


Journal of Computer Applications ›› 2024, Vol. 44 ›› Issue (6): 1920-1926.DOI: 10.11772/j.issn.1001-9081.2023060866
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Yaxing BING1( ), Yangping WANG1,2, Jiu YONG2, Haomou BAI3
), Yangping WANG1,2, Jiu YONG2, Haomou BAI3
Received:2023-07-03
Revised:2023-09-06
Accepted:2023-09-11
Online:2023-10-07
Published:2024-06-10
Contact:
Yaxing BING
About author:WANG Yangping, born in 1973, Ph. D., professor. Her research interests include digital image processing, virtual reality.Supported by:
邴雅星1(), 王阳萍1,2, 雍玖2, 白浩谋3
通讯作者:
邴雅星
作者简介:王阳萍(1973—),女,四川达州人,教授,博士,主要研究方向:数字图像处理、虚拟现实基金资助:CLC Number:
Yaxing BING, Yangping WANG, Jiu YONG, Haomou BAI. Six degrees of freedom object pose estimation algorithm based on filter learning network[J]. Journal of Computer Applications, 2024, 44(6): 1920-1926.
邴雅星, 王阳萍, 雍玖, 白浩谋. 基于筛选学习网络的六自由度目标位姿估计算法[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1920-1926.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2023060866
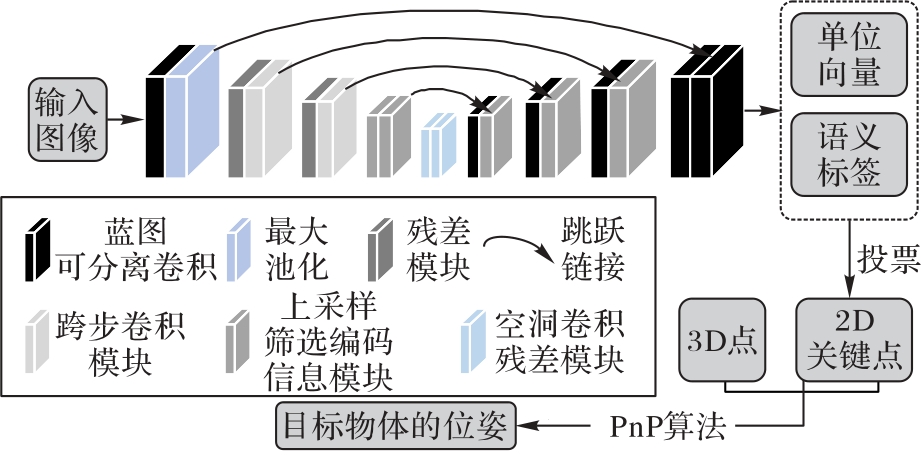
Fig.1 Overall framework of filter learning network model
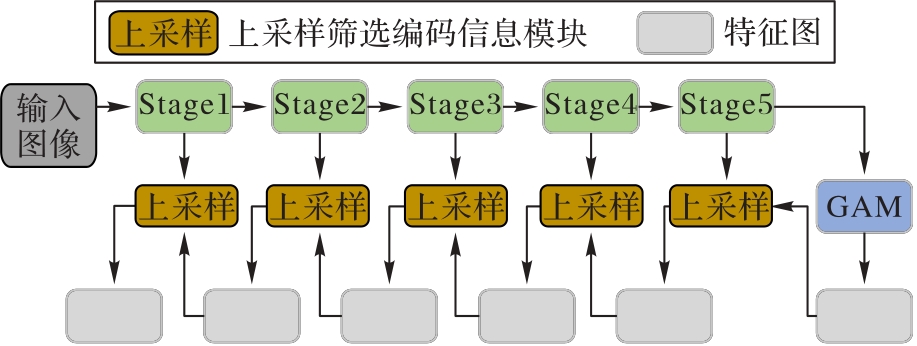
Fig.2 Network structure for upsampling, filtering and encoding information
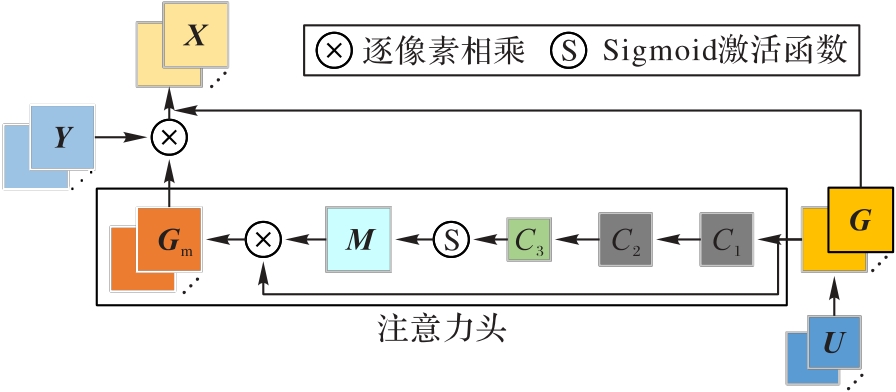
Fig.3 Structure of UFAEM
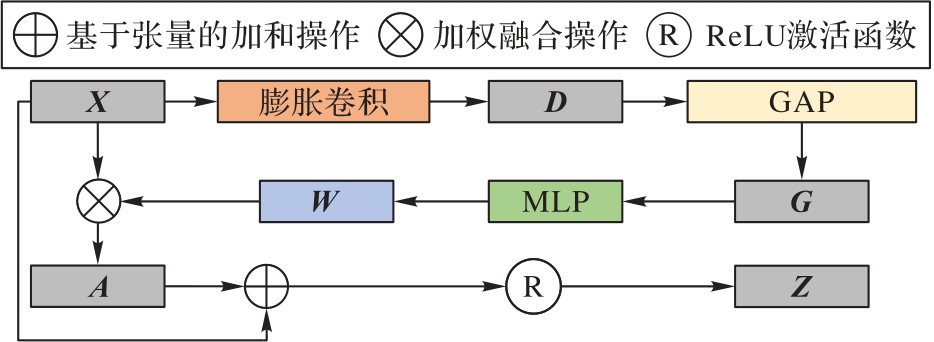
Fig.4 Structure of GAM
| 算法 | 测试物体 | 平均值 | |||||
|---|---|---|---|---|---|---|---|
| ape | cam | cat | duck | holepuncher | phone | ||
| ResNet18 | 43.6 | 86.9 | 79.3 | 52.6 | 81.9 | 92.4 | 72.8 |
| BSConv+GeLU | 55.2 | 89.4 | 85.6 | 67.8 | 83.2 | 93.5 | 79.1 |
BSConv+GeLU+ UFAEM | 85.1 | 94.8 | 90.7 | 84.3 | 88.1 | 95.1 | 89.7 |
BSConv+GeLU+ UFAEM+GAM | 89.7 | 95.6 | 93.1 | 90.8 | 89.7 | 95.9 | 92.5 |
Tab.1 Impact of different modules on model accuracy
| 算法 | 测试物体 | 平均值 | |||||
|---|---|---|---|---|---|---|---|
| ape | cam | cat | duck | holepuncher | phone | ||
| ResNet18 | 43.6 | 86.9 | 79.3 | 52.6 | 81.9 | 92.4 | 72.8 |
| BSConv+GeLU | 55.2 | 89.4 | 85.6 | 67.8 | 83.2 | 93.5 | 79.1 |
BSConv+GeLU+ UFAEM | 85.1 | 94.8 | 90.7 | 84.3 | 88.1 | 95.1 | 89.7 |
BSConv+GeLU+ UFAEM+GAM | 89.7 | 95.6 | 93.1 | 90.8 | 89.7 | 95.9 | 92.5 |
