


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (12): 4055-4063.DOI: 10.11772/j.issn.1001-9081.2024111670
• Frontier and comprehensive applications • Previous Articles Next Articles
Received:2024-11-29
Revised:2025-03-27
Accepted:2025-04-08
Online:2025-04-22
Published:2025-12-10
Contact:
Wei ZHANG
About author:CHEN Xiaojuan, born in 2000, M. S. candidate. Her research interests include UAV logistics delivery, task allocation.
Supported by:
陈晓娟, 张薇( )
)
通讯作者:
张薇
作者简介:陈晓娟(2000—),女,山东泰安人,硕士研究生,CCF会员,主要研究方向:无人机物流配送、任务分配基金资助:CLC Number:
Xiaojuan CHEN, Wei ZHANG. Task allocation of unmanned aerial vehicle for rural last-mile delivery based on reinforcement learning[J]. Journal of Computer Applications, 2025, 45(12): 4055-4063.
陈晓娟, 张薇. 基于强化学习的无人机乡村末端配送任务分配[J]. 《计算机应用》唯一官方网站, 2025, 45(12): 4055-4063.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024111670
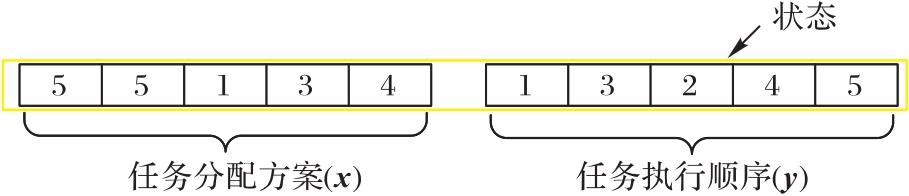
Fig.1 State diagram
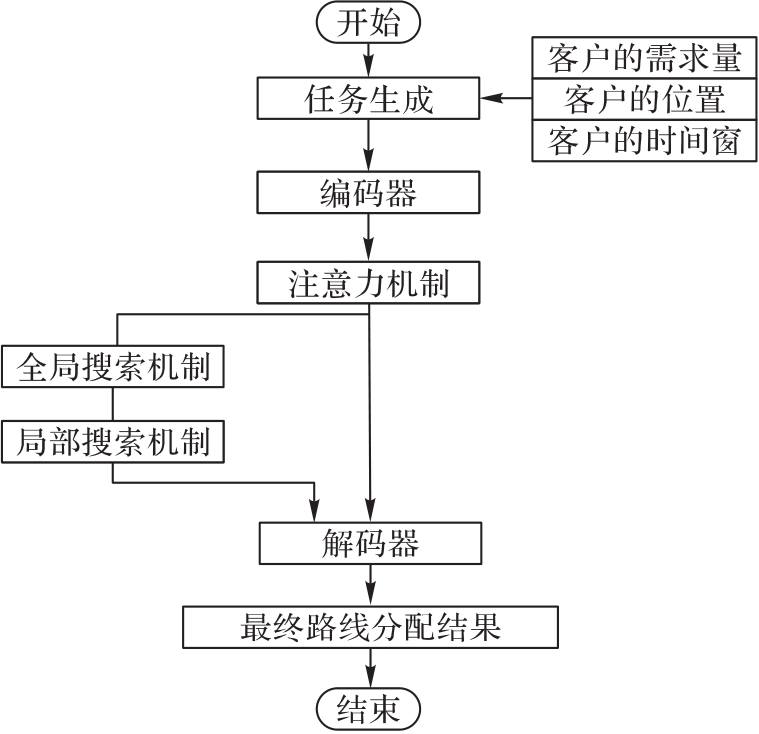
Fig.2 Architecture of proposed algorithm
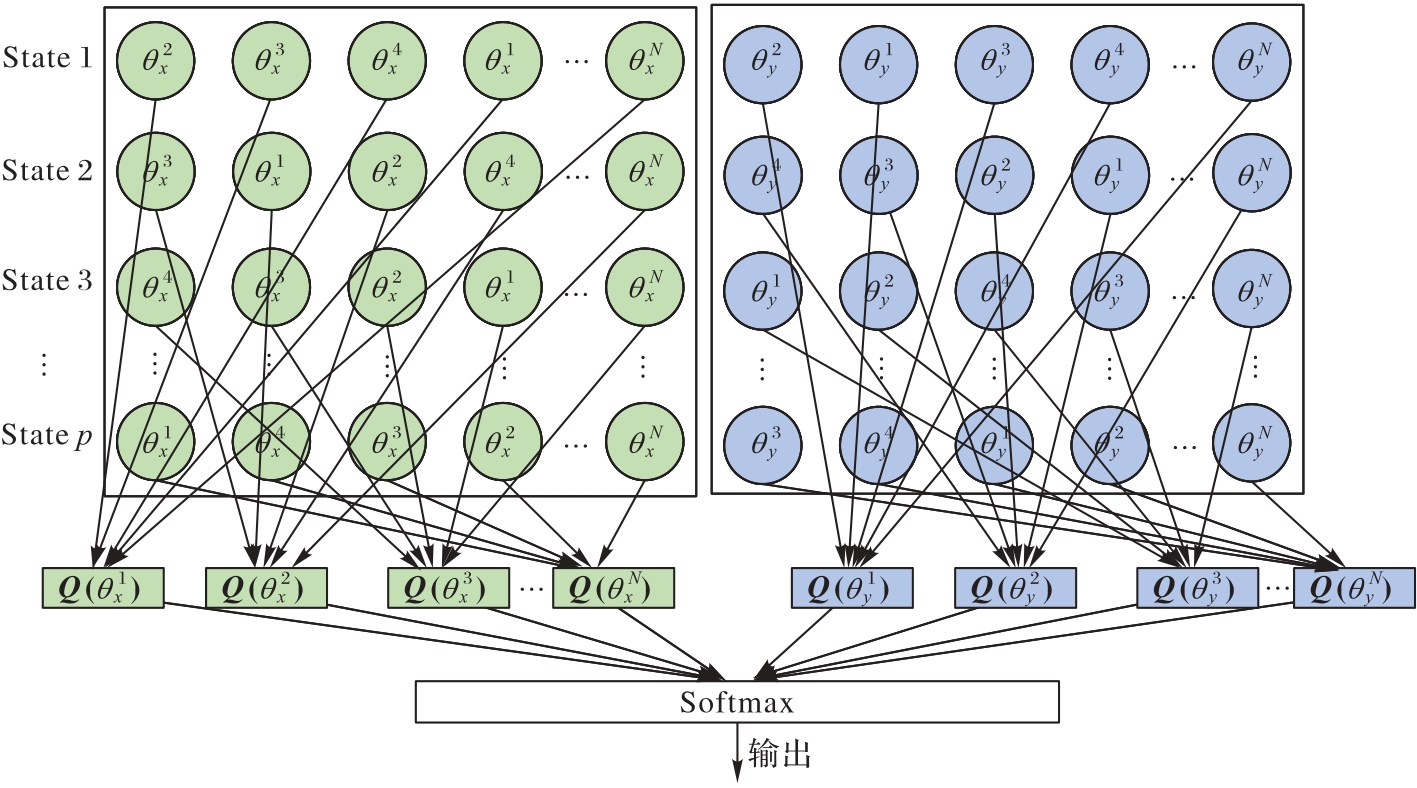
Fig.3 Attention mechanism
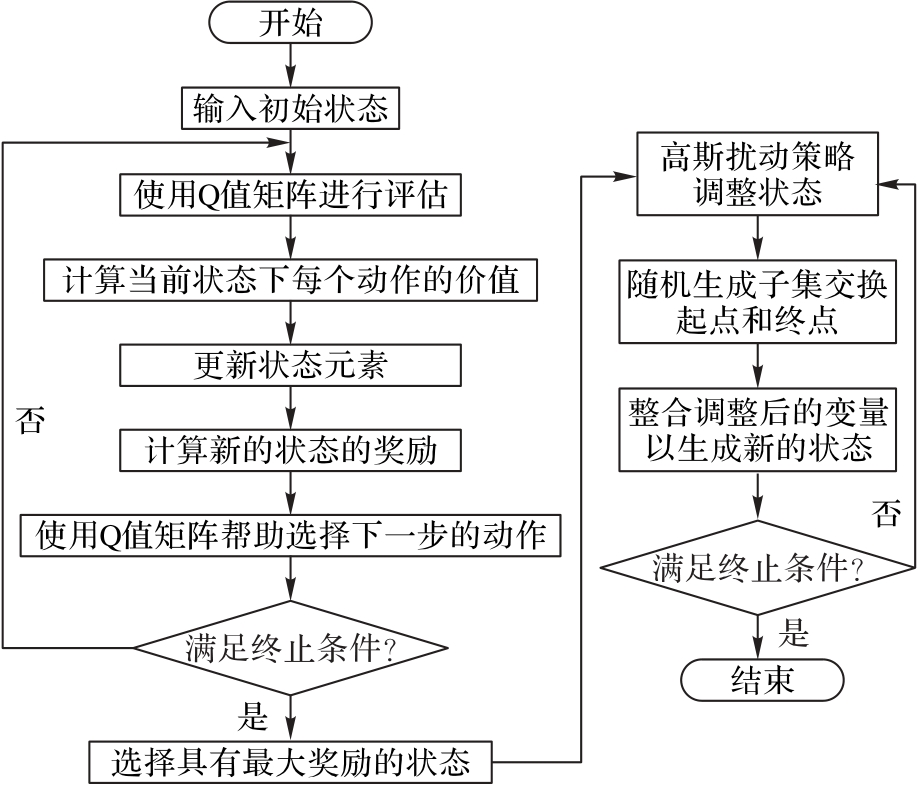
Fig.4 Flow of global-local search strategy
| 参数含义 | 参数 | 值 |
|---|---|---|
| 最大容量 | Q | 5 kg |
| 飞行速度 | v | 10 m/s |
| 最远飞行距离 | D | 10 km |
| UAV数 | M | 10 |
Tab.1 UAV parameters
| 参数含义 | 参数 | 值 |
|---|---|---|
| 最大容量 | Q | 5 kg |
| 飞行速度 | v | 10 m/s |
| 最远飞行距离 | D | 10 km |
| UAV数 | M | 10 |
| 客户ID | 时间窗 | 坐标点/km | 需货量/kg |
|---|---|---|---|
| 1 | [13:20, 14:05] | [0.99, 3.80] | 2.1 |
| 2 | [13:40, 15:02] | [4.06, 3.06] | 1.2 |
| 3 | [14:30, 15:55] | [0.45, 1.50] | 1.3 |
| 4 | [17:50, 19:13] | [3.60, 1.45] | 2.1 |
| 5 | [17:10, 17:46] | [3.42, 4.76] | 1.2 |
| 6 | [16:40, 17:59] | [2.49, 1.12] | 1.7 |
| 7 | [14:30, 15:51] | [0.23, 3.13] | 1.2 |
| 8 | [15:20, 16:28] | [3.08, 2.56] | 2.3 |
| 9 | [13:00, 13:52] | [3.85, 0.10] | 3.0 |
| 10 | [13:20, 14:20] | [3.16, 3.74] | 1.3 |
| 11 | [14:00, 14:59] | [0.84, 0.44] | 2.6 |
| 12 | [15:40, 16:10] | [1.86, 3.36] | 2.2 |
| 13 | [17:00, 18:04] | [2.21, 2.17] | 1.5 |
| 14 | [12:10, 13:36] | [4.58, 3.57] | 3.8 |
| 15 | [16:10, 16:54] | [4.54, 1.59] | 1.1 |
