


《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (12): 3816-3823.DOI: 10.11772/j.issn.1001-9081.2022111763
所属专题: 先进计算
王龙宝1,2, 栾茵琪1, 徐亮3, 曾昕3, 张帅4, 徐淑芳1,2( )
)
收稿日期:2022-11-28
修回日期:2023-03-26
接受日期:2023-03-30
发布日期:2023-05-08
出版日期:2023-12-10
通讯作者:
徐淑芳
作者简介:王龙宝(1977—),男,江苏盐城人,高级工程师,博士,CCF会员,主要研究方向:领域软件、智能计算基金资助:
Longbao WANG1,2, Yinqi LUAN1, Liang XU3, Xin ZENG3, Shuai ZHANG4, Shufang XU1,2()
Received:2022-11-28
Revised:2023-03-26
Accepted:2023-03-30
Online:2023-05-08
Published:2023-12-10
Contact:
Shufang XU
About author:WANG Longbao, born in 1977, Ph. D., senior engineer. His research interests include domain software, intelligent computing.Supported by:摘要:
路径规划对于无人机(UAV)集群的任务执行十分重要,而且高维场景中的计算通常很复杂。群体智能为解决该问题提供了较好的解决思路。粒子群优化(PSO)算法具有参数少、收敛速度快、操作简单等优点,尤其适用于路径规划问题,但它在应用时存在全局搜索能力差、容易陷入局部最优的问题。为了解决上述问题以提升无人机集群路径规划的效果,提出了动态簇粒子群优化(DCPSO)算法。首先,利用人工势场法和滚动时域控制原理建模UAV集群路径规划问题的任务场景;其次,引入Tent混沌映射和动态簇机制进一步提升全局搜索能力和搜索精度;最后,使用DCPSO算法优化模型的目标函数,以获得UAV集群的每个轨迹点的选择。在单峰/多峰、低维/高维不同组合的10种基准测试函数下的仿真实验结果表明,与PSO、鸽子启发优化(PIO)、麻雀搜索算法(SSA)和混沌扰动鸽群优化(CDPIO)算法相比,DCPSO算法具有更好的计算最优值、均值和方差,搜索精度更佳,稳定性更强。此外,UAV集群路径规划应用实例仿真结果也验证了DCPSO算法的性能与效果。
中图分类号:
王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 计算机应用, 2023, 43(12): 3816-3823.
Longbao WANG, Yinqi LUAN, Liang XU, Xin ZENG, Shuai ZHANG, Shufang XU. Route planning method of UAV swarm based on dynamic cluster particle swarm optimization[J]. Journal of Computer Applications, 2023, 43(12): 3816-3823.
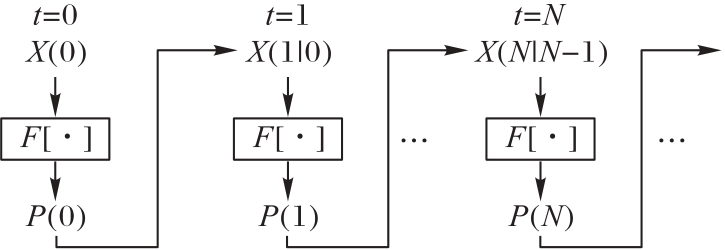
图1 无人机集群路径规划模型的结构
Fig.1 Structure of UAV swarm route planning model
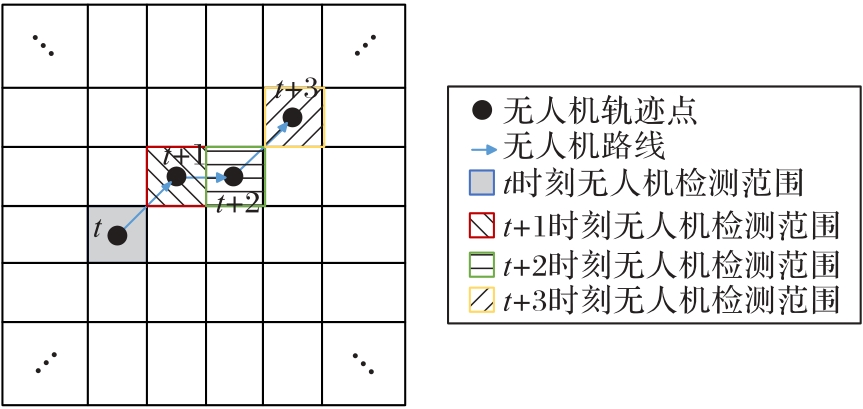
图2 滚动时域控制策略示意图
Fig.2 Schematic diagram of receding horizon control strategy
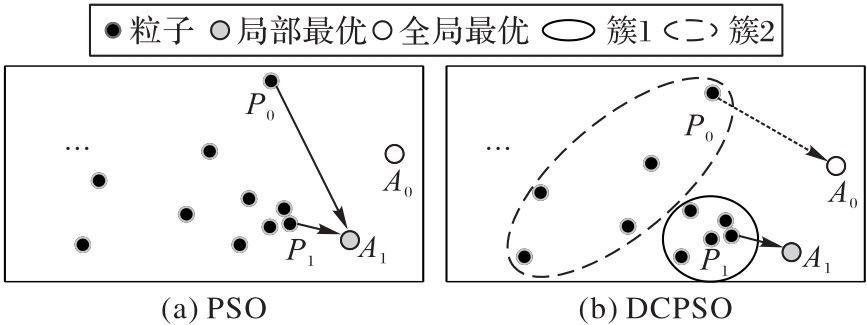
图3 PSO和DCPSO算法的粒子运动对比
Fig.3 Particle motion comparison of PSO and DCPSO algorithms
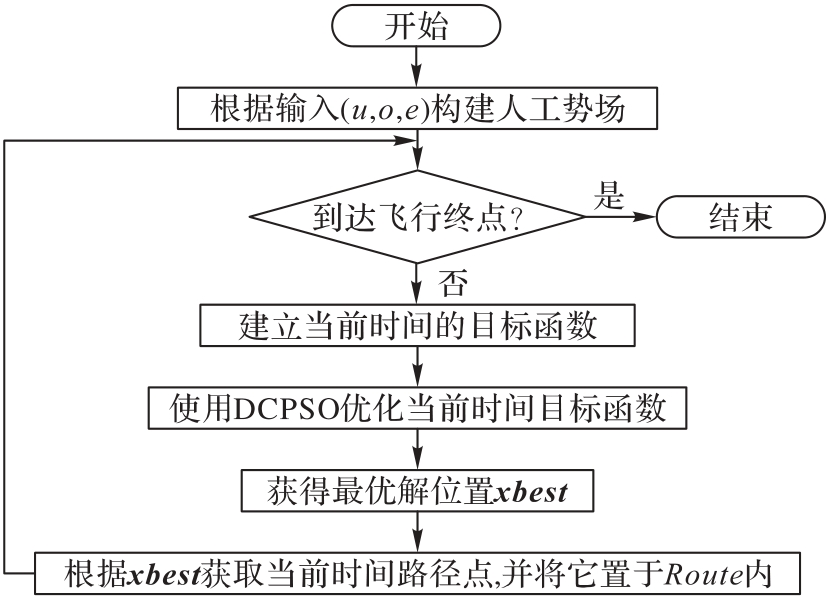
图4 基于DCPSO的无人机集群路径规划流程
Fig.4 Path planning flow of UAV swarm based on DCPSO
| 算法 | 参数 | 描述 | 值 |
|---|---|---|---|
| PSO | N | 种群数量 | 50 |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 | ||
