


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (5): 1671-1676.DOI: 10.11772/j.issn.1001-9081.2024050572
• 多媒体计算与计算机仿真 • 上一篇
陈凯, 叶海良, 曹飞龙( )
)
收稿日期:2024-05-09
修回日期:2024-06-24
接受日期:2024-06-26
发布日期:2024-07-25
出版日期:2025-05-10
通讯作者:
曹飞龙
作者简介:陈凯(1998—),男,浙江杭州人,硕士研究生,主要研究方向:深度学习、计算机视觉基金资助:
Kai CHEN, Hailiang YE, Feilong CAO()
Received:2024-05-09
Revised:2024-06-24
Accepted:2024-06-26
Online:2024-07-25
Published:2025-05-10
Contact:
Feilong CAO
About author:CHEN Kai, born in 1998, M. S. candidate. His research interests include deep learning, computer vision.Supported by:摘要:
针对点云分类特征提取过程中局部与全局特征提取不充分的问题,提出一种局部-全局交互与结构Transformer的点云分类算法。首先,提出双支并行的局部-全局交互框架并分别提取局部特征和全局特征,其中一支用最大池化与卷积提取局部特征,另一支用平均池化与Transformer提取全局特征。同时,考虑Transformer中位置信息的重要性,提出结构Transformer,以多次应用位置信息与当前特征的交互,进一步增强全局结构特征。最后,利用局部-全局特征进行分类,以完成点云的分类任务。实验结果表明,所提算法在ModelNet40和ScanObjectNN数据集上分别获得了93.6%和87.5%的总体准确率(OA)。可见,所提出的局部-全局交互与结构Transformer网络在点云分类任务中取得了良好的性能。
中图分类号:
陈凯, 叶海良, 曹飞龙. 基于局部-全局交互与结构Transformer的点云分类算法[J]. 计算机应用, 2025, 45(5): 1671-1676.
Kai CHEN, Hailiang YE, Feilong CAO. Classification algorithm for point cloud based on local-global interaction and structural Transformer[J]. Journal of Computer Applications, 2025, 45(5): 1671-1676.
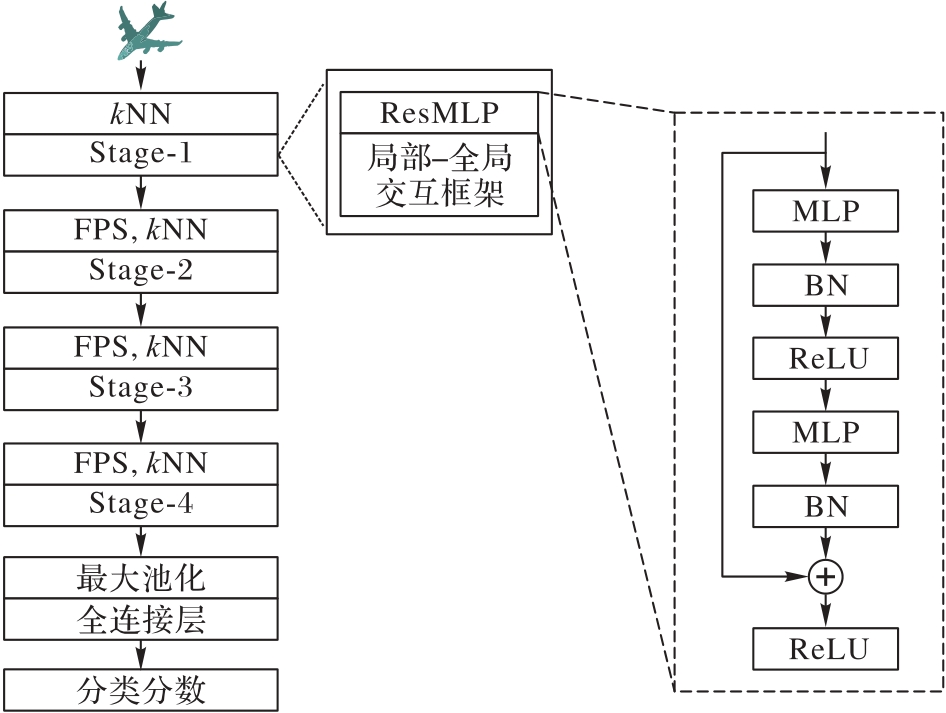
图1 LGSTNet的框架
Fig. 1 Framework of LGSTNet
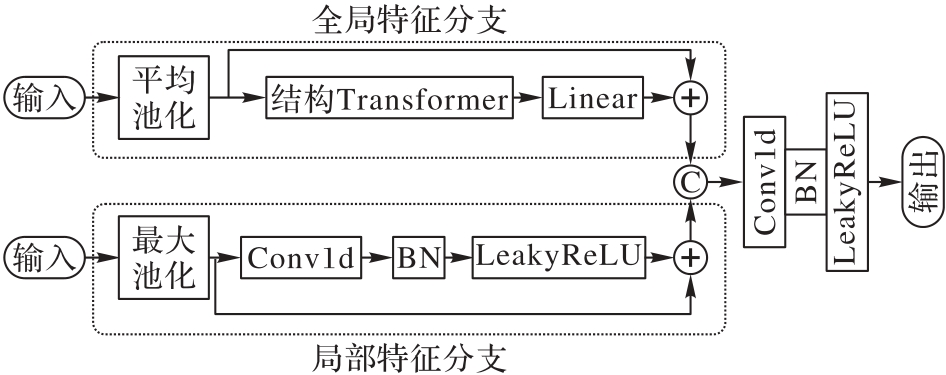
图2 局部-全局交互框架
Fig. 2 Local-global interaction framework
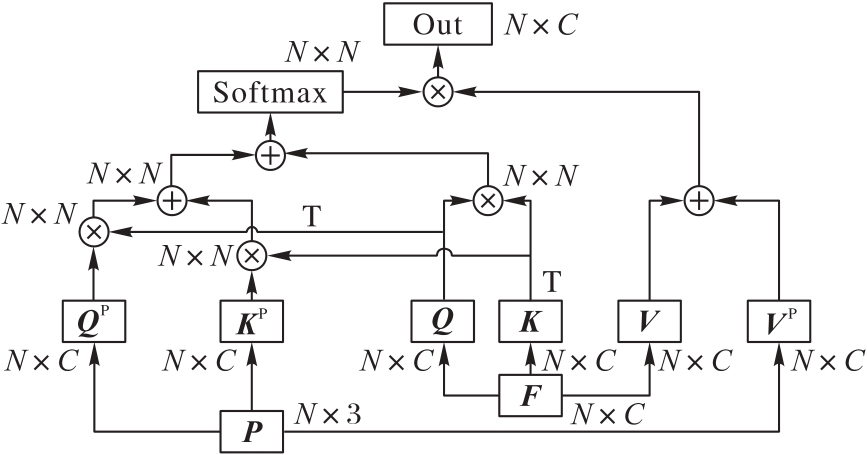
图3 结构Transformer模块
Fig. 3 Structural Transformer module
| 算法 | 输入格式 | 输入点数 | mAcc/% | OA/% |
|---|---|---|---|---|
| PointNet[2017] | 坐标 | 1 024 | 86.0 | 89.2 |
| PointNet++[2017] | 坐标+法向量 | 5 000 | — | 91.9 |
| RS-CNN[2019] | 坐标 | 1 024 | — | 92.9 |
| DGCNN[2019] | 坐标 | 1 024 | 90.2 | 92.9 |
| KPConv[2019] | 坐标 | 6 800 | — | 92.9 |
| DRNet [2021] | 坐标 | 1 024 | — | 93.1 |
| PRA-Net[2021] | 坐标 | 1 024 | 90.6 | 93.2 |
| PCT [2021] | 坐标 | 1 024 | — | 93.2 |
| CT [2021] | 坐标 | 1 024 | 90.8 | 93.1 |
| Point-BERT[2022] | 坐标 | 1 024 | — | 93.2 |
| PatchFormer[2022] | 坐标 | 1 024 | — | 93.2 |
| CSANet[2022] | 坐标 | 1 024 | 89.9 | 92.8 |
