


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (6): 1818-1825.DOI: 10.11772/j.issn.1001-9081.2022050688
所属专题: 人工智能
鲁斌1,2, 柳杰林1,2( )
)
收稿日期:2022-05-13
修回日期:2022-08-05
接受日期:2022-08-08
发布日期:2023-06-08
出版日期:2023-06-10
通讯作者:
柳杰林
作者简介:鲁斌(1975—),男,宁夏银川人,教授,博士,CCF高级会员,主要研究方向:智能计算、计算机视觉、综合能源系统
Bin LU1,2, Jielin LIU1,2()
Received:2022-05-13
Revised:2022-08-05
Accepted:2022-08-08
Online:2023-06-08
Published:2023-06-10
Contact:
Jielin LIU
About author:LU Bin, born in 1975, Ph. D., professor. His research interests include intelligent computing, computer vision, integrated energy systems.
摘要:
为挖掘感知点云几何特征并通过特征增强的方式进一步提高点云语义分割效果,提出了一种基于特征增强的点云语义分割网络。首先,通过设计点云的几何特征感知(GFSOP)模块赋予网络点云局部几何结构的感知能力,捕获点间的空间特征以强化语义表征,并利用分层提取特征思想获得多尺度特征。同时,使用空间注意力和通道注意力融合预测点云语义标签,并通过强化空间关联性和通道依赖性提升分割性能。在室内数据集S3DIS(Stanford large-scale 3D Indoor Spaces)上的实验结果显示,所提网络相较于PointNet++在平均交并比(mIoU)上提升了5.7个百分点,在总体准确度(OA)上提升了3.1个百分点,且在存在噪声、点云密度不均和边界不清晰等问题的点云上表现出更强的泛化性能和更加鲁棒的分割效果。
中图分类号:
鲁斌, 柳杰林. 基于特征增强的三维点云语义分割[J]. 计算机应用, 2023, 43(6): 1818-1825.
Bin LU, Jielin LIU. Semantic segmentation for 3D point clouds based on feature enhancement[J]. Journal of Computer Applications, 2023, 43(6): 1818-1825.
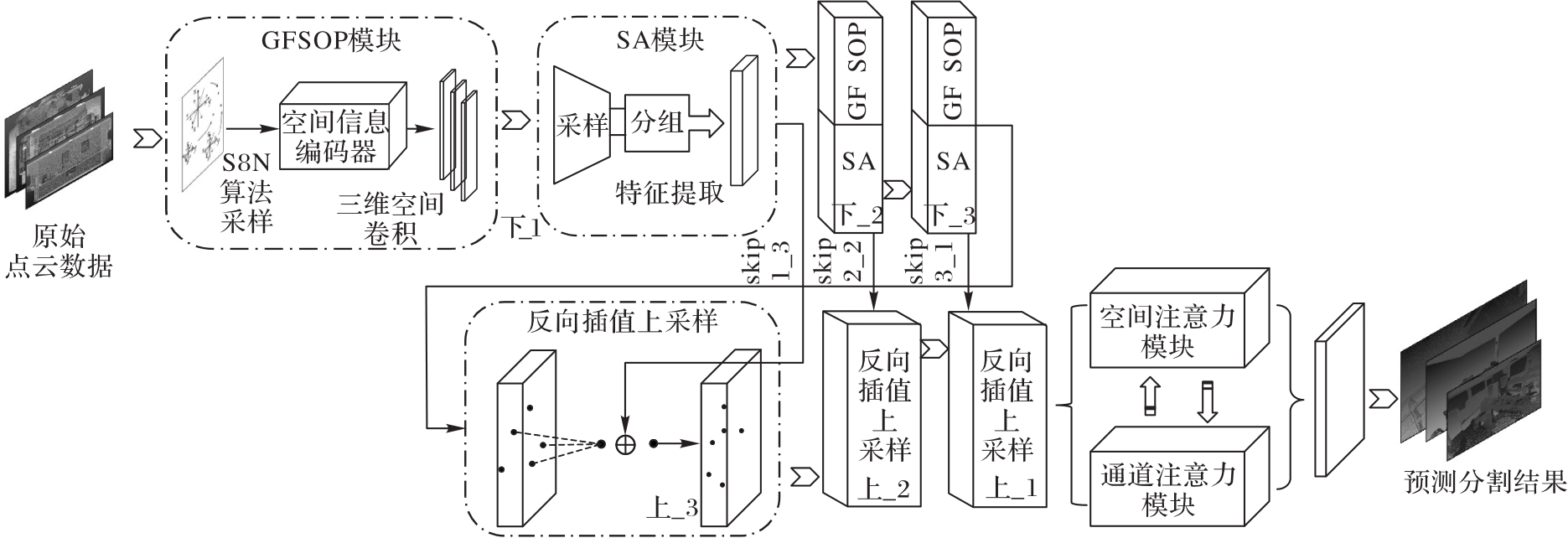
图1 本文网络架构
Fig. 1 Architecture of the proposed network

图2 点云几何关系示意图
Fig.2 Schematic diagram of geometric relationships between point clouds

图3 GFSOP模块结构
Fig. 3 Structure of GFSOP module
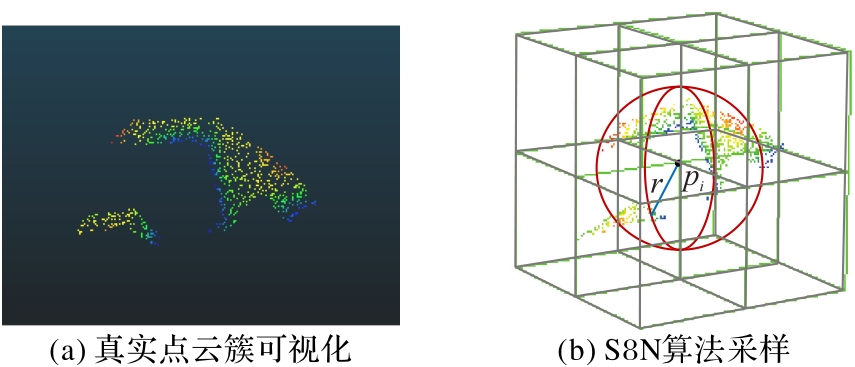