| PIO | 种群数量 | 50 | |
| 地图和指南针影响因子 | 0.3 | ||
| SSA | 种群数量 | 50 | |
| 发现者 | 20 | ||
| 警觉者 | 10 | ||
| DCPSO | 种群数量 | 50 | |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 |
表1 PSO、PIO、SSA和DCPSO算法的参数
Tab.1 Parameters for PSO, PIO, SSA and DCPSO algorithms
| 算法 | 参数 | 描述 | 值 |
|---|---|---|---|
| PSO | N | 种群数量 | 50 |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 | ||
| PIO | 种群数量 | 50 | |
| 地图和指南针影响因子 | 0.3 | ||
| SSA | 种群数量 | 50 | |
| 发现者 | 20 | ||
| 警觉者 | 10 | ||
| DCPSO | 种群数量 | 50 | |
| 学习因子(认知部分) | 2 | ||
| 学习因子(社会部分) | 2 | ||
| 惯性权重因子 | 1 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Easom | PSO | -4.286 4×10-5 | -6.061 5×10-6 | 1.302 8×10-5 | 1.651 6 |
| PIO | -1.0 | -0.999 9 | 7.266 9×10-6 | 6.731 4 | |
| SSA | -0.999 9 | -0.999 9 | 3.888 6×10-7 | 2.064 8 | |
| CDPIO | -1.0 | -0.999 9 | 2.879 7×10-17 | — | |
| DCPSO | -2.675 2×10-9 | -2.675 2×10-9 | 0 | 13.093 3 | |
| Matyas | PSO | 0.015 0 | 0.229 2 | 0.269 8 | 1.360 0 |
| PIO | 9.498 9×10-63 | 3.321 0×10-30 | 2.266 6×10-29 | 6.790 1 | |
| SSA | 0 | 2.391 7×10-17 | 1.242 0×10-16 | 2.043 6 | |
| CDPIO | 1.046 7×10-101 | 2.986 7×10-95 | 2.376 5×10-188 | — | |
| DCPSO | 0 | 0 | 0 | 12.866 3 |
表2 单峰低维函数的测试结果
Tab.2 Test results of unimodal low-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Easom | PSO | -4.286 4×10-5 | -6.061 5×10-6 | 1.302 8×10-5 | 1.651 6 |
| PIO | -1.0 | -0.999 9 | 7.266 9×10-6 | 6.731 4 | |
| SSA | -0.999 9 | -0.999 9 | 3.888 6×10-7 | 2.064 8 | |
| CDPIO | -1.0 | -0.999 9 | 2.879 7×10-17 | — | |
| DCPSO | -2.675 2×10-9 | -2.675 2×10-9 | 0 | 13.093 3 | |
| Matyas | PSO | 0.015 0 | 0.229 2 | 0.269 8 | 1.360 0 |
| PIO | 9.498 9×10-63 | 3.321 0×10-30 | 2.266 6×10-29 | 6.790 1 | |
| SSA | 0 | 2.391 7×10-17 | 1.242 0×10-16 | 2.043 6 | |
| CDPIO | 1.046 7×10-101 | 2.986 7×10-95 | 2.376 5×10-188 | — | |
| DCPSO | 0 | 0 | 0 | 12.866 3 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Sumsquares | PSO | 6.675 7×10-6 | 6.892 1×10-6 | 6.67×10-6 | 5.425 6 |
| PIO | 1.926 6×10-17 | 6.055 5×10-14 | 3.777 3×10-13 | 9.477 7 | |
| SSA | 0 | 4.495 0×10-10 | 1.361 6×10-9 | 3.857 2 | |
| DCPSO | 0 | 0 | 0 | 16.247 0 | |
| Sphere | PSO | 9.144 3×10-4 | 2.483 7×10-2 | 9.12×10-4 | 14.595 4 |
| PIO | 3.147 7×10-24 | 3.644 5×10-21 | 2.820 6×10-20 | 12.703 2 | |
| SSA | 0 | 7.332 8×10-8 | 3.411 3×10-7 | 3.310 4 | |
| DCPSO | 0 | 0 | 0 | 15.566 5 |
表3 单峰高维函数的测试结果
Tab.3 Test results of unimodal high-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Sumsquares | PSO | 6.675 7×10-6 | 6.892 1×10-6 | 6.67×10-6 | 5.425 6 |
| PIO | 1.926 6×10-17 | 6.055 5×10-14 | 3.777 3×10-13 | 9.477 7 | |
| SSA | 0 | 4.495 0×10-10 | 1.361 6×10-9 | 3.857 2 | |
| DCPSO | 0 | 0 | 0 | 16.247 0 | |
| Sphere | PSO | 9.144 3×10-4 | 2.483 7×10-2 | 9.12×10-4 | 14.595 4 |
| PIO | 3.147 7×10-24 | 3.644 5×10-21 | 2.820 6×10-20 | 12.703 2 | |
| SSA | 0 | 7.332 8×10-8 | 3.411 3×10-7 | 3.310 4 | |
| DCPSO | 0 | 0 | 0 | 15.566 5 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Bohachevs-ky1 | PSO | 2.124 7×10-11 | 1.297 5×10-8 | 2.293 5×10-8 | 5.343 8 |
| PIO | 0 | 0 | 0 | 9.163 6 | |
| SSA | 0 | 1.811 7×10-17 | 5.499 4×10-17 | 3.582 6 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.871 4 | |
| Eggcrate | PSO | 7.468 4×10-12 | 3.484 2×10-8 | 4.367 4×10-8 | 6.234 7 |
| PIO | 9.961 7×10-61 | 3.902 3×10-13 | 3.875 3×10-12 | 8.345 3 | |
| SSA | 9.375 7×10-9 | 5.087 9×10-7 | 5.915 2×10-7 | 2.092 5 | |
| DCPSO | 0 | 0 | 0 | 12.851 3 | |
| Schaffer | PSO | 3.215 4×10-11 | 5.369 7×10-7 | 6.324 7×10-9 | 7.267 4 |
| PIO | 0 | 1.811 7×10-14 | 5.337 2×10-14 | 9.655 0 | |
| SSA | 0 | 1.690 1×10-13 | 9.099 3×10-13 | 2.114 9 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.904 8 | |
| Bohachevs-ky3 | PSO | 1.514 8×10-11 | 4.398 2×10-9 | 7.269 4×10-9 | 5.639 8 |
| PIO | 0 | 4.440 8×10-18 | 3.222 3×10-17 | 8.161 9 | |
| SSA | 0 | 8.173 7×10-11 | 4.400 4×10-10 | 2.190 1 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 13.133 4 |
表4 多峰低维函数的测试结果
Tab.4 Test results of multimodal low-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Bohachevs-ky1 | PSO | 2.124 7×10-11 | 1.297 5×10-8 | 2.293 5×10-8 | 5.343 8 |
