


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (3): 937-945.DOI: 10.11772/j.issn.1001-9081.2024020242
• Advanced computing • Previous Articles Next Articles
Suqian WU1, Jianguo YAN2, Bin YANG2, Tao QIN1, Ying LIU3, Jing YANG1,4( )
)
Received:2024-03-08
Revised:2024-04-08
Accepted:2024-04-15
Online:2024-06-04
Published:2025-03-10
Contact:
Jing YANG
About author:WU Suqian, born in 1997, M. S. candidate. His research interests include intelligent algorithm, wireless sensor network localization.Supported by:
吴素谦1, 闫建国2, 杨斌2, 覃涛1, 刘影3, 杨靖1,4()
通讯作者:
杨靖
作者简介:吴素谦(1997—),男,湖北黄冈人,硕士研究生,主要研究方向:智能算法、无线传感网络定位基金资助:CLC Number:
Suqian WU, Jianguo YAN, Bin YANG, Tao QIN, Ying LIU, Jing YANG. Multi-strategy improved Aquila optimizer and its application in path planning[J]. Journal of Computer Applications, 2025, 45(3): 937-945.
吴素谦, 闫建国, 杨斌, 覃涛, 刘影, 杨靖. 多策略改进的天鹰优化器及其在路径规划中的应用[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 937-945.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024020242
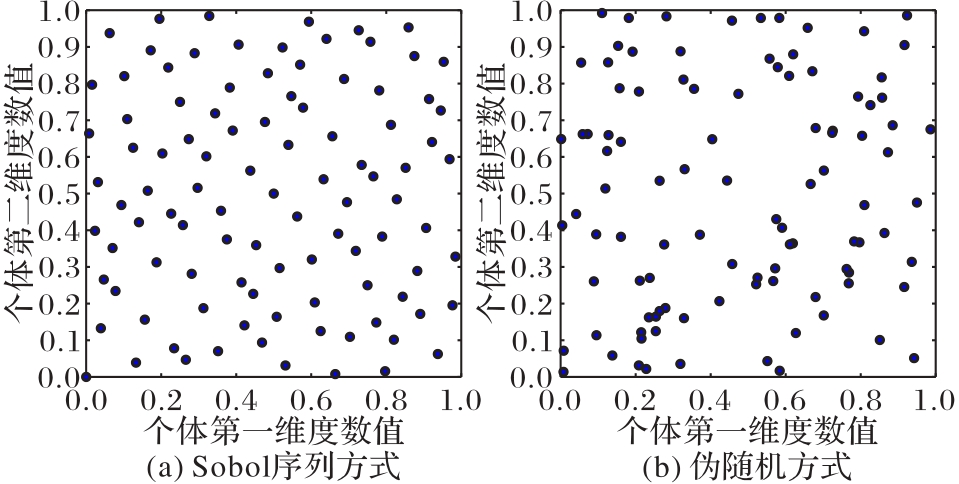
Fig. 1 Population initialization distribution diagrams
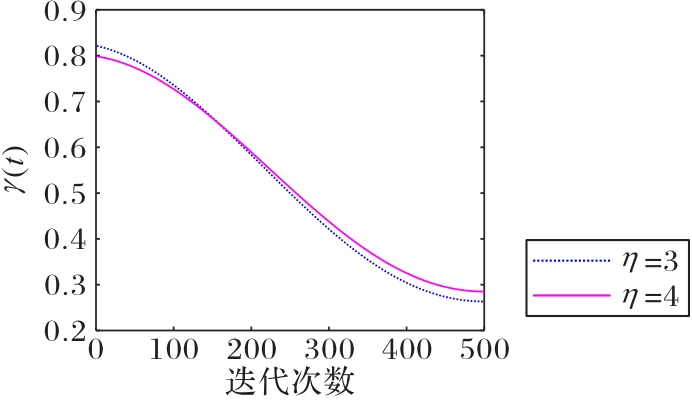
Fig. 2 Non-linear balance factor function curves
| 函数 | 名称 | 维数 | 范围 | 类型 | 最优值 |
|---|---|---|---|---|---|
| f1 | Sphere | 30 | [-100,100] | 单峰 | 0 |
| f2 | Schwefel 2.22 | 30 | [-10,10] | 单峰 | 0 |
| f3 | Schwefel 1.2 | 30 | [-100,100] | 单峰 | 0 |
| f4 | Rosenbrock | 30 | [-30,30] | 单峰 | 0 |
| f5 | Step | 30 | [-100,100] | 单峰 | 0 |
| f6 | Quartic | 30 | [1.28,1.28] | 单峰 | 0 |
| f7 | Schwefel 2.26 | 30 | [-500,500] | 多峰 | -12 569.5 |
| f8 | Ackley | 30 | [-32,32] | 多峰 | 0 |
| f9 | Penalized 1 | 30 | [-50,50] | 多峰 | 0 |
| f10 | Penalized 2 | 30 | [-50,50] | 多峰 | 0 |
| f11 | Kowalik’s | 4 | [-5,5] | 固定维 | 0.000 30 |
| f12 | Hatman’s 2 | 6 | [0,1] | 固定维 | -3.32 |
Tab. 1 Benchmark functions
| 函数 | 名称 | 维数 | 范围 | 类型 | 最优值 |
|---|---|---|---|---|---|
| f1 | Sphere | 30 | [-100,100] | 单峰 | 0 |
| f2 | Schwefel 2.22 | 30 | [-10,10] | 单峰 | 0 |
| f3 | Schwefel 1.2 | 30 | [-100,100] | 单峰 | 0 |
| f4 | Rosenbrock | 30 | [-30,30] | 单峰 | 0 |
| f5 | Step | 30 | [-100,100] | 单峰 | 0 |
| f6 | Quartic | 30 | [1.28,1.28] | 单峰 | 0 |
| f7 | Schwefel 2.26 | 30 | [-500,500] | 多峰 | -12 569.5 |
| f8 | Ackley | 30 | [-32,32] | 多峰 | 0 |
| f9 | Penalized 1 | 30 | [-50,50] | 多峰 | 0 |
| f10 | Penalized 2 | 30 | [-50,50] | 多峰 | 0 |
| f11 | Kowalik’s | 4 | [-5,5] | 固定维 | 0.000 30 |
| f12 | Hatman’s 2 | 6 | [0,1] | 固定维 | -3.32 |
| 函数 | 指标 | MSIAO | AO | GWO | BOA | PSO | CSSOA | SAO | IAO |
|---|---|---|---|---|---|---|---|---|---|
| f1 | 最优值 | 0.000E+00 | 1.745E-157 | 9.167E-29 | 2.400E-10 | 2.295E-05 | 1.359E-139 | 0.000E+00 | 8.560E-260 |
| 平均值 | 0.000E+00 | 1.058E-99 | 1.607E-27 | 3.014E-10 | 7.496E-04 | 1.879E-19 | 6.674E-276 | 6.450E-221 | |
| 标准差 | 0.000E+00 | 5.788E-99 | 1.854E-27 | 3.736E-11 | 9.566E-04 | 4.825E-19 | 0.000E+00 | 0.000E+00 | |
| f2 | 最优值 | 7.401E-217 | 2.600E-79 | 2.939E-17 | 2.863E-08 | 7.508E-03 | 6.849E-100 | 1.123E-166 | 1.244E-126 |
| 平均值 | 1.094E-206 | 3.677E-60 | 8.770E-17 | 8.105E-08 | 6.555E-02 | 1.373E-08 | 1.300E-126 | 2.267E-113 | |
| 标准差 | 0.000E+00 | 2.014E-59 | 6.268E-17 | 2.096E-08 | 4.986E-02 | 5.971E-08 | 7.120E-126 | 9.481E-113 | |
| f3 | 最优值 | 0.000E+00 | 1.058E-155 | 3.314E-08 | 1.595E-10 | 8.783E+00 | 6.016E-135 | 0.000E+000 | 7.071E-258 |
| 平均值 | 0.000E+00 | 2.688E-107 | 2.771E-05 | 2.291E-10 | 1.237E+03 | 4.463E-15 | 3.366E-262 | 1.061E-217 | |
| 标准差 | 0.000E+00 | 1.468E-106 | 1.093E-04 | 3.912E-11 | 2.264E+03 | 2.333E-14 | 0.000E+000 | 0.000E+000 | |
