


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (3): 920-927.DOI: 10.11772/j.issn.1001-9081.2024030400
• Advanced computing • Previous Articles Next Articles
Caiqi WANG, Xining CUI, Yi XIONG, Shiqian WU( )
)
Received:2024-04-08
Revised:2024-06-29
Accepted:2024-07-03
Online:2024-08-01
Published:2025-03-10
Contact:
Shiqian WU
About author:WANG Caiqi, born in 2000, M. S. candidate. His research interests include intelligent robot.Supported by:
王蔡琪, 崔西宁, 熊毅, 伍世虔()
通讯作者:
伍世虔
作者简介:王蔡琪(2000—),男,湖北荆门人,硕士研究生,主要研究方向:智能机器人基金资助:CLC Number:
Caiqi WANG, Xining CUI, Yi XIONG, Shiqian WU. Adaptive extended RRT* path planning algorithm based on node-to-obstacle distance[J]. Journal of Computer Applications, 2025, 45(3): 920-927.
王蔡琪, 崔西宁, 熊毅, 伍世虔. 基于节点到障碍物距离的自适应扩展RRT*路径规划算法[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 920-927.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024030400
| 符号 | 含义 |
|---|---|
| 起点 | |
| 目标区域中心点 | |
| 目标区域 | |
| 随机采样点 | |
| 随机采样点 | |
| 寻找附近点 | |
| 最大迭代次数 | |
| 随机树的扩展步长 | |
| 随机树 | |
| 随机树节点的集合 | |
| 连接随机树节点的边的集合 | |
| 随机树中距离随机采样点 | |
| 在 | |
| 新节点 |
Tab. 1 Definitions of symbols
| 符号 | 含义 |
|---|---|
| 起点 | |
| 目标区域中心点 | |
| 目标区域 | |
| 随机采样点 | |
| 随机采样点 | |
| 寻找附近点 | |
| 最大迭代次数 | |
| 随机树的扩展步长 | |
| 随机树 | |
| 随机树节点的集合 | |
| 连接随机树节点的边的集合 | |
| 随机树中距离随机采样点 | |
| 在 | |
| 新节点 |
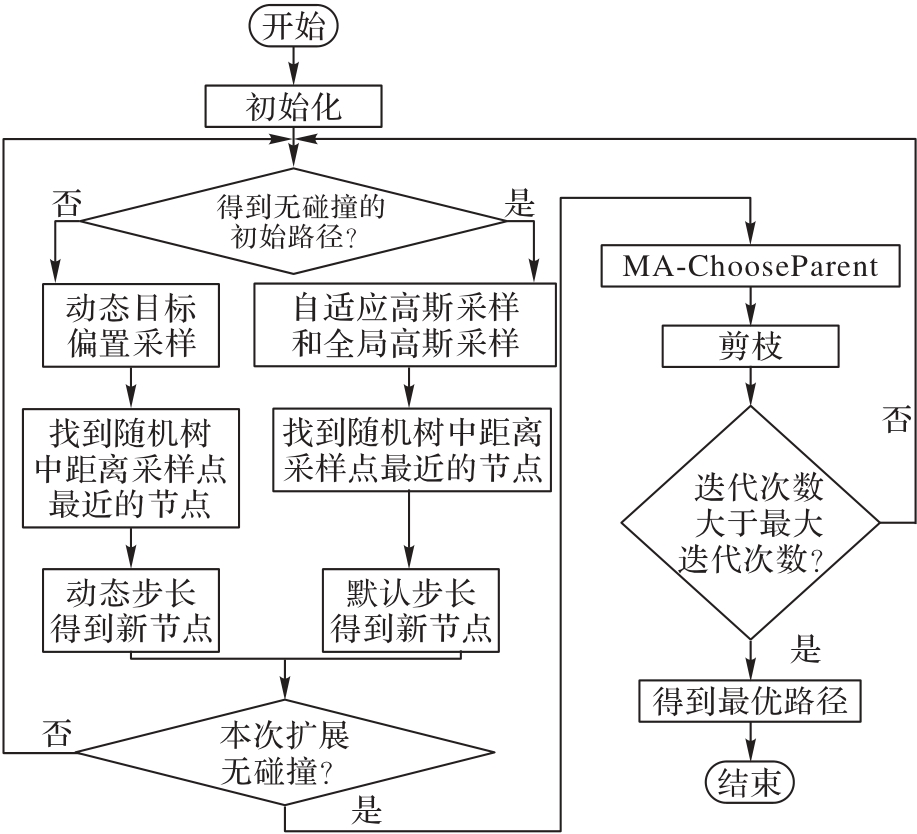
Fig. 1 Flow of AE-RRT*

Fig. 2 Sigmoid function and translated Sigmoid function

Fig. 3 Dynamic extended step size

Fig. 4 Process of parent node choice

Fig. 5 Process of adaptive Gaussian sampling

Fig. 6 Maps for simulations

Fig. 7 Convergence curves of RRT* using different step sizes
| 地图分类 | 算法 | 找到初始路径的时间/s | 初始路径的长度 |
|---|---|---|---|
单通道 地图 | RRT* | 0.285 | 687.98 |
| Q-RRT* | 0.328 | 635.59 | |
| Bi-RRT* | 0.039 | 694.60 | |
| D-RRT* | 0.028 | 747.38 | |
| DQ-RRT* | 0.073 | 657.59 | |
| AE-RRT* | 0.068 | 634.34 | |
多通道 地图 | RRT* | 0.473 | 579.25 |
| Q-RRT* | 0.510 | 559.40 | |
| Bi-RRT* | 0.029 | 594.49 | |
| D-RRT* | 0.170 | 606.65 | |
| DQ-RRT* | 0.193 | 555.23 | |
| AE-RRT* | 0.166 | 547.18 | |
散乱 地图 | RRT* | 0.274 | 514.79 |
| Q-RRT* | 0.302 | 508.81 | |
| Bi-RRT* | 0.145 | 526.12 | |
| D-RRT* | 0.135 | 507.73 | |
| DQ-RRT* | 0.138 | 496.93 | |
| AE-RRT* | 0.134 | 482.29 |
Tab. 2 Simulation results of different algorithms for finding initial paths on three maps
| 地图分类 | 算法 | 找到初始路径的时间/s | 初始路径的长度 |
|---|---|---|---|
单通道 地图 | RRT* | 0.285 | 687.98 |
| Q-RRT* | 0.328 | 635.59 | |
| Bi-RRT* | 0.039 | 694.60 | |
| D-RRT* | 0.028 | 747.38 | |
| DQ-RRT* | 0.073 | 657.59 | |
| AE-RRT* | 0.068 | 634.34 | |
多通道 地图 | RRT* | 0.473 | 579.25 |
| Q-RRT* | 0.510 | 559.40 | |
| Bi-RRT* | 0.029 | 594.49 | |
| D-RRT* | 0.170 | 606.65 | |
| DQ-RRT* | 0.193 | 555.23 | |
| AE-RRT* | 0.166 | 547.18 | |
散乱 地图 | RRT* | 0.274 | 514.79 |
| Q-RRT* | 0.302 | 508.81 | |
| Bi-RRT* | 0.145 | 526.12 | |
| D-RRT* | 0.135 | 507.73 | |
| DQ-RRT* | 0.138 | 496.93 | |
| AE-RRT* | 0.134 | 482.29 |

Fig. 8 Simulation results of single channel map

Fig. 9 Simulation results of multi-channel map

Fig. 10 Simulation results of scattered map
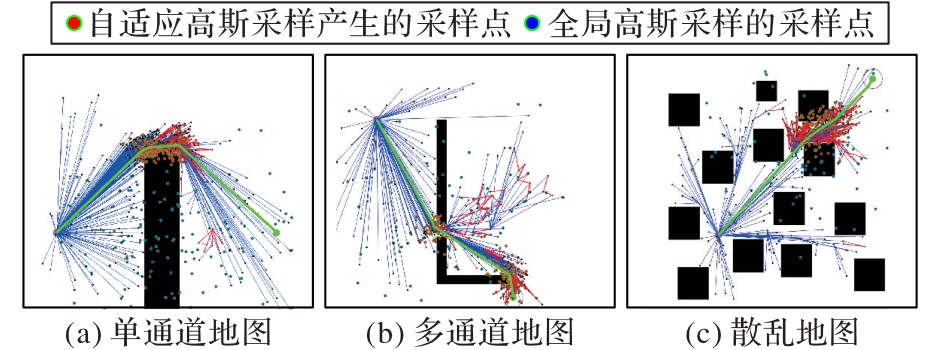
Fig. 11 Simulation effects of adaptive Gaussian sampling

