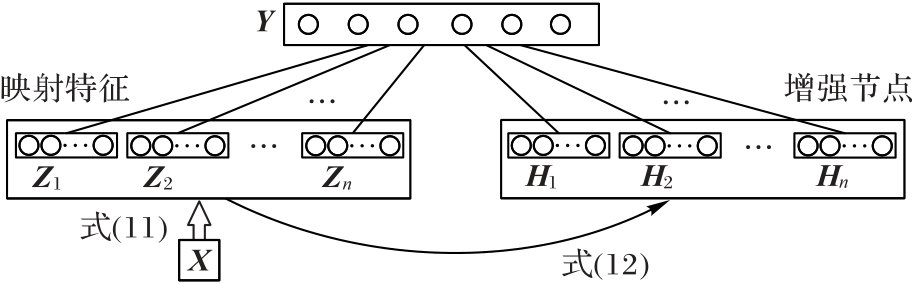
Fig. 4 Broad learning system network
| Nf | Ne | OA/% | mIoU/% |
|---|---|---|---|
| 100 | 5 000 | 87.7 | 67.2 |
| 100 | 10 000 | 87.9 | 67.4 |
| 200 | 10 000 | 88.3 | 67.7 |
| 200 | 12 000 | 88.6 | 68.0 |
| 400 | 10 000 | 88.8 | 68.3 |
| 400 | 11 000 | 88.5 | 68.1 |
| 800 | 10 000 | 88.2 | 67.8 |
| 800 | 12 000 | 87.9 | 67.7 |
| 1 000 | 10 000 | 87.7 | 67.4 |
| 1 000 | 13 000 | 87.5 | 67.4 |
| 2 000 | 12 000 | 87.4 | 67.2 |
Tab. 1 Comparison of experimental results of MLPBLS-seg with different Nf and Ne
| Nf | Ne | OA/% | mIoU/% |
|---|---|---|---|
| 100 | 5 000 | 87.7 | 67.2 |
| 100 | 10 000 | 87.9 | 67.4 |
| 200 | 10 000 | 88.3 | 67.7 |
| 200 | 12 000 | 88.6 | 68.0 |
| 400 | 10 000 | 88.8 | 68.3 |
| 400 | 11 000 | 88.5 | 68.1 |
| 800 | 10 000 | 88.2 | 67.8 |
| 800 | 12 000 | 87.9 | 67.7 |
| 1 000 | 10 000 | 87.7 | 67.4 |
| 1 000 | 13 000 | 87.5 | 67.4 |
| 2 000 | 12 000 | 87.4 | 67.2 |
| 网络 | mIoU/% | OA/% | mAcc/% | 分割时间/min |
|---|---|---|---|---|
| PointNet[ | 42.3 | 80.4 | 62.1 | 46.2 |
| PointNet++[ | 55.2 | 82.6 | 68.8 | 53.8 |
| DGCNN[ | 48.6 | 82.8 | 70.2 | 49.6 |
| PointCNN[ | 62.6 | 83.9 | 72.3 | 50.2 |
| Point Transformer[ | 69.6 | 91.1 | 79.7 | 61.7 |
| PointNeXt[ | 67.2 | 87.3 | 76.4 | 55.3 |
| Point-MLPBLS | 68.1 | 88.7 | 79.1 | 31.7 |
Tab. 2 Experimental results of semantic segmentation on Area5 in S3DIS dataset
| 网络 | mIoU/% | OA/% | mAcc/% | 分割时间/min |
|---|---|---|---|---|
| PointNet[ | 42.3 | 80.4 | 62.1 | 46.2 |
| PointNet++[ | 55.2 | 82.6 | 68.8 | 53.8 |
| DGCNN[ | 48.6 | 82.8 | 70.2 | 49.6 |
| PointCNN[ | 62.6 | 83.9 | 72.3 | 50.2 |
| Point Transformer[ | 69.6 | 91.1 | 79.7 | 61.7 |
| PointNeXt[ | 67.2 | 87.3 | 76.4 | 55.3 |
| Point-MLPBLS | 68.1 | 88.7 | 79.1 | 31.7 |
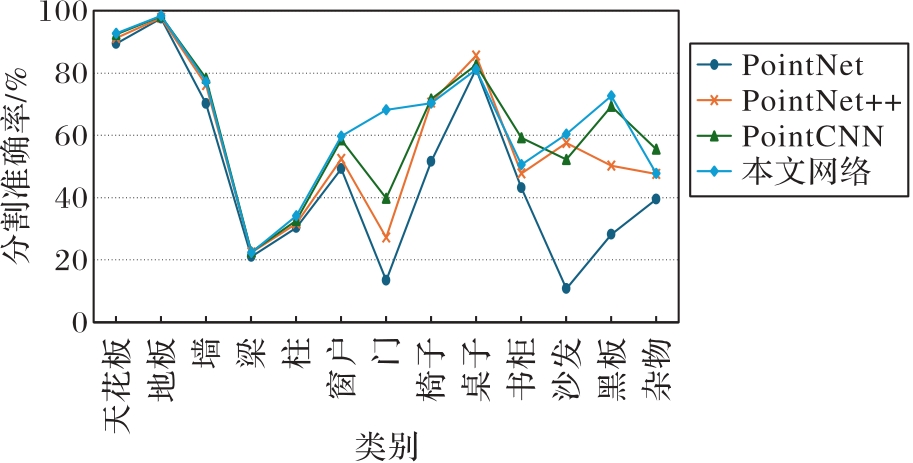
Fig. 5 Segmentation accuracies of objects of different categories
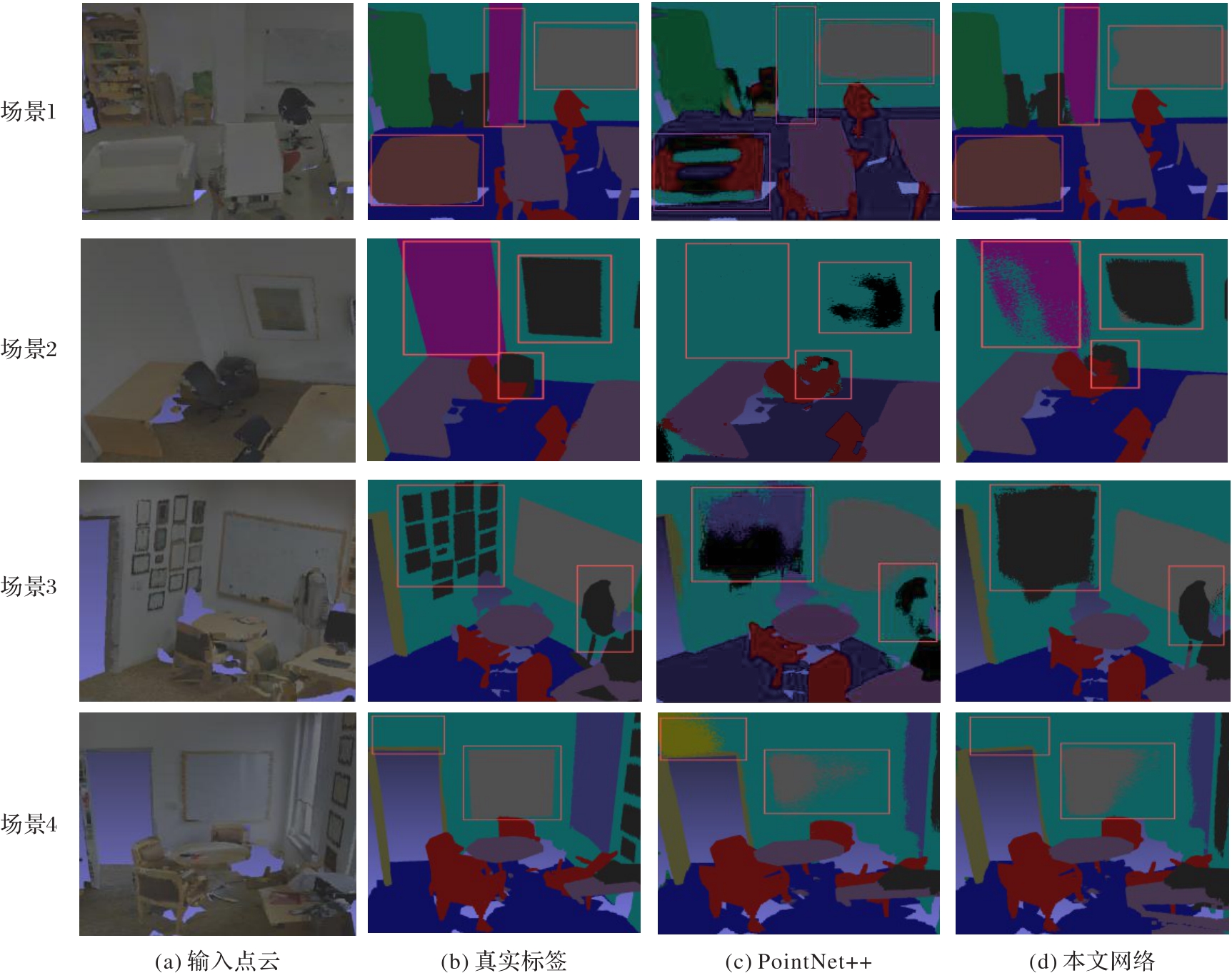
Fig. 6 Visual comparison results of semantic segmentation
倒置残差 模块 | 特征 融合模块 | BLS多层感知机级联结构 | 激活函数ReLU | OA/% |
|---|---|---|---|---|
| 86.3 | ||||
| √ | 87.2 | |||
| √ | √ | 87.6 | ||
| √ | √ | √ | 88.4 | |
| √ | √ | √ | √ | 88.7 |
| √ | 86.8 | |||
| √ | 87.0 | |||
| √ | 86.5 | |||
| √ | √ | 87.5 | ||
| √ | √ | √ | 88.5 | |
| √ | √ | √ | 88.1 |
Tab. 3 Results of ablation experiments
倒置残差 模块 | 特征 融合模块 | BLS多层感知机级联结构 | 激活函数ReLU | OA/% |
|---|---|---|---|---|
| 86.3 | ||||
| √ | 87.2 | |||