| f4 | 最优值 | 8.183E-13 | 3.358E-05 | 2.569E+01 | 2.883E+01 | 2.103E+01 | 0.000E+00 | 4.527E-04 | 5.636E-10 |
| 平均值 | 5.489E-08 | 2.808E-03 | 2.719E+01 | 2.889E+01 | 4.345E+01 | 2.186E-05 | 3.884E-02 | 1.549E-05 | |
| 标准差 | 2.878E-07 | 3.077E-03 | 8.036E-01 | 2.877E-02 | 2.422E+01 | 7.599E-05 | 4.258E-02 | 4.055E-05 | |
| f5 | 最优值 | 3.103E-15 | 3.453E-09 | 9.928E-05 | 3.648E+00 | 3.157E-05 | 0.000E+00 | 1.429E-06 | 8.312E-13 |
| 平均值 | 8.723E-12 | 6.204E-05 | 8.169E-01 | 5.103E+00 | 1.682E-03 | 2.902E-07 | 7.961E-04 | 2.700E-08 | |
| 标准差 | 1.669E-11 | 8.227E-05 | 3.930E-01 | 7.030E-01 | 1.987E-03 | 9.327E-07 | 1.896E-03 | 5.496E-08 | |
| f6 | 最优值 | 1.821E-07 | 1.981E-06 | 2.641E-04 | 8.005E-04 | 1.244E-02 | 3.936E-06 | 1.290E-06 | 5.007E-07 |
| 平均值 | 8.419E-05 | 1.915E-03 | 2.440E-03 | 4.211E-02 | 2.496E-04 | 9.886E-05 | 1.016E-04 | 5.891E-05 | |
| 标准差 | 8.687E-04 | 9.984E-04 | 1.829E-02 | 2.265E-04 | 9.522E-05 | 9.413E-05 | 1.821E-07 | 1.981E-06 | |
| f7 | 最优值 | -12569.487 | -12 568.584 | -7 404.944 | -4 963.215 | -3 849.552 | -13 208.614 | -12 565.109 | -12 569.487 |
| 平均值 | -12569.484 | -7 825.292 | -5 779.583 | -4 096.094 | -2 838.770 | -10 420.112 | -7 687.969 | -12 451.034 | |
| 标准差 | 1.411E-02 | 3.815E+03 | 1.111E+03 | 3.392E+02 | 4.392E+02 | 1.672E+03 | 3.714E+03 | 6.487E+02 | |
| f8 | 最优值 | 8.882E-16 | 8.882E-16 | 6.839E-14 | 5.492E-08 | 6.322E-04 | 8.882E-16 | 8.882E-16 | 8.882E-16 |
| 平均值 | 8.882E-16 | 7.581E-11 | 9.918E-14 | 9.350E-08 | 3.835E-01 | 2.575E-12 | 8.882E-16 | 8.882E-16 | |
| 标准差 | 0.000E+00 | 3.731E-10 | 1.628E-14 | 2.259E-08 | 6.103E-01 | 1.208E-11 | 0.000E+00 | 0.000E+00 | |
| f9 | 最优值 | 1.170E-15 | 2.649E-09 | 9.194E-03 | 2.423E-01 | 4.009E-03 | 1.571E-32 | 3.458E-08 | 3.010E-13 |
| 平均值 | 6.779E-13 | 1.723E-06 | 4.010E-02 | 4.301E-01 | 1.262E+00 | 1.305E-09 | 5.809E-02 | 2.505E-09 | |
| 标准差 | 1.385E-12 | 2.153E-06 | 1.939E-02 | 1.216E-01 | 9.749E-01 | 4.890E-09 | 3.045E-01 | 6.025E-09 | |
| f10 | 最优值 | 2.044E-15 | 5.948E-08 | 1.018E-01 | 1.971E+00 | 1.883E-06 | 1.350E-32 | 8.063E-08 | 2.437E-12 |
| 平均值 | 1.396E-11 | 2.447E-05 | 6.693E-01 | 2.640E+00 | 6.661E-03 | 1.031E-07 | 1.335E-04 | 4.575E-08 | |
| 标准差 | 4.389E-11 | 3.510E-05 | 2.767E-01 | 2.950E-01 | 2.028E-02 | 2.360E-07 | 2.343E-04 | 9.599E-08 | |
| f11 | 最优值 | 3.075E-04 | 3.293E-04 | 3.075E-04 | 3.209E-04 | 3.075E-04 | 3.270E-04 | 4.422E-04 | 3.419E-04 |
| 平均值 | 3.110E-04 | 4.860E-04 | 1.765E-03 | 3.789E-04 | 6.293E-04 | 5.159E-04 | 1.254E-03 | 4.730E-04 | |
| 标准差 | 9.463E-06 | 1.189E-04 | 5.061E-03 | 4.240E-05 | 5.470E-04 | 1.284E-04 | 8.233E-04 | 8.437E-05 | |
| f12 | 最优值 | -3.322E+00 | -3.305E+00 | -3.322E+00 | -3.301E+00 | -3.275E+00 | -3.152E+00 | -2.983E+00 | -3.288E+00 |
| 平均值 | -3.322E+00 | -3.171E+00 | -3.269E+00 | -3.103E+00 | -2.998E+00 | -2.536E+00 | -2.320E+00 | -3.163E+00 | |
| 标准差 | 7.420E-06 | 7.102E-02 | 6.789E-02 | 1.116E-01 | 2.348E-01 | 5.044E-01 | 2.911E-01 | 8.979E-02 |
Tab. 2 Comparison of optimization results of different swarm intelligence algorithms
| 函数 | 指标 | MSIAO | AO | GWO | BOA | PSO | CSSOA | SAO | IAO |
|---|---|---|---|---|---|---|---|---|---|
| f1 | 最优值 | 0.000E+00 | 1.745E-157 | 9.167E-29 | 2.400E-10 | 2.295E-05 | 1.359E-139 | 0.000E+00 | 8.560E-260 |
| 平均值 | 0.000E+00 | 1.058E-99 | 1.607E-27 | 3.014E-10 | 7.496E-04 | 1.879E-19 | 6.674E-276 | 6.450E-221 | |
| 标准差 | 0.000E+00 | 5.788E-99 | 1.854E-27 | 3.736E-11 | 9.566E-04 | 4.825E-19 | 0.000E+00 | 0.000E+00 | |
| f2 | 最优值 | 7.401E-217 | 2.600E-79 | 2.939E-17 | 2.863E-08 | 7.508E-03 | 6.849E-100 | 1.123E-166 | 1.244E-126 |