| PIO | 0 | 0 | 0 | 9.163 6 | |
| SSA | 0 | 1.811 7×10-17 | 5.499 4×10-17 | 3.582 6 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.871 4 | |
| Eggcrate | PSO | 7.468 4×10-12 | 3.484 2×10-8 | 4.367 4×10-8 | 6.234 7 |
| PIO | 9.961 7×10-61 | 3.902 3×10-13 | 3.875 3×10-12 | 8.345 3 | |
| SSA | 9.375 7×10-9 | 5.087 9×10-7 | 5.915 2×10-7 | 2.092 5 | |
| DCPSO | 0 | 0 | 0 | 12.851 3 | |
| Schaffer | PSO | 3.215 4×10-11 | 5.369 7×10-7 | 6.324 7×10-9 | 7.267 4 |
| PIO | 0 | 1.811 7×10-14 | 5.337 2×10-14 | 9.655 0 | |
| SSA | 0 | 1.690 1×10-13 | 9.099 3×10-13 | 2.114 9 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 12.904 8 | |
| Bohachevs-ky3 | PSO | 1.514 8×10-11 | 4.398 2×10-9 | 7.269 4×10-9 | 5.639 8 |
| PIO | 0 | 4.440 8×10-18 | 3.222 3×10-17 | 8.161 9 | |
| SSA | 0 | 8.173 7×10-11 | 4.400 4×10-10 | 2.190 1 | |
| CDPIO | 0 | 0 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 13.133 4 |
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Rastrigin | PSO | 63.489 1 | 74.234 6 | 9.116 8 | 24.284 6 |
| PIO | 0 | 1.225 6×10-13 | 1.231 9×10-14 | 20.417 8 | |
| SSA | 0 | 6.296 3×10-5 | 0.000 2 | 15.781 6 | |
| CDPIO | -3.005 4 | -3.005 4 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 43.357 3 | |
| Ackley | PSO | 2.389 4 | 16.081 6 | 8.514 4 | 70.364 0 |
| PIO | 1.325 4×10-10 | 6.737 3×10-10 | 1.060 7×10-9 | 46.840 7 | |
| SSA | 4.440 8×10-16 | 1.961 9×10-5 | 0.000 1 | 31.933 4 | |
| DCPSO | 4.440 8×10-16 | 4.440 8×10-16 | 0 | 116.100 0 |
表5 多峰高维函数的测试结果
Tab.5 Test results of multimodal high-dimensional functions
| 函数名 | 算法 | 最优值 | 平均值 | 方差 | 耗时/s |
|---|---|---|---|---|---|
| Rastrigin | PSO | 63.489 1 | 74.234 6 | 9.116 8 | 24.284 6 |
| PIO | 0 | 1.225 6×10-13 | 1.231 9×10-14 | 20.417 8 | |
| SSA | 0 | 6.296 3×10-5 | 0.000 2 | 15.781 6 | |
| CDPIO | -3.005 4 | -3.005 4 | 0 | — | |
| DCPSO | 0 | 0 | 0 | 43.357 3 | |
| Ackley | PSO | 2.389 4 | 16.081 6 | 8.514 4 | 70.364 0 |
| PIO | 1.325 4×10-10 | 6.737 3×10-10 | 1.060 7×10-9 | 46.840 7 | |