| 函数 | 测试物体 | 平均值 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ape | bench-wise | cam | can | cat | driller | duck | egg-box | glue | holepuncher | iron | lamp | phone | ||
| Sigmoid | 86.7 | 99.8 | 91.2 | 93.1 | 90.8 | 98.4 | 85.1 | 99.5 | 95.2 | 85.2 | 96.3 | 99.1 | 94.0 | 93.4 |
| ReLU | 87.9 | 100.0 | 90.2 | 94.6 | 93.0 | 99.5 | 88.2 | 100.0 | 90.9 | 88.4 | 97.1 | 99.0 | 94.2 | 94.1 |
| GeLU | 89.7 | 100.0 | 95.6 | 96.2 | 93.1 | 99.8 | 90.8 | 100.0 | 98.5 | 89.7 | 99.8 | 99.4 | 95.9 | 96.0 |
Tab.2 Impact of different activation functions on model accuracy
| 函数 | 测试物体 | 平均值 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ape | bench-wise | cam | can | cat | driller | duck | egg-box | glue | holepuncher | iron | lamp | phone | ||
| Sigmoid | 86.7 | 99.8 | 91.2 | 93.1 | 90.8 | 98.4 | 85.1 | 99.5 | 95.2 | 85.2 | 96.3 | 99.1 | 94.0 | 93.4 |
| ReLU | 87.9 | 100.0 | 90.2 | 94.6 | 93.0 | 99.5 | 88.2 | 100.0 | 90.9 | 88.4 | 97.1 | 99.0 | 94.2 | 94.1 |
| GeLU | 89.7 | 100.0 | 95.6 | 96.2 | 93.1 | 99.8 | 90.8 | 100.0 | 98.5 | 89.7 | 99.8 | 99.4 | 95.9 | 96.0 |
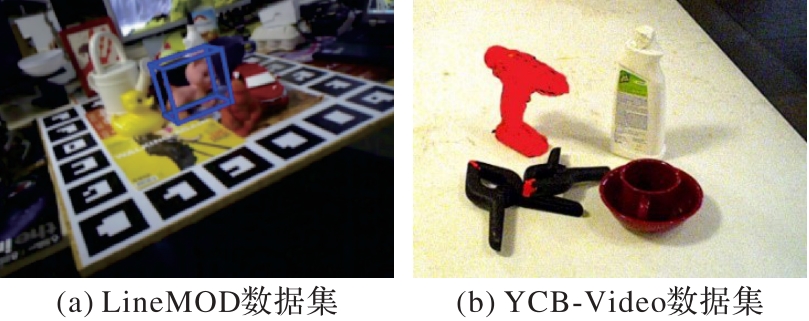
Fig. 5 Visualization results on different datasets
| 算法 | 测试物体 | 平均值 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ape | bench-wise | cam | can | cat | driller | duck | egg-box | glue | holepuncher | iron | lamp | phone | ||
| real-time | 21.6 | 81.8 | 36.6 | 68.8 | 41.8 | 63.5 | 27.2 | 69.9 | 80.0 | 42.6 | 74.9 | 71.1 | 47.7 | 55.9 |
| PoseCNN | 77.0 | 97.5 | 93.5 | 96.5 | 82.1 | 95.0 | 77.7 | 97.1 | 99.4 | 52.8 | 98.3 | 97.5 | 87.7 | 88.6 |
| Dense-Fusion | 92.3 | 93.2 | 94.4 | 93.1 | 96.5 | 87.0 | 92.3 | 99.8 | 100 | 92.1 | 97.0 | 95.3 | 92.8 | 94.3 |
| Dual-Stream | 91.3 | 93.5 | 94.0 | 94.3 | 95.8 | 92.9 | 94.7 | 99.9 | 99.9 | 92.8 | 95.1 | 94.6 | 94.0 | 94.8 |
| PVNet | 43.6 | 99.9 | 86.9 | 95.5 | 79.3 | 96.4 | 52.6 | 99.2 | 95.7 | 81.9 | 98.9 | 99.3 | 92.4 | 86.3 |
| 本文算法 | 89.7 | 100.0 | 95.6 | 96.2 | 93.1 | 99.8 | 90.8 | 100.0 | 98.5 | 89.7 | 99.8 | 99.4 | 95.9 | 96.0 |
Tab.3 Comparison of accuracy results on LineMOD dataset
| 算法 | 测试物体 | 平均值 | ||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ape | bench-wise | cam | can | cat | driller | duck | egg-box | glue | holepuncher | iron | lamp | phone | ||