| 平均值 | 1.094E-206 | 3.677E-60 | 8.770E-17 | 8.105E-08 | 6.555E-02 | 1.373E-08 | 1.300E-126 | 2.267E-113 | |
| 标准差 | 0.000E+00 | 2.014E-59 | 6.268E-17 | 2.096E-08 | 4.986E-02 | 5.971E-08 | 7.120E-126 | 9.481E-113 | |
| f3 | 最优值 | 0.000E+00 | 1.058E-155 | 3.314E-08 | 1.595E-10 | 8.783E+00 | 6.016E-135 | 0.000E+000 | 7.071E-258 |
| 平均值 | 0.000E+00 | 2.688E-107 | 2.771E-05 | 2.291E-10 | 1.237E+03 | 4.463E-15 | 3.366E-262 | 1.061E-217 | |
| 标准差 | 0.000E+00 | 1.468E-106 | 1.093E-04 | 3.912E-11 | 2.264E+03 | 2.333E-14 | 0.000E+000 | 0.000E+000 | |
| f4 | 最优值 | 8.183E-13 | 3.358E-05 | 2.569E+01 | 2.883E+01 | 2.103E+01 | 0.000E+00 | 4.527E-04 | 5.636E-10 |
| 平均值 | 5.489E-08 | 2.808E-03 | 2.719E+01 | 2.889E+01 | 4.345E+01 | 2.186E-05 | 3.884E-02 | 1.549E-05 | |
| 标准差 | 2.878E-07 | 3.077E-03 | 8.036E-01 | 2.877E-02 | 2.422E+01 | 7.599E-05 | 4.258E-02 | 4.055E-05 | |
| f5 | 最优值 | 3.103E-15 | 3.453E-09 | 9.928E-05 | 3.648E+00 | 3.157E-05 | 0.000E+00 | 1.429E-06 | 8.312E-13 |
| 平均值 | 8.723E-12 | 6.204E-05 | 8.169E-01 | 5.103E+00 | 1.682E-03 | 2.902E-07 | 7.961E-04 | 2.700E-08 | |
| 标准差 | 1.669E-11 | 8.227E-05 | 3.930E-01 | 7.030E-01 | 1.987E-03 | 9.327E-07 | 1.896E-03 | 5.496E-08 | |
| f6 | 最优值 | 1.821E-07 | 1.981E-06 | 2.641E-04 | 8.005E-04 | 1.244E-02 | 3.936E-06 | 1.290E-06 | 5.007E-07 |
| 平均值 | 8.419E-05 | 1.915E-03 | 2.440E-03 | 4.211E-02 | 2.496E-04 | 9.886E-05 | 1.016E-04 | 5.891E-05 | |
| 标准差 | 8.687E-04 | 9.984E-04 | 1.829E-02 | 2.265E-04 | 9.522E-05 | 9.413E-05 | 1.821E-07 | 1.981E-06 | |
| f7 | 最优值 | -12569.487 | -12 568.584 | -7 404.944 | -4 963.215 | -3 849.552 | -13 208.614 | -12 565.109 | -12 569.487 |
| 平均值 | -12569.484 | -7 825.292 | -5 779.583 | -4 096.094 | -2 838.770 | -10 420.112 | -7 687.969 | -12 451.034 | |
| 标准差 | 1.411E-02 | 3.815E+03 | 1.111E+03 | 3.392E+02 | 4.392E+02 | 1.672E+03 | 3.714E+03 | 6.487E+02 | |
| f8 | 最优值 | 8.882E-16 | 8.882E-16 | 6.839E-14 | 5.492E-08 | 6.322E-04 | 8.882E-16 | 8.882E-16 | 8.882E-16 |
| 平均值 | 8.882E-16 | 7.581E-11 | 9.918E-14 | 9.350E-08 | 3.835E-01 | 2.575E-12 | 8.882E-16 | 8.882E-16 | |
| 标准差 | 0.000E+00 | 3.731E-10 | 1.628E-14 | 2.259E-08 | 6.103E-01 | 1.208E-11 | 0.000E+00 | 0.000E+00 | |
| f9 | 最优值 | 1.170E-15 | 2.649E-09 | 9.194E-03 | 2.423E-01 | 4.009E-03 | 1.571E-32 | 3.458E-08 | 3.010E-13 |
| 平均值 | 6.779E-13 | 1.723E-06 | 4.010E-02 | 4.301E-01 | 1.262E+00 | 1.305E-09 | 5.809E-02 | 2.505E-09 | |
| 标准差 | 1.385E-12 | 2.153E-06 | 1.939E-02 | 1.216E-01 | 9.749E-01 | 4.890E-09 | 3.045E-01 | 6.025E-09 | |
| f10 | 最优值 | 2.044E-15 | 5.948E-08 | 1.018E-01 | 1.971E+00 | 1.883E-06 | 1.350E-32 | 8.063E-08 | 2.437E-12 |
| 平均值 | 1.396E-11 | 2.447E-05 | 6.693E-01 | 2.640E+00 | 6.661E-03 | 1.031E-07 | 1.335E-04 | 4.575E-08 | |
| 标准差 | 4.389E-11 | 3.510E-05 | 2.767E-01 | 2.950E-01 | 2.028E-02 | 2.360E-07 | 2.343E-04 | 9.599E-08 | |
| f11 | 最优值 | 3.075E-04 | 3.293E-04 | 3.075E-04 | 3.209E-04 | 3.075E-04 | 3.270E-04 | 4.422E-04 | 3.419E-04 |
| 平均值 | 3.110E-04 | 4.860E-04 | 1.765E-03 | 3.789E-04 | 6.293E-04 | 5.159E-04 | 1.254E-03 | 4.730E-04 | |
| 标准差 | 9.463E-06 | 1.189E-04 | 5.061E-03 | 4.240E-05 | 5.470E-04 | 1.284E-04 | 8.233E-04 | 8.437E-05 | |
| f12 | 最优值 | -3.322E+00 | -3.305E+00 | -3.322E+00 | -3.301E+00 | -3.275E+00 | -3.152E+00 | -2.983E+00 | -3.288E+00 |
| 平均值 | -3.322E+00 | -3.171E+00 | -3.269E+00 | -3.103E+00 | -2.998E+00 | -2.536E+00 | -2.320E+00 | -3.163E+00 | |
| 标准差 | 7.420E-06 | 7.102E-02 | 6.789E-02 | 1.116E-01 | 2.348E-01 | 5.044E-01 | 2.911E-01 | 8.979E-02 |

Fig. 3 Function convergence curves