| SSA | 4.440 8×10-16 | 1.961 9×10-5 | 0.000 1 | 31.933 4 | |
| DCPSO | 4.440 8×10-16 | 4.440 8×10-16 | 0 | 116.100 0 |
| 参数 | 描述 | 值 |
|---|---|---|
| Larea /km | 飞行区域长度 | 100 |
| Warea /km | 飞行区域宽度 | 100 |
| Harea /km | 飞行区域高度 | 20 |
| Num×Num | 网格数 | 100×100 |
| UAVS=[uav1,uav2,uav3,uav4] | 无人机集群 初始坐标 | (10,20,15) |
| (20,10,15) | ||
| (10,10,15) | ||
| (10,15,15) | ||
| Obs=[obs1,obs2] | 障碍物中心位置 | (35,40,15) |
| (50,50,15) | ||
| Obj | 目标点坐标 | (85,80,15) |
| φ /(°) | 无人机最大航向角 | 45 |
表6 实验参数设置
Tab.6 Experimental parameter setting
| 参数 | 描述 | 值 |
|---|---|---|
| Larea /km | 飞行区域长度 | 100 |
| Warea /km | 飞行区域宽度 | 100 |
| Harea /km | 飞行区域高度 | 20 |
| Num×Num | 网格数 | 100×100 |
| UAVS=[uav1,uav2,uav3,uav4] | 无人机集群 初始坐标 | (10,20,15) |
| (20,10,15) | ||
| (10,10,15) | ||
| (10,15,15) | ||
| Obs=[obs1,obs2] | 障碍物中心位置 | (35,40,15) |
| (50,50,15) | ||
| Obj | 目标点坐标 | (85,80,15) |
| φ /(°) | 无人机最大航向角 | 45 |
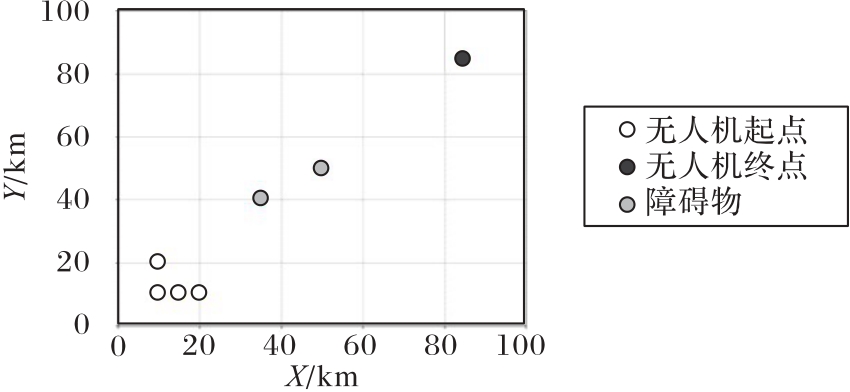
图5 无人机集群、障碍物和轨迹终点分布图
Fig.5 Distribution map of UAV swarm, obstacles and trajectory end point

图6 人工势场图
Fig. 6 Artificial potential field diagram
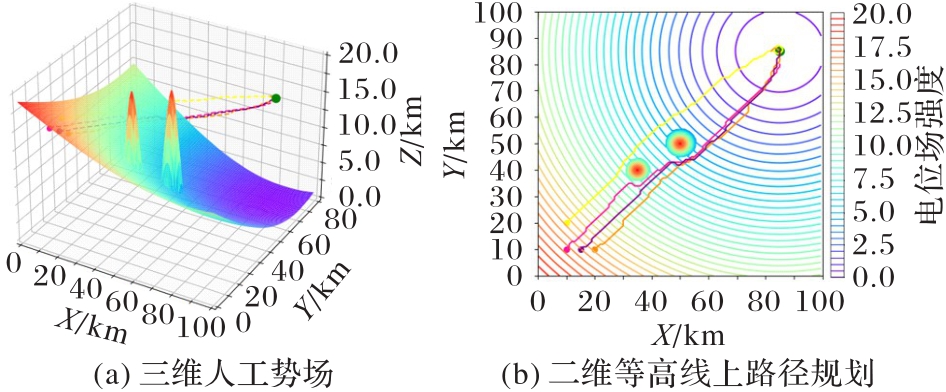
图7 DCPSO算法的路径规划
Fig. 7 Route planning of DCPSO algorithm

图8 DCPSO算法的收敛曲线
Fig.8 Convergence curve of DCPSO algorithm

图9 多障碍环境下DCPSO算法的路径规划
Fig. 9 Route planning of DCPSO algorithm in multi-obstacle environment
| 序号 | 轨迹长度/km | 序号 | 轨迹长度/km | 序号 | 轨迹长度/km |
|---|---|---|---|---|---|
| 1 | 108.784 7 | 11 | 109.477 1 | 21 | 108.752 3 |
| 2 | 108.888 3 | 12 | 108.441 6 | 22 | 108.923 8 |
| 3 | 108.577 6 | 13 | 109.027 4 | 23 | 109.027 4 |
| 4 | 109.613 2 | 14 | 108.338 0 | 24 | 108.545 2 |
| 5 | 109.406 1 | 15 | 109.855 8 | 25 | 108.820 3 |
| 6 | 108.888 3 | 16 | 109.234 5 | 26 | 108.234 5 |
| 7 | 109.406 1 | 17 | 109.027 4 | 27 | 109.130 9 |
| 8 | 109.406 1 | 18 | 109.130 9 | 28 | 108.902 5 |
| 9 | 109.234 5 | 19 | 109.441 6 | 29 | 108.652 5 |
| 10 | 108.820 3 | 20 | 108.545 2 | 30 | 109.006 0 |
表7 DCPSO算法进行30次独立重复实验的结果
Tab. 7 Results of using DCPSO algorithm to conduct 30 independent repeated experiments