| 16 | [16:10, 17:30] | [0.56, 4.14] | 2.7 |
| 17 | [17:20, 18:00] | [3.25, 3.00] | 2.4 |
| 18 | [9:30, 10:36] | [0.01, 2.56] | 2.8 |
| 19 | [14:30, 15:44] | [2.71, 0.71] | 1.7 |
| 20 | [13:50, 15:15] | [4.02, 2.60] | 0.6 |
Tab.2 Logistics delivery point task parameters
| 客户ID | 时间窗 | 坐标点/km | 需货量/kg |
|---|---|---|---|
| 1 | [13:20, 14:05] | [0.99, 3.80] | 2.1 |
| 2 | [13:40, 15:02] | [4.06, 3.06] | 1.2 |
| 3 | [14:30, 15:55] | [0.45, 1.50] | 1.3 |
| 4 | [17:50, 19:13] | [3.60, 1.45] | 2.1 |
| 5 | [17:10, 17:46] | [3.42, 4.76] | 1.2 |
| 6 | [16:40, 17:59] | [2.49, 1.12] | 1.7 |
| 7 | [14:30, 15:51] | [0.23, 3.13] | 1.2 |
| 8 | [15:20, 16:28] | [3.08, 2.56] | 2.3 |
| 9 | [13:00, 13:52] | [3.85, 0.10] | 3.0 |
| 10 | [13:20, 14:20] | [3.16, 3.74] | 1.3 |
| 11 | [14:00, 14:59] | [0.84, 0.44] | 2.6 |
| 12 | [15:40, 16:10] | [1.86, 3.36] | 2.2 |
| 13 | [17:00, 18:04] | [2.21, 2.17] | 1.5 |
| 14 | [12:10, 13:36] | [4.58, 3.57] | 3.8 |
| 15 | [16:10, 16:54] | [4.54, 1.59] | 1.1 |
| 16 | [16:10, 17:30] | [0.56, 4.14] | 2.7 |
| 17 | [17:20, 18:00] | [3.25, 3.00] | 2.4 |
| 18 | [9:30, 10:36] | [0.01, 2.56] | 2.8 |
| 19 | [14:30, 15:44] | [2.71, 0.71] | 1.7 |
| 20 | [13:50, 15:15] | [4.02, 2.60] | 0.6 |
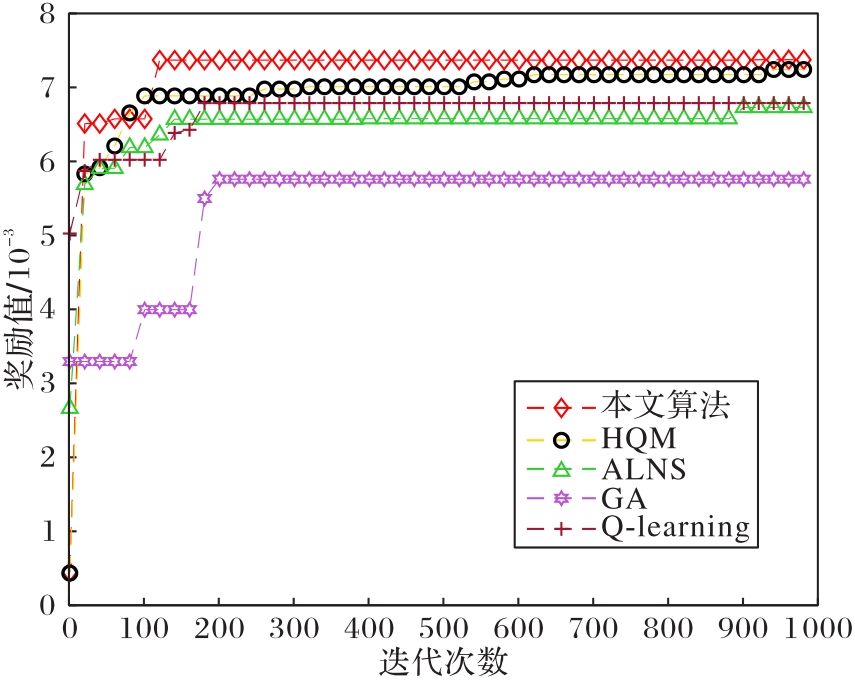
Fig.5 Reward value curves

Fig.6 Q-value convergence curves
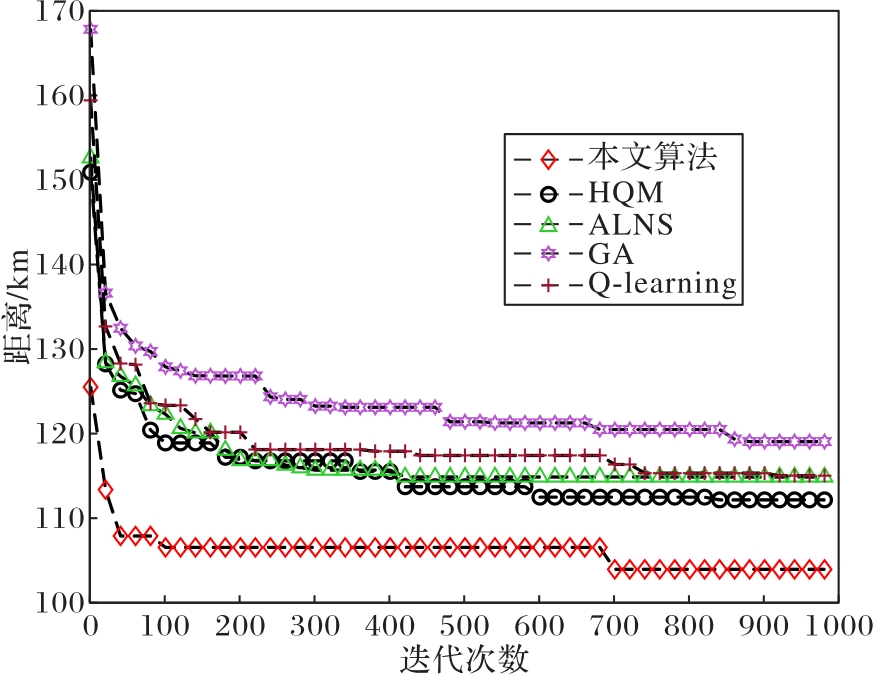
Fig.7 Path length curves
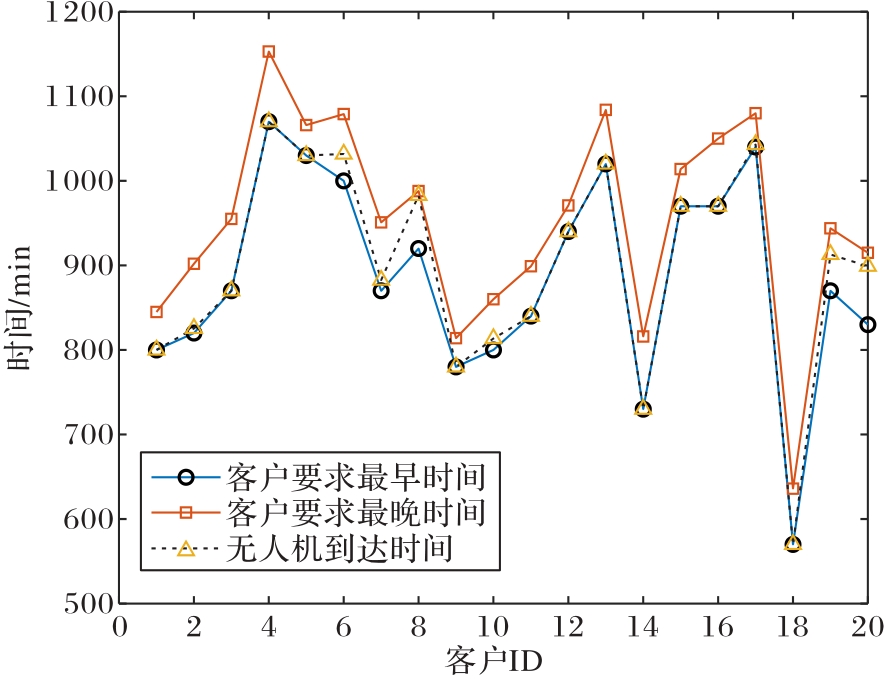
Fig.8 Arrival time of UAV
| UAV_ID | 客户ID送达顺序 |
|---|---|
| 1 | 0 → 3 → 7 → 20 → 19 → 0 |
| 2 | 0 → 16 → 0 → 4 → 0 |
| 3 | 0 → 14 → 0 → 12 → 0 → 13 → 6 → 0 |
| 4 | 0 → 18 → 0 → 1 → 10 → 2 → 0 |
| 5 | 0 → 11 → 0 |
| 6 | 0 → 15 → 8 → 0 |
| 7 | 0 → 9 → 0 → 5 → 17 → 0 |
Tab.3 Task execution sequence of UAVs
| UAV_ID | 客户ID送达顺序 |
|---|---|
| 1 | 0 → 3 → 7 → 20 → 19 → 0 |
| 2 | 0 → 16 → 0 → 4 → 0 |
| 3 | 0 → 14 → 0 → 12 → 0 → 13 → 6 → 0 |
| 4 | 0 → 18 → 0 → 1 → 10 → 2 → 0 |
| 5 | 0 → 11 → 0 |
| 6 | 0 → 15 → 8 → 0 |
| 7 | 0 → 9 → 0 → 5 → 17 → 0 |
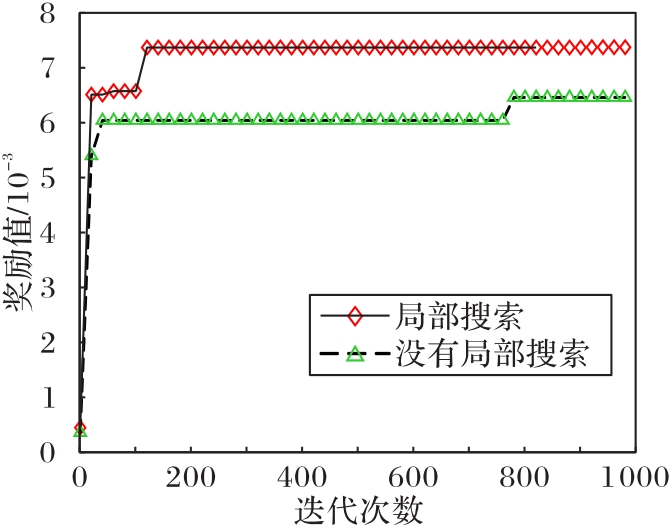
Fig.9 Experimental results with and without local search
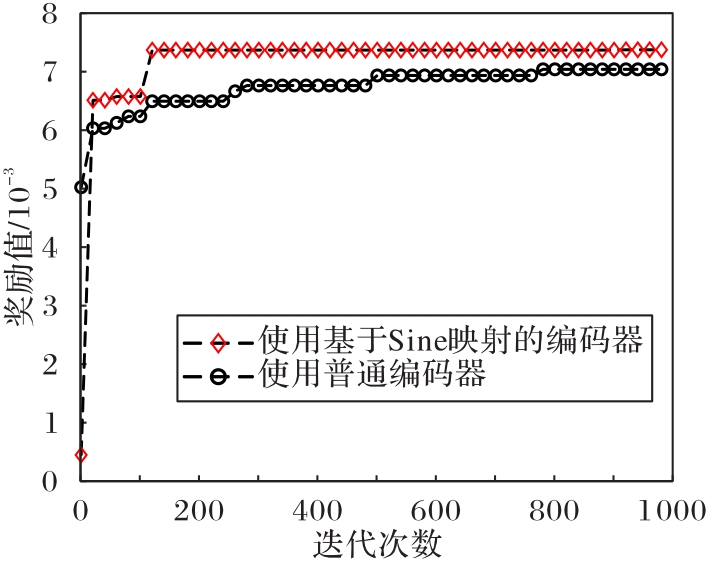
Fig.10 Impact of different encoders on reward value
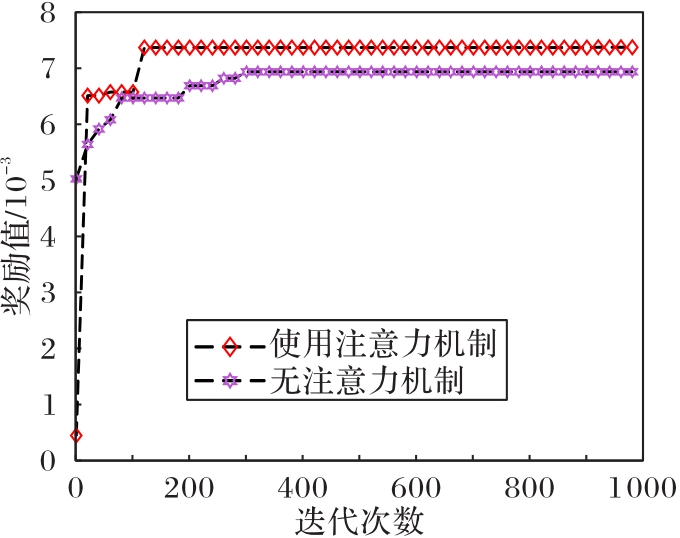
Fig.11 Impact of attention mechanism on reward value
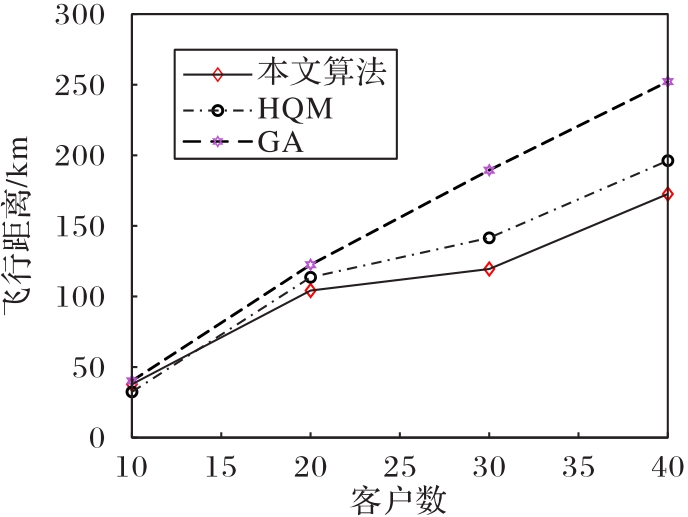
Fig.12 Flight path length curves of UAVs at different customer scales
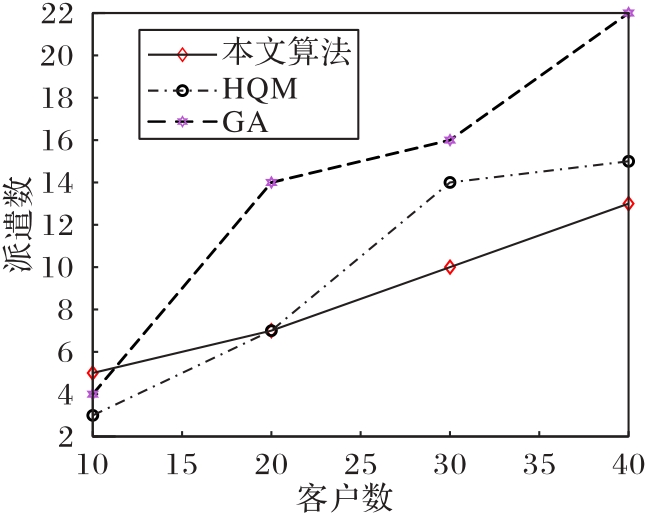
Fig.13 Number of dispatched UAVs for different customer sizes
| 客户ID | 时间窗 | UAV 到达时间 | 客户ID | 时间窗 | UAV 到达时间 |
|---|---|---|---|---|---|
| 1 | [16:30,17:15] | 16:38 | 11 | [17:50,18:20] | 17:50 |
| 2 | [14:30,15:55] | 15:14 | 12 | [10:20,11:25] | 10:20 |
| 3 | [15:40,17:02] | 17:00 | 13 | [15:40,17:06] | 16:27 |
| 4 | [15:30,16:06] | 15:30 | 14 | [16:10,16:55] | 16:10 |
| 5 | [10:30,11:50] | 10:30 | 15 | [16:10,17:30] | 16:10 |
| 6 | [14:30,15:50] | 14:30 | 16 | [13:50,14:55] | 14:41 |
| 7 | [15:40,16:50] | 16:23 | 17 | [17:50,18:30] | 18:02 |
| 8 | [13:00,13:30] | 13:00 | 18 | [16:20,17:35] | 17:12 |
| 9 | [16:50,17:50] | 16:50 | 19 | [13:50,15:15] | 14:58 |
| 10 | [11:20,12:10] | 11:20 | 20 | [17:00,17:30] | 17:08 |
Tab.4 Customers’ time window requirements and UAV arrival time
| 客户ID | 时间窗 | UAV 到达时间 | 客户ID | 时间窗 | UAV 到达时间 |
|---|---|---|---|---|---|
| 1 | [16:30,17:15] | 16:38 | 11 | [17:50,18:20] | 17:50 |
| 2 | [14:30,15:55] | 15:14 | 12 | [10:20,11:25] | 10:20 |
| 3 | [15:40,17:02] | 17:00 | 13 | [15:40,17:06] | 16:27 |
| 4 | [15:30,16:06] | 15:30 | 14 | [16:10,16:55] | 16:10 |
| 5 | [10:30,11:50] | 10:30 | 15 | [16:10,17:30] | 16:10 |
| 6 | [14:30,15:50] | 14:30 | 16 | [13:50,14:55] | 14:41 |
| 7 | [15:40,16:50] | 16:23 | 17 | [17:50,18:30] | 18:02 |
| 8 | [13:00,13:30] | 13:00 | 18 | [16:20,17:35] | 17:12 |
| 9 | [16:50,17:50] | 16:50 | 19 | [13:50,15:15] | 14:58 |
| 10 | [11:20,12:10] | 11:20 | 20 | [17:00,17:30] | 17:08 |
| UAV_ID | 客户ID送达顺序 |
|---|---|
| 1 | 0 → 6 → 19 → 2 → 0 → 15 → 13 → 1 → 0 |
| 2 | 0 → 5 → 0 → 16 → 0 |
| 3 | 0 → 12 → 0 → 4 → 0 |
| 4 | 0 → 14 → 7 → 0 → 3 → 18 → 0 |
| 5 | 0 → 11 → 17 → 0 |
| 6 | 0 → 9 → 20 → 0 |
| 7 | 0 → 10 → 0 → 8 → 0 |
Tab.5 Task execution sequence of UAVs after changing time window
| UAV_ID | 客户ID送达顺序 |
|---|---|
| 1 | 0 → 6 → 19 → 2 → 0 → 15 → 13 → 1 → 0 |
| 2 | 0 → 5 → 0 → 16 → 0 |