| real-time | 21.6 | 81.8 | 36.6 | 68.8 | 41.8 | 63.5 | 27.2 | 69.9 | 80.0 | 42.6 | 74.9 | 71.1 | 47.7 | 55.9 |
| PoseCNN | 77.0 | 97.5 | 93.5 | 96.5 | 82.1 | 95.0 | 77.7 | 97.1 | 99.4 | 52.8 | 98.3 | 97.5 | 87.7 | 88.6 |
| Dense-Fusion | 92.3 | 93.2 | 94.4 | 93.1 | 96.5 | 87.0 | 92.3 | 99.8 | 100 | 92.1 | 97.0 | 95.3 | 92.8 | 94.3 |
| Dual-Stream | 91.3 | 93.5 | 94.0 | 94.3 | 95.8 | 92.9 | 94.7 | 99.9 | 99.9 | 92.8 | 95.1 | 94.6 | 94.0 | 94.8 |
| PVNet | 43.6 | 99.9 | 86.9 | 95.5 | 79.3 | 96.4 | 52.6 | 99.2 | 95.7 | 81.9 | 98.9 | 99.3 | 92.4 | 86.3 |
| 本文算法 | 89.7 | 100.0 | 95.6 | 96.2 | 93.1 | 99.8 | 90.8 | 100.0 | 98.5 | 89.7 | 99.8 | 99.4 | 95.9 | 96.0 |
| 算法 | 测试物体 | 平均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ape | can | cat | driller | duck | eggbox | glue | holepuncher | ||
| HybridPose | 20.9 | 75.3 | 24.9 | 70.2 | 27.9 | 52.4 | 53.8 | 54.2 | 47.5 |
| SSPE | 19.2 | 65.1 | 18.9 | 69.0 | 25.3 | 52.0 | 51.4 | 45.6 | 43.3 |
| RePOSE | 31.1 | 80.0 | 25.6 | 73.1 | 43.0 | 51.7 | 54.3 | 53.6 | 51.6 |
| SegDriven | 12.1 | 39.9 | 8.2 | 45.2 | 17.2 | 22.1 | 35.8 | 36.0 | 27.0 |
| PoseCNN | 9.6 | 45.2 | 0.9 | 41.4 | 19.6 | 22.0 | 38.5 | 22.1 | 24.9 |
| PVNet | 15.8 | 63.3 | 16.7 | 65.7 | 25.2 | 50.2 | 49.6 | 39.7 | 40.8 |
| 本文算法 | 23.1 | 72.6 | 24.4 | 74.4 | 26.0 | 53.1 | 54.5 | 50.7 | 47.4 |
Tab.4 Comparison of accuracy results on Occlusion LineMOD dataset
| 算法 | 测试物体 | 平均值 | |||||||
|---|---|---|---|---|---|---|---|---|---|
| ape | can | cat | driller | duck | eggbox | glue | holepuncher | ||
| HybridPose | 20.9 | 75.3 | 24.9 | 70.2 | 27.9 | 52.4 | 53.8 | 54.2 | 47.5 |
| SSPE | 19.2 | 65.1 | 18.9 | 69.0 | 25.3 | 52.0 | 51.4 | 45.6 | 43.3 |
| RePOSE | 31.1 | 80.0 | 25.6 | 73.1 | 43.0 | 51.7 | 54.3 | 53.6 | 51.6 |
| SegDriven | 12.1 | 39.9 | 8.2 | 45.2 | 17.2 | 22.1 | 35.8 | 36.0 | 27.0 |
| PoseCNN | 9.6 | 45.2 | 0.9 | 41.4 | 19.6 | 22.0 | 38.5 | 22.1 | 24.9 |
| PVNet | 15.8 | 63.3 | 16.7 | 65.7 | 25.2 | 50.2 | 49.6 | 39.7 | 40.8 |
| 本文算法 | 23.1 | 72.6 | 24.4 | 74.4 | 26.0 | 53.1 | 54.5 | 50.7 | 47.4 |
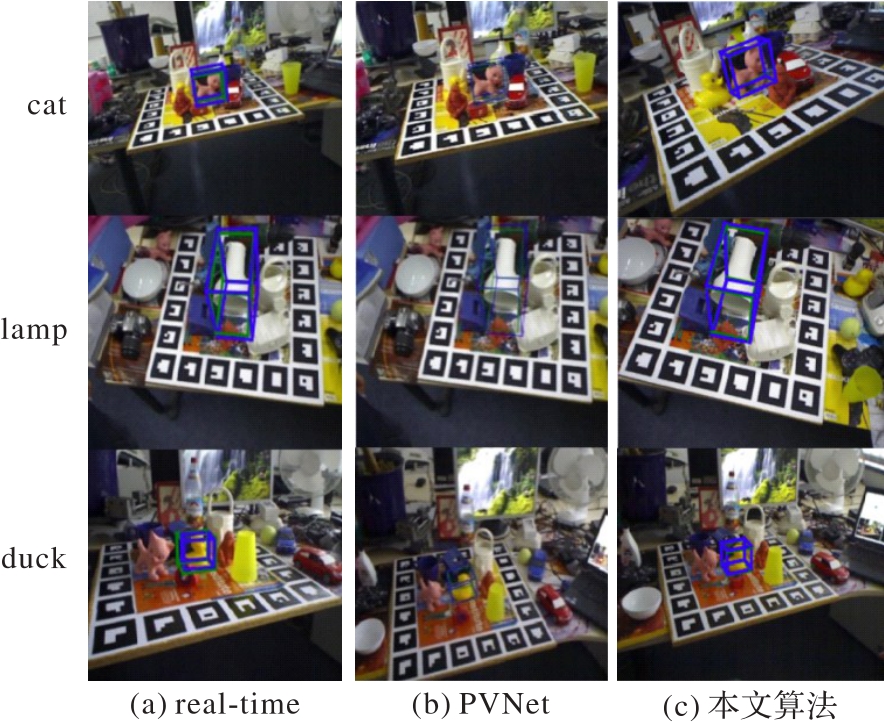
Fig.6 Visualization results of pose estimation
| 测试物体 | PoseCNN | DenseFusion | 本文算法 | |||
|---|---|---|---|---|---|---|