Fig. 12 Path convergence curves in 2D environments
| 算法 | 单通道地图 | 多通道地图 | 散乱地图 |
|---|---|---|---|
| RRT* | 16.32 | 18.91 | 10.86 |
| Informed-RRT* | 12.01 | 7.33 | 5.09 |
| Smart-RRT* | 5.16 | 10.42 | 6.48 |
| AE-RRT* | 4.53 | 4.77 | 3.39 |
Tab. 3 Average time path to converge to global sub-optimal path
| 算法 | 单通道地图 | 多通道地图 | 散乱地图 |
|---|---|---|---|
| RRT* | 16.32 | 18.91 | 10.86 |
| Informed-RRT* | 12.01 | 7.33 | 5.09 |
| Smart-RRT* | 5.16 | 10.42 | 6.48 |
| AE-RRT* | 4.53 | 4.77 | 3.39 |
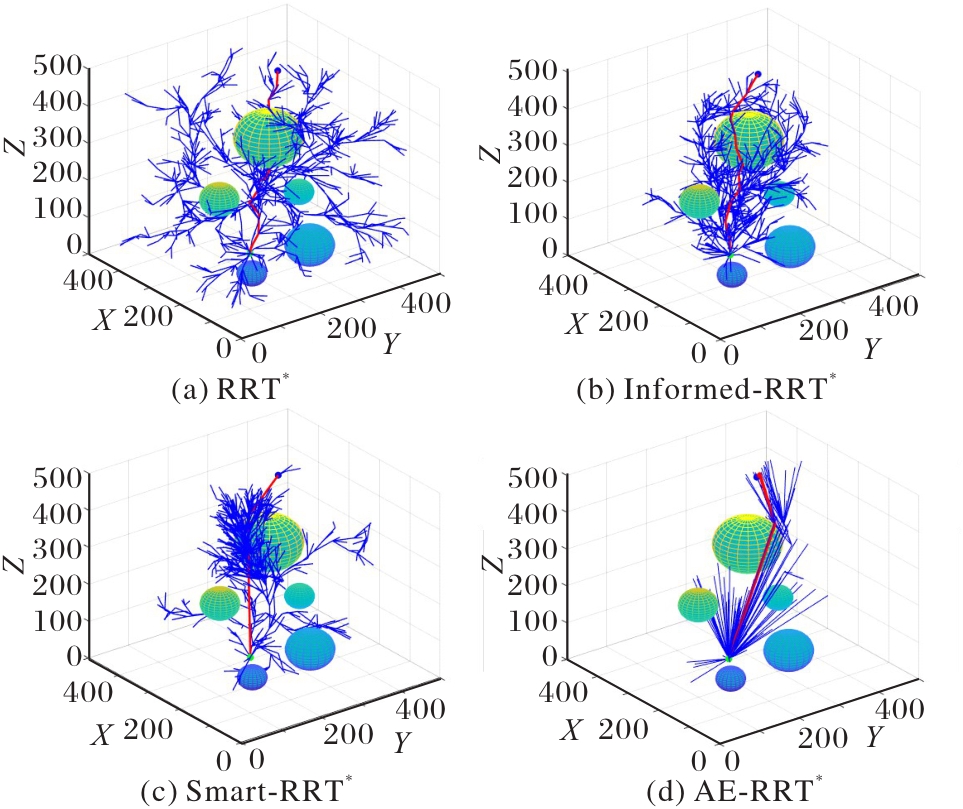
Fig. 13 Simulation results in 3D environment
| 算法 | 找到初始路径的 时间/s | 初始路径的长度 | 收敛至全局次优路径的时间/s |
|---|---|---|---|
| RRT* | 0.249 | 639.34 | 45.21 |
| Informed-RRT* | 0.257 | 643.37 | 16.56 |
| Smart-RRT* | 0.261 | 631.03 | 11.73 |
| AE-RRT* | 0.101 | 522.61 | 9.23 |
Tab. 4 Simulation results in a 3D environment
| 算法 | 找到初始路径的 时间/s | 初始路径的长度 | 收敛至全局次优路径的时间/s |
|---|---|---|---|
| RRT* | 0.249 | 639.34 | 45.21 |
| Informed-RRT* | 0.257 | 643.37 | 16.56 |
| Smart-RRT* | 0.261 | 631.03 | 11.73 |
| AE-RRT* | 0.101 | 522.61 | 9.23 |
| 1 | HA Q P, YEN L, BALAGUER C. Robotic autonomous systems for earthmoving in military applications [J]. Automation in Construction, 2019, 107: No.102934. |
| 2 | SUN Z, YANG H, MA Y, et al. BIT-DMR: a humanoid dual-arm mobile robot for complex rescue operations [J]. IEEE Robotics and Automation Letters, 2022, 7(2): 802-809. |
| 3 | AFRIN M, JIN J, RAHMAN A, et al. Resource allocation and service provisioning in multi-agent cloud robotics: a comprehensive survey [J]. IEEE Communications Surveys and Tutorials, 2021, 23(2): 842-870. |
| 4 | IBNE HOSSAIN N U, SAKIB N, GOVINDAN K. Assessing the performance of unmanned aerial vehicle for logistics and transportation leveraging the Bayesian network approach [J]. Expert Systems with Applications, 2022, 209: 118301-118318. |
| 5 | 张康,陈建平. 复杂环境下基于采样空间自调整的航迹规划算法[J]. 计算机应用, 2021, 41(4): 1207-1213. |
| ZHANG K, CHEN J P. Path planning algorithm in complex environment using self-adjusting sampling space [J]. Journal of Computer Applications, 2021, 41(4): 1207-1213. | |
| 6 | YANG L, QI J, SONG D, et al. Survey of robot 3D path planning algorithms [J]. Journal of Control Science and Engineering, 2016, 2016: No.7426913. |
| 7 | WAHAB M N AB, NEFTI-MEZIANI S, ATYABI A. A comparative review on mobile robot path planning: classical or meta-heuristic methods? [J]. Annual Reviews in Control, 2020, 50: 233-252. |
| 8 | LaVALLE S, KUFFNER J J. Rapidly-exploring random trees: progress and prospects [M]// DONALD B, LYNCH K, RUS D. Algorithmic and computational robotics: new directions 2000 WAFR. Sarasota, FL: A K Peters/CRC Press, 2001: 303-307. |
| 9 | HART P, NILSSON N J, RAPHAEL B. A formal basis for the heuristic determination of minimum cost paths [J]. IEEE Transactions on Systems Science and Cybernetics, 1968, 4(2): 100-107. |
| 10 | DIJKSTRA E W. A note on two problems in connexion with graphs[M]// APT K R, HOARE T. Edsger Wybe Dijkstra: his life, work, and legacy. New York: ACM, 2022: 287-290. |
| 11 | DANIEL K, NASH A, KOENIG S, et al. Theta*: any-angle path planning on grids [J]. Journal of Artificial Intelligence Research, 2010, 39: 533-579. |
| 12 | 陈若男,文聪聪,彭玲,等. 改进A*算法在机器人室内路径规划中的应用[J]. 计算机应用, 2019, 39(4): 1006-1011. |