| 3 | 0 → 12 → 0 → 4 → 0 |
| 4 | 0 → 14 → 7 → 0 → 3 → 18 → 0 |
| 5 | 0 → 11 → 17 → 0 |
| 6 | 0 → 9 → 20 → 0 |
| 7 | 0 → 10 → 0 → 8 → 0 |
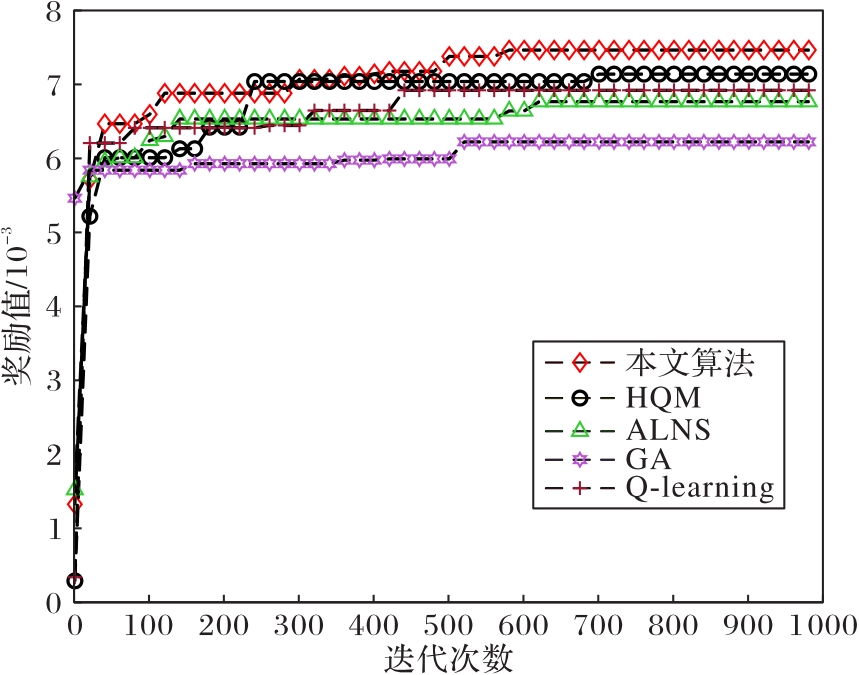
Fig.14 Reward value curves after changing time window
| 组序 | 奖励值 | 距离/km | 算法时长/s | 组序 | 奖励值 | 距离/km | 算法时长/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.025 | 0.475 | 0.500 | 0.005 8 | 107.115 | 648.00 | 11 | 0.275 | 0.225 | 0.500 | 0.007 3 | 104.740 | 623.05 |
| 2 | 0.050 | 0.450 | 0.500 | 0.006 3 | 107.480 | 628.00 | 12 | 0.300 | 0.200 | 0.500 | 0.007 4 | 103.950 | 598.22 |
| 3 | 0.075 | 0.425 | 0.500 | 0.006 1 | 106.750 | 633.32 | 13 | 0.325 | 0.175 | 0.500 | 0.003 3 | 104.340 | 615.14 |
| 4 | 0.100 | 0.400 | 0.500 | 0.006 4 | 106.320 | 757.59 | 14 | 0.350 | 0.150 | 0.500 | 0.003 0 | 105.140 | 613.58 |
| 5 | 0.125 | 0.375 | 0.500 | 0.005 9 | 106.970 | 700.83 | 15 | 0.375 | 0.125 | 0.500 | 0.002 3 | 106.730 | 613.10 |
| 6 | 0.150 | 0.350 | 0.500 | 0.005 0 | 106.440 | 596.80 | 16 | 0.400 | 0.100 | 0.500 | 0.002 3 | 106.600 | 581.15 |
| 7 | 0.175 | 0.325 | 0.500 | 0.004 8 | 105.670 | 636.85 | 17 | 0.425 | 0.075 | 0.500 | 0.002 2 | 105.210 | 608.78 |
| 8 | 0.200 | 0.300 | 0.500 | 0.004 2 | 105.240 | 612.48 | 18 | 0.450 | 0.050 | 0.500 | 0.002 1 | 106.900 | 606.85 |
| 9 | 0.225 | 0.275 | 0.500 | 0.005 9 | 105.120 | 616.10 | 19 | 0.475 | 0.025 | 0.500 | 0.002 0 | 105.460 | 623.10 |
| 10 | 0.250 | 0.250 | 0.500 | 0.006 5 | 105.140 | 598.00 |
Tab.6 Influence of different task objective function weights on experimental results
| 组序 | 奖励值 | 距离/km | 算法时长/s | 组序 | 奖励值 | 距离/km | 算法时长/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 1 | 0.025 | 0.475 | 0.500 | 0.005 8 | 107.115 | 648.00 | 11 | 0.275 | 0.225 | 0.500 | 0.007 3 | 104.740 | 623.05 |
| 2 | 0.050 | 0.450 | 0.500 | 0.006 3 | 107.480 | 628.00 | 12 | 0.300 | 0.200 | 0.500 | 0.007 4 | 103.950 | 598.22 |
| 3 | 0.075 | 0.425 | 0.500 | 0.006 1 | 106.750 | 633.32 | 13 | 0.325 | 0.175 | 0.500 | 0.003 3 | 104.340 | 615.14 |
| 4 | 0.100 | 0.400 | 0.500 | 0.006 4 | 106.320 | 757.59 | 14 | 0.350 | 0.150 | 0.500 | 0.003 0 | 105.140 | 613.58 |
| 5 | 0.125 | 0.375 | 0.500 | 0.005 9 | 106.970 | 700.83 | 15 | 0.375 | 0.125 | 0.500 | 0.002 3 | 106.730 | 613.10 |
| 6 | 0.150 | 0.350 | 0.500 | 0.005 0 | 106.440 | 596.80 | 16 | 0.400 | 0.100 | 0.500 | 0.002 3 | 106.600 | 581.15 |
| 7 | 0.175 | 0.325 | 0.500 | 0.004 8 | 105.670 | 636.85 | 17 | 0.425 | 0.075 | 0.500 | 0.002 2 | 105.210 | 608.78 |
| 8 | 0.200 | 0.300 | 0.500 | 0.004 2 | 105.240 | 612.48 | 18 | 0.450 | 0.050 | 0.500 | 0.002 1 | 106.900 | 606.85 |
| 9 | 0.225 | 0.275 | 0.500 | 0.005 9 | 105.120 | 616.10 | 19 | 0.475 | 0.025 | 0.500 | 0.002 0 | 105.460 | 623.10 |
| 10 | 0.250 | 0.250 | 0.500 | 0.006 5 | 105.140 | 598.00 |
| [1] | 吕璐璐,侯庆丰. 西北农村物流“最后一公里”配送问题及对策研究[J]. 物流科技, 2024, 47(15): 40-42, 54. |
| LYU L L, HOU Q F. Research on the “last kilometer” distribution problems and countermeasures of rural logistics in Northwest China[J]. Logistics Sci-Tech, 2024, 47(15): 40-42, 54. | |
| [2] | ESKANDARIPOUR H, BOLDSAIKHAN E. Last-mile drone delivery: past, present, and future[J]. Drones, 2023, 7(2): No.77. |
| [3] | 李章萍,贺亚蒙. 基于GA-SA组合算法的山区复杂环境无人机起降点选址[J]. 科学技术与工程, 2024, 24(2): 850-857. |
| LI Z P, HE Y M. Site selection of unmanned aerial vehicle take-off and landing points in mountainous complex environments based on GA-SA combination algorithm[J]. Science Technology and Engineering, 2024, 24(2): 850-857. | |
| [4] | 陈希琼,王兴隆,胡大伟. 考虑等待成本的卡车与多无人机联合配送农村物流路径优化[J]. 运筹与管理, 2024, 33(8): 23-29. |
| CHEN X Q, WANG X L, HU D W. Rural e-commerce logistics route optimization by joint truck and multi-drone delivery considering waiting cost[J]. Operations Research and Management Science, 2024, 33(8): 23-29. | |
| [5] | 韩鹏,张冰玉. 基于改进蚁群算法的无人机安全航路规划研究[J]. 中国安全科学学报, 2021, 31(1): 24-29. |
| HAN P, ZHANG B Y. Safety route planning of UAV based on improved ant colony algorithm[J]. Chinese Safety Science Journal, 2021, 31(1): 24-29. | |
| [6] | 郭兴海,计明军,温都苏,等. “最后一公里”配送的分布式多无人机的任务分配和路径规划[J]. 系统工程理论与实践, 2021, 41(4): 946-961. |
| GUO X H, JI M J, WEN D S, et al. Task assignment and path planning for distributed multiple unmanned aerial vehicles in the “last mile” [J]. Systems Engineering — Theory and Practice, 2021, 41(4): 946-961. | |