| 序号 | 轨迹长度/km | 序号 | 轨迹长度/km | 序号 | 轨迹长度/km |
|---|---|---|---|---|---|
| 1 | 108.784 7 | 11 | 109.477 1 | 21 | 108.752 3 |
| 2 | 108.888 3 | 12 | 108.441 6 | 22 | 108.923 8 |
| 3 | 108.577 6 | 13 | 109.027 4 | 23 | 109.027 4 |
| 4 | 109.613 2 | 14 | 108.338 0 | 24 | 108.545 2 |
| 5 | 109.406 1 | 15 | 109.855 8 | 25 | 108.820 3 |
| 6 | 108.888 3 | 16 | 109.234 5 | 26 | 108.234 5 |
| 7 | 109.406 1 | 17 | 109.027 4 | 27 | 109.130 9 |
| 8 | 109.406 1 | 18 | 109.130 9 | 28 | 108.902 5 |
| 9 | 109.234 5 | 19 | 109.441 6 | 29 | 108.652 5 |
| 10 | 108.820 3 | 20 | 108.545 2 | 30 | 109.006 0 |
| 1 | LYU H, YIN Y. Fast path planning for autonomous ships in restricted waters[J]. Applied Sciences, 2018, 8(12): No.2592. 10.3390/app8122592 |
| 2 | VOLKAN PEHLIVANOGLU Y. A new vibrational genetic algorithm enhanced with a Voronoi diagram for path planning of autonomous UAV[J]. Aerospace Science and Technology, 2012, 16(1): 47-55. 10.1016/j.ast.2011.02.006 |
| 3 | XUE J, SHEN B. A novel swarm intelligence optimization approach: sparrow search algorithm[J]. Systems Science and Control Engineering, 2020, 8(1): 22-34. 10.1080/21642583.2019.1708830 |
| 4 | DUAN H, QIAO P. Pigeon-inspired optimization: a new swarm intelligence optimizer for air robot path planning[J]. International Journal of Intelligent Computing and Cybernetics, 2014, 7(1): 24-37. 10.1108/ijicc-02-2014-0005 |
| 5 | BHARNE P K, GULHANE V S, YEWALE S K. Data clustering algorithms based on swarm intelligence[C]// Proceedings of the 3rd International Conference on Electronics Computer Technology. Piscataway: IEEE, 2011: 407-411. 10.1109/icectech.2011.5941931 |
| 6 | KENNEDY J, EBERHART R. Particle swarm optimization[C]// Proceedings of the 1995 International Conference on Neural Networks — Volume 4. Piscataway: IEEE, 1995: 1942-1948. |
| 7 | 鲁亮亮,代冀阳,应进,等. 基于APSODE-MS算法的无人机航迹规划[J]. 控制与决策, 2022, 37(7):1695-1704. |
| LU L L, DAI J Y, YING J, et al. UAV trajectory planning based on APSODE-MS algorithm[J]. Control and Decision, 2022, 37(7): 1695-1704. | |
| 8 | NAYEEM G M, FAN M, AKHTER Y. A time-varying adaptive inertia weight based modified PSO algorithm for UAV path planning[C]// Proceedings of the 2nd International Conference on Robotics, Electrical and Signal Processing Techniques. Piscataway: IEEE, 2021: 573-576. 10.1109/icrest51555.2021.9331101 |
| 9 | LI X, ZHAO Y, ZHANG J, et al. A hybrid PSO algorithm based flight path optimization for multiple agricultural UAVs[C]// Proceedings of the IEEE 28th International Conference on Tools with Artificial Intelligence. Piscataway: IEEE, 2016: 691-697. 10.1109/ictai.2016.0110 |
| 10 | 田兴华,张纪会,李阳. 基于混沌映射的自适应退火型粒子群算法[J]. 复杂系统与复杂性科学, 2020, 17(1):45-54. |
| TIAN X H, ZHANG J H, LI Y. An adaptive annealing particle swarm optimization based on chaotic mapping [J]. Complex Systems and Complexity Science, 2020, 17(1): 45-54. | |
| 11 | ZHANG R, SUN M, PAN C. Micro-nano satellite resource allocation algorithm based on chaos-filled PSO [C]// Proceedings of the 6th International Symposium on Computer and Information Processing Technology. Piscataway: IEEE, 2021: 204-208. 10.1109/iscipt53667.2021.00048 |
| 12 | KHATIB O. Real-time obstacle avoidance for manipulators and mobile robots [J]. The International Journal of Robotics Research, 1986, 5(1): 90-98. 10.1177/027836498600500106 |
| 13 | 段海滨,杨之元. 基于柯西变异鸽群优化的大型民用飞机滚动时域控制[J]. 中国科学:技术科学, 2018, 48(3):277-288. 10.1360/n092017-00211 |
| DUAN H B, ZHANG Z Y. Large civil aircraft receding horizon control based on Cauthy mutation pigeon inspired optimization [J]. SCIENTIA SINICA Technologica, 2018, 48(3): 277-288. 10.1360/n092017-00211 | |
| 14 | LIANG X, WANG D, HUANG M. Improved grey wolf optimizer and their applications[C]// Proceedings of the IEEE 7th International Conference on Computer Science and Network Technology. Piscataway: IEEE, 2019: 107-110. 10.1109/iccsnt47585.2019.8962504 |
| 15 | XU S, XU D, MAO Y, et al. A cooperative dynamic cluster in multitasking mobile networks [J]. Intelligent Automation and Soft Computing, 2017, 23(4): 567-572. 10.1080/10798587.2017.1316079 |