| ADD-S | ADD(S) | ADD-S | ADD(S) | ADD-S | ADD(S) | |
| 平均值 | 75.9 | 59.9 | 91.2 | 82.9 | 92.5 | 88.1 |
| 02 master chef can | 83.9 | 50.2 | 95.3 | 70.7 | 95.0 | 76.9 |
| 03 cracker box | 76.9 | 53.1 | 92.5 | 86.9 | 94.2 | 90.2 |
| 04 sugar box | 84.2 | 68.4 | 95.1 | 90.8 | 96.1 | 93.9 |
| 05 tomato soup can | 81.0 | 66.2 | 93.8 | 84.7 | 94.7 | 88.1 |
| 06 mustard bottle | 90.4 | 81.0 | 95.8 | 90.9 | 96.3 | 93.2 |
| 07 tuna fish can | 88.0 | 70.7 | 95.7 | 79.6 | 95.1 | 89.5 |
| 08 pudding box | 79.1 | 62.7 | 94.3 | 89.3 | 93.7 | 88.1 |
| 09 gelatin box | 87.2 | 75.2 | 97.2 | 95.8 | 96.0 | 94.6 |
| 10 potted meat can | 78.5 | 59.5 | 89.3 | 79.6 | 90.2 | 82.0 |
| 11 banana | 86.0 | 72.3 | 90.0 | 76.7 | 93.2 | 91.0 |
| 19 pitcher base | 77.0 | 53.3 | 93.6 | 87.1 | 91.2 | 86.0 |
| 21 bleach cleanser | 71.6 | 50.3 | 94.4 | 87.5 | 95.5 | 86.7 |
| 24 bowl* | 69.6 | 69.6 | 86.0 | 86.0 | 87.8 | 87.8 |
| 25 mug | 78.2 | 58.5 | 95.3 | 83.8 | 96.9 | 92.1 |
| 35 power drill | 72.7 | 55.3 | 92.1 | 83.7 | 95.4 | 92.3 |
| 36 wood block* | 64.3 | 64.3 | 89.5 | 89.5 | 88.7 | 88.7 |
| 37 scissors | 56.9 | 35.8 | 90.1 | 77.4 | 92.1 | 88.1 |
| 40 large marker | 71.7 | 58.3 | 95.1 | 89.1 | 93.2 | 84.0 |
| 51 large clamp* | 50.2 | 50.2 | 71.5 | 71.5 | 79.3 | 79.3 |
| 52 extra large clamp* | 44.1 | 44.1 | 70.2 | 70.2 | 86.0 | 86.0 |
| 61 foam brick* | 88.0 | 88.0 | 92.2 | 92.2 | 92.1 | 92.1 |
Tab.5 Comparison of accuracy results on YCB-Video dataset
| 测试物体 | PoseCNN | DenseFusion | 本文算法 | |||
|---|---|---|---|---|---|---|
| ADD-S | ADD(S) | ADD-S | ADD(S) | ADD-S | ADD(S) | |
| 平均值 | 75.9 | 59.9 | 91.2 | 82.9 | 92.5 | 88.1 |
| 02 master chef can | 83.9 | 50.2 | 95.3 | 70.7 | 95.0 | 76.9 |
| 03 cracker box | 76.9 | 53.1 | 92.5 | 86.9 | 94.2 | 90.2 |
| 04 sugar box | 84.2 | 68.4 | 95.1 | 90.8 | 96.1 | 93.9 |
| 05 tomato soup can | 81.0 | 66.2 | 93.8 | 84.7 | 94.7 | 88.1 |
| 06 mustard bottle | 90.4 | 81.0 | 95.8 | 90.9 | 96.3 | 93.2 |
| 07 tuna fish can | 88.0 | 70.7 | 95.7 | 79.6 | 95.1 | 89.5 |
| 08 pudding box | 79.1 | 62.7 | 94.3 | 89.3 | 93.7 | 88.1 |
| 09 gelatin box | 87.2 | 75.2 | 97.2 | 95.8 | 96.0 | 94.6 |
| 10 potted meat can | 78.5 | 59.5 | 89.3 | 79.6 | 90.2 | 82.0 |
| 11 banana | 86.0 | 72.3 | 90.0 | 76.7 | 93.2 | 91.0 |
| 19 pitcher base | 77.0 | 53.3 | 93.6 | 87.1 | 91.2 | 86.0 |
| 21 bleach cleanser | 71.6 | 50.3 | 94.4 | 87.5 | 95.5 | 86.7 |
| 24 bowl* | 69.6 | 69.6 | 86.0 | 86.0 | 87.8 | 87.8 |
| 25 mug | 78.2 | 58.5 | 95.3 | 83.8 | 96.9 | 92.1 |
| 35 power drill | 72.7 | 55.3 | 92.1 | 83.7 | 95.4 | 92.3 |
| 36 wood block* | 64.3 | 64.3 | 89.5 | 89.5 | 88.7 | 88.7 |
| 37 scissors | 56.9 | 35.8 | 90.1 | 77.4 | 92.1 | 88.1 |
| 40 large marker | 71.7 | 58.3 | 95.1 | 89.1 | 93.2 | 84.0 |
| 51 large clamp* | 50.2 | 50.2 | 71.5 | 71.5 | 79.3 | 79.3 |
| 52 extra large clamp* | 44.1 | 44.1 | 70.2 | 70.2 | 86.0 | 86.0 |
| 61 foam brick* | 88.0 | 88.0 | 92.2 | 92.2 | 92.1 | 92.1 |
| 1 | 刘泽洋,贾迪.面向目标6DoF姿态与尺寸估计的全卷积神经网络模型[J].计算机应用研究,2023,40(3):938-942. |
| LIU Z Y, JIA D. Full convolution neural network model for 6DoF attitude and size estimation[J]. Application Research of Computers, 2023,40(3): 938-942. | |
| 2 | LINDEBERG T. Scale invariant feature transform[J]. Scholarpedia, 2012, 7(5):10491. |
| 3 | BAY H, TUYTELAARS T, VAN G L.SURF: speeded up robust features[C]// Proceedings of the 9th European Conference on Computer Vision. Berlin: Springer, 2006:404-417. |
| 4 | RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]// Proceedings of the 2011 International Conference on Computer Vision. Piscataway:IEEE, 2011: 2564-2571. |
| 5 | MAIR E, HAGER G D, BURSCHKA D, et al. Adaptive and generic corner detection based on the accelerated segment test[C]// Proceedings of the 11th European Conference on Computer Vision. Berlin: Springer, 2010:183-196. |
| 6 | CALONDER M, LEPETIT V, STRECHA C, et al. BRIEF: binary robust independent elementary features[C]// Proceedings of the 11th European Conference on Computer Vision. Berlin:Springer, 2010:778-792. |
| 7 | KEHL W, MANHARDT F, TOMBARI F, et al. SSD-6D: making RGB-based 3D detection and 6D pose estimation great again[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway:IEEE, 2017: 1530-1538. |
| 8 | HE Y, HUANG H, FAN H, et al. FFB6D: a full flow bidirectional fusion network for 6D pose estimation[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE, 2021: 3002-3012. |