| [7] | 伍国华,毛妮,徐彬杰,等. 基于自适应大规模邻域搜索算法的多车辆与多无人机协同配送方法[J]. 控制与决策, 2023, 38(1): 201-210. |
| WU G H, MAO N, XU B J, et al. The cooperative delivery of multiple vehicles and multiple drones based on adaptive large neighborhood search[J]. Control and Decision, 2023, 38(1): 201-210. | |
| [8] | 张歆悦,靳鹏,胡笑旋,等. 时间依赖型多配送中心带时间窗的开放式车辆路径问题研究[J]. 中国管理科学, 2024, 32(1): 146-157. |
| ZHANG X Y, JIN P, HU X X, et al. Research on the time-dependent multi-depot open vehicle routing problem with time windows[J]. Chinese Journal of Management Science, 2024, 32(1): 146-157. | |
| [9] | 苏欣欣,秦虎,王恺. 禁忌搜索算法求解带时间窗和多配送人员的车辆路径问题[J]. 重庆师范大学学报(自然科学版), 2020, 37(1): 22-30. |
| SU X X, QIN H, WANG K. Tabu search algorithm for the vehicle routing problem with time windows and multiple deliverymen[J]. Journal of Chongqing Normal University (Natural Science), 2020, 37(1): 22-30. | |
| [10] | DELL’ AMICO M, MONTEMANNI R, NOVELLANI S. Matheuristic algorithms for the parallel drone scheduling traveling salesman problem[J]. Annals of Operations Research, 2020, 289(2): 211-226. |
| [11] | 王迪,金辉. 贪婪鲸鱼优化算法求解带时间窗的快递末端配送路径问题[J]. 计算机应用与软件, 2020, 37(6): 263-268. |
| WANG D, JIN H. Greedy whale optimization algorithm for solving the delivery path problem of express delivery with time window at the end[J]. Computer Applications and Software, 2020, 37(6): 263-268. | |
| [12] | AGRAWAL A, BEDI A S, MANOCHA D. RTAW: an attention inspired reinforcement learning method for multi-robot task allocation in warehouse environments[C]// Proceedings of the 2023 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2023: 1393-1399. |
| [13] | SHIBATA K, JIMBO T, ODASHIMA T, et al. Learning locally, communicating globally: reinforcement learning of multi-robot task allocation for cooperative transport[J]. IFAC Papers OnLine, 2023, 56(2): 11436-11443. |
| [14] | HO T M, NGUYEN K K, CHERIET M. Federated deep reinforcement learning for task scheduling in heterogeneous autonomous robotic system[J]. IEEE Transactions on Automation Science and Engineering, 2022, 21(1): 528-540. |
| [15] | 张雪锋,卫凯莉,姜文. 一种n维组合混沌映射及性能分析[J]. 西安邮电大学学报, 2020, 25(6): 52-62. |