| LFT-Net[2023] | 坐标+法向量 | 1 024 | 89.7 | 93.2 |
| AGConv[2023] | 坐标 | 1 024 | 90.7 | 93.4 |
| LGSTNet | 坐标 | 1 024 | 90.8 | 93.6 |
表1 ModelNet40数据集上的分类性能对比
Tab. 1 Classification performance comparison on ModelNet40 dataset
| 算法 | 输入格式 | 输入点数 | mAcc/% | OA/% |
|---|---|---|---|---|
| PointNet[2017] | 坐标 | 1 024 | 86.0 | 89.2 |
| PointNet++[2017] | 坐标+法向量 | 5 000 | — | 91.9 |
| RS-CNN[2019] | 坐标 | 1 024 | — | 92.9 |
| DGCNN[2019] | 坐标 | 1 024 | 90.2 | 92.9 |
| KPConv[2019] | 坐标 | 6 800 | — | 92.9 |
| DRNet [2021] | 坐标 | 1 024 | — | 93.1 |
| PRA-Net[2021] | 坐标 | 1 024 | 90.6 | 93.2 |
| PCT [2021] | 坐标 | 1 024 | — | 93.2 |
| CT [2021] | 坐标 | 1 024 | 90.8 | 93.1 |
| Point-BERT[2022] | 坐标 | 1 024 | — | 93.2 |
| PatchFormer[2022] | 坐标 | 1 024 | — | 93.2 |
| CSANet[2022] | 坐标 | 1 024 | 89.9 | 92.8 |
| LFT-Net[2023] | 坐标+法向量 | 1 024 | 89.7 | 93.2 |
| AGConv[2023] | 坐标 | 1 024 | 90.7 | 93.4 |
| LGSTNet | 坐标 | 1 024 | 90.8 | 93.6 |
| 算法 | mAcc/% | OA/% |
|---|---|---|
| PointNet[2017] | 63.4 | 68.2 |
| PointNet++[2017] | 75.4 | 77.9 |
| DGCNN[2019] | 73.6 | 78.1 |
| MVTN[2021] | — | 82.8 |
| DRNet[2021] | 78.0 | 80.3 |
| CT[2021] | 83.1 | 85.5 |
| PointFormer[2022] | 78.9 | 81.1 |
| Point-BERT[2022] | — | 83.1 |
| PointMLP[2022] | 83.9 | 85.4 |
| RepSurf-U[2022] | 83.1 | 86.0 |
| GLSCN[2023] | 84.1 | 85.8 |
| Point-PN[2023] | — | 87.1 |
| LGSTNet | 86.5 | 87.5 |
表2 ScanObjectNN数据集上的分类性能对比
Tab. 2 Classification performance comparison on ScanObjectNN dataset
| 算法 | mAcc/% | OA/% |
|---|---|---|
| PointNet[2017] | 63.4 | 68.2 |
| PointNet++[2017] | 75.4 | 77.9 |
| DGCNN[2019] | 73.6 | 78.1 |
| MVTN[2021] | — | 82.8 |
| DRNet[2021] | 78.0 | 80.3 |
| CT[2021] | 83.1 | 85.5 |
| PointFormer[2022] | 78.9 | 81.1 |
| Point-BERT[2022] | — | 83.1 |
| PointMLP[2022] | 83.9 | 85.4 |
| RepSurf-U[2022] | 83.1 | 86.0 |
| GLSCN[2023] | 84.1 | 85.8 |
| Point-PN[2023] | — | 87.1 |
| LGSTNet | 86.5 | 87.5 |
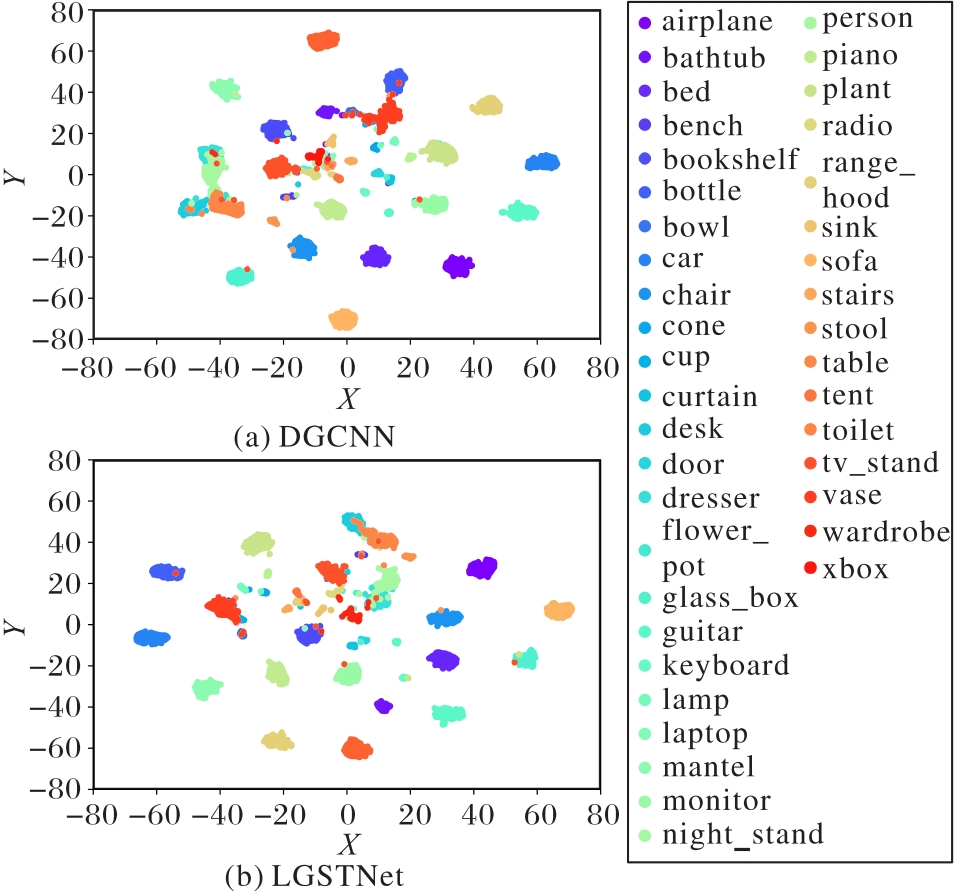
图4 ModelNet40数据集上t-SNE的可视化对比
Fig. 4 t-SNE visual comparison on ModelNet40 dataset

图5 ScanObjectNN数据集上t-SNE的可视化对比
Fig. 5 t-SNE visual comparison on ScanObjectNN dataset
| 模型 | 局部-全局交互框架 | 结构Transformer | OA/% | mAcc/% | |
|---|---|---|---|---|---|
| 局部特征分支 | 全局特征分支 | ||||
| A | √ | 86.0 | 84.5 | ||
| B | √ | 80.7 | 77.8 | ||
| C | √ | √ | 86.7 | 85.2 | |
| D | √ | √ | √ | 87.5 | 86.5 |
表3 模块消融实验结果
Tab. 3 Module ablation experimental results
| 模型 | 局部-全局交互框架 | 结构Transformer | OA/% | mAcc/% | |
|---|---|---|---|---|---|
| 局部特征分支 | 全局特征分支 | ||||
| A | √ | 86.0 | 84.5 | ||
| B | √ | 80.7 | 77.8 | ||
| C | √ | √ | 86.7 | 85.2 | |
| D | √ | √ | √ | 87.5 | 86.5 |
| 算法 | 参数量/106 | 吞吐量/(shape· | GFLOPs | OA/% |
|---|---|---|---|---|
| PointNet | 3.47 | 518 | 0.45 | 68.2 |
| PointNet++ | 1.74 | 29 | 4.03 | 77.9 |
| DGCNN | 1.81 | 104 | 2.43 | 78.1 |
| CT | 22.91 | 16 | 12.69 | 85.5 |
| PointFormer | 3.99 | 94 | 3.48 | 81.1 |
| PointMLP | 12.60 | 19 | 15.70 | 85.5 |
| LGSTNet | 4.96 | 151 | 3.36 | 87.5 |
表4 不同算法在ScanObjectNN数据集上的复杂性对比
Tab. 4 Complexity comparison of different algorithms on ScanObjectNN dataset
| 算法 | 参数量/106 | 吞吐量/(shape· | GFLOPs | OA/% |
|---|---|---|---|---|
| PointNet | 3.47 | 518 | 0.45 | 68.2 |
| PointNet++ | 1.74 | 29 | 4.03 | 77.9 |
| DGCNN | 1.81 | 104 | 2.43 | 78.1 |
| CT | 22.91 | 16 | 12.69 | 85.5 |
| PointFormer | 3.99 | 94 | 3.48 | 81.1 |
| PointMLP | 12.60 | 19 | 15.70 | 85.5 |
| LGSTNet | 4.96 | 151 | 3.36 | 87.5 |
| k | mAcc/% | OA/% | k | mAcc/% | OA/% |
|---|---|---|---|---|---|
| 8 | 81.8 | 84.0 | 20 | 84.8 | 86.7 |
| 12 | 83.3 | 85.4 | 24 | 84.8 | 86.6 |
| 16 | 86.5 | 87.5 |
表5 k在ScanObjectNN数据集上对性能的影响
Tab. 5 Influence of k on performance on ScanObjectNN dataset
| k | mAcc/% | OA/% | k | mAcc/% | OA/% |
|---|---|---|---|---|---|
| 8 | 81.8 | 84.0 | 20 | 84.8 | 86.7 |
| 12 | 83.3 | 85.4 | 24 | 84.8 | 86.6 |
| 16 | 86.5 | 87.5 |
| i | mAcc/% | OA/% | 参数量/106 |
|---|---|---|---|
| 3 | 84.6 | 85.6 | 1.40 |
| 4 | 86.5 | 87.5 | 4.96 |
| 5 | 85.6 | 87.5 | 18.89 |
表6 i在ScanObjectNN数据集上对性能的影响
Tab. 6 Influence of i on performance on ScanObjectNN dataset
| i | mAcc/% | OA/% | 参数量/106 |
|---|---|---|---|
| 3 | 84.6 | 85.6 | 1.40 |
| 4 | 86.5 | 87.5 | 4.96 |
| 5 | 85.6 | 87.5 | 18.89 |