| √ | √ | 87.6 | ||
| √ | √ | √ | 88.4 | |
| √ | √ | √ | √ | 88.7 |
| √ | 86.8 | |||
| √ | 87.0 | |||
| √ | 86.5 | |||
| √ | √ | 87.5 | ||
| √ | √ | √ | 88.5 | |
| √ | √ | √ | 88.1 |
| 全连接网络 | BLS | MLPBLS | mAcc/% | 分割时间/min |
|---|---|---|---|---|
| √ | 79.4 | 23.3 | ||
| √ | 77.6 | 2.0 | ||
| √ | 79.1 | 2.6 |
Tab. 4 Performance comparison of different networks as point cloud segmentation networks
| 全连接网络 | BLS | MLPBLS | mAcc/% | 分割时间/min |
|---|---|---|---|---|
| √ | 79.4 | 23.3 | ||
| √ | 77.6 | 2.0 | ||
| √ | 79.1 | 2.6 |
| [1] | Wang J, Liu Y, Tan H, et al. A survey on weakly supervised 3D point cloud semantic segmentation[J]. IET Computer Vision, 2024, 18(3): 329-342. |
| [2] | Mi X, Yang B, Chen C, et al. Automatic road structure detection and vectorization using MLS point clouds [J]. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 2019, XLII-2/W12: 1069-1075. |
| [3] | Qin H, Shao S, Wang T, et al. Review of autonomous path planning algorithms for mobile robots [J]. Drones, 2023, 7(3): No.211. |
| [4] | Tan C S, Mohd-Mokhtar R, Arshad M R. A comprehensive review of coverage path planning in robotics using classical and heuristic algorithms[J]. IEEE Access, 2021, 9: 119310-119342. |
| [5] | 饶加旺,周松,邢策梅,等.城市三维模型通用格式转换与可视化研究[J].计算机科学与应用, 2023, 13(4): 903-914. |
| Rao Jiawang, Zhou Song, Xing Cemei, et al. Research on universal format conversion and visualization of urban 3D model [J]. Computer Science and Applications, 2023, 13(4): 903-914. | |
| [6] | 王明军,李乐,易芳,等.模拟真实水体环境下目标激光点云数据的三维重建与分析[J].中国激光, 2022, 49(3): No.0309001. |
| Wang Mingjun, Li Le, Yi Fang, et al. Three-dimensional reconstruction and analysis of target laser point cloud data in simulated real water environment [J]. Chinese Journal of Lasers, 2022, 49(3): No.0309001. | |
| [7] | 王涛,王文举,蔡宇.基于深度学习的三维点云语义分割方法研究[J].计算机工程与应用, 2021, 57(23): 18-26. |
| Wang Tao, Wang Wenju, Cai Yu. Research of deep learning-based semantic segmentation for 3D point cloud [J]. Computer Engineering and Applications, 2021, 57(23): 18-26. | |
| [8] | Qi C R, Su H, Mo K C, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// CVPR 2017. Piscataway: IEEE, 2017: 77-85. |
| [9] | Qi C R, Yi L, Su H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space [C]// NeurIPS 2017. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| [10] | Huang Q, Wang W, Neumann U. Recurrent slice networks for 3D segmentation of point clouds [C]// CVPR 2018. Piscataway: IEEE, 2018: 2626-2635. |
| [11] | Wang Y, Sun Y, Liu Z, et al. Dynamic graph CNN for learning on point clouds [J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [12] | Hua B S, Tran M K, Yeung S K. Pointwise convolutional neural networks [C]// CVPR 2018. Piscataway: IEEE, 2018: 984-993. |
| [13] | Simonovsky M, Komodakis N. Dynamic edge-conditioned filters in convolutional neural networks on graphs [C]// CVPR 2017. Piscataway: IEEE, 2017: 29-38. |
| [14] | Ma Y, Guo Y, Liu H, et al. Global context reasoning for semantic segmentation of 3D point clouds [C]// WACV 2020. Piscataway: IEEE, 2020: 2920-2929. |
| [15] | Park C, Jeong Y, Cho M, et al. Fast point Transformer [C]// CVPR 2022. Piscataway: IEEE, 2022: 16928-16937. |
| [16] | Chen C L P, Liu Z. Broad learning system: an effective and efficient incremental learning system without the need for deep architecture [J]. IEEE Transactions on Neural Networks and Learning Systems, 2018, 29(1): 10-24. |
| [17] | Armeni I, Sener O, Zamir A R, et al. 3D semantic parsing of large-scale indoor spaces [C]// CVPR 2016. Piscataway: IEEE, 2016: 1534-1543. |
| [18] | Li Y, Bu R, Sun M, et al. PointCNN: convolution on X-Transformed points [C]// NeurIPS 2018. Red Hook: Curran Associates Inc., 2018: 828-838. |
| [19] | Qian G, Li Y, Peng H, et al. PointNeXt: revisiting PointNet++ with improved training and scaling strategies [C]// NeurIPS 2022. Red Hook: Curran Associates Inc., 2022: 23192-23204. |
| [1] | Liu WANG, Xuebin CHEN, Yuan GAO, Kaiguang MA, Tong ZHAO. Dual-channel recommendation algorithm based on FFT denoising and reverse path collaborative enhancement [J]. Journal of Computer Applications, 2026, 46(7): 2130-2138. |
| [2] | Yasong ZHANG, Bihui CONG, Shuang XU. Graph neural network node classification model incorporating clustering coefficients [J]. Journal of Computer Applications, 2026, 46(6): 1855-1862. |
| [3] | Jinxiao ZHANG, Chenglong LI, Xinyan GAO, Ming ZHANG. 3D human pose estimation model based on temporal-spatial feature pyramid network and multi-hypothesis interaction mechanism [J]. Journal of Computer Applications, 2026, 46(6): 1965-1972. |
| [4] | Yunping HE, Leichun WANG, Ruirui SONG, Xiangfeng LU, Jinxiang WEI, Xiaomeng LIU. Dual-channel multimodal sentiment analysis model based on contrast invariance and reinforcement specificity [J]. Journal of Computer Applications, 2026, 46(6): 1767-1775. |