| ZHANG X F, WEI K L, JIANG W. An n-dimensional combined chaotic mapping and performance analysis[J]. Journal of Xi’an University of Posts and Telecommunications, 2020, 25(6): 52-62. | |
| [16] | 蒋伟进,张婉清,陈萍萍,等. 基于IWOA群智感知中数量敏感的任务分配方法[J]. 电子学报, 2022, 50(10): 2489-2502. |
| JIANG W J, ZHANG W Q, CHEN P P, et al. Quantity sensitive task allocation method based on IWOA swarm intelligence perception[J]. Acta Electronica Sinica, 2022, 50(10): 2489-2502. | |
| [17] | LIU Y, YE Q, ESCRIBANO-MACIAS J, et al. Route planning for last-mile deliveries using mobile parcel lockers: a hybrid Q-learning network approach[J]. Transportation Research Part E: Logistics and Transportation Review, 2023, 177: No.103234. |
| [18] | YU Y, GAO S, CHENG S, et al. CBSO: a memetic brain storm optimization with chaotic local search[J]. Memetic Computing, 2018, 10(4): 353-367. |
| [19] | ROPKE S, PISINGER D.An adaptive large neighborhood search heuristic for the pickup and delivery problem with time windows[J]. Transportation Science, 2006,40(4): 455-472. |
| [1] | Min RAN, Dazhi PAN. Differential evolution algorithm integrating mutation strategy and adjacency information [J]. Journal of Computer Applications, 2026, 46(1): 188-197. |
| [2] | Hengxian TANG, Yuan YAO, Haoxiang KANG. Research and implementation of large-scale unmanned aerial vehicle swarm simulation engine based on container [J]. Journal of Computer Applications, 2025, 45(8): 2704-2711. |
| [3] | Zhichao YUAN, Lei YANG, Jinglin TIAN, Xiaowei WEI, Kangshun LI. Dual-population dual-stage evolutionary algorithm for complex constrained multi-objective optimization problems [J]. Journal of Computer Applications, 2025, 45(8): 2656-2665. |
| [4] | Zhexu LIU, Aobing ZHANG, Zhiyong FAN. Layered solving method for virtual maintenance posture in narrow aircraft space [J]. Journal of Computer Applications, 2025, 45(8): 2694-2703. |
| [5] | Bogan FAN, Shuqing WANG, Kaiyuan CHEN. Small target detection model for UAV aerial photography based on improved YOLOv8 [J]. Journal of Computer Applications, 2025, 45(7): 2342-2350. |
| [6] | Tianyu XUE, Aiping LI, Liguo DUAN. Vehicular edge computing scheme with task offloading and resource optimization [J]. Journal of Computer Applications, 2025, 45(6): 1766-1775. |
| [7] | Ying TAN, Xinyu REN, Chaoli SUN, Sisi WANG. Two-stage infill sampling-based semi-supervised expensive multi-objective optimization algorithm [J]. Journal of Computer Applications, 2025, 45(5): 1605-1612. |
| [8] | Pengcheng XU, Lei HE, Chuan LI, Weiqi QIAN, Tun ZHAO. Deep symbolic regression method based on Transformer [J]. Journal of Computer Applications, 2025, 45(5): 1455-1463. |
| [9] | Bingquan LIN, Lei LIU, Huafeng LI, Chen LIU. Secure cluster control of UAVs under DoS attacks based on APF and DDPG algorithm [J]. Journal of Computer Applications, 2025, 45(4): 1241-1248. |
| [10] | Xingwang WANG, Qingyang ZHANG, Shouyong JIANG, Yongquan DONG. Dynamic UAV path planning based on modified whale optimization algorithm [J]. Journal of Computer Applications, 2025, 45(3): 928-936. |
| [11] | Linbo HU, Zhiwei NI, Jiale CHENG, Wentao LIU, Xuhui ZHU. Collaborative crowdsourcing task allocation method fusing community detection [J]. Journal of Computer Applications, 2025, 45(2): 534-545. |
| [12] | Huahua WANG, Liang HUANG, Jiajie CHEN, Jiening FANG. Dynamic allocation algorithm for multi-beam subcarriers of low orbit satellites based on deep reinforcement learning [J]. Journal of Computer Applications, 2025, 45(2): 571-577. |
| [13] | Jing WANG, Xuming FANG. Intelligent joint power and channel allocation algorithm for Wi-Fi7 multi-link integrated communication and sensing [J]. Journal of Computer Applications, 2025, 45(2): 563-570. |
| [14] | Xiang KUANG, Zhen MA, Wanchun ZHU, Zhi ZHANG, Yunfei CUI. Secure and reliable service function chain deployment based on encoder-decoder structured reinforcement learning [J]. Journal of Computer Applications, 2025, 45(12): 3947-3956. |
| [15] | Hailin XIAO, Bo TIAN, Bin HU, Xiangting KONG, Yuanyuan WU, Renyu MA, Zhongshan ZHANG. Multi-scale small target detection algorithm for UAV perspective based on channel-prior multi-scale cross-axis attention-YOLO [J]. Journal of Computer Applications, 2025, 45(12): 4021-4029. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||