图4 S8N算法采样示意图
Fig. 4 Schematic diagram of S8N algorithm sampling
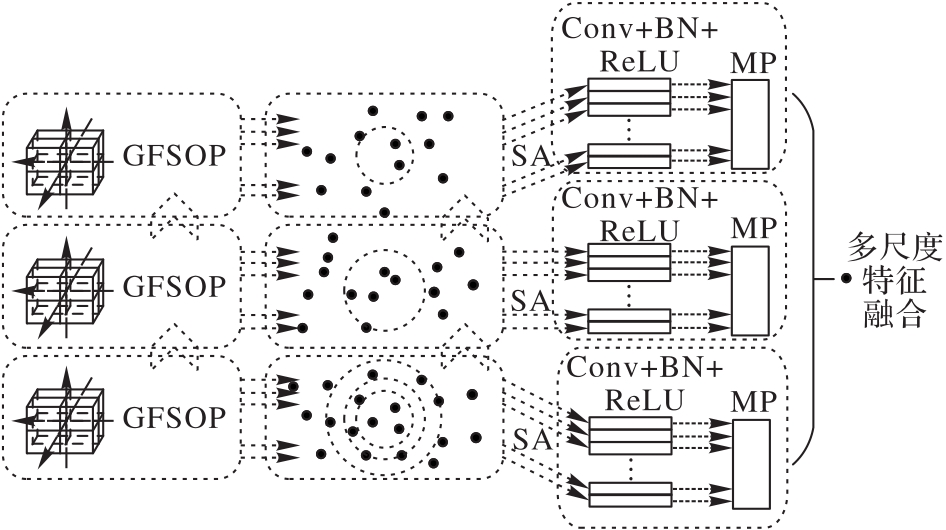
图5 单层组合特征提取结构
Fig. 5 Structure of single-layer combined feature extraction
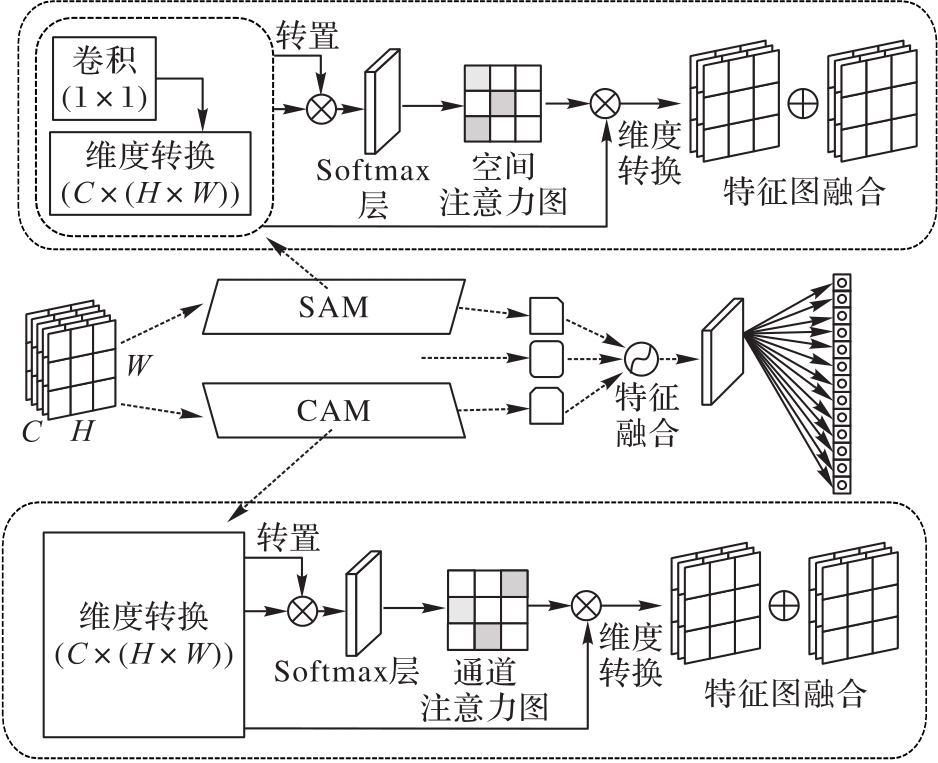
图6 双注意力的融合预测模块结构
Fig. 6 Structure of fusion prediction module with dual attention
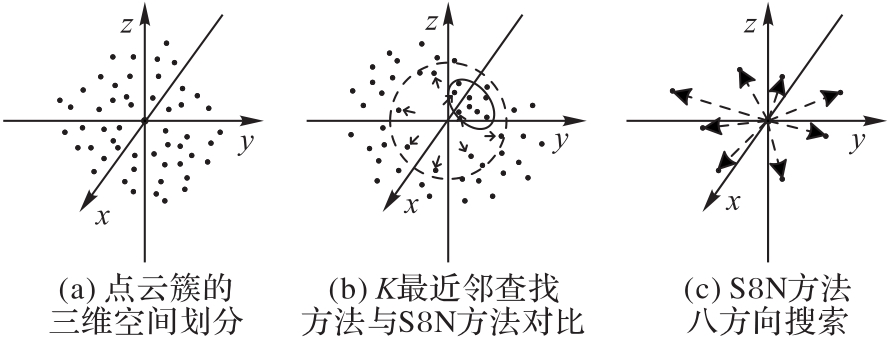
图7 S8N算法的3D表现
Fig. 7 Performance of S8N algorithm in 3D space

图8 优化特征提取模块示意图
Fig. 8 Schematic diagram of optimized feature extraction module
| 网络 | OA | mAcc | mIoU |
|---|---|---|---|
| PointNet | 78.6 | 57.8 | 47.7 |
| PointNet++ | 81.0 | 67.1 | 52.8 |
| RSNet | — | 65.5 | 56.1 |
| DGCNN | 82.7 | — | 56.3 |
| 本文网络 | 84.1 | 71.0 | 58.5 |
表1 S3DIS数据集上的语义分割实验结果 (%)
Tab. 1 Experimental results of semantic segmentation on S3DIS dataset
| 网络 | OA | mAcc | mIoU |
|---|---|---|---|
| PointNet | 78.6 | 57.8 | 47.7 |
| PointNet++ | 81.0 | 67.1 | 52.8 |
| RSNet | — | 65.5 | 56.1 |
| DGCNN | 82.7 | — | 56.3 |
| 本文网络 | 84.1 | 71.0 | 58.5 |
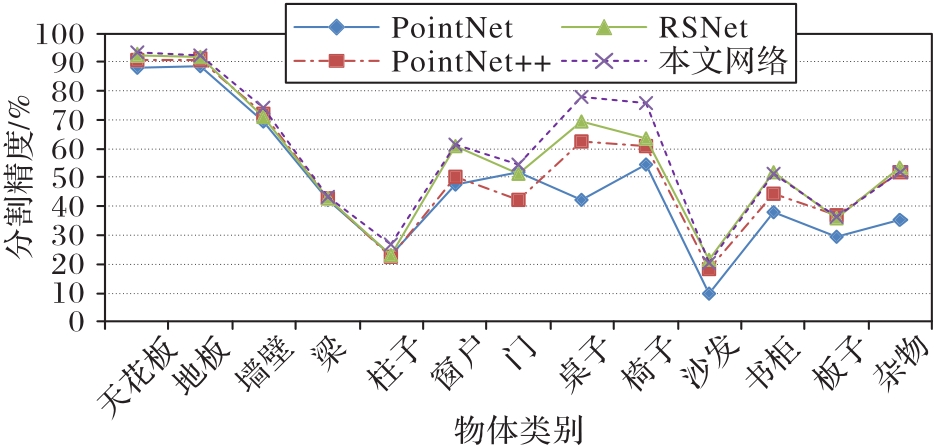
图9 13个类别物体的分割精度对比
Fig. 9 Comparison of segmentation accuracy for thirteen categories of objects

图10 部分语义分割实验结果可视化
Fig. 10 Visualization of some experimental results of semantic segmentation
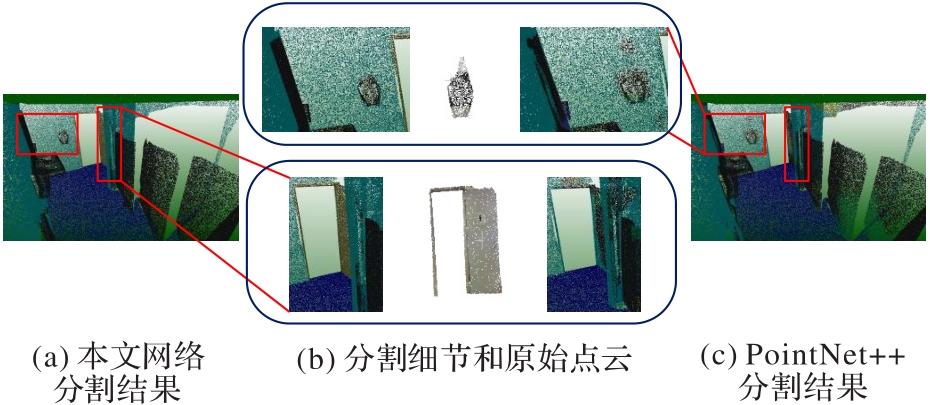
图11 卫生间场景的语义分割对比结果
Fig. 11 Comparative results of semantic segmentation of bathroom scene
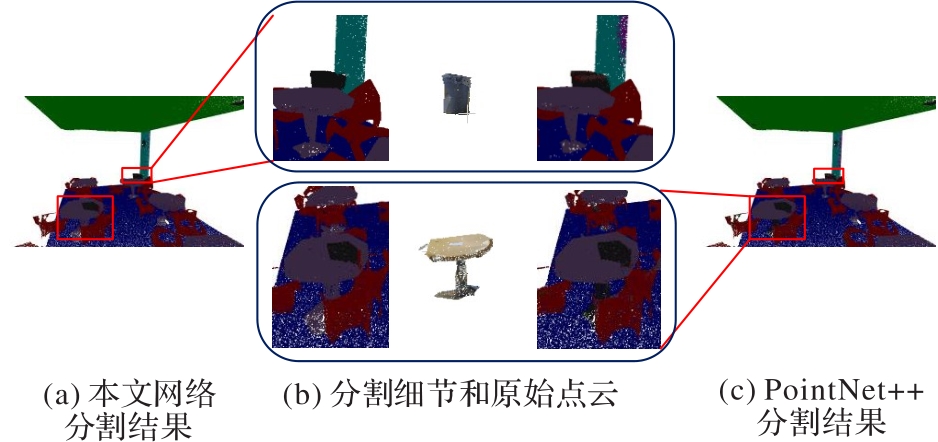
图12 大堂场景的语义分割对比结果