| 函数 | MSIAO vs AO | MSIAO vs GWO | MSIAO vs BOA | MSIAO vs PSO | MSIAO vs CSSOA | MSIAO vs SAO | MSIAO vs IAO |
|---|---|---|---|---|---|---|---|
| +/-/= | 11/0/1 | 12/0/0 | 12/0/0 | 11/0/1 | 11/0/1 | 10/0/2 | 11/0/1 |
| f1 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 5.61E-06(+) | 1.73E-06(+) |
| f2 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) |
| f3 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 2.56E-06(+) | 1.73E-06(+) |
| f4 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.41E-02(+) | 1.73E-06(+) | 4.29E-06(+) |
| f5 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.17E-02(+) | 1.73E-06(+) | 1.73E-06(+) |
| f6 | 7.27E-03(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.29E-03(+) | 7.50E-01(=) | 2.54E-02(+) |
| f7 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 6.34E-06(+) | 1.73E-06(+) | 1.92E-06(+) |
| f8 | NaN(=) | 1.64E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 3.91E-03(+) | NaN(=) | NaN(=) |
| f9 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 2.13E-01(=) | 1.73E-06(+) | 1.73E-06(+) |
| f10 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 7.27E-03(+) | 1.73E-06(+) | 2.13E-06(+) |
| f11 | 1.73E-06(+) | 4.73E-06(+) | 1.73E-06(+) | 1.02E-01(=) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) |
| f12 | 1.73E-06(+) | 5.75E-06(+) | 1.73E-06(+) | 1.92E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 2.88E-06(+) |
Tab. 3 Results of Wilcoxon rank-sum test for each algorithm
| 函数 | MSIAO vs AO | MSIAO vs GWO | MSIAO vs BOA | MSIAO vs PSO | MSIAO vs CSSOA | MSIAO vs SAO | MSIAO vs IAO |
|---|---|---|---|---|---|---|---|
| +/-/= | 11/0/1 | 12/0/0 | 12/0/0 | 11/0/1 | 11/0/1 | 10/0/2 | 11/0/1 |
| f1 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 5.61E-06(+) | 1.73E-06(+) |
| f2 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) |
| f3 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 2.56E-06(+) | 1.73E-06(+) |
| f4 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.41E-02(+) | 1.73E-06(+) | 4.29E-06(+) |
| f5 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.17E-02(+) | 1.73E-06(+) | 1.73E-06(+) |
| f6 | 7.27E-03(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.29E-03(+) | 7.50E-01(=) | 2.54E-02(+) |
| f7 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 6.34E-06(+) | 1.73E-06(+) | 1.92E-06(+) |
| f8 | NaN(=) | 1.64E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 3.91E-03(+) | NaN(=) | NaN(=) |
| f9 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 2.13E-01(=) | 1.73E-06(+) | 1.73E-06(+) |
| f10 | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 7.27E-03(+) | 1.73E-06(+) | 2.13E-06(+) |
| f11 | 1.73E-06(+) | 4.73E-06(+) | 1.73E-06(+) | 1.02E-01(=) | 1.73E-06(+) | 1.73E-06(+) | 1.73E-06(+) |
| f12 | 1.73E-06(+) | 5.75E-06(+) | 1.73E-06(+) | 1.92E-06(+) | 1.73E-06(+) | 1.73E-06(+) | 2.88E-06(+) |
| 函数 | 维数 | 特征 | 范围 | 最优值 |
|---|---|---|---|---|
| CEC01 | 10 | MF | [-100,100] | 400 |
| CEC02 | 10 | MF | [-100,100] | 500 |
| CEC03 | 10 | HF | [-100,100] | 1 100 |
| CEC04 | 10 | HF | [-100,100] | 1 400 |
| CEC05 | 10 | HF | [-100,100] | 1 600 |
| CEC06 | 10 | HF | [-100,100] | 1 700 |
| CEC07 | 10 | CF | [-100,100] | 2 100 |
| CEC08 | 10 | CF | [-100,100] | 2 200 |
| CEC09 | 10 | CF | [-100,100] | 2 600 |
| CEC10 | 10 | CF | [-100,100] | 2 900 |
Tab. 4 CEC2017 test functions
| 函数 | 维数 | 特征 | 范围 | 最优值 |
|---|---|---|---|---|
| CEC01 | 10 | MF | [-100,100] | 400 |
| CEC02 | 10 | MF | [-100,100] | 500 |
| CEC03 | 10 | HF | [-100,100] | 1 100 |
| CEC04 | 10 | HF | [-100,100] | 1 400 |
