


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (5): 1625-1635.DOI: 10.11772/j.issn.1001-9081.2022040541
所属专题: 前沿与综合应用
王先兰1, 周金坤1, 穆楠2, 王晨3( )
)
收稿日期:2022-04-18
修回日期:2022-07-04
接受日期:2022-07-05
发布日期:2022-08-12
出版日期:2023-05-10
通讯作者:
王晨
作者简介:王先兰(1969—),女,湖北荆州人,高级工程师,主要研究方向:人工智能、数据通信基金资助:
Xianlan WANG1, Jinkun ZHOU1, Nan MU2, Chen WANG3()
Received:2022-04-18
Revised:2022-07-04
Accepted:2022-07-05
Online:2022-08-12
Published:2023-05-10
Contact:
Chen WANG
About author:WANG Xianlan, born in 1969, senior engineer. Her research interests include artificial intelligence, data communication.Supported by:摘要:
针对现有跨视角地理定位方法中视点不变特征与视角转换方法割裂导致的性能提升瓶颈问题,提出多任务联合学习模型(MJLM)。MJLM由前置图像生成模型和后置图像检索模型组成。前置生成模型首先使用逆透视映射(IPM)进行坐标变换,显式地弥合空间域差,使投影图像与真实卫星图的空间几何特征大致相同;然后通过提出的跨视角生成对抗网络(CVGAN)隐式地对图像内容及纹理进行细粒度的匹配和修复,并合成出更平滑且真实的卫星图像。后置检索模型由多视角多监督网络(MMNet)构成,能够兼顾多尺度特征和多监督学习的图像检索任务。在University-1652(无人机定位数据集)上进行实验,结果显示MJLM对无人机(UAV)定位任务的平均精确率(AP)及召回率(R@1)分别达到89.22%和87.54%,与LPN (Local Pattern Network)和MSBA (MultiScale Block Attention)相比,MJLM在R@1上分别提升了15.29%和1.07%。可见,MJLM能在一个聚合框架体系内联合处理跨视角图像生成任务及检索任务,实现基于视角转换与视点不变特征方法的融合,有效提升跨视角地理定位的精度和鲁棒性,验证UAV定位的可行性。
中图分类号:
王先兰, 周金坤, 穆楠, 王晨. 基于多任务联合学习的跨视角地理定位方法[J]. 计算机应用, 2023, 43(5): 1625-1635.
Xianlan WANG, Jinkun ZHOU, Nan MU, Chen WANG. Cross-view geo-localization method based on multi-task joint learning[J]. Journal of Computer Applications, 2023, 43(5): 1625-1635.
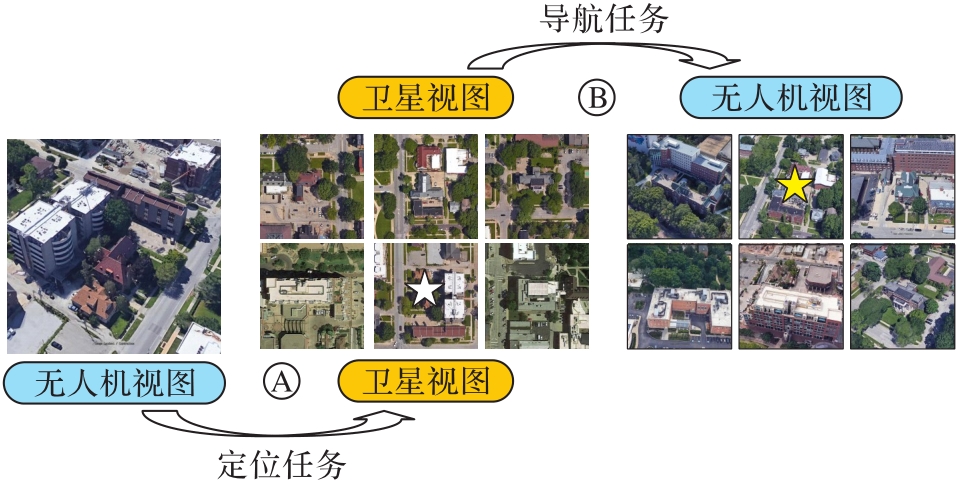
图1 无人机图像定位和导航任务示意图
Fig. 1 Schematic diagram of UAV image localization and navigation tasks
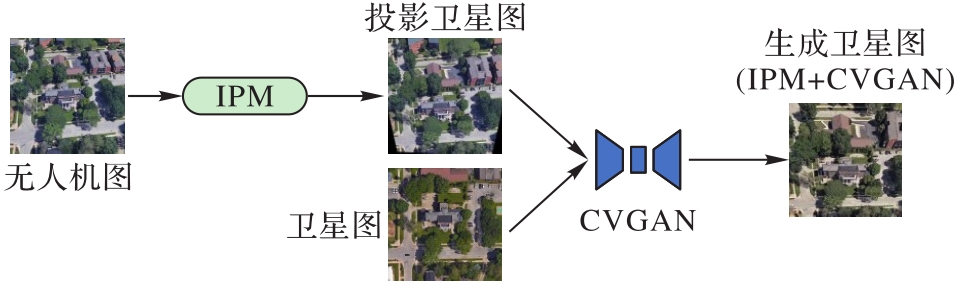
图2 基于视角转换的前置图像生成模型
Fig. 2 Proactive image generation model based on view transformation
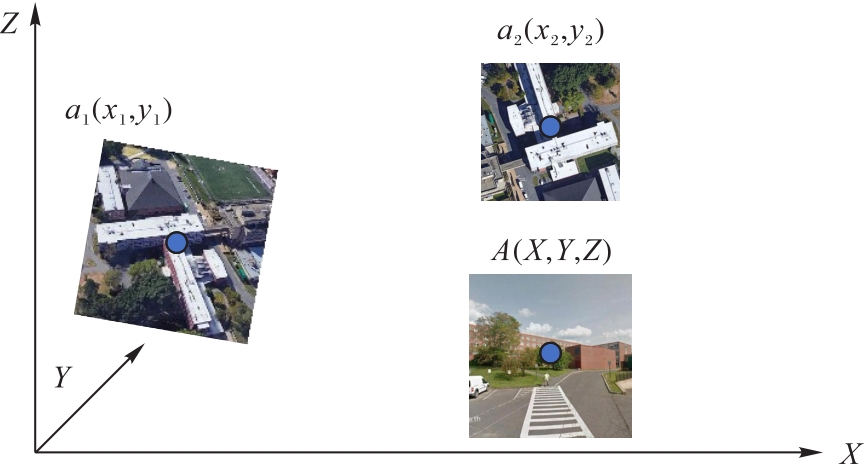
图3 无人机定位场景的IPM示意图
Fig. 3 Schematic diagram of IPM of UAV localization scene
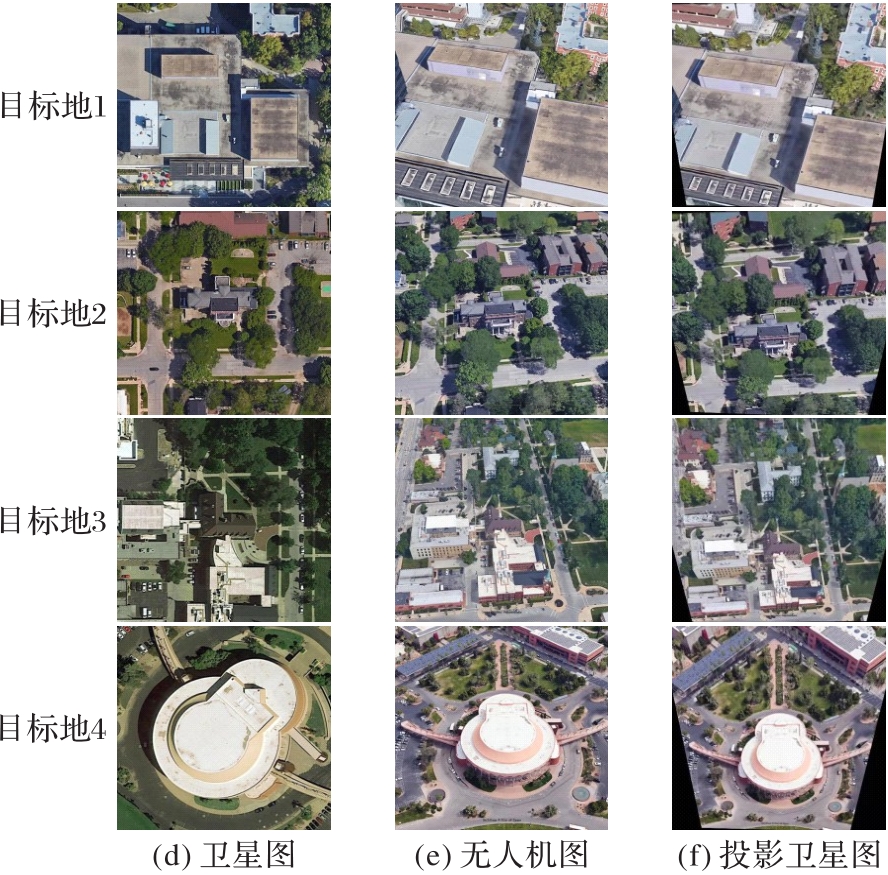
图4 基于IPM的坐标转换效果图
Fig. 4 Effect diagram of coordinate transformation based on IPM

图5 生成器架构示意图
Fig. 5 Schematic diagram of generator architecture
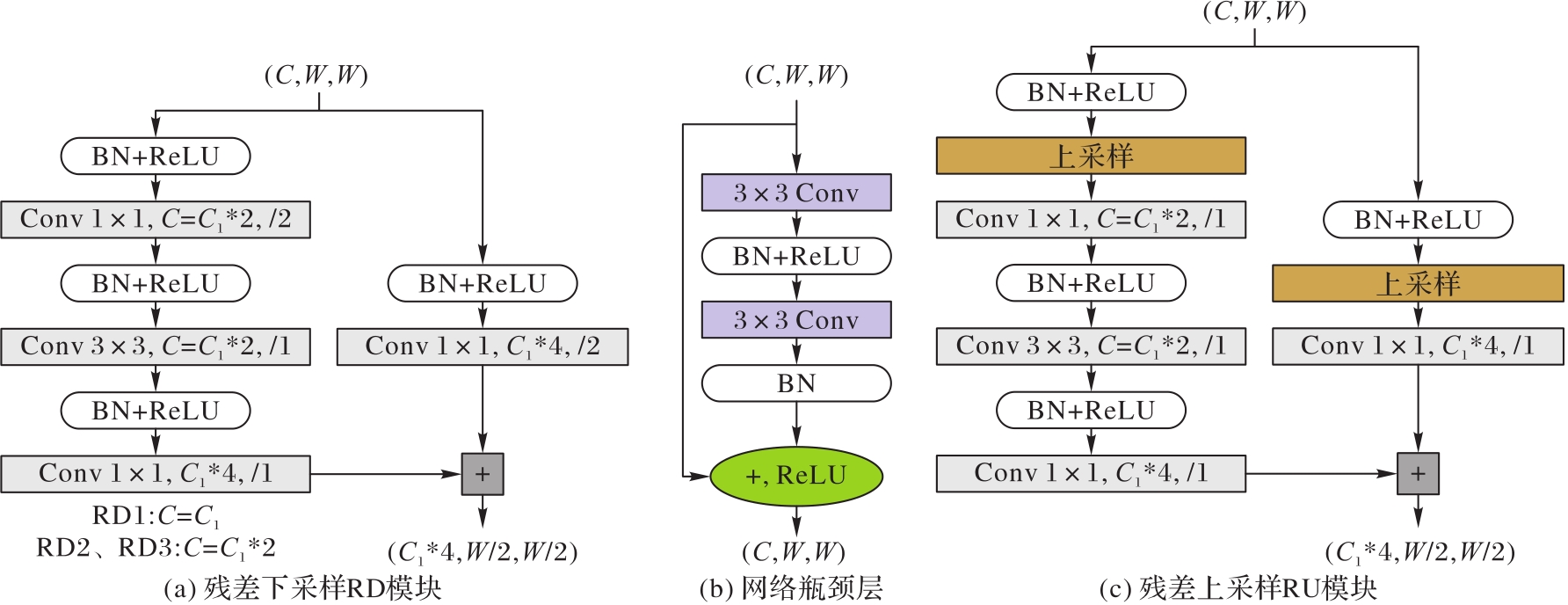
图6 生成器网络细节示意图
Fig.6 Schematic diagram of generator details
| 参数名称 | 输出特征尺寸 |
|---|---|
| 3, 256, 256 | |
| 1×1 Conv | 32, 256, 256 |
| (enc1) 残差下采样模块RD1 | 128, 128, 128 |
| (enc2) 残差下采样模块RD2 | 256, 64, 64 |
| (enc3) 残差下采样模块RD3 | 512, 32, 32 |
| 网络瓶颈层×6 | 512, 32, 32 |