Fig. 12 Comparison results of semantic segmentation of lobby scene
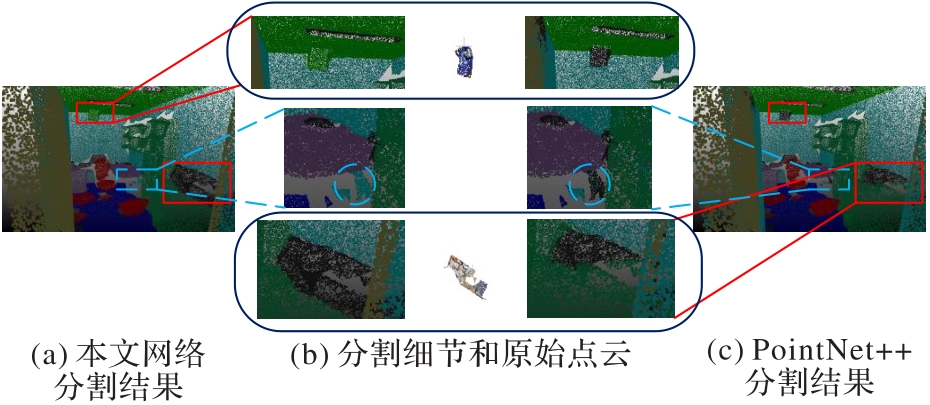
图13 办公室场景的语义分割对比结果
Fig. 13 Comparative results of semantic segmentation of office scene
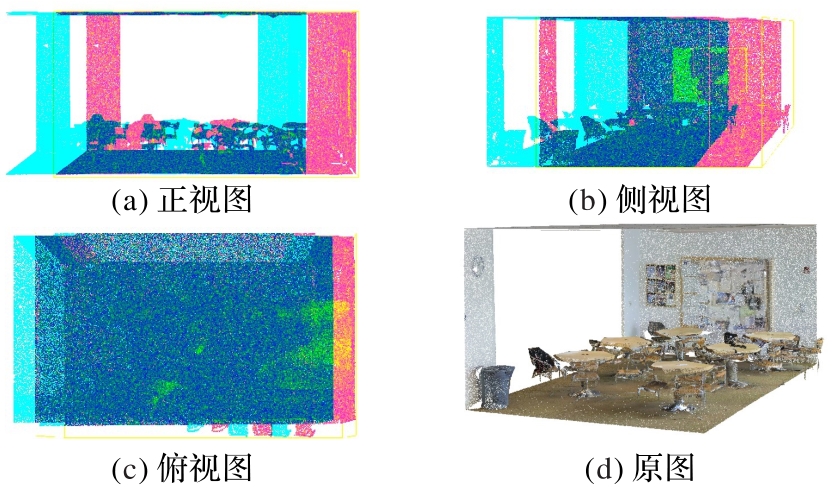
图14 点云立体投影密度三视图
Fig. 14 Three-view drawings of density of point cloud stereo projection
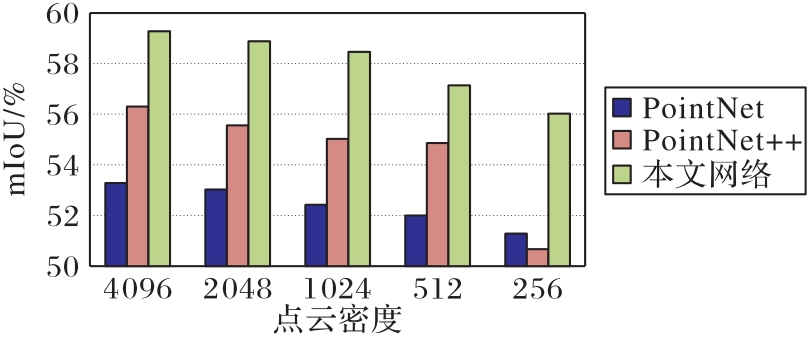
图15 稀疏性实验结果
Fig. 15 Sparsity experimental results
| 方法 | 模块 | mIoU | OA | mAcc |
|---|---|---|---|---|
| PointNet++ | 基准模型 | 56.7 | 84.6 | 71.1 |
| +GFSOP | 添加几何特征感知模块 | 58.6 | 86.4 | 72.6 |
| +SAM | 添加空间注意力模块 | 56.9 | 84.7 | 71.9 |
| +CAM | 添加通道注意力模块 | 57.6 | 85.0 | 72.1 |
| +SCAM | 添加双注意力融合模块 | 57.9 | 86.5 | 73.2 |
| +GFSOP+SCAM | 添加几何特征感知模块、双注意力融合模块 | 60.3 | 87.0 | 73.9 |
表2 不同模块组合的消融实验结果 (%)
Tab. 2 Results of ablation experiments of different module combinations
| 方法 | 模块 | mIoU | OA | mAcc |
|---|---|---|---|---|
| PointNet++ | 基准模型 | 56.7 | 84.6 | 71.1 |
| +GFSOP | 添加几何特征感知模块 | 58.6 | 86.4 | 72.6 |
| +SAM | 添加空间注意力模块 | 56.9 | 84.7 | 71.9 |
| +CAM | 添加通道注意力模块 | 57.6 | 85.0 | 72.1 |
| +SCAM | 添加双注意力融合模块 | 57.9 | 86.5 | 73.2 |
| +GFSOP+SCAM | 添加几何特征感知模块、双注意力融合模块 | 60.3 | 87.0 | 73.9 |
| 1 | 王明军,李乐,易芳,等. 模拟真实水体环境下目标激光点云数据的三维重建与分析[J]. 中国激光, 2022, 49(3): No.0309001. 10.3788/CJL202249.0309001 |
| WANG M J, LI L, YI F, et al. Three-dimensional reconstruction and analysis of target laser point cloud data in simulated real water environment[J]. Chinese Journal of Lasers, 2022, 49(3): No.0309001. 10.3788/CJL202249.0309001 | |
