《计算机应用》唯一官方网站 ›› 2022, Vol. 42 ›› Issue (1): 252-257.DOI: 10.11772/j.issn.1001-9081.2021010175
张瑞, 张奇志( ), 周亚丽
), 周亚丽
Rui ZHANG, Qizhi ZHANG(), Yali ZHOU
摘要:
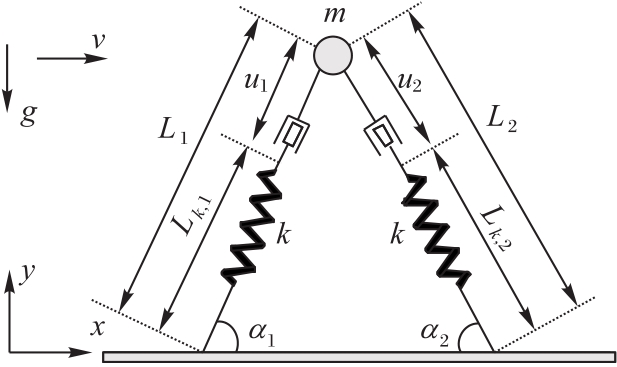
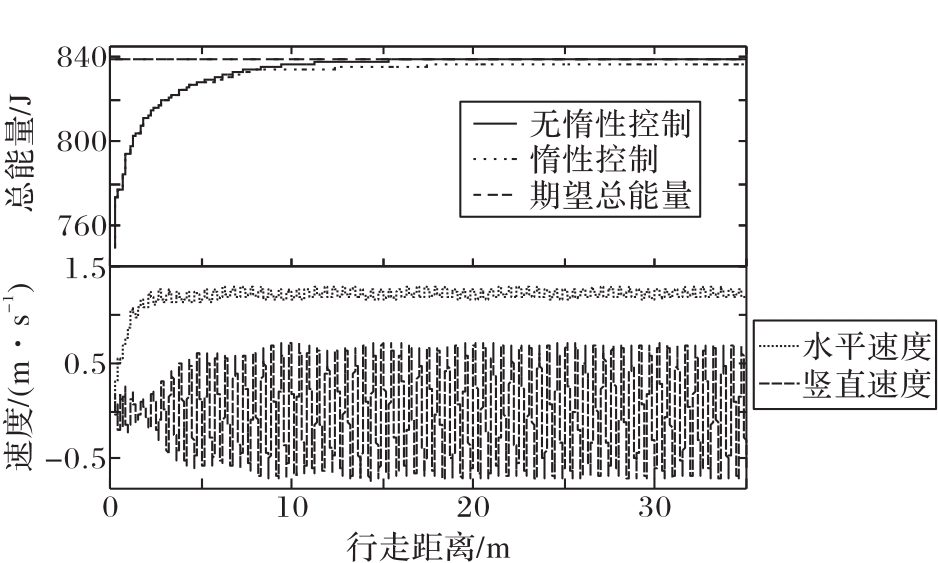
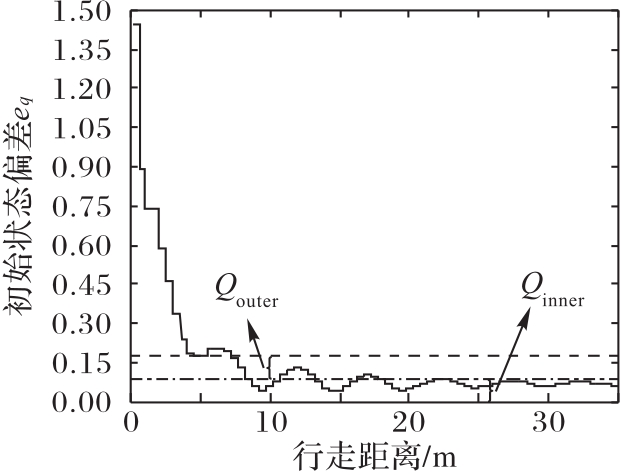
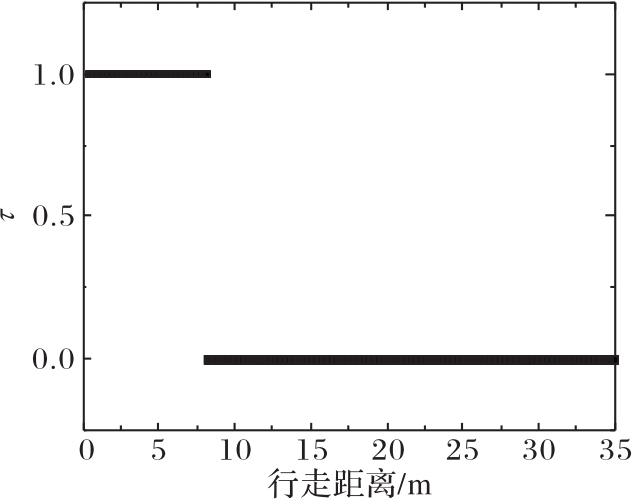
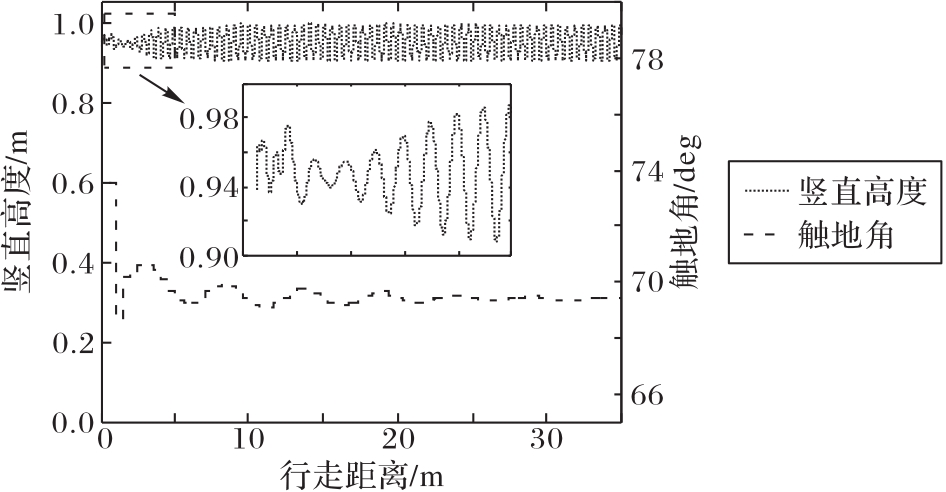
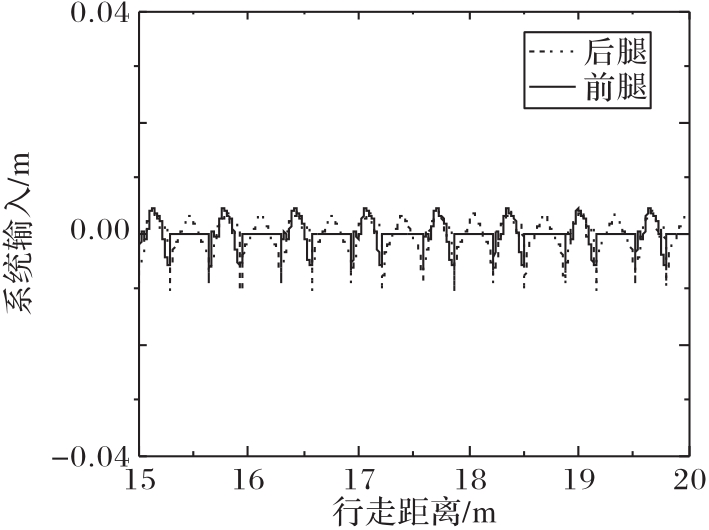