| [5] | Liwan YAO, Hailong LIU, Zhangfan ZENG. Frequency-domain driven and diffusion-based fusion for sonar image enhancement algorithm [J]. Journal of Computer Applications, 2026, 46(6): 1947-1955. |
| [6] | Songhao ZHU, Zhiyun ZHAO, Mengling WANG. Low-light image enhancement network based on lightweight residual and brightness-aware dynamic feature fusion [J]. Journal of Computer Applications, 2026, 46(6): 1936-1946. |
| [7] | Chao LYU, Geyao MA. Lightweight human pose estimation network based on redundant feature suppression [J]. Journal of Computer Applications, 2026, 46(6): 1973-1980. |
| [8] | Jun QIN, Xintao JIAO, Biqing ZENG. Non-intrusive load monitoring method combining BiLSTM-Transformer and Kolmogorov-Arnold network [J]. Journal of Computer Applications, 2026, 46(6): 2026-2033. |
| [9] | Jing HU, Shikun CHEN, Fang WANG, Rui ZHANG, Yong WANG. Ore image segmentation with linear deformable convolution and dual-domain synergistic dynamic attention [J]. Journal of Computer Applications, 2026, 46(5): 1692-1702. |
| [10] | Qianfei WANG, Yang LI, Deyu LI, Suge WANG. Dual-channel feature fusion representation method for short-text clustering based on large language model [J]. Journal of Computer Applications, 2026, 46(5): 1441-1449. |
| [11] | Xuechao LIAO, Rui CHEN. Prediction-evaluation framework for anomaly detection in electric vehicle lithium-ion battery [J]. Journal of Computer Applications, 2026, 46(5): 1614-1623. |
| [12] | Huaze ZHU, Weihao WANG, Mingyu YOU, Hongjun ZHOU. 3D part assembly method based on line drawing segmentation [J]. Journal of Computer Applications, 2026, 46(5): 1545-1550. |
| [13] | Ying JING, Ran LI, Zhuo JIANG, Ziyang FU, Jingyi DU, Qi LIU, Jihang LIU. SAM Meibomian gland unified dense segmentation method with introduction of automatic prompt encoder [J]. Journal of Computer Applications, 2026, 46(5): 1667-1676. |
| [14] | Baoyuan ZHENG, Chaobo HE. Graph convolutional network enhanced by graph diffusion and dual-view feature learning [J]. Journal of Computer Applications, 2026, 46(5): 1370-1377. |
| [15] | Minqi WU, Yuanhua YANG, Hang LI, Yaqin HU, Zhihao TANG, Teng MEI. Lightweight underwater small object detection based on graph Transformer and RT-DETR [J]. Journal of Computer Applications, 2026, 46(5): 1586-1595. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||