| CEC05 | 10 | HF | [-100,100] | 1 600 |
| CEC06 | 10 | HF | [-100,100] | 1 700 |
| CEC07 | 10 | CF | [-100,100] | 2 100 |
| CEC08 | 10 | CF | [-100,100] | 2 200 |
| CEC09 | 10 | CF | [-100,100] | 2 600 |
| CEC10 | 10 | CF | [-100,100] | 2 900 |
| 函数 | 指标 | MSIAO | AO | GWO | BOA | PSO | CSSOA | SAO | IAO |
|---|---|---|---|---|---|---|---|---|---|
| CEC01 | 平均值 | 4.185E+02 | 4.294E+02 | 4.419E+02 | 2.527E+03 | 5.231E+02 | 1.634E+03 | 5.358E+02 | 4.273E+02 |
| 标准差 | 2.386E+01 | 3.211E+01 | 3.344E+01 | 1.143E+03 | 5.612E+01 | 7.712E+02 | 1.654E+02 | 4.036E+01 | |
| CEC02 | 平均值 | 5.305E+02 | 5.335E+02 | 5.363E+02 | 6.565E+02 | 5.973E+02 | 6.033E+02 | 5.704E+02 | 5.328E+02 |
| 标准差 | 8.962E+00 | 1.023E+01 | 1.402E+01 | 2.697E+01 | 2.587E+01 | 2.131E+01 | 8.212E+00 | 9.707E+00 | |
| CEC03 | 平均值 | 1.138E+03 | 1.293E+03 | 1.203E+03 | 1.931E+04 | 6.197E+03 | 4.888E+03 | 1.793E+03 | 1.154E+03 |
| 标准差 | 4.764E+01 | 6.900E+01 | 8.111E+01 | 1.869E+04 | 7.419E+03 | 9.585E+03 | 1.296E+03 | 5.594E+01 | |
| CEC04 | 平均值 | 1.860E+03 | 2.876E+03 | 3.163E+03 | 9.885E+05 | 1.013E+04 | 6.320E+03 | 3.303E+03 | 2.048E+03 |
| 标准差 | 6.635E+02 | 1.608E+03 | 1.836E+03 | 1.920E+06 | 7.264E+03 | 5.898E+03 | 1.809E+03 | 9.533E+02 | |
| CEC05 | 平均值 | 1.781E+03 | 1.838E+03 | 1.787E+03 | 2.700E+03 | 2.051E+03 | 2.206E+03 | 1.954E+03 | 1.784E+03 |
| 标准差 | 9.803E+01 | 1.392E+02 | 1.364E+02 | 2.448E+02 | 1.651E+02 | 1.733E+02 | 9.791E+01 | 1.287E+02 | |
| CEC06 | 平均值 | 1.768E+03 | 1.783E+03 | 1.783E+03 | 2.278E+03 | 1.852E+03 | 1.912E+03 | 1.819E+03 | 1.776E+03 |
| 标准差 | 2.488E+01 | 3.068E+01 | 4.782E+01 | 2.166E+02 | 9.432E+01 | 1.049E+02 | 3.128E+01 | 2.972E+01 | |
| CEC07 | 平均值 | 2.209E+03 | 2.303E+03 | 2.306E+03 | 2.448E+03 | 2.389E+03 | 2.400E+03 | 2.352E+03 | 2.300E+03 |
| 标准差 | 7.605E+00 | 4.737E+01 | 4.870E+01 | 2.920E+01 | 4.832E+01 | 2.713E+01 | 4.044E+01 | 5.319E+01 | |
| CEC08 | 平均值 | 2.306E+03 | 2.314E+03 | 2.378E+03 | 4.112E+03 | 2.584E+03 | 3.134E+03 | 2.438E+03 | 2.313E+03 |
| 标准差 | 1.905E+01 | 1.169E+01 | 7.088E+01 | 5.681E+02 | 1.988E+02 | 3.271E+02 | 6.510E+01 | 1.137E+01 | |
| CEC09 | 平均值 | 2.988E+03 | 3.046E+03 | 3.191E+03 | 5.099E+03 | 3.926E+03 | 4.048E+03 | 3.396E+03 | 3.006E+03 |
| 标准差 | 1.458E+02 | 1.900E+02 | 2.555E+02 | 4.286E+02 | 4.762E+02 | 5.025E+02 | 1.626E+02 | 1.663E+02 | |
| CEC10 | 平均值 | 3.202E+03 | 3.278E+03 | 3.211E+03 | 3.873E+03 | 3.409E+03 | 3.555E+03 | 3.347E+03 | 3.247E+03 |
| 标准差 | 2.911E+01 | 8.187E+01 | 4.092E+01 | 2.340E+02 | 1.140E+02 | 1.620E+02 | 4.825E+01 | 5.346E+01 |
Tab. 5 Comparison of CEC2017 test function optimization results
| 函数 | 指标 | MSIAO | AO | GWO | BOA | PSO | CSSOA | SAO | IAO |
|---|---|---|---|---|---|---|---|---|---|
| CEC01 | 平均值 | 4.185E+02 | 4.294E+02 | 4.419E+02 | 2.527E+03 | 5.231E+02 | 1.634E+03 | 5.358E+02 | 4.273E+02 |
| 标准差 | 2.386E+01 | 3.211E+01 | 3.344E+01 | 1.143E+03 | 5.612E+01 | 7.712E+02 | 1.654E+02 | 4.036E+01 | |
| CEC02 | 平均值 | 5.305E+02 | 5.335E+02 | 5.363E+02 | 6.565E+02 | 5.973E+02 | 6.033E+02 | 5.704E+02 | 5.328E+02 |
| 标准差 | 8.962E+00 | 1.023E+01 | 1.402E+01 | 2.697E+01 | 2.587E+01 | 2.131E+01 | 8.212E+00 | 9.707E+00 | |
| CEC03 | 平均值 | 1.138E+03 | 1.293E+03 | 1.203E+03 | 1.931E+04 | 6.197E+03 | 4.888E+03 | 1.793E+03 | 1.154E+03 |
| 标准差 | 4.764E+01 | 6.900E+01 | 8.111E+01 | 1.869E+04 | 7.419E+03 | 9.585E+03 | 1.296E+03 | 5.594E+01 | |
| CEC04 | 平均值 | 1.860E+03 | 2.876E+03 | 3.163E+03 | 9.885E+05 | 1.013E+04 | 6.320E+03 | 3.303E+03 | 2.048E+03 |
| 标准差 | 6.635E+02 | 1.608E+03 | 1.836E+03 | 1.920E+06 | 7.264E+03 | 5.898E+03 | 1.809E+03 | 9.533E+02 | |