| +嵌合 (enc3)残差上采样模块RU1 | 256, 64, 64 |
| +嵌合 (enc2)自注意力模块 | 512, 64, 64 |
| 残差上采样模块RU2 | 128 128, 128 |
| +嵌合 (enc1)残差上采样模块RU3 | 32, 256, 256 |
| 3×3 Conv + Tanh | 3, 256, 256 |
表1 生成器网络结构参数
Tab. 1 Network structure parameters of generator
| 参数名称 | 输出特征尺寸 |
|---|---|
| 3, 256, 256 | |
| 1×1 Conv | 32, 256, 256 |
| (enc1) 残差下采样模块RD1 | 128, 128, 128 |
| (enc2) 残差下采样模块RD2 | 256, 64, 64 |
| (enc3) 残差下采样模块RD3 | 512, 32, 32 |
| 网络瓶颈层×6 | 512, 32, 32 |
| +嵌合 (enc3)残差上采样模块RU1 | 256, 64, 64 |
| +嵌合 (enc2)自注意力模块 | 512, 64, 64 |
| 残差上采样模块RU2 | 128 128, 128 |
| +嵌合 (enc1)残差上采样模块RU3 | 32, 256, 256 |
| 3×3 Conv + Tanh | 3, 256, 256 |
| 参数名称 | 输出特征尺寸 |
|---|---|
| 3, 256, 256 | |
| 4×4 Conv + LeakyReLU(0.2) | 64, 128, 128 |
| 4×4 Conv + LeakyReLU(0.2) | 128, 64, 64 |
| 非局部自注意力模块 | 128, 64, 64 |
| 4×4 Conv + LeakyReLU(0.2) | 256, 32, 32 |
| 4×4 Conv + LeakyReLU(0.2) | 512, 32, 32 |
| 4×4 Conv | 1, 32, 32 |
表2 判别器网络结构参数
Tab. 2 Network structure parameters of discriminator
| 参数名称 | 输出特征尺寸 |
|---|---|
| 3, 256, 256 | |
| 4×4 Conv + LeakyReLU(0.2) | 64, 128, 128 |
| 4×4 Conv + LeakyReLU(0.2) | 128, 64, 64 |
| 非局部自注意力模块 | 128, 64, 64 |
| 4×4 Conv + LeakyReLU(0.2) | 256, 32, 32 |
| 4×4 Conv + LeakyReLU(0.2) | 512, 32, 32 |
| 4×4 Conv | 1, 32, 32 |

图7 MJLM架构示意图
Fig. 7 Schematic diagram of MJLM architecture

图8 University-1652数据集图像示例
Fig. 8 Samples of images from University-1652 dataset
| 方法 | 骨干网络 | 无人机→卫星 | 卫星→无人机 | ||
|---|---|---|---|---|---|
| R@1 | AP | R@1 | AP | ||
| ORB[ | — | 11.31 | 19.36 | 28.46 | 30.12 |
| SIFT[ | — | 21.47 | 29.47 | 41.57 | 35.43 |
| SURF[ | — | 19.69 | 36.29 | 45.26 | 34.13 |
| 加权软边界三元组损失[ | VGG16 | 53.21 | 58.03 | 65.62 | 54.47 |
| 实例损失[ | ResNet-50 | 58.23 | 62.91 | 74.47 | 59.45 |
| LCM[ | ResNet-50 | 66.65 | 70.82 | 79.89 | 65.38 |
| SFPN[ | ResNet-50 | 70.83 | 77.36 | 80.26 | 71.58 |
| LPN[ | ResNet-50 | 75.93 | 79.14 | 86.45 | 74.79 |
| PCL[ | ResNet-50 | 83.27 | 87.32 | 91.78 | 82.18 |
| MMNet[ | ResNet-50 | 83.97 | 86.96 | 90.15 | 84.69 |
| FSRA[ | Vit-S | 85.50 | 87.53 | 89.73 | 84.94 |
| MSBA[ | ResNet-50 | 86.61 | 88.55 | 92.15 | 84.45 |
| IPM+CVGAN+LPN | ResNet-50 | 81.58 | 85.45 | — | — |
| MJLM | ResNet-50 | 87.54 | 89.22 | — | — |
表3 University-1652数据集上MJLM与前沿方法的性能比较 ( %)
Tab. 3 Performance comparison between MJLM and state-of-the-art methods on University-1652 dataset
| 方法 | 骨干网络 | 无人机→卫星 | 卫星→无人机 | ||
|---|---|---|---|---|---|
| R@1 | AP | R@1 | AP | ||
| ORB[ | — | 11.31 | 19.36 | 28.46 | 30.12 |
| SIFT[ | — | 21.47 | 29.47 | 41.57 | 35.43 |
| SURF[ | — | 19.69 | 36.29 | 45.26 | 34.13 |
| 加权软边界三元组损失[ | VGG16 | 53.21 | 58.03 | 65.62 | 54.47 |
| 实例损失[ | ResNet-50 | 58.23 | 62.91 | 74.47 | 59.45 |
| LCM[ | ResNet-50 | 66.65 | 70.82 | 79.89 | 65.38 |
| SFPN[ | ResNet-50 | 70.83 | 77.36 | 80.26 | 71.58 |
| LPN[ | ResNet-50 | 75.93 | 79.14 | 86.45 | 74.79 |
| PCL[ | ResNet-50 | 83.27 | 87.32 | 91.78 | 82.18 |
| MMNet[ | ResNet-50 | 83.97 | 86.96 | 90.15 | 84.69 |
| FSRA[ | Vit-S | 85.50 | 87.53 | 89.73 | 84.94 |
| MSBA[ | ResNet-50 | 86.61 | 88.55 | 92.15 | 84.45 |
| IPM+CVGAN+LPN | ResNet-50 | 81.58 | 85.45 | — | — |
| MJLM | ResNet-50 | 87.54 | 89.22 | — | — |

图9 无人机定位任务结果图
Fig. 9 Result graphs of UAV localization tasks
| 模型 | RMSE(↓) | SSIM(↑) | PSNR(↑) | SD(↑) |
|---|---|---|---|---|
| Ips vs Is (i.) | 49.154 | 0.459 | 19.546 | 16.421 |
| w/o R (ii.) | 39.638 | 0.799 | 30.232 | 31.678 |
| w / LPN (iii.) | 39.304 | 0.816 | 30.644 | 31.824 |
| w / MMNet (iv.) | 39.289 | 0.821 | 30.651 | 31.815 |
表4 University-1652数据集上前置图像生成模型的消融实验结果
Tab. 4 Ablation study results of proactive image generation model on University-1652 dataset
| 模型 | RMSE(↓) | SSIM(↑) | PSNR(↑) | SD(↑) |
|---|---|---|---|---|
| Ips vs Is (i.) | 49.154 | 0.459 | 19.546 | 16.421 |
| w/o R (ii.) | 39.638 | 0.799 | 30.232 | 31.678 |
| w / LPN (iii.) | 39.304 | 0.816 | 30.644 | 31.824 |
| w / MMNet (iv.) | 39.289 | 0.821 | 30.651 | 31.815 |
| 模型 | 无人机→卫星 | |||
|---|---|---|---|---|
| R@1 | R@5 | R@10 | AP | |
| MMNet | 83.97 | 88.84 | 93.29 | 86.96 |
| w/o IPM(i.) | 85.73. | 90.63 | 95.10 | 87.85 |
| w/o G&D(ii.) | 85.42 | 90.85 | 95.77 | 87.33 |
| w/o | 86.95 | 91.71 | 96.46 | 88.81 |
| w/ | 86.53 | 91.18 | 96.01 | 88.74 |
| MJLM | 87.54 | 92.33 | 96.95 | 89.22 |
表5 University-1652数据集上后置图像检索模型的消融实验结果单位: % ( %)
Tab. 5 Ablation study results of posterior image retrieval model on University-1652 dataset
| 模型 | 无人机→卫星 | |||
|---|---|---|---|---|
| R@1 | R@5 | R@10 | AP | |
| MMNet | 83.97 | 88.84 | 93.29 | 86.96 |
| w/o IPM(i.) | 85.73. | 90.63 | 95.10 | 87.85 |
| w/o G&D(ii.) | 85.42 | 90.85 | 95.77 | 87.33 |
| w/o | 86.95 | 91.71 | 96.46 | 88.81 |
| w/ | 86.53 | 91.18 | 96.01 | 88.74 |
| MJLM | 87.54 | 92.33 | 96.95 | 89.22 |
| 距离 | 无人机→卫星 | |
|---|---|---|
| R@1 | AP | |
| 全部 | 87.54 | 89.22 |
| 短 | 87.75 | 89.59 |
| 中 | 88.99 | 91.84 |
| 长 | 85.97 | 87.87 |
表6 University-1652数据集上拍摄距离对定位性能的影响 ( %)
Tab. 6 Influence of shooting distance on localization performance on University-1652 dataset
| 距离 | 无人机→卫星 | |
|---|---|---|
| R@1 | AP | |
| 全部 | 87.54 | 89.22 |
| 短 | 87.75 | 89.59 |
| 中 | 88.99 | 91.84 |
| 长 | 85.97 | 87.87 |
| 偏移像素 | 无人机→卫星 | |
|---|---|---|
| R@1 | AP | |
| 0 | 87.54 | 89.22 |
| 10 | 87.19 | 88.93 |
| 20 | 85.70 | 86.75 |
| 30 | 84.57 | 85.11 |
| 40 | 81.21 | 81.00 |
| 50 | 76.92 | 77.44 |
表7 University-1652数据集上偏移不变性的验证结果 ( %)
Tab. 7 Verification results of offset-invariance on University-1652 dataset
| 偏移像素 | 无人机→卫星 | |
|---|---|---|
| R@1 | AP | |
| 0 | 87.54 | 89.22 |
| 10 | 87.19 | 88.93 |
| 20 | 85.70 | 86.75 |
| 30 | 84.57 | 85.11 |
| 40 | 81.21 | 81.00 |
| 50 | 76.92 | 77.44 |
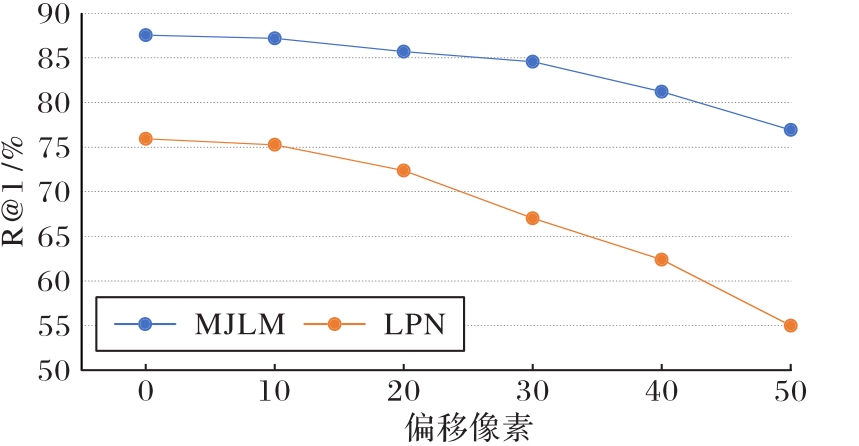
图10 偏移不变性消融实验对比图
Fig. 10 Comparison map of offset-invariance ablation experiment
| 旋转角度/(°) | 无人机→卫星 | ||
|---|---|---|---|
| Query集 | Gallery集 | R@1/% | AP/% |
| 0 | 0 | 87.54 | 89.22 |
| 45 | 0 | 85.97 | 85.13 |
| 90 | 0 | 81.38 | 82.94 |
| 135 | 0 | 84.19 | 84.61 |
| 180 | 0 | 86.15 | 88.49 |
| 32 | 75 | 85.81 | 86.26 |
| 216 | 87 | 83.44 | 83.17 |
表8 University-1652数据集上旋转不变性验证结果
Tab. 8 Verification results of rotation-invariance on University-1652 dataset
| 旋转角度/(°) | 无人机→卫星 | ||
|---|---|---|---|
| Query集 | Gallery集 | R@1/% | AP/% |
| 0 | 0 | 87.54 | 89.22 |
| 45 | 0 | 85.97 | 85.13 |
| 90 | 0 | 81.38 | 82.94 |
| 135 | 0 | 84.19 | 84.61 |
| 180 | 0 | 86.15 | 88.49 |
| 32 | 75 | 85.81 | 86.26 |
| 216 | 87 | 83.44 | 83.17 |
| 1 | SHI Y J, YU X, CAMPBELL D, et al. Where am I looking at? Joint location and orientation estimation by cross-view matching[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 4063-4071. 10.1109/cvpr42600.2020.00412 |
| 2 | SHI Y J, LIU L, YU X, et al. Spatial-aware feature aggregation for image based cross-view geo-localization[C/OL]// Proceedings of the 33rd Conference on Neural Information Processing Systems [2022-03-12].. 10.1609/aaai.v34i07.6875 |
| 3 | RODRIGUES R, TANI M. Are these from the same place? Seeing the unseen in cross-view image geo-localization[C]// Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2021: 3752-3760. 10.1109/wacv48630.2021.00380 |
| 4 | ZHU S J, YANG T J N, CHEN C. Revisiting street-to-aerial view image geo-localization and orientation estimation[C]// Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2021: 756-765. 10.1109/wacv48630.2021.00080 |
| 5 | YU Q, WANG C F, CETINER B, et al. Building information modeling and classification by visual learning at a city scale[EB/OL]. (2020-07-21) [2022-02-01].. |
| 6 | LONG Y, GONG Y P, XIAO Z F, et al. Accurate object localization in remote sensing images based on convolutional neural networks[J]. IEEE Transactions on Geoscience and Remote Sensing, 2017, 55(5): 2486-2498. 10.1109/tgrs.2016.2645610 |
| 7 | ZHAI M H, BESSINGER Z, WORKMAN S, et al. Predicting ground-level scene layout from aerial imagery[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 4132-4140. 10.1109/cvpr.2017.440 |
| 8 | TIAN Y C, CHEN C, SHAH M. Cross-view image matching for geo-localization in urban environments[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 1998-2006. 10.1109/cvpr.2017.216 |
| 9 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition[EB/OL]. (2015-04-10) [2022-01-21].. |
| 10 | HU S X, FENG M D, NGUYEN R M H, et al. CVM-Net: cross-view matching network for image-based ground-to-aerial geo-localization[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7258-7267. 10.1109/cvpr.2018.00758 |
| 11 | REGMI K, SHAH M. Bridging the domain gap for ground-to-aerial image matching[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision . Piscataway: IEEE, 2019: 470-479. 10.1109/iccv.2019.00056 |
| 12 | ZHU S J, YANG T J N, CHEN C. VIGOR: cross-view image geo-localization beyond one-to-one retrieval[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 5316-5325. 10.1109/cvpr46437.2021.00364 |
| 13 | TOKER A, ZHOU Q J, MAXIMOV M, et al. Coming down to earth: satellite-to-street view synthesis for geo-localization[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 6484-6493. 10.1109/cvpr46437.2021.00642 |
| 14 | YAN Y N, DENG L, LIU X L, et al. Application of UAV-based multi-angle hyperspectral remote sensing in fine vegetation classification[J]. Remote Sensing, 2019, 11(23): No.2753. 10.3390/rs11232753 |
| 15 | 赵爽,黄怀玉,胡一鸣,等. 基于深度学习的无人机航拍车辆检测[J].计算机应用, 2019, 39(S2):91-96. |
| ZHAO S, HUANG H Y, HU Y M, et al. Vehicle detection in satellite imagery based on deep learning[J]. Journal of Computer Applications, 2019, 39(S2): 91-96. | |
| 16 | LIU W, YANG M Y, XIE M, et al. Accurate building extraction from fused DSM and UAV images using a chain fully convolutional neural network[J]. Remote Sensing, 2019, 11(24): No.2912. 10.3390/rs11242912 |
| 17 | ZHENG Z D, WEI Y C, YANG Y. University-1652: a multi-view multi-source benchmark for drone-based geo-localization[C]// Proceedings of the 28th ACM International Conference on Multimedia. New York: ACM, 2020: 1395-1403. 10.1145/3394171.3413896 |
| 18 | WANG T Y, ZHENG Z D, YAN C G, et al. Each part matters: local patterns facilitate cross-view geo-localization[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2022, 32(2): 867-879. 10.1109/tcsvt.2021.3061265 |
| 19 | HE S J, WANG Y H. Cross-view geo-localization via salient feature partition network[J]. Journal of Physics: Conference Series, 2021, 1914: No.012009. 10.1088/1742-6596/1914/1/012009 |
| 20 | DING L R, ZHOU J, MENG L X, et al. A practical cross-view image matching method between UAV and satellite for UAV-based geo-localization[J]. Remote Sensing, 2020, 13(1): No.47. 10.3390/rs13010047 |
| 21 | ZHUANG J D, DAI M, CHEN X R Y, et al. A faster and more effective cross-view matching method of UAV and satellite images for UAV geolocalization[J]. Remote Sensing, 2021, 13(19): No.3979. 10.3390/rs13193979 |
| 22 | DAI M, HU J H, ZHUANG J D, et al. A Transformer-based feature segmentation and region alignment method for UAV-view geo-localization[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2022, 32(7): 4376-4389. 10.1109/tcsvt.2021.3135013 |
| 23 | HU S Y, CHANG X J. Multi-view drone-based geo-localization via style and spatial alignment[EB/OL]. (2020-07-09) [2022-03-15]. . |
| 24 | HUI T, CHEN X Q, ZHU R G, et al. Cross-view matching neural network for remote sensing images[C]// Proceedings of the IEEE 6th International Conference on Smart Cloud. Piscataway: IEEE, 2021: 138-143. 10.1109/smartcloud52277.2021.00031 |
| 25 | 周金坤,王先兰,穆楠,等. 基于多视角多监督网络的无人机图像定位方法[J]. 计算机应用, 2022, 42(10):3191-3199. 10.11772/j.issn.1001-9081.2021081518 |
| ZHOU J K, WANG X L, MU N, et al. Unmanned aerial vehicle image localization based on multi-view and multi-supervision network[J]. Journal of Computer Applications, 2022, 42(10):3191-3199. 10.11772/j.issn.1001-9081.2021081518 | |
| 26 | 四川省人工智能研究院(宜宾). 一种基于无人机-卫星的跨视角地理定位方法: 202110916258 .6[P]. 2021-09-07. |
| Sichuan Institute of Artificial Intelligence (Yibin). A cross-view geo-localization method between UAV and satellite: 202110916258 .6[P]. 2021-09-07. | |
| 27 | SHI Y J, YU X, LIU L, et al. Optimal feature transport for cross-view image geo-localization[C]// Proceedings of the 34th AAAI Conference on Artificial Intelligence. Palo Alto, CA: AAAI Press, 2020: 11990-11997. 10.1609/aaai.v34i07.6875 |
| 28 | REGMI K, BORJI A. Cross-view image synthesis using conditional GANs[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 3501-3510. 10.1109/cvpr.2018.00369 |
| 29 | LU X H, LI Z Y, CUI Z P, et al. Geometry-aware satellite-to-ground image synthesis for urban areas[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 856-864. 10.1109/cvpr42600.2020.00094 |
| 30 | 张建伟,雷霖. 基于透视投影的垂直视角投影算法研究[J]. 成都大学学报(自然科学版), 2017, 36(1): 47-50. 10.3969/j.issn.1004-5422.2017.01.012 |
| ZHANG J W, LEI L. Top-view projection algorithm research based on perspective projection[J]. Journal of Chengdu University (Natural Science Edition), 2017, 36(1): 47-50. 10.3969/j.issn.1004-5422.2017.01.012 | |
| 31 | ZHANG H, GOODFELLOW I, METAXAS D, et al. Self-attention generative adversarial networks[C]// Proceedings of the 36th International Conference on Machine Learning. New York: JMLR.org, 2019: 7354-7363. |
| 32 | HE K M, ZHANG X Y, REN S Q, et al. Identity mappings in deep residual networks[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9908. Cham: Springer, 2016: 630-645. |
| 33 | MIYATO T, KATAOKA T, KOYAMA M, et al. Spectral normalization for generative adversarial networks[EB/OL]. (2018-02-16) [2022-03-21].. 10.1007/978-3-030-63416-2_860 |
| 34 | KE Y, SUKTHANKAR R. PCA-SIFT: a more distinctive representation for local image descriptors[C]// Proceedings of the 2004 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2004: II-506-II-513. |
| 35 | RUBLEE E, RABAUD V, KONOLIGE K, et al. ORB: an efficient alternative to SIFT or SURF[C]// Proceedings of the 2011 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2011: 2564-2571. 10.1109/iccv.2011.6126544 |
| 36 | BAY H, TUYTELAARS T, van GOOL L. SURF: speeded up robust features[C]// Proceedings of the 2006 European Conference on Computer Vision, LNCS 3951. Berlin: Springer, 2006: 404-417. |
| [1] | 李顺勇, 李师毅, 胥瑞, 赵兴旺. 基于自注意力融合的不完整多视图聚类算法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2696-2703. |
| [2] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [3] | 秦璟, 秦志光, 李发礼, 彭悦恒. 基于概率稀疏自注意力神经网络的重性抑郁疾患诊断[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2970-2974. |
| [4] | 王熙源, 张战成, 徐少康, 张宝成, 罗晓清, 胡伏原. 面向手术导航3D/2D配准的无监督跨域迁移网络[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2911-2918. |
| [5] | 黄云川, 江永全, 黄骏涛, 杨燕. 基于元图同构网络的分子毒性预测[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2964-2969. |
| [6] | 杨鑫, 陈雪妮, 吴春江, 周世杰. 结合变种残差模型和Transformer的城市公路短时交通流预测[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2947-2951. |
| [7] | 付帅, 郭小英, 白茹意, 闫涛, 陈斌. 改进的CloFormer模型与有序回归相结合的年龄评估方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2372-2380. |
| [8] | 陈彤, 杨丰玉, 熊宇, 严荭, 邱福星. 基于多尺度频率通道注意力融合的声纹库构建方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2407-2413. |
| [9] | 刘禹含, 吉根林, 张红苹. 基于骨架图与混合注意力的视频行人异常检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2551-2557. |
| [10] | 顾焰杰, 张英俊, 刘晓倩, 周围, 孙威. 基于时空多图融合的交通流量预测[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2618-2625. |
| [11] | 石乾宏, 杨燕, 江永全, 欧阳小草, 范武波, 陈强, 姜涛, 李媛. 面向空气质量预测的多粒度突变拟合网络[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2643-2650. |
| [12] | 吴筝, 程志友, 汪真天, 汪传建, 王胜, 许辉. 基于深度学习的患者麻醉复苏过程中的头部运动幅度分类方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2258-2263. |
| [13] | 李欢欢, 黄添强, 丁雪梅, 罗海峰, 黄丽清. 基于多尺度时空图卷积网络的交通出行需求预测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2065-2072. |
| [14] | 张郅, 李欣, 叶乃夫, 胡凯茜. 基于暗知识保护的模型窃取防御技术DKP[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2080-2086. |
| [15] | 赵亦群, 张志禹, 董雪. 基于密集残差物理信息神经网络的各向异性旅行时计算方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2310-2318. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||