| 9 | BUKSCHAT Y, VETTER M. EfficientPose: an efficient, accurate and scalable end-to-end 6D multi object pose estimation approach[EB/OL]. (2020-11-18)[2023-06-08].. |
| 10 | XU Y, LIN K-Y, ZHANG G, et al. RNNPose: recurrent 6-DoF object pose refinement with robust correspondence field estimation and pose optimization [C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE, 2022: 14860-14870. |
| 11 | PENG S, ZHOU X, LIU Y, et al. PVNet: pixel-wise voting network for 6DoF object pose estimation[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2022, 44(6): 3212-3223. |
| 12 | 帅昊.基于深度学习的机械产品AR跟踪注册方法研究[D].重庆:重庆邮电大学, 2021:37-38. |
| SHUAI H. Research on tracking registration of mechanical product assembly augmented reality based on deep learning[D].Chongqing: Chongqing University of Posts and Telecommunications, 2021:37-38. | |
| 13 | RAD M, LEPETIT V. BB8: a scalable, accurate, robust to partial occlusion method for predicting the 3D poses of challenging objects without using depth [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway:IEEE,2017: 3848-3856. |
| 14 | 马康哲,皮家甜,熊周兵,等.融合注意力特征的遮挡物体6D姿态估计[J].计算机应用,2022,42(12):3715-3722. |
| MA K Z, PI J T, XIONG Z B, et al. 6D pose estimation incorporating attentional features for occluded objects[J]. Journal of Computer Applications, 2022, 42(12): 3715-3722. | |
| 15 | YANG Z X, YU X, YANG Y. DSC-PoseNet: learning 6DoF object pose estimation via dual-scale consistency[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE, 2021: 3906-3915. |
| 16 | HAASE D, AMTHOR M. Rethinking depthwise separable convolutions: how intra-kernel correlations lead to improved mobilenets[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE,2020:14588-14597. |
| 17 | ZHAO Z, PENG G, WANG H, et al. Estimating 6D pose from localizing designated surface keypoints [EB/OL]. (2018-12-04)[2023-06-08]. . |
| 18 | HINTERSTOISSER S, LEPETIT V, ILIC S, et al. Model based training, detection and pose estimation of texture-less 3D objects in heavily cluttered scenes[C]// Proceedings of the 11th Asian Conference on Computer Vision. Berlin:Springer, 2013: 548-562. |
| 19 | TEKIN B, SINHA S N, FUA P. Real-time seamless single shot 6D object pose prediction [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 292-301. |