| CEC05 | 平均值 | 1.781E+03 | 1.838E+03 | 1.787E+03 | 2.700E+03 | 2.051E+03 | 2.206E+03 | 1.954E+03 | 1.784E+03 |
| 标准差 | 9.803E+01 | 1.392E+02 | 1.364E+02 | 2.448E+02 | 1.651E+02 | 1.733E+02 | 9.791E+01 | 1.287E+02 | |
| CEC06 | 平均值 | 1.768E+03 | 1.783E+03 | 1.783E+03 | 2.278E+03 | 1.852E+03 | 1.912E+03 | 1.819E+03 | 1.776E+03 |
| 标准差 | 2.488E+01 | 3.068E+01 | 4.782E+01 | 2.166E+02 | 9.432E+01 | 1.049E+02 | 3.128E+01 | 2.972E+01 | |
| CEC07 | 平均值 | 2.209E+03 | 2.303E+03 | 2.306E+03 | 2.448E+03 | 2.389E+03 | 2.400E+03 | 2.352E+03 | 2.300E+03 |
| 标准差 | 7.605E+00 | 4.737E+01 | 4.870E+01 | 2.920E+01 | 4.832E+01 | 2.713E+01 | 4.044E+01 | 5.319E+01 | |
| CEC08 | 平均值 | 2.306E+03 | 2.314E+03 | 2.378E+03 | 4.112E+03 | 2.584E+03 | 3.134E+03 | 2.438E+03 | 2.313E+03 |
| 标准差 | 1.905E+01 | 1.169E+01 | 7.088E+01 | 5.681E+02 | 1.988E+02 | 3.271E+02 | 6.510E+01 | 1.137E+01 | |
| CEC09 | 平均值 | 2.988E+03 | 3.046E+03 | 3.191E+03 | 5.099E+03 | 3.926E+03 | 4.048E+03 | 3.396E+03 | 3.006E+03 |
| 标准差 | 1.458E+02 | 1.900E+02 | 2.555E+02 | 4.286E+02 | 4.762E+02 | 5.025E+02 | 1.626E+02 | 1.663E+02 | |
| CEC10 | 平均值 | 3.202E+03 | 3.278E+03 | 3.211E+03 | 3.873E+03 | 3.409E+03 | 3.555E+03 | 3.347E+03 | 3.247E+03 |
| 标准差 | 2.911E+01 | 8.187E+01 | 4.092E+01 | 2.340E+02 | 1.140E+02 | 1.620E+02 | 4.825E+01 | 5.346E+01 |
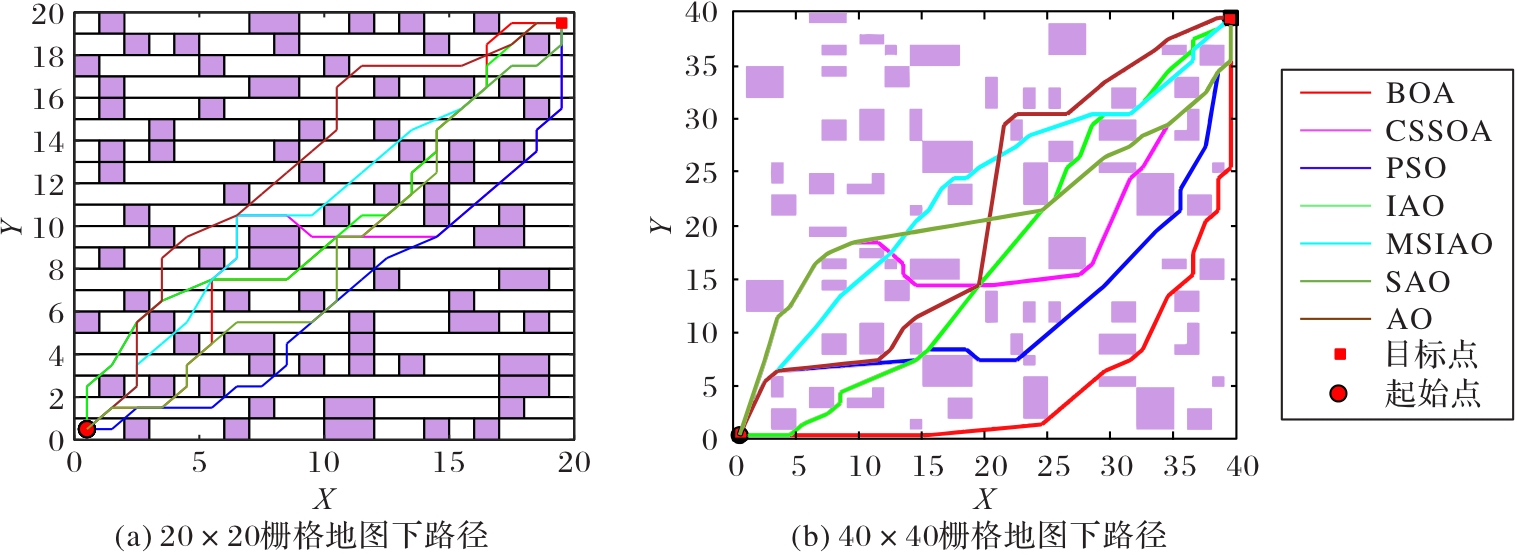
Fig. 4 Simulation diagrams of path planning in different scenarios
算法 | 20×20栅格地图 | 40×40栅格地图 | ||||
|---|---|---|---|---|---|---|
路径 平均值 | 路径 最小值 | 拐点数 | 路径 平均值 | 路径 最小值 | 拐点数 | |
BOA | 31.556 | 30.283 | 17 | 67.981 | 63.518 | 27 |
CSSOA | 33.200 | 30.926 | 19 | 68.991 | 64.425 | 28 |
PSO | 30.207 | 28.643 | 15 | 64.762 | 60.387 | 25 |
IAO | 30.029 | 27.282 | 14 | 59.066 | 56.273 | 23 |
SAO | 30.971 | 27.743 | 15 | 62.433 | 58.856 | 25 |
AO | 30.614 | 27.450 | 15 | 61.087 | 58.641 | 24 |
MSIAO | 29.443 | 26.833 | 12 | 57.865 | 54.106 | 20 |
Tab. 6 Path planning results of each algorithm
算法 | 20×20栅格地图 | 40×40栅格地图 | ||||
|---|---|---|---|---|---|---|
路径 平均值 | 路径 最小值 | 拐点数 | 路径 平均值 | 路径 最小值 | 拐点数 | |
BOA | 31.556 | 30.283 | 17 | 67.981 | 63.518 | 27 |
CSSOA | 33.200 | 30.926 | 19 | 68.991 | 64.425 | 28 |
PSO | 30.207 | 28.643 | 15 | 64.762 | 60.387 | 25 |
IAO | 30.029 | 27.282 | 14 | 59.066 | 56.273 | 23 |
SAO | 30.971 | 27.743 | 15 | 62.433 | 58.856 | 25 |
AO | 30.614 | 27.450 | 15 | 61.087 | 58.641 | 24 |
MSIAO | 29.443 | 26.833 | 12 | 57.865 | 54.106 | 20 |

Fig. 5 Convergence curve of path planning for each algorithm
| 1 | 徐平安,刘全,郝少璞,等. 融合引力搜索的双延迟深度确定策略梯度方法[J]. 软件学报, 2023, 34(11): 5191-5204. |
| XU P A, LIU Q, HAO S P, et al. Twin-delayed-based deep deterministic policy gradient method integrating gravitational search[J]. Journal of Software, 2023, 34(11): 5191-5204. | |
| 2 | 杨靖,徐碧阳,李维正,等. 基于IHBA优化模糊C均值的三维WSN分簇路由算法[J]. 通信学报, 2023, 44(12): 181-192. |
| YANG J, XU B Y, LI W Z, et al. 3D WSN clustering routing algorithm based on IHBA optimized fuzzy C-means[J]. Journal on Communications, 2023, 44(12): 181-192. | |
| 3 | 张浩,龙道银,覃涛,等. 改进人工蜂群算法的WSN覆盖连通优化[J]. 计算机工程与设计, 2022, 43(10): 2701-2710. |
| ZHANG H, LONG D Y, QIN T, et al. Coverage and connectivity optimization of WSN based on improved artificial bee colony algorithm[J]. Computer Engineering and Design, 2022, 43(10): 2701-2710. | |
| 4 | 何星月,杨靖,朱兆强,等. 基于COOT算法的VMD-HPCA-GRU超短期风电功率预测[J/OL]. 北京航空航天大学学报 [2024-04-08].. |
| HE X Y, YANG J, ZHU Z Q, et al. VMD-HPCA-GRU ultra-short-term wind power prediction based on COOT algorithm [J/OL]. Journal of Beijing University of Aeronautics and Astronautics [2024-04-08]. . | |