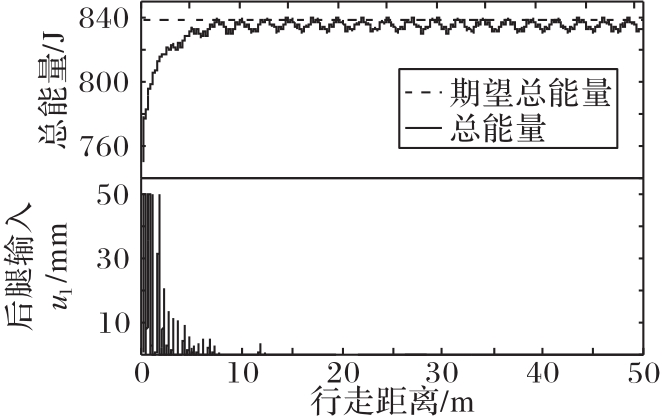
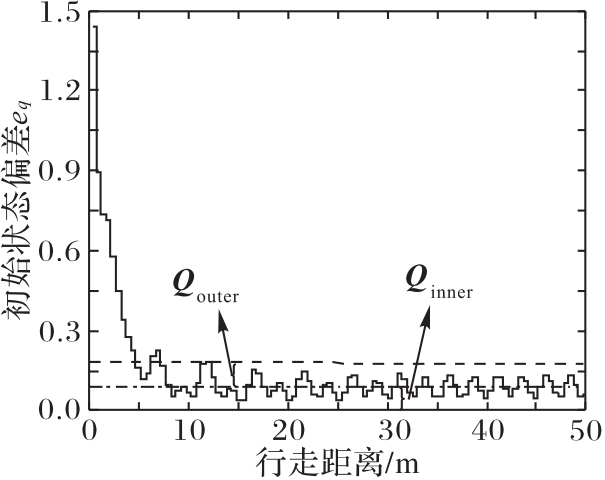
传统双足机器人行走使用轨迹跟踪控制,而人类行走大部分时间处于被动状态。针对半被动变长度弹性伸缩腿双足机器人从静止状态开始起步行走的问题,提出了一种起步行走仿人控制方法。首先,使用串联弹性驱动双足弹簧负载倒立摆(B-SLIP)模型;然后,利用拉格朗日方法建立行走动力学方程,并利用模型的自稳定性在双支撑阶段采用能量误差比例积分(PI)反馈控制与惰性控制方法控制后腿伸缩,在单支撑阶段采用摆动腿回摆方法控制机器人的高度和前向速度。仿真结果表明,所提出的控制策略可使双足机器人在水平面上实现起步行走过程,并且对应的控制系统对于外部周期扰动力具有抗干扰能力。
中图分类号: