


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (5): 1677-1685.DOI: 10.11772/j.issn.1001-9081.2024050652
• 多媒体计算与计算机仿真 • 上一篇
陈子和1,2, 陈斌2,3,4( )
)
收稿日期:2024-05-23
修回日期:2024-08-26
接受日期:2024-08-30
发布日期:2024-09-05
出版日期:2025-05-10
通讯作者:
陈斌
作者简介:陈子和(1994—),男,四川成都人,博士研究生,主要研究方向:机器视觉、异常检测Received:2024-05-23
Revised:2024-08-26
Accepted:2024-08-30
Online:2024-09-05
Published:2025-05-10
Contact:
Bin CHEN
About author:CHEN Zihe, born in 1994, Ph. D. candidate. His research interests include machine vision, anomaly detection.摘要:
随着工业自动化需求的不断增长,三维点云异常检测在产品质量控制中扮演着越来越重要的角色。然而,现有方法通常依赖单一特征,导致信息损失和精度下降。因此,提出一种基于多表征融合的无监督点云异常检测方法MRF(Multi-Representation Fusion)。MRF利用多角度旋转和多种着色方案将点云渲染为多模态图像,并使用预训练的二维卷积神经网络提取丰富的语义特征;同时,还采用预训练的Point Transformer提取三维结构特征。之后,通过融合二维图像语义特征和三维结构特征,MRF能够更全面地捕捉点云信息。在异常检测阶段,MRF使用基于正样本记忆库和近邻搜索的方法,可有效地识别异常点云。在MVTec 3D AD数据集上的实验结果表明,MRF的点云级接受者操作特征曲线下面积(AUROC)为0.972,点级区域重叠度(AUPRO)为0.948,显著优于对比方法。可见,该方法的有效性和鲁棒性使它成为工业应用中极具潜力的解决方案。
中图分类号:
陈子和, 陈斌. 基于多表征融合的无监督点云异常检测[J]. 计算机应用, 2025, 45(5): 1677-1685.
Zihe CHEN, Bin CHEN. Unsupervised point cloud anomaly detection based on multi-representation fusion[J]. Journal of Computer Applications, 2025, 45(5): 1677-1685.
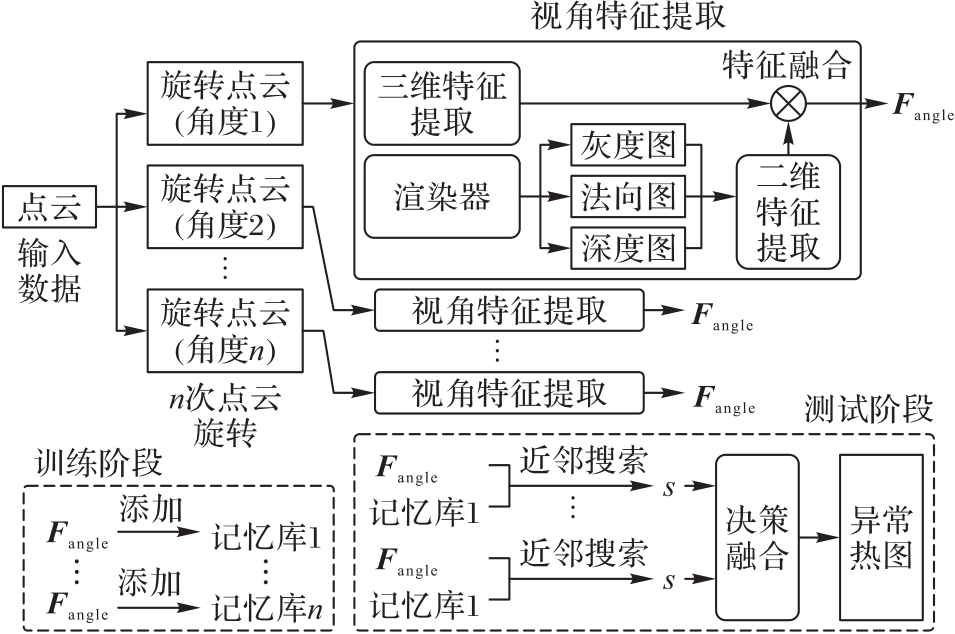
图1 MRF整体结构
Fig. 1 Overall structure of MRF
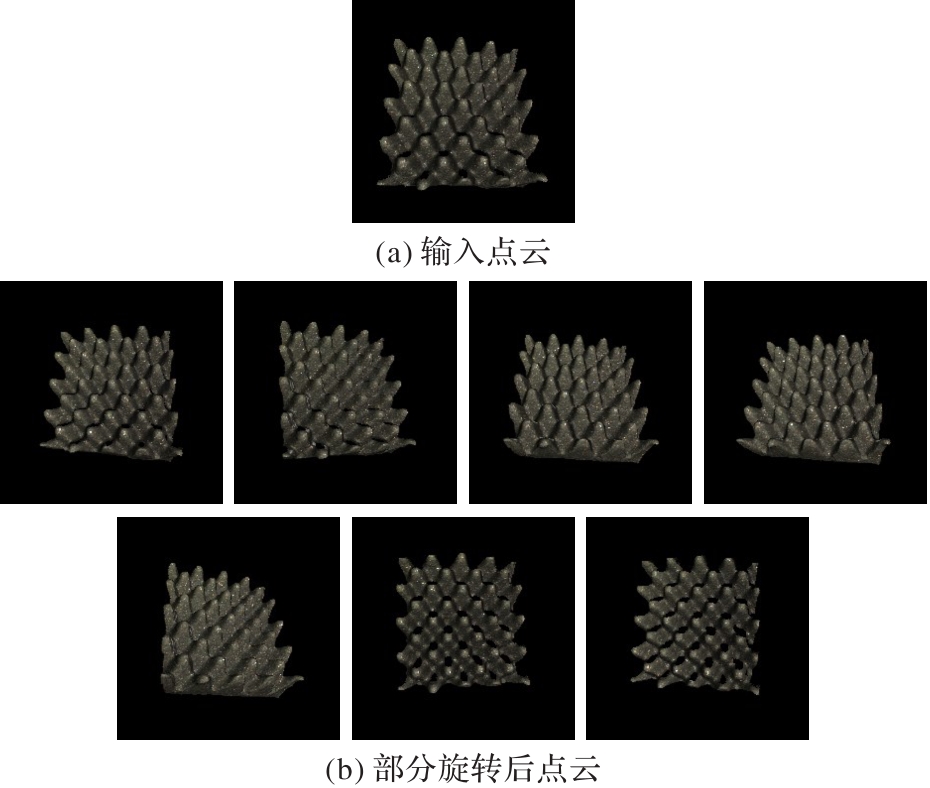
图2 点云旋转后的二维渲染结果
Fig. 2 2D rendering of rotated point cloud
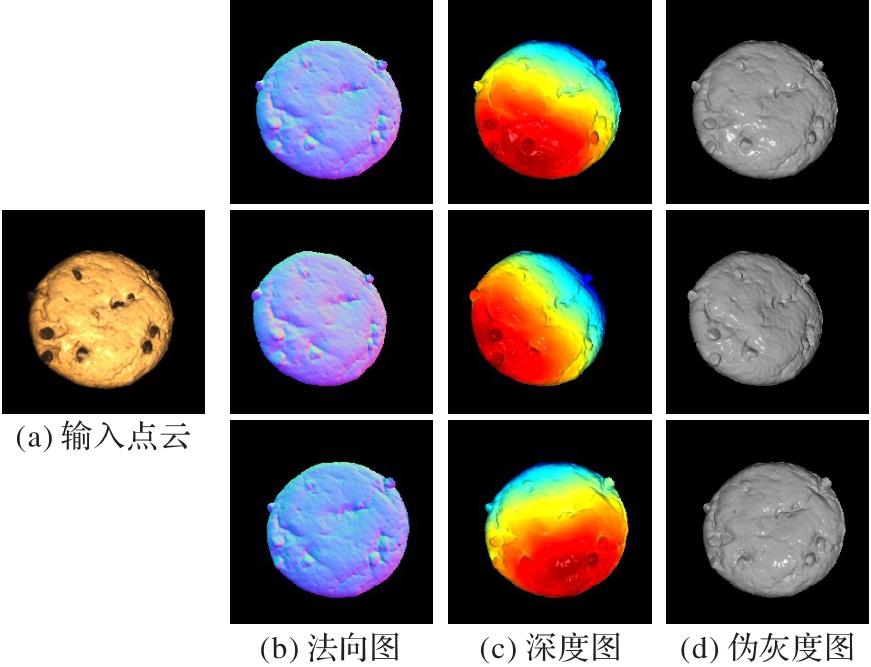
图3 不同着色方案渲染图
Fig. 3 Renderings of different coloring schemes
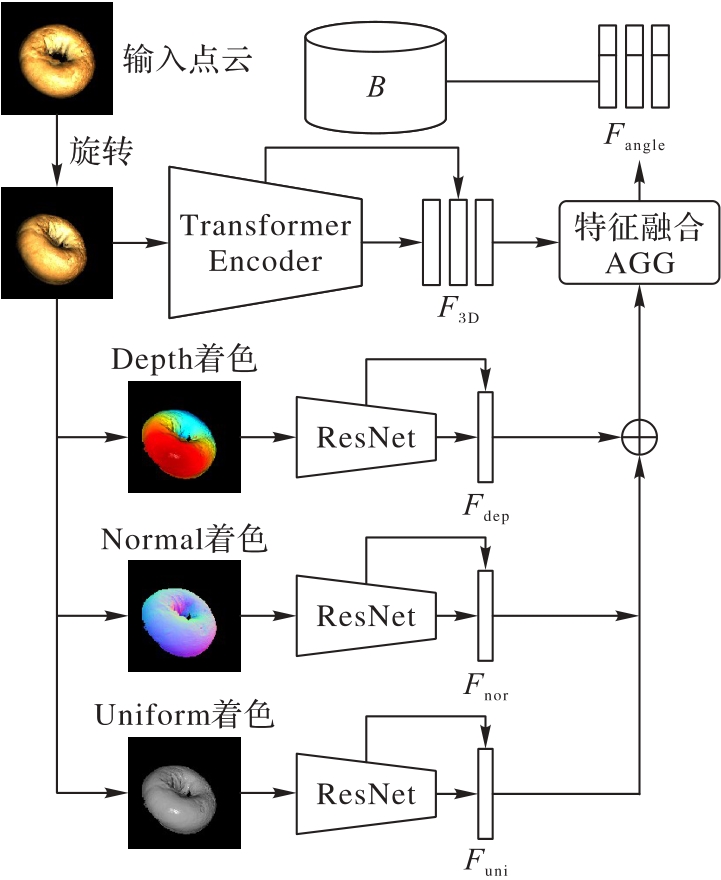
图4 正样本记忆库的建立
Fig. 4 Construction of normal sample memory bank
| 类别 | Voxel GAN[ | Voxel AE[ | Voxel VM[ | PatchCore[ | Depth SIFT[ | PC FPFH[ | Spin-Net[ | 3D-ST[ | MRF |
|---|---|---|---|---|---|---|---|---|---|
| 平均 | 53.8 | 57.2 | 69.9 | 63.7 | 71.4 | 52.4 | 74.8 | 97.2 | |
| bagel | 38.3 | 69.3 | 75.0 | 62.4 | 69.6 | 82.0 | 53.5 | 99.0 | |
| cable gland | 62.3 | 42.5 | 68.3 | 55.3 | 53.3 | 41.3 | 48.4 | 95.6 | |
| carrot | 47.4 | 51.5 | 61.3 | 67.6 | 82.4 | 87.7 | 56.8 | 99.2 | |
| cookie | 63.9 | 79.0 | 73.8 | 83.8 | 69.6 | 76.9 | 66.2 | 98.9 | |
| dowel | 56.4 | 49.4 | 82.3 | 60.8 | 79.5 | 71.8 | 47.2 | 95.7 | |
| foam | 40.9 | 55.8 | 69.3 | 55.8 | 57.4 | 48.0 | 66.3 | 90.1 | |
| peach | 61.7 | 53.7 | 67.9 | 56.7 | 57.3 | 36.7 | 76.3 | 99.5 | |
| potato | 42.7 | 48.4 | 65.2 | 49.6 | 74.6 | 49.4 | 68.7 | 98.2 | |
| rope | 66.3 | 63.9 | 60.9 | 69.9 | 93.6 | 99.0 | 72.2 | 95.8 | |
| tire | 57.7 | 58.3 | 61.9 | 55.3 | 58.2 | 52.7 | 48.6 | 97.9 |
表1 不同方法在MVTec 3D AD数据集上的点云级AUROC ( %)
Tab. 1 Point cloud-level AUROC for different methods on MVTec 3D AD dataset
| 类别 | Voxel GAN[ | Voxel AE[ | Voxel VM[ | PatchCore[ | Depth SIFT[ | PC FPFH[ | Spin-Net[ | 3D-ST[ | MRF |
|---|---|---|---|---|---|---|---|---|---|
| 平均 | 53.8 | 57.2 | 69.9 | 63.7 | 71.4 | 52.4 | 74.8 | 97.2 | |
| bagel | 38.3 | 69.3 | 75.0 | 62.4 | 69.6 | 82.0 | 53.5 | 99.0 | |
| cable gland | 62.3 | 42.5 | 68.3 | 55.3 | 53.3 | 41.3 | 48.4 | 95.6 | |
| carrot | 47.4 | 51.5 | 61.3 | 67.6 | 82.4 | 87.7 | 56.8 | 99.2 | |
| cookie | 63.9 | 79.0 | 73.8 | 83.8 | 69.6 | 76.9 | 66.2 | 98.9 | |
| dowel | 56.4 | 49.4 | 82.3 | 60.8 | 79.5 | 71.8 | 47.2 | 95.7 | |
| foam | 40.9 | 55.8 | 69.3 | 55.8 | 57.4 | 48.0 | 66.3 | 90.1 | |
| peach | 61.7 | 53.7 | 67.9 | 56.7 | 57.3 | 36.7 | 76.3 | 99.5 | |
| potato | 42.7 | 48.4 | 65.2 | 49.6 | 74.6 | 49.4 | 68.7 | 98.2 | |
| rope | 66.3 | 63.9 | 60.9 | 69.9 | 93.6 | 99.0 | 72.2 | 95.8 | |
| tire | 57.7 | 58.3 | 61.9 | 55.3 | 58.2 | 52.7 | 48.6 | 97.9 |
| 类别 | Voxel GAN[ | Voxel AE[ | Voxel VM[ | PatchCore[ | Depth SIFT[ | PC FPFH[ | Spin-Net[ | 3D-ST[ | MRF |
|---|---|---|---|---|---|---|---|---|---|
| 平均 | 58.3 | 34.8 | 49.2 | 58.6 | 86.6 | 65.4 | 83.3 | 94.8 | |
| bagel | 44.0 | 26.0 | 45.3 | 70.1 | 89.4 | 97.2 | 63.5 | 95.0 | |
| cable gland | 45.3 | 34.1 | 34.3 | 54.4 | 72.2 | 31.6 | 48.3 | 95.9 | |
| carrot | 82.5 | 58.1 | 52.1 | 79.1 | 96.3 | 92.2 | 98.6 | ||
| cookie | 75.5 | 35.1 | 69.7 | 83.5 | 87.1 | 93.9 | 78.0 | 88.0 | |
| dowel | 78.2 | 50.2 | 68.0 | 53.1 | 96.3 | 87.0 | 90.5 | 90.5 | |
| foam | 37.8 | 23.4 | 28.4 | 10.0 | 61.3 | 38.0 | 63.2 | 88.5 | |
| peach | 39.2 | 35.1 | 34.9 | 80.0 | 87.0 | 58.5 | 94.5 | 98.2 | |
| potato | 63.9 | 65.8 | 63.4 | 54.9 | 97.3 | 98.1 | 69.9 | 98.8 | |
| rope | 77.5 | 1.5 | 61.6 | 82.7 | 95.8 | 98.0 | 95.5 | 96.1 | |
| tire | 38.9 | 18.5 | 34.6 | 18.5 | 87.3 | 40.0 | 54.2 | 97.9 |
表2 不同方法在MVTec 3D AD数据集上的点级AUPRO ( %)
Tab. 2 Point-level AUPRO for different methods on MVTec 3D AD dataset
| 类别 | Voxel GAN[ | Voxel AE[ | Voxel VM[ | PatchCore[ | Depth SIFT[ | PC FPFH[ | Spin-Net[ | 3D-ST[ | MRF |
|---|---|---|---|---|---|---|---|---|---|
| 平均 | 58.3 | 34.8 | 49.2 | 58.6 | 86.6 | 65.4 | 83.3 | 94.8 | |
| bagel | 44.0 | 26.0 | 45.3 | 70.1 | 89.4 | 97.2 | 63.5 | 95.0 | |
| cable gland | 45.3 | 34.1 | 34.3 | 54.4 | 72.2 | 31.6 | 48.3 | 95.9 | |
| carrot | 82.5 | 58.1 | 52.1 | 79.1 | 96.3 | 92.2 | 98.6 | ||
| cookie | 75.5 | 35.1 | 69.7 | 83.5 | 87.1 | 93.9 | 78.0 | 88.0 | |
| dowel | 78.2 | 50.2 | 68.0 | 53.1 | 96.3 | 87.0 | 90.5 | 90.5 | |
| foam | 37.8 | 23.4 | 28.4 | 10.0 | 61.3 | 38.0 | 63.2 | 88.5 | |
| peach | 39.2 | 35.1 | 34.9 | 80.0 | 87.0 | 58.5 | 94.5 | 98.2 | |
| potato | 63.9 | 65.8 | 63.4 | 54.9 | 97.3 | 98.1 | 69.9 | 98.8 | |
| rope | 77.5 | 1.5 | 61.6 | 82.7 | 95.8 | 98.0 | 95.5 | 96.1 | |
| tire | 38.9 | 18.5 | 34.6 | 18.5 | 87.3 | 40.0 | 54.2 | 97.9 |

图5 MRF异常检测结果
Fig. 5 MRF anomaly detection results
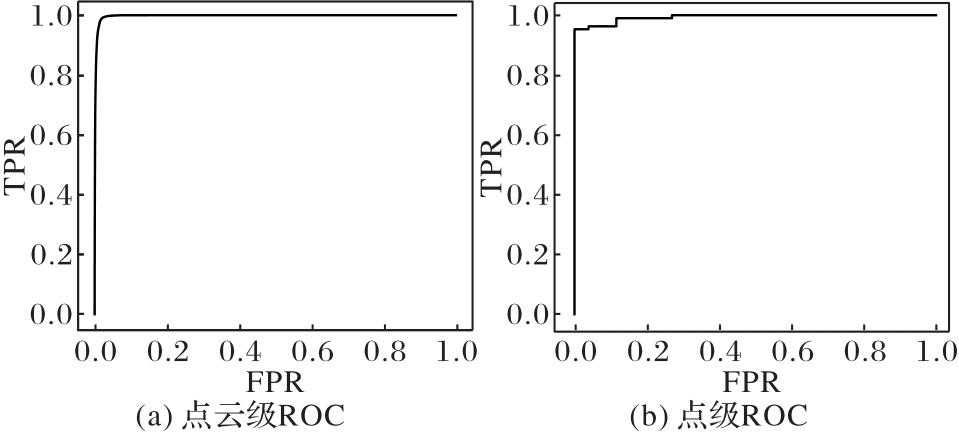
图 6 ROC曲线对比
Fig. 6 Comparison of ROC curves
| 类别 | 仅3D 特征 | 仅2D 特征 | Depth 着色 | Normal 着色 | Uniform 着色 | MRF |
|---|---|---|---|---|---|---|
| 平均 | 82.1 | 95.3 | 92.41 | 94.3 | 93.7 | 97.2 |
| bagel | 94.0 | 97.8 | 92.2 | 97.4 | 98.3 | 99.0 |
| cable gland | 64.0 | 90.2 | 89.9 | 90.4 | 88.8 | 95.6 |
| carrot | 92.2 | 99.2 | 98.5 | 97.5 | 97.8 | 99.2 |
| cookie | 97.1 | 99.3 | 97.6 | 98.9 | 98.7 | 98.9 |
| dowel | 71.2 | 95.8 | 91.2 | 90.4 | 91.7 | 95.7 |
| foam | 79.9 | 85.9 | 86.1 | 85.0 | 84.2 | 90.1 |
| peach | 76.9 | 99.4 | 97.7 | 97.8 | 98.5 | 99.5 |
| potato | 84.2 | 97.9 | 98 | 96.1 | 94.8 | 98.2 |
| rope | 86.4 | 94.7 | 85.6 | 96.0 | 96.1 | 98.2 |
| tire | 75.4 | 93.0 | 87.3 | 94.3 | 88.3 | 97.9 |
表3 不同特征融合设置在MVTec 3D AD数据集上的点云级AUROC ( %)
Tab. 3 Point cloud-level AUROC on MVTec 3D AD dataset with different feature fusion settings
| 类别 | 仅3D 特征 | 仅2D 特征 | Depth 着色 | Normal 着色 | Uniform 着色 | MRF |
|---|---|---|---|---|---|---|
| 平均 | 82.1 | 95.3 | 92.41 | 94.3 | 93.7 | 97.2 |
| bagel | 94.0 | 97.8 | 92.2 | 97.4 | 98.3 | 99.0 |
| cable gland | 64.0 | 90.2 | 89.9 | 90.4 | 88.8 | 95.6 |
| carrot | 92.2 | 99.2 | 98.5 | 97.5 | 97.8 | 99.2 |
| cookie | 97.1 | 99.3 | 97.6 | 98.9 | 98.7 | 98.9 |
| dowel | 71.2 | 95.8 | 91.2 | 90.4 | 91.7 | 95.7 |
| foam | 79.9 | 85.9 | 86.1 | 85.0 | 84.2 | 90.1 |
| peach | 76.9 | 99.4 | 97.7 | 97.8 | 98.5 | 99.5 |
| potato | 84.2 | 97.9 | 98 | 96.1 | 94.8 | 98.2 |
| rope | 86.4 | 94.7 | 85.6 | 96.0 | 96.1 | 98.2 |
| tire | 75.4 | 93.0 | 87.3 | 94.3 | 88.3 | 97.9 |
| 类别 | 仅3D 特征 | 仅2D 特征 | Depth 着色 | Normal 着色 | Uniform 着色 | MRF |
|---|---|---|---|---|---|---|
| 平均 | 90.4 | 93.1 | 92.3 | 92.6 | 93.2 | 94.8 |
| bagel | 92.2 | 95.4 | 93.5 | 94.0 | 94.8 | 96.6 |
| cable gland | 80.7 | 93.9 | 90.0 | 92.8 | 92.6 | 95.9 |
| carrot | 97.1 | 97.6 | 97.5 | 97.3 | 97.4 | 98.1 |
| cookie | 88.1 | 87.3 | 87.6 | 83.8 | 85.5 | 88.0 |
| dowel | 87.7 | 89.2 | 88.5 | 88.6 | 88.5 | 90.5 |
| foam | 83.6 | 85.3 | 86.8 | 86.3 | 87.7 | 88.5 |
| peach | 93.6 | 97.9 | 97.7 | 97.3 | 97.6 | 98.2 |
| potato | 95.4 | 97.7 | 97.7 | 97.5 | 97.4 | 98.2 |
| rope | 94.0 | 90.1 | 88.4 | 94.8 | 95.2 | 96.1 |
| tire | 91.6 | 96.8 | 95.3 | 93.3 | 95.3 | 97.9 |
表4 不同特征融合设置在MVTec 3D AD数据集上的点级AUPRO ( %)
Tab. 4 Point-level AUPRO on MVTec 3D AD dataset with different feature fusion settings
| 类别 | 仅3D 特征 | 仅2D 特征 | Depth 着色 | Normal 着色 | Uniform 着色 | MRF |
|---|---|---|---|---|---|---|
| 平均 | 90.4 | 93.1 | 92.3 | 92.6 | 93.2 | 94.8 |
| bagel | 92.2 | 95.4 | 93.5 | 94.0 | 94.8 | 96.6 |
| cable gland | 80.7 | 93.9 | 90.0 | 92.8 | 92.6 | 95.9 |
| carrot | 97.1 | 97.6 | 97.5 | 97.3 | 97.4 | 98.1 |
| cookie | 88.1 | 87.3 | 87.6 | 83.8 | 85.5 | 88.0 |
| dowel | 87.7 | 89.2 | 88.5 | 88.6 | 88.5 | 90.5 |
| foam | 83.6 | 85.3 | 86.8 | 86.3 | 87.7 | 88.5 |
| peach | 93.6 | 97.9 | 97.7 | 97.3 | 97.6 | 98.2 |
| potato | 95.4 | 97.7 | 97.7 | 97.5 | 97.4 | 98.2 |
| rope | 94.0 | 90.1 | 88.4 | 94.8 | 95.2 | 96.1 |
| tire | 91.6 | 96.8 | 95.3 | 93.3 | 95.3 | 97.9 |
| 类别 | PC AUPRO | 类别 | PC AUPRO |
|---|---|---|---|
| bagel | 98.4 | foam | 96.5 |
| cable gland | 99.0 | peach | 99.7 |
| carrot | 99.7 | potato | 99.7 |
| cookie | 91.5 | rope | 97.1 |
| dowel | 96.9 | tire | 99.6 |
表5 MRF在MVTec 3D AD数据集上的点云级AUROC ( %)
Tab. 5 Point cloud-level AUROC of MRF on MVTec 3D AD dataset
| 类别 | PC AUPRO | 类别 | PC AUPRO |
|---|---|---|---|
| bagel | 98.4 | foam | 96.5 |
| cable gland | 99.0 | peach | 99.7 |
| carrot | 99.7 | potato | 99.7 |
| cookie | 91.5 | rope | 97.1 |
| dowel | 96.9 | tire | 99.6 |
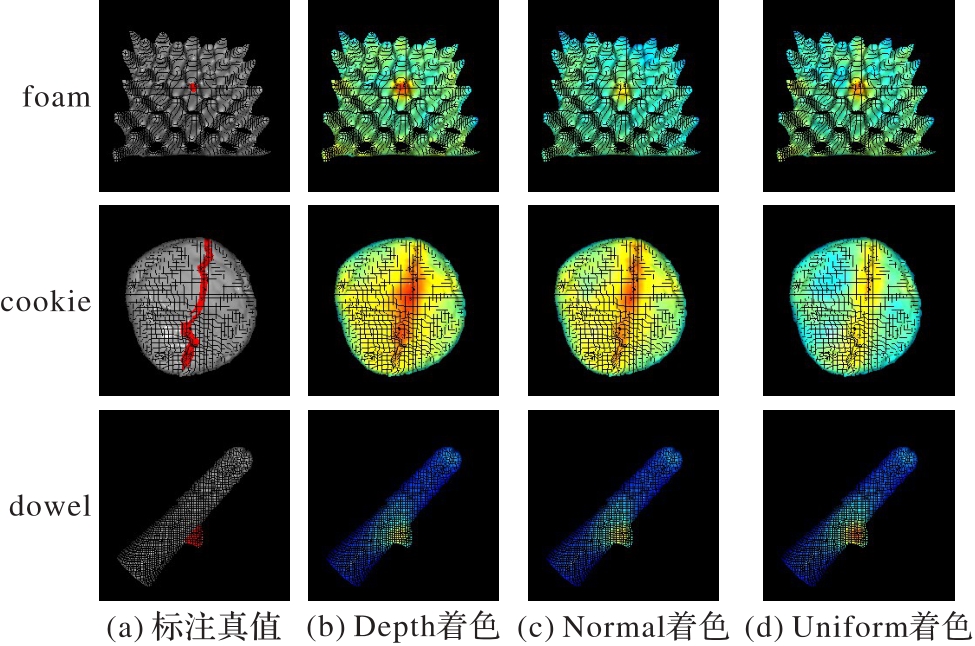
图7 不同着色方案的检测结果
Fig. 7 Detection results of different coloring schemes
| 1 | 刘永江,陈斌. 基于多尺度记忆库的像素级无监督工业异常检测[J].计算机应用, 2024, 44(11): 3587-3594. |
| LIU Y J, CHEN B. Pixel-level unsupervised industrial anomaly detection based on multi-scale memory bank[J]. Journal of Computer Applications, 2024, 44(11): 3587-3594. | |
| 2 | LIU J, XIE G, WANG J, et al. Deep industrial image anomaly detection: a survey[J]. Machine Intelligence Research, 2024, 21(1): 104-135. |
| 3 | SCHÖLKOPF B, PLATT J C, SHAWE-TAYLOR J, et al. Estimating the support of a high-dimensional distribution[J]. Neural Computation, 2001, 13(7): 1443-1471. |
| 4 | BERGMANN P, JIN X, SATTLEGGER D, et al. The MVTec 3D-AD dataset for unsupervised 3D anomaly detection and localization[C]// Proceedings of the 17th International Joint Conference on Computer Vision, Imaging and Computer Graphics Theory and Applications -Volume 5. Setúbal: SciTePress, 2022: 202-213. |
| 5 | SUN J, ZHANG Q, KAILKHURA B, et al. ModelNet40-C: a robustness benchmark for 3D point cloud recognition under corruption[EB/OL]. [2024-08-26].. |
| 6 | YI L, KIM V G, CEYLAN D, et al. A scalable active framework for region annotation in 3D shape collections[J]. ACM Transactions on Graphics, 2016, 35(6): No.210. |
| 7 | DENG J, DONG W, SOCHER R, et al. ImageNet: a large-scale hierarchical image database[C]// Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2009: 248-255. |
| 8 | ROTH K, PEMULA L, ZEPEDA J, et al. Towards total recall in industrial anomaly detection[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 14298-14308. |
| 9 | HORWITZ E, HOSHEN Y. Back to the feature: classical 3D features are (almost) all you need for 3D anomaly detection[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2023: 2968-2977. |
| 10 | LOWE D G. Distinctive image features from scale-invariant keypoints[J]. International Journal of Computer Vision, 2004, 60(2): 91-110. |
| 11 | RUSU R B, BLODOW N, BEETZ M. Fast Point Feature Histograms (FPFH) for 3D registration[C]// Proceedings of the 2009 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2009: 3212-3217. |
| 12 | CAO Y, XU X, SHEN W. Complementary pseudo multimodal feature for point cloud anomaly detection[J]. Pattern Recognition, 2024, 156: No.110761. |
| 13 | SIMARRO VIANA J, DE LA ROSA E, VANDE VYVERE T, et al. Unsupervised 3D brain anomaly detection[C]// Proceedings of the 2020 International MICCAI Brainlesion Workshop, LNCS 12658. Cham: Springer, 2021: 133-142. |
| 14 | BENGS M, BEHRENDT F, KRÜGER J, et al. Three-dimensional deep learning with spatial erasing for unsupervised anomaly segmentation in brain MRI[J]. International Journal of Computer Assisted Radiology and Surgery, 2021, 16(9): 1413-1423. |
| 15 | RUDOLPH M, WEHRBEIN T, ROSENHAHN B, et al. Asymmetric student-teacher networks for industrial anomaly detection[C]// Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2023: 2591-2601. |
| 16 | PAPAMAKARIOS G, NALISNICK E, REZENDE D J, et al. Normalizing flows for probabilistic modeling and inference[J]. Journal of Machine Learning Research, 2021, 22: 1-64. |
| 17 | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| 18 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition[C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. |
| 19 | REISS T, COHEN N, BERGMAN L, et al. PANDA: adapting pretrained features for anomaly detection and segmentation[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 2805-2813. |
| 20 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| 21 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| 22 | PANG Y, WANG W, TAY F E H, et al. Masked autoencoders for point cloud self-supervised learning[C]// Proceedings of the 2022 European Conference on Computer Vision, LNCS 13662. Cham: Springer, 2022: 604-621. |
| 23 | AO S, HU Q, YANG B, et al. SpinNet: learning a general surface descriptor for 3D point cloud registration[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 11748-11757. |
| 24 | BERGMANN P, FAUSER M, SATTLEGGER D, et al. MVTec AD — a comprehensive real-world dataset for unsupervised anomaly detection[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 9584-9592. |
| 25 | ZHOU Q Y, PARK J, KOLTUN V. Open 3D: modern library fora 3D data processing[EB/OL]. [2024-11-26].. |
| 26 | FISCHLER M A, BOLLES R C. Random sample consensus: a paradigm for model fitting with applications to image analysis and automated cartography[J]. Communications of the ACM, 1981, 24(6): 381-395. |
| 27 | CHANG A X, FUNKHOUSER T, GUIBAS L, et al. ShapeNet: an information-rich 3D model repository[EB/OL]. [2024-08-22].. |
| 28 | YU X, TANG L, RAO Y, et al. Point-BERT: pre-training 3D point cloud Transformers with masked point modeling[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 19291-19300. |
| 29 | BERGMANN P, SATTLEGGER D. Anomaly detection in 3D point clouds using deep geometric descriptors[C]// Proceedings of the 2023 IEEE/CVF Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2023: 2612-2622. |
| [1] | 陈凯, 叶海良, 曹飞龙. 基于局部-全局交互与结构Transformer的点云分类算法[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1671-1676. |
| [2] | 文诗佳, 金世俊. 结合目标检测和特征点关联的动态视觉SLAM算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 610-615. |
| [3] | 梁杰涛, 罗兵, 付兰慧, 常青玲, 李楠楠, 易宁波, 冯其, 何鑫, 邓辅秦. 基于坐标几何采样的点云配准方法[J]. 《计算机应用》唯一官方网站, 2025, 45(1): 214-222. |
| [4] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [5] | 付帅, 郭小英, 白茹意, 闫涛, 陈斌. 改进的CloFormer模型与有序回归相结合的年龄评估方法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2372-2380. |
| [6] | 施赛龙, 方智文. 基于多尺度聚合和共享注意力的注视估计模型[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2047-2054. |
| [7] | 高文烁, 陈晓云. 基于节点结构的点云分类网络[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1471-1478. |
| [8] | 孙子文, 钱立志, 杨传栋, 高一博, 陆庆阳, 袁广林. 基于Transformer的视觉目标跟踪方法综述[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1644-1654. |
| [9] | 韩贵金, 张馨渊, 张文涛, 黄娅. 基于多特征融合的自监督图像配准算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1597-1604. |
| [10] | 张鹏飞, 韩李涛, 冯恒健, 李洪梅. 基于注意力机制和全局特征优化的点云语义分割[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1086-1092. |
| [11] | 庞玉东, 李志星, 刘伟杰, 李天昊, 王宁宁. 基于改进实时检测Transformer的塔机上俯视场景小目标检测模型[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3922-3929. |
| [12] | 刘永江, 陈斌. 基于多尺度记忆库的像素级无监督工业异常检测[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3587-3594. |
| [13] | 柴汶泽, 范菁, 孙书魁, 梁一鸣, 刘竟锋. 深度度量学习综述[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 2995-3010. |
| [14] | 宋郁珉, 孙浩, 李湛, 李长安, 乔晓澍. 基于非完整点云法线滤波补偿的散货船舶舱口识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 324-330. |
| [15] | 杨国威, 陈绮帆, 刘新月, 王校阳. 基于三维点云处理的髋臼锉锉齿尺寸分析[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 285-291. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||