| 5 | YAO J, SHA Y, CHEN Y, et al. A novel ensemble of arithmetic optimization algorithm and Harris hawks optimization for solving industrial engineering optimization problems[J]. Machines, 2022, 10(8): No.602. |
| 6 | 刘成汉,何庆. 融合多策略的黄金正弦黑猩猩优化算法[J]. 自动化学报, 2023, 49(11): 2360-2373. |
| LIU C H, HE Q. Golden sine chimp optimization algorithm integrating multiple strategies[J]. Acta Automatica Sinica, 2023, 49(11): 2360-2373. | |
| 7 | 王娟,秦江涛. 混沌映射与t-分布变异策略改进的海鸥优化算法[J]. 计算机应用研究, 2022, 39(1): 170-178. |
| WANG J, QIN J T. Improved seagull optimization algorithm based on chaotic map and t-distributed mutation strategy[J]. Application Research of Computers, 2022, 39(1): 170-178. | |
| 8 | LIN X, YU X, LI W. A heuristic whale optimization algorithm with niching strategy for global multi-dimensional engineering optimization[J]. Computers and Industrial Engineering, 2022, 171: No.108361. |
| 9 | ABUALIGAH L, ELAZIZ M A, YOUSRI D, et al. Augmented arithmetic optimization algorithm using opposite-based learning and Lévy flight distribution for global optimization and data clustering[J]. Journal of Intelligent Manufacturing, 2023, 34(8): 3523-3561. |
| 10 | RAMACHANDRAN M, MIRJALILI S, NAZARI-HERIS M, et al. A hybrid grasshopper optimization algorithm and Harris hawks optimizer for combined heat and power economic dispatch problem[J]. Engineering Applications of Artificial Intelligence, 2022, 111: No.104753. |
| 11 | ABUALIGAH L, YOUSRI D, ELAZIZ M A, et al. Aquila optimizer: a novel meta-heuristic optimization algorithm[J]. Computers and Industrial Engineering, 2021, 157(1):1-37. |
| 12 | 李雅梅,孟嗣博,陈雪莲. 多策略改进的天鹰优化算法及其应用[J]. 计算机应用研究, 2023, 40(5): 1352-1359. |
| LI Y M, MENG S B, CHEN X L. Multi-strategy improved aquila optimizer and its application[J]. Application Research of Computers, 2023, 40(5): 1352-1359. | |
| 13 | 张长胜,张健忠,钱斌,等. 多策略融合的改进天鹰优化算法[J]. 电子学报, 2023, 51(5): 1245-1255. |
| ZHANG C S, ZHANG J Z, QIAN B, et al. Improved aquila optimization based on multi-strategy integration[J]. Acta Electronica Sinica, 2023, 51(5): 1245-1255. | |
| 14 | 徐亦凤,刘升,刘宇凇,等. 融合差分变异和切线飞行的天鹰优化器[J]. 计算机应用研究, 2022, 39(10): 2996-3002. |
| XU Y F, LIU S, LIU Y S, et al. Aquila optimizer integrating differential mutation and tangent flight[J]. Application Research of Computers, 2022, 39(10): 2996-3002. | |
| 15 | ZENG L, LI M, SHI J, et al. Spiral aquila optimizer based on dynamic Gaussian mutation: applications in global optimization and engineering[J]. Neural Processing Letters, 2023, 55(8): 11653-11699. |
| 16 | ZHAO J, GAO Z M, CHEN H F. The simplified aquila optimization algorithm[J]. IEEE Access, 2022, 10: 22487-22515. |
| 17 | 段玉先,刘昌云. 基于Sobol序列和纵横交叉策略的麻雀搜索算法[J]. 计算机应用, 2022, 42(1): 36-43. |
| DUAN X Y, LIU C Y. Sparrow search algorithm based on Sobol sequence and crisscross strategy[J]. Journal of Computer Applications, 2022, 42(1): 36-43. | |
| 18 | TANYILDIZI E, DEMIR G. Golden sine algorithm: a novel math-inspired algorithm[J]. Advances in Electrical and Computer Engineering, 2017, 17(2): 71-78. |
| 19 | HUANG H, QIU J, RIEDL K. On the global convergence of particle swarm optimization methods[J]. Applied Mathematics and Optimization, 2023, 88: No.30. |
| 20 | MIRJALILI S, MIRJALILI S M, LEWIS A. Grey wolf optimizer[J]. Advances in Engineering Software, 2014, 69: 46-61. |
| 21 | ARORA S, SINGH S. Butterfly optimization algorithm: a novel approach for global optimization[J]. Soft Computing, 2019, 23(3): 715-734. |
| 22 | 吕鑫,慕晓冬,张钧,等. 混沌麻雀搜索优化算法[J]. 北京航空航天大学学报, 2021, 47(8): 1712-1720. |