| 1 | ZHENG C, YAN X, ZHANG H, et al. Beyond 3D Siamese tracking: a motion-centric paradigm for 3D single object tracking in point clouds[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 8101-8110. |
| 2 | CHEN X, MA H, WAN J, et al. Multi-view 3D object detection network for autonomous driving[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6526-6534. |
| 3 | TU C, TAKEUCHI E, CARBALLO A, et al. Point cloud compression for 3D LiDAR sensor using recurrent neural network with residual blocks[C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 3274-3280. |
| 4 | SU H, MAJI S, KALOGERAKIS E, et al. Multi-view convolutional neural networks for 3D shape recognition[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 945-953. |
| 5 | MATURANA D, SCHERER S. VoxNet: a 3D convolutional neural network for real-time object recognition[C]// Proceedings of the 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2015: 922-928. |
| 6 | HAMDI A, GIANCOLA S, GHANEM B. MVTN: multi-view transformation network for 3D shape recognition[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 1-11. |
| 7 | QI C R, SU H, MO K, et al. PointNet: deep learning on point sets for 3D classification and segmentation[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 77-85. |
| 8 | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| 9 | MA X, QIN C, YOU H, et al. Rethinking network design and local geometry in point cloud: a simple residual MLP framework[EB/OL]. [2024-10-22].. |
| 10 | ZHANG R, WANG L, WANG Y, et al. Starting from non-parametric networks for 3D point cloud analysis[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 5344-5353. |
| 11 | WEI M, WEI Z, ZHOU H, et al. AGConv: adaptive graph convolution on 3D point clouds[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(8): 9374-9392. |
| 12 | THOMAS H, QI C R, DESCHAUD J E, et al. KPConv: flexible and deformable convolution for point clouds[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6410-6419. |
| 13 | LIU Y, FAN B, XIANG S, et al. Relation-shape convolutional neural network for point cloud analysis[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 8887-8896. |
| 14 | SIMONOVSKY M, KOMODAKIS N. Dynamic edge-conditioned filters in convolutional neural networks on graphs[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 29-38. |
| 15 | DU Z, YE H, CAO F. A novel local-global graph convolutional method for point cloud semantic segmentation[J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(4): 4798-4812. |
| 16 | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| 17 | QIU S, ANWAR S, BARNES N. Dense-resolution network for point cloud classification and segmentation[C]// Proceedings of the 2021 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2021: 3812-3821. |
| 18 | RAN H, LIU J, WANG C. Surface representation for point clouds[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 18920-18930. |
| 19 | LIANG J, DU Z, LIANG J, et al. Long and short-range dependency graph structure learning framework on point cloud[J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2023, 45(12): 14975-14989. |
| 20 | VASWANI A, SHAZEER N, PARMAR N, et al. Attention is all you need[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 6000-6010. |
| 21 | BROWN T B, MANN B, RYDER N, et al. Language models are few-shot learners[C]// Proceedings of the 34th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2020: 1877-1901. |
| 22 | DOSOVITSKIY A, BEYER L, KOLESNIKOV A, et al. An image is worth 16x16 words: Transformers for image recognition at scale[EB/OL]. [2024-10-22].. |
| 23 | WANG W, XIE E, LI X, et al. Pyramid vision Transformer: a versatile backbone for dense prediction without convolutions[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 548-558. |
| 24 | WU H, XIAO B, CODELLA N, et al. CVT: introducing convolutions to vision Transformers[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 22-31. |
| 25 | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| 26 | GUO M H, CAI J X, LIU Z N, et al. PCT: point cloud Transformer[J]. Computational Visual Media, 2021, 7(2): 187-199. |
| 27 | WANG G, ZHAI Q, LIU H. Cross self-attention network for 3D point cloud[J]. Knowledge-Based Systems, 2022, 247: No.108769. |
| 28 | YU X, TANG L, RAO Y, et al. Point-BERT: pre-training 3D point cloud Transformers with masked point modeling[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 19291-19300. |
| 29 | CHENG S, CHEN X, HE X, et al. PRA-Net: point relation-aware network for 3D point cloud analysis[J]. IEEE Transactions on Image Processing, 2021, 30: 4436-4448. |
| 30 | CHEN Y, YANG Z, ZHENG X, et al. PointFormer: a dual perception attention-based network for point cloud classification[C]// Proceedings of the Asian Conference on Computer Vision, LNCS 13841. Cham: Springer, 2023: 432-449. |
| 31 | MAZUR K, LEMPITSKY V. Cloud Transformers: a universal approach to point cloud processing tasks[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 10695-10704. |
| 32 | ZHOU W, ZHAO Y, XIAO Y, et al. TNPC: Transformer-based network for point cloud classification[J]. Expert Systems with Applications, 2024, 239: No.122438. |
| 33 | ZHANG C, WAN H, SHEN X, et al. PatchFormer: an efficient point Transformer with patch attention[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 11789-11798. |
| 34 | GAO Y, LIU X, LI J, et al. LFT-Net: local feature Transformer network for point clouds analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 2158-2168. |
| 35 | LAI X, LIU J, JIANG L, et al. Stratified Transformer for 3D point cloud segmentation[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 8490-8499. |
| 36 | LIU Z, LIN Y, CAO Y, et al. Swin Transformer: hierarchical vision Transformer using shifted windows[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 9992-10002. |
| 37 | WU K, PENG H, CHEN M, et al. Rethinking and improving relative position encoding for Vision Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 10013-10021. |
| 38 | SI C, YU W, ZHOU P, et al. Inception Transformer[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2022: 23495-23509. |
| 39 | WU Z, SONG S, KHOSLA A, et al. 3D ShapeNets: a deep representation for volumetric shapes[C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1912-1920. |
| 40 | UY M A, PHAM Q H, HUA B S, et al. Revisiting point cloud classification: a new benchmark dataset and classification model on real-world data[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 1588-1597. |
| 41 | VAN DER MAATEN L, HINTON G. Visualizing data using t-SNE[J]. Journal of Machine Learning Research, 2008, 9: 2579-2605. |
| [1] | 王文鹏, 秦寅畅, 师文轩. 工业缺陷检测无监督深度学习方法综述[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1658-1670. |
| [2] | 李雪莹, 杨琨, 涂国庆, 刘树波. 基于局部增强的时序数据对抗样本生成方法[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1573-1581. |
| [3] | 牛四杰, 刘昱良. 基于知识蒸馏双分支结构的视网膜病变辅助诊断方法[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1410-1414. |
| [4] | 王丹, 张文豪, 彭丽娟. 基于深度学习的智能反射面辅助通信系统信道估计[J]. 《计算机应用》唯一官方网站, 2025, 45(5): 1613-1618. |
| [5] | 周阳, 李辉. 基于语义和细节特征双促进的遥感影像建筑物提取网络[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1310-1316. |
| [6] | 潘理虎, 彭守信, 张睿, 薛之洋, 毛旭珍. 面向运动前景区域的视频异常检测[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1300-1309. |
| [7] | 王一丁, 王泽浩, 李耀利, 蔡少青, 袁媛. 多尺度2D-Adaboost的中药材粉末显微图像识别算法[J]. 《计算机应用》唯一官方网站, 2025, 45(4): 1325-1332. |
| [8] | 薛振华, 李强, 黄超. 视觉基础模型驱动的像素级图像异常检测方法[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 823-831. |
| [9] | 陈瑞龙, 胡涛, 卜佑军, 伊鹏, 胡先君, 乔伟. 面向加密恶意流量检测模型的堆叠集成对抗防御方法[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 864-871. |
| [10] | 洪梓榕, 包广清. 基于集成学习的雷达自动目标识别综述[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 371-382. |
| [11] | 张众维, 王俊, 刘树东, 王志恒. 多尺度特征融合与加权框融合的遥感图像目标检测[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 633-639. |
| [12] | 邓淼磊, 阚雨培, 孙川川, 徐海航, 樊少珺, 周鑫. 基于深度学习的网络入侵检测系统综述[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 453-466. |
| [13] | 余松森, 林智凡, 薛国鹏, 徐建宇. 基于改进YOLOv8的轻量级大幅面瓷砖缺陷检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 647-654. |
| [14] | 丁丹妮, 彭博, 吴锡. 受腹侧通路启发的脂肪肝超声图像分类方法VPNet[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 662-669. |
| [15] | 李严, 叶冠华, 李雅文, 梁美玉. 基于丰度协调技术的企业ESG指标预测模型[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 670-676. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||