| 20 | XIANG Y, SCHMIDT T, NARAYANAN V, et al. PoseCNN: a convolution neural network for 6D object pose estimation in cluttered scenes [EB/OL]. (2018-05-26)[2023-06-08] . |
| 21 | WANG C, XU D, ZHU Y, et al. DenseFusion: 6D object pose estimation by iterative dense fusion[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 3338-3347. |
| 22 | LI Q, HU R, XIAO J, et al. Learning latent geometric consistency for 6D object pose estimation in heavily cluttered scenes[J]. Journal of Visual Communication and Image Representation, 2020, 70: 175-184. |
| 23 | SONG C, SONG J, HUANG Q. HybridPose: 6D object pose estimation under hybrid representations[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 428-437. |
| 24 | HU Y, FUA P, WANG W,et al. Single-stage 6D object pose estimations[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway:IEEE,2020:2927-2936. |
| 25 | IWASE S, LIU X, KHIRODKAR R, et al. RePOSE: fast 6D object pose refinement via deep texture rendering[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 3283-3292. |
| 26 | HU Y, HUGONOT J, FUA P,et al. Segmentation-driven 6D object pose estimation [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 3380-3389. |
| [1] | Shunyong LI, Shiyi LI, Rui XU, Xingwang ZHAO. Incomplete multi-view clustering algorithm based on self-attention fusion [J]. Journal of Computer Applications, 2024, 44(9): 2696-2703. |
| [2] | Yunchuan HUANG, Yongquan JIANG, Juntao HUANG, Yan YANG. Molecular toxicity prediction based on meta graph isomorphism network [J]. Journal of Computer Applications, 2024, 44(9): 2964-2969. |
| [3] | Yexin PAN, Zhe YANG. Optimization model for small object detection based on multi-level feature bidirectional fusion [J]. Journal of Computer Applications, 2024, 44(9): 2871-2877. |
| [4] | Zhiqiang ZHAO, Peihong MA, Xinhong HEI. Crowd counting method based on dual attention mechanism [J]. Journal of Computer Applications, 2024, 44(9): 2886-2892. |
| [5] | Jing QIN, Zhiguang QIN, Fali LI, Yueheng PENG. Diagnosis of major depressive disorder based on probabilistic sparse self-attention neural network [J]. Journal of Computer Applications, 2024, 44(9): 2970-2974. |