| CHEN R N, WEN C C, PENG L, et al. Application of improved A* algorithm in indoor path planning for mobile robot [J]. Journal of Computer Applications, 2019, 39(4): 1006-1011. | |
| 13 | DORIGO M, GAMBARDELLA L. Ant colony system: a cooperative learning approach to the traveling salesman problem[J]. IEEE Transactions on Evolutionary Computation, 1997, 1(1): 53-66. |
| 14 | TU J, YANG S X. Genetic algorithm based path planning for a mobile robot [C]// Proceedings of the 2003 IEEE International Conference on Robotics and Automation — Volume 1. Piscataway: IEEE, 2003: 1221-1226. |
| 15 | ROBERGE V, TARBOUCHI M, LABONTE G. Comparison of parallel genetic algorithm and particle swarm optimization for real-time UAV path planning [J]. IEEE Transactions on Industrial Informatics, 2013, 9(1): 132-141. |
| 16 | 李二超,齐款款. B样条曲线融合蚁群算法的机器人路径规划[J]. 计算机应用, 2021, 41(12): 3558-3564. |
| LI E C, QI K K. Robot path planning based on B-spline curve and ant colony algorithm [J]. Journal of Computer Applications, 2021, 41(12): 3558-3564. | |
| 17 | 邓辅秦,黄焕钊,谭朝恩,等. 结合遗传算法和滚动调度的多机器人任务分配算法[J]. 计算机应用, 2023, 43(12): 3833-3839. |
| DENG F Q, HUANG H Z, TAN C E, et al. Multi-robot task allocation algorithm combining genetic algorithm and rolling scheduling [J]. Journal of Computer Applications, 2023, 43(12): 3833-3839. | |
| 18 | ZHOU C, HUANG B, FRÄNTI P. A review of motion planning algorithms for intelligent robots [J]. Journal of Intelligent Manufacturing, 2022, 33(2): 387-424. |
| 19 | LaVALLE S M. Rapidly-exploring random trees: a new tool for path planning [EB/OL]. [2023-12-12]. . |
| 20 | KARAMAN S, WALTER M R, PEREZ A, et al. Anytime motion planning using the RRT* [C]// Proceedings of the 2011 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2011: 1478-1483. |
| 21 | BOHLIN R, KAVRAKI L E. Path planning using lazy PRM [C]// Proceedings of the 2000 IEEE International Conference on Robotics and Automation — Volume 1. Piscataway: IEEE, 2000: 521-528. |
| 22 | KARAMAN S, FRAZZOLI E. Sampling-based algorithms for optimal motion planning [J]. The International Journal of Robotics Research, 2011, 30(7): 846-894. |
| 23 | WEBB D J, VAN DEN BERG J. Kinodynamic RRT*: asymptotically optimal motion planning for robots with linear dynamics [C]// Proceedings of the 2013 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2013: 5054-5061. |
| 24 | WANG X, WEI J, ZHOU X, et al. AEB-RRT*: an adaptive extension bidirectional RRT* algorithm [J]. Autonomous Robots, 2022, 46(6): 685-704. |
| 25 | GAMMELL J D, SRINIVASA S S, BARFOOT D. Informed RRT: optimal sampling-based path planning focused via direct sampling of an admissible ellipsoidal heuristic [C]// Proceedings of the 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2014: 2997-3004. |
| 26 | GAMMELL J D, BARFOOT D, SRINIVASA S S. Informed sampling for asymptotically optimal path planning [J]. IEEE Transactions on Robotics, 2018, 34(4): 966-984. |
| 27 | ISLAM F, NASIR J, MALIK U, et al. RRT*-Smart: rapid convergence implementation of RRT∗ towards optimal solution[C]// Proceedings of the 2012 IEEE International Conference on Mechatronics and Automation. Piscataway: IEEE, 2012: 1651-1656. |
| 28 | JEONG I B, LEE S J, KIM J H. Quick-RRT*: triangular inequality-based implementation of RRT* with improved initial solution and convergence rate [J]. Expert Systems with Applications, 2019, 123: 82-90. |