| LYU X, MU X D, ZHANG J, et al. Chaos sparrow search optimization algorithm[J]. Journal of Beijing University of Aeronautics and Astronautics, 2021, 47(8): 1712-1720. | |
| 23 | 徐碧阳,覃涛,魏巍,等. 基于多策略改进的蜜獾优化算法[J]. 小型微型计算机系统, 2024, 45(3): 753-762. |
| XU B Y, QIN T, WEI W, et al. Improved honey badger optimization algorithm based on multi-strategies[J]. Journal of Chinese Computer Systems, 2024, 45(3): 753-762. | |
| 24 | 刘宇凇,刘升. 成败历史存档的融合龙格库塔-黏菌算法[J]. 计算机工程与应用, 2022, 58(17): 61-71. |
| LIU Y S, LIU S. Success fail history based hybrid RUNgeKutta optimizer and slime mould algorithm[J]. Computer Engineering and Applications, 2022, 58(17): 61-71. |
| [1] | Caiqi WANG, Xining CUI, Yi XIONG, Shiqian WU. Adaptive extended RRT* path planning algorithm based on node-to-obstacle distance [J]. Journal of Computer Applications, 2025, 45(3): 920-927. |
| [2] | Xingwang WANG, Qingyang ZHANG, Shouyong JIANG, Yongquan DONG. Dynamic UAV path planning based on modified whale optimization algorithm [J]. Journal of Computer Applications, 2025, 45(3): 928-936. |
| [3] | Yi RAN, Yongsheng LI, Ye JIANG. Addressing robot path planning issues using S-shaped growth curve integrated grasshopper optimization algorithm [J]. Journal of Computer Applications, 2025, 45(1): 178-185. |
| [4] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [5] | Runze TIAN, Yulong ZHOU, Hong ZHU, Gang XUE. Local information based path selection algorithm for service migration [J]. Journal of Computer Applications, 2024, 44(7): 2168-2174. |
| [6] | Peigen GAO, Bin SUO. Experimental design and staged PSO-Kriging modeling based on weighted hesitant fuzzy set [J]. Journal of Computer Applications, 2024, 44(7): 2144-2150. |
| [7] | Jianqiang LI, Zhou HE. Hybrid NSGA-Ⅱ for vehicle routing problem with multi-trip pickup and delivery [J]. Journal of Computer Applications, 2024, 44(4): 1187-1194. |
| [8] | Xiaoxin DU, Wei ZHOU, Hao WANG, Tianru HAO, Zhenfei WANG, Mei JIN, Jianfei ZHANG. Survey of subgroup optimization strategies for intelligent algorithms [J]. Journal of Computer Applications, 2024, 44(3): 819-830. |
| [9] | Haixin HUANG, Guangwei YU, Shoushan CHENG, Chunming LI. Full coverage path planning of bridge inspection wall-climbing robot based on improved grey wolf optimization [J]. Journal of Computer Applications, 2024, 44(3): 966-971. |
| [10] | Ziyang SONG, Junhuai LI, Huaijun WANG, Xin SU, Lei YU. Path planning algorithm of manipulator based on path imitation and SAC reinforcement learning [J]. Journal of Computer Applications, 2024, 44(2): 439-444. |
| [11] | Yawei HUANG, Xuezhong QIAN, Wei SONG. Improved differential evolution algorithm based on dual-archive population size adaptive method [J]. Journal of Computer Applications, 2024, 44(12): 3844-3853. |
| [12] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [13] | Zhihui GAO, Meng HAN, Shujuan LIU, Ang LI, Dongliang MU. Survey of high utility itemset mining methods based on intelligent optimization algorithm [J]. Journal of Computer Applications, 2023, 43(6): 1676-1686. |
| [14] | Jun LIANG, Zehong HONG, Songsen YU. Image segmentation model based on improved particle swarm optimization algorithm and genetic mutation [J]. Journal of Computer Applications, 2023, 43(6): 1743-1749. |
| [15] | Zhenhua YU, Zhengqi LIU, Ying LIU, Cheng GUO. Feature selection method based on self-adaptive hybrid particle swarm optimization for software defect prediction [J]. Journal of Computer Applications, 2023, 43(4): 1206-1213. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||