| 2 | 缪永伟,刘家宗,孙瑜亮,等. 基于类别-实例分割的室内点云场景修复补全[J]. 计算机学报, 2021, 44(11): 2189-2202. 10.11897/SP.J.1016.2021.02189 |
| MIAO Y W, LIU J Z, SUN Y L, et al. Point cloud completion of indoor scenes based on category-instance segmentation [J]. Chinese Journal of Computers, 2021, 44(11): 2189-2202. 10.11897/SP.J.1016.2021.02189 | |
| 3 | 秦庭威,赵鹏程,秦品乐,等. 基于残差注意力机制的点云配准算法[J]. 计算机应用, 2022, 42(7): 2184-2191. |
| QIN T W, ZHAO P C, QIN P L, et al. Point cloud registration algorithm based on residual attention mechanism[J]. Journal of Computer Applications, 2022, 42(7): 2184-2191. | |
| 4 | MI X X, YANG B S, CHEN C, et al. Automatic road structure detection and vectorization using MLS point clouds[J]. The International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 2019, XLII-2/W13: 1069-1075. 10.5194/isprs-archives-xlii-2-w13-1069-2019 |
| 5 | WU Y C, RIVENSON Y, ZHANG Y B, et al. Extended depth-of-field in holographic imaging using deep-learning-based autofocusing and phase recovery [J]. Optica, 2018, 5(6): 704-710. 10.1364/optica.5.000704 |
| 6 | CHEN H, LIANG M, LIU W Q, et al. An approach to boundary detection for 3D point clouds based on DBSCAN clustering[J]. Pattern Recognition, 2022, 124: No.108431. 10.1016/j.patcog.2021.108431 |
| 7 | GHAHREMANI M, WILLIAMS K, CORKE F, et al. Direct and accurate feature extraction from 3D point clouds of plants using RANSAC[J]. Computers and Electronics in Agriculture, 2021, 187: No.106240. 10.1016/j.compag.2021.106240 |
| 8 | BUI M, CHANG L C, LIU H, et al. Comparative study of 3D point cloud compression methods[C]// Proceedings of the 2021 IEEE International Conference on Big Data. Piscataway: IEEE, 2021: 5859-5861. 10.1109/bigdata52589.2021.9671822 |
| 9 | LI Y Y, BU R, SUN M C, et al. PointCNN: convolution on Χ-transformed points[C]// Proceedings of the 32nd International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2018: 828-838. |
| 10 | ANGULO V, RODRIGUEZ J, GAONA E, et al. A supervoxel-based approach for leaves segmentation of potato plants from point clouds[C]// Proceedings of the 2020 IEEE International Geoscience and Remote Sensing Symposium. Piscataway: IEEE, 2020: 4902-4905. 10.1109/igarss39084.2020.9324365 |
| 11 | ZHOU H Y, LIU A A, NIE W Z, et al. Multi-view saliency guided deep neural network for 3-D object retrieval and classification[J]. IEEE Transactions on Multimedia, 2020, 22(6): 1496-1506. 10.1109/tmm.2019.2943740 |
| 12 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. 10.1109/cvpr.2017.16 |
| 13 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook, NY: Curran Associates Inc., 2017: 5105-5114. |
| 14 | WU W, QI Z, LI F X. PointConv: deep convolutional networks on 3D point clouds[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 9621-9630. 10.1109/cvpr.2019.00985 |
| 15 | LU Q, CHEN C, XIE W J, et al. PointNGCNN: deep convolutional networks on 3D point clouds with neighborhood graph filters [J]. Computers and Graphics, 2020, 86: 42-51. 10.1016/j.cag.2019.11.005 |
| 16 | LI J X, CHEN B M, LEE G H. SO-Net: self-organizing network for point cloud analysis[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 9397-9406. 10.1109/cvpr.2018.00979 |
| 17 | LIU T, YANG Z H, HU S J, et al. Neighbor reweighted local centroid for geometric feature identification[J]. IEEE Transactions on Visualization and Computer Graphics, 2023, 29(2): 1545-1558. 10.1109/tvcg.2021.3124911 |
| 18 | JIANG M Y, WU Y R, ZHAO T Q, et al. PointSIFT: a SIFT-like network module for 3D point cloud semantic segmentation[EB/OL]. (2018-11-24) [2022-05-02].. 10.1145/3503161.3548251 |
| 19 | FU J, LIU J, TIAN H J, et al. Dual attention network for scene segmentation [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 3141-3149. 10.1109/cvpr.2019.00326 |
| 20 | ARMENI I, SENER O, ZAMIR A R, et al. 3D semantic parsing of large-scale indoor spaces[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 1534-1543. 10.1109/cvpr.2016.170 |
| [1] | 赵志强, 马培红, 黑新宏. 基于双重注意力机制的人群计数方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2886-2892. |
| [2] | 秦璟, 秦志光, 李发礼, 彭悦恒. 基于概率稀疏自注意力神经网络的重性抑郁疾患诊断[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2970-2974. |
| [3] | 李力铤, 华蓓, 贺若舟, 徐况. 基于解耦注意力机制的多变量时序预测模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2732-2738. |
| [4] | 薛凯鹏, 徐涛, 廖春节. 融合自监督和多层交叉注意力的多模态情感分析网络[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2387-2392. |
| [5] | 汪雨晴, 朱广丽, 段文杰, 李书羽, 周若彤. 基于交互注意力机制的心理咨询文本情感分类模型[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2393-2399. |
| [6] | 高鹏淇, 黄鹤鸣, 樊永红. 融合坐标与多头注意力机制的交互语音情感识别[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2400-2406. |
| [7] | 李钟华, 白云起, 王雪津, 黄雷雷, 林初俊, 廖诗宇. 基于图像增强的低照度人脸检测[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2588-2594. |
| [8] | 莫尚斌, 王文君, 董凌, 高盛祥, 余正涛. 基于多路信息聚合协同解码的单通道语音增强[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2611-2617. |
| [9] | 熊武, 曹从军, 宋雪芳, 邵云龙, 王旭升. 基于多尺度混合域注意力机制的笔迹鉴别方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2225-2232. |
| [10] | 李欢欢, 黄添强, 丁雪梅, 罗海峰, 黄丽清. 基于多尺度时空图卷积网络的交通出行需求预测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2065-2072. |
| [11] | 毛典辉, 李学博, 刘峻岭, 张登辉, 颜文婧. 基于并行异构图和序列注意力机制的中文实体关系抽取模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2018-2025. |
| [12] | 刘丽, 侯海金, 王安红, 张涛. 基于多尺度注意力的生成式信息隐藏算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2102-2109. |
| [13] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [14] | 李大海, 王忠华, 王振东. 结合空间域和频域信息的双分支低光照图像增强网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2175-2182. |
| [15] | 魏文亮, 王阳萍, 岳彪, 王安政, 张哲. 基于光照权重分配和注意力的红外与可见光图像融合深度学习模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2183-2191. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||