| 29 | CHABRIER A. Vehicle Routing Problem with elementary shortest path based column generation [J]. Computers and Operations Research, 2006, 33(10): 2972-2990. |
| 30 | LINGELBACH F. Path planning using probabilistic cell decomposition [C]// Proceedings of the 2004 IEEE International Conference on Robotics and Automation — Volume 1. Piscataway: IEEE, 2004: 467-472. |
| 31 | JORDAN M, PEREZ A. Optimal bidirectional rapidly-exploring random trees: MIT-CSAIL-TR-2013-021[R/OL]. [2024-01-23].. |
| [1] | Yi RAN, Yongsheng LI, Ye JIANG. Addressing robot path planning issues using S-shaped growth curve integrated grasshopper optimization algorithm [J]. Journal of Computer Applications, 2025, 45(1): 178-185. |
| [2] | Runze TIAN, Yulong ZHOU, Hong ZHU, Gang XUE. Local information based path selection algorithm for service migration [J]. Journal of Computer Applications, 2024, 44(7): 2168-2174. |
| [3] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [4] | Jianqiang LI, Zhou HE. Hybrid NSGA-Ⅱ for vehicle routing problem with multi-trip pickup and delivery [J]. Journal of Computer Applications, 2024, 44(4): 1187-1194. |
| [5] | Haixin HUANG, Guangwei YU, Shoushan CHENG, Chunming LI. Full coverage path planning of bridge inspection wall-climbing robot based on improved grey wolf optimization [J]. Journal of Computer Applications, 2024, 44(3): 966-971. |
| [6] | Ziyang SONG, Junhuai LI, Huaijun WANG, Xin SU, Lei YU. Path planning algorithm of manipulator based on path imitation and SAC reinforcement learning [J]. Journal of Computer Applications, 2024, 44(2): 439-444. |
| [7] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [8] | Yongdi LI, Caihong LI, Yaoyu ZHANG, Guosheng ZHANG. Mobile robot path planning based on improved SAC algorithm [J]. Journal of Computer Applications, 2023, 43(2): 654-660. |
| [9] | Lin HUANG, Qiang FU, Nan TONG. Solving robot path planning problem by adaptively adjusted Harris hawk optimization algorithm [J]. Journal of Computer Applications, 2023, 43(12): 3840-3847. |
| [10] | Chen LIU, Yang CHEN, Hao FU. UAV path planning for persistent monitoring based on value function iteration [J]. Journal of Computer Applications, 2023, 43(10): 3290-3296. |
| [11] | Houming FAN, Shuang MU, Lijun YUE. Collaborative optimization of automated guided vehicle scheduling and path planning considering conflict and congestion [J]. Journal of Computer Applications, 2022, 42(7): 2281-2291. |
| [12] | Sheng CHEN, Jun ZHOU, Xiaobing HU, Ji MA. Optimization of airport arrival procedures based on hybrid simulated annealing algorithm [J]. Journal of Computer Applications, 2022, 42(2): 606-615. |
| [13] | LI Kairong, LIU Shuang, HU Qianqian, TANG Yiyuan. Improved ant colony optimization algorithm for path planning based on turning angle constraint [J]. Journal of Computer Applications, 2021, 41(9): 2560-2568. |
| [14] | TANG Andi, HAN Tong, XU Dengwu, XIE Lei. Path planning method of unmanned aerial vehicle based on chaos sparrow search algorithm [J]. Journal of Computer Applications, 2021, 41(7): 2128-2136. |
| [15] | ZHANG Kang, CHEN Jianping. Path planning algorithm in complex environment using self-adjusting sampling space [J]. Journal of Computer Applications, 2021, 41(4): 1207-1213. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||