| 16 | LI L, XU S, NIE H, et al. Collaborative target search algorithm for UAV based on chaotic disturbance pigeon-inspired optimization[J]. Applied Sciences, 2021, 11(16): No.7358. 10.3390/app11167358 |
| [1] | 马天, 席润韬, 吕佳豪, 曾奕杰, 杨嘉怡, 张杰慧. 基于深度强化学习的移动机器人三维路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2055-2064. |
| [2] | 田润泽, 周宇龙, 朱洪, 薛岗. 基于局部信息的服务迁移路径选择算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2168-2174. |
| [3] | 高培根, 锁斌. 基于加权犹豫模糊集的实验设计与分阶段PSO-Kriging建模[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2144-2150. |
| [4] | 刘晓芳, 张军. 概率驱动的动态多目标多智能体协同调度进化优化[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1372-1377. |
| [5] | 李建强, 何舟. 面向多行程取送货车辆路径问题的混合NSGA-Ⅱ[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1187-1194. |
| [6] | 黄海新, 于广威, 程寿山, 李春明. 基于改进灰狼优化的桥梁检测爬壁机器人全覆盖路径规划[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 966-971. |
| [7] | 杜晓昕, 周薇, 王浩, 郝田茹, 王振飞, 金梅, 张剑飞. 智能算法的亚群优化策略综述[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 819-830. |
| [8] | 宋紫阳, 李军怀, 王怀军, 苏鑫, 于蕾. 基于路径模仿和SAC强化学习的机械臂路径规划算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 439-444. |
| [9] | 王震, 张珊珊, 邬斌扬, 苏万华. 基于自适应粒子群优化算法的串联复合涡轮储能优化策略[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 611-618. |
| [10] | 邓辅秦, 官桧锋, 谭朝恩, 付兰慧, 王宏民, 林天麟, 张建民. 基于请求与应答通信机制和局部注意力机制的多机器人强化学习路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 432-438. |
| [11] | 邓辅秦, 谭朝恩, 黎俊炜, 钟家铭, 付兰慧, 张建民, 王宏民, 李楠楠, 姜炳春, 林天麟. 面向大型仓储环境的基于冲突搜索算法[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3854-3860. |
| [12] | 孙鉴, 马宝全, 吴隹伟, 杨晓焕, 武涛, 陈攀. 地震场景下无人机群路径规划与任务分配均衡联合优化[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3232-3239. |
| [13] | 梁军, 洪泽泓, 余松森. 基于改进粒子群优化算法和遗传变异的图像分割模型[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1743-1749. |
| [14] | 高智慧, 韩萌, 刘淑娟, 李昂, 穆栋梁. 基于智能优化算法的高效用项集挖掘方法综述[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1676-1686. |
| [15] | 于振华, 刘争气, 刘颖, 郭城. 基于自适应混合粒子群优化的软件缺陷预测特征选择方法[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1206-1213. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||