| [6] | Xiyuan WANG, Zhancheng ZHANG, Shaokang XU, Baocheng ZHANG, Xiaoqing LUO, Fuyuan HU. Unsupervised cross-domain transfer network for 3D/2D registration in surgical navigation [J]. Journal of Computer Applications, 2024, 44(9): 2911-2918. |
| [7] | Liting LI, Bei HUA, Ruozhou HE, Kuang XU. Multivariate time series prediction model based on decoupled attention mechanism [J]. Journal of Computer Applications, 2024, 44(9): 2732-2738. |
| [8] | Kaipeng XUE, Tao XU, Chunjie LIAO. Multimodal sentiment analysis network with self-supervision and multi-layer cross attention [J]. Journal of Computer Applications, 2024, 44(8): 2387-2392. |
| [9] | Pengqi GAO, Heming HUANG, Yonghong FAN. Fusion of coordinate and multi-head attention mechanisms for interactive speech emotion recognition [J]. Journal of Computer Applications, 2024, 44(8): 2400-2406. |
| [10] | Yuhan LIU, Genlin JI, Hongping ZHANG. Video pedestrian anomaly detection method based on skeleton graph and mixed attention [J]. Journal of Computer Applications, 2024, 44(8): 2551-2557. |
| [11] | Zhonghua LI, Yunqi BAI, Xuejin WANG, Leilei HUANG, Chujun LIN, Shiyu LIAO. Low illumination face detection based on image enhancement [J]. Journal of Computer Applications, 2024, 44(8): 2588-2594. |
| [12] | Shangbin MO, Wenjun WANG, Ling DONG, Shengxiang GAO, Zhengtao YU. Single-channel speech enhancement based on multi-channel information aggregation and collaborative decoding [J]. Journal of Computer Applications, 2024, 44(8): 2611-2617. |
| [13] | Yanjie GU, Yingjun ZHANG, Xiaoqian LIU, Wei ZHOU, Wei SUN. Traffic flow forecasting via spatial-temporal multi-graph fusion [J]. Journal of Computer Applications, 2024, 44(8): 2618-2625. |
| [14] | Qianhong SHI, Yan YANG, Yongquan JIANG, Xiaocao OUYANG, Wubo FAN, Qiang CHEN, Tao JIANG, Yuan LI. Multi-granularity abrupt change fitting network for air quality prediction [J]. Journal of Computer Applications, 2024, 44(8): 2643-2650. |
| [15] | Yiqun ZHAO, Zhiyu ZHANG, Xue DONG. Anisotropic travel time computation method based on dense residual connection physical information neural networks [J]. Journal of Computer Applications, 2024, 44(7): 2310-2318. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||