《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (S2): 157-162.DOI: 10.11772/j.issn.1001-9081.2022121853
• 多媒体计算与计算机仿真 • 上一篇
Shuang LI1,2, Yue ZHOU2( ), Xin ZHANG2, Meng ZHANG2
), Xin ZHANG2, Meng ZHANG2
摘要:
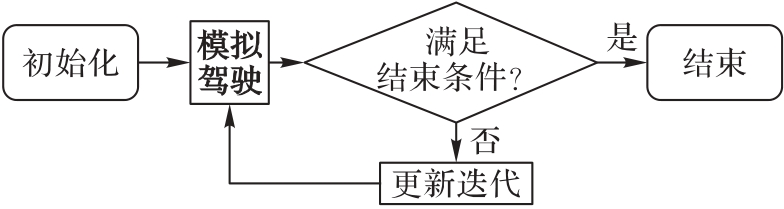
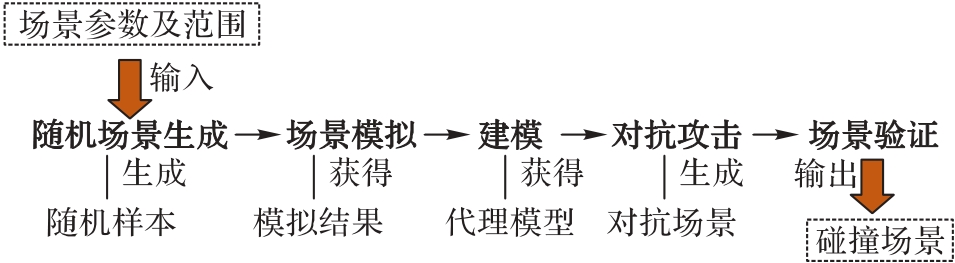
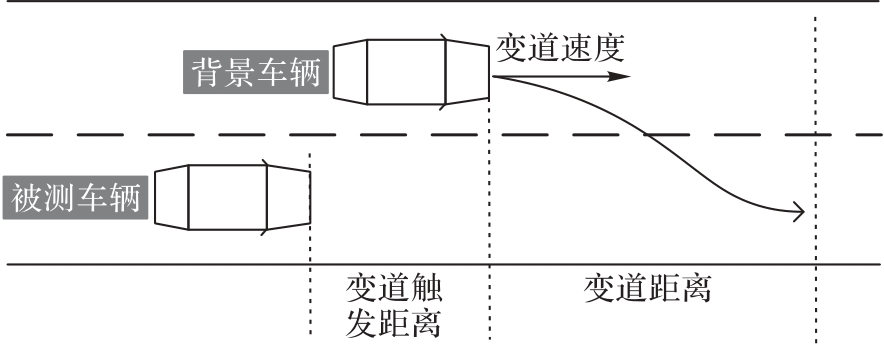
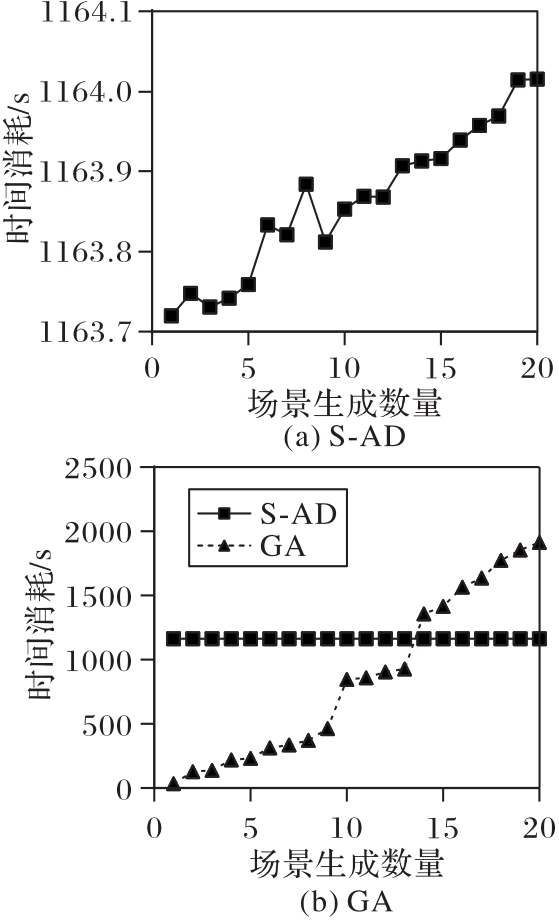
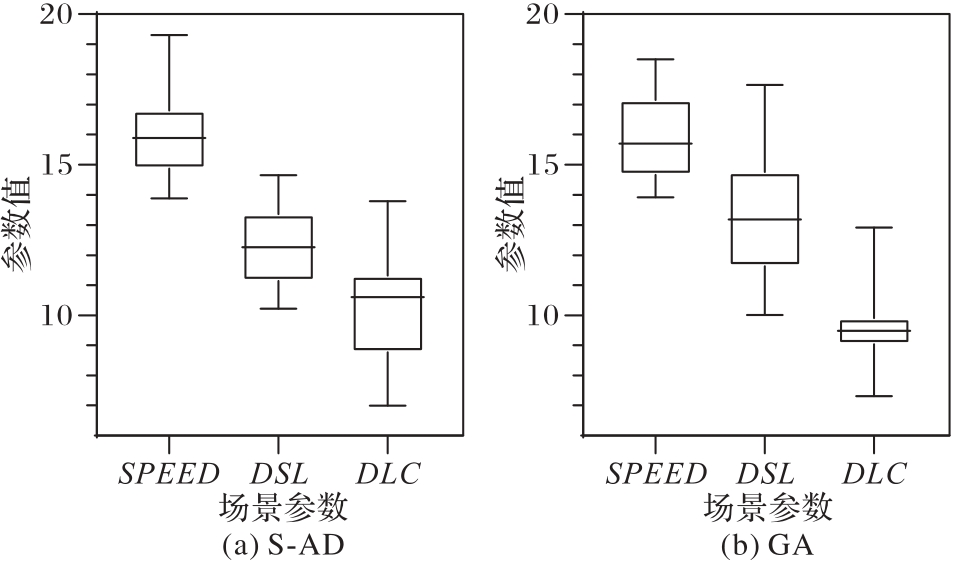
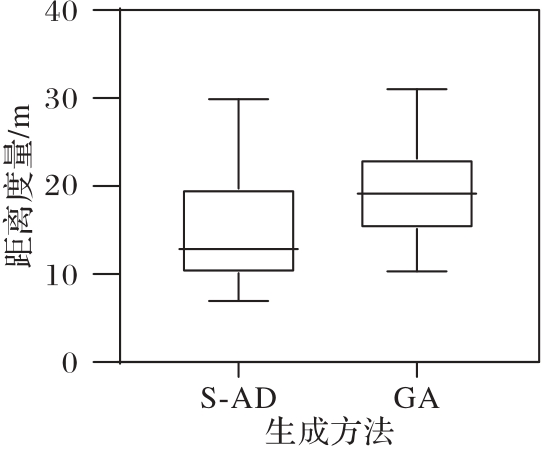
针对自动驾驶关键场景生成耗时长和容易生成大量极端场景的问题,提出一种面向效率和多样性的自动驾驶关键场景生成方法S-AD(Surrogate model-ADversarial example)。首先利用参数随机生成一批随机场景,通过模拟驾驶获得自动驾驶系统(ADS)在随机场景中的驾驶结果;接着根据随机场景和驾驶结果训练代理模型;随后使用对抗样本生成算法对代理模型发起攻击,生成代理模型认为能引发ADS碰撞的对抗场景;最后通过模拟驾驶对抗场景进行验证,确实能引发ADS碰撞的对抗场景为生成的关键场景。与当前研究较多的基于遗传算法的关键场景生成方法(GA)对比,S-AD在获得代理模型后(平均需要1 163.7 s)生成一个关键场景平均仅需要0.084 s,而GA需要95.12 s,在生成13个以上的场景时,S-AD的时间消耗远少于GA;针对切入场景中的变道距离(DLC)参数,S-AD生成的DLC有75%分布在8.5~11.5 m,而GA生成的DLC有75%集中在9~10 m,S-AD生成的场景多样性更好;在与非碰撞场景的距离上,75%的S-AD场景分布在10~20 m,75%的GA场景分布在15~23 m,GA生成的场景更加极端。实验结果表明,S-AD在生成效率、场景多样性和非极端性上要优于对比的GA方法。
中图分类号: