


《计算机应用》唯一官方网站 ›› 2026, Vol. 46 ›› Issue (2): 604-612.DOI: 10.11772/j.issn.1001-9081.2025020234
• 多媒体计算与计算机仿真 • 上一篇
韩锋1, 卜永丰1, 梁浩翔2( ), 黄舒雯1, 张朝阳1(), 孙士杰3
), 黄舒雯1, 张朝阳1(), 孙士杰3
收稿日期:2025-03-10
修回日期:2025-05-26
接受日期:2025-05-28
发布日期:2025-06-10
出版日期:2026-02-10
通讯作者:
梁浩翔,张朝阳
作者简介:韩锋(2001—),男,山西吕梁人,硕士研究生,CCF会员,主要研究方向:计算机视觉、异常检测基金资助:
Feng HAN1, Yongfeng BU1, Haoxiang LIANG2(), Shuwen HUANG1, Zhaoyang ZHANG1(), Shijie SUN3
Received:2025-03-10
Revised:2025-05-26
Accepted:2025-05-28
Online:2025-06-10
Published:2026-02-10
Contact:
Haoxiang LIANG, Zhaoyang ZHANG
About author:HAN Feng, born in 2001, M. S. candidate. His research interests include computer vision, anomaly detection.Supported by:摘要:
针对智能交通系统中车辆轨迹异常检测的复杂性和动态性,提出一种基于多层次时空交互依赖的动态图(MSTIDG)的车辆轨迹异常检测方法DSTGRU(Dynamic Spatio-Temporal Gated Recurrent Unit)。DSTGRU通过构建短期和长期时空交互依赖的动态图,有效地捕捉车辆间的复杂交互关系。在这个过程中,引入多层次时空交互特征融合(MSF-BiGRU)模块融合多层次时空特征,以在不同尺度上融合时空信息,从而缓解共享信息提取时的冲突并增强模型的鲁棒性,进而提升对异常轨迹的识别能力。实验结果表明,DSTGRU在TrackRisk和HighD数据集上的异常检测精度显著优于现有方法DiffTAD与ImDiffusion,Pre@100分别达到了0.90和0.89,AUROC分别达到了0.913和0.827。与现有方法对比,DSTGRU在多项评价指标上均排名第一。此外,DSTGRU在复杂场景中表现出较强鲁棒性,并能准确识别异常行为,为智能交通系统中的轨迹异常检测提供了解决方案。
中图分类号:
韩锋, 卜永丰, 梁浩翔, 黄舒雯, 张朝阳, 孙士杰. 基于多层次时空交互依赖的车辆轨迹异常检测[J]. 计算机应用, 2026, 46(2): 604-612.
Feng HAN, Yongfeng BU, Haoxiang LIANG, Shuwen HUANG, Zhaoyang ZHANG, Shijie SUN. Vehicle trajectory anomaly detection based on multi-level spatio-temporal interaction dependency[J]. Journal of Computer Applications, 2026, 46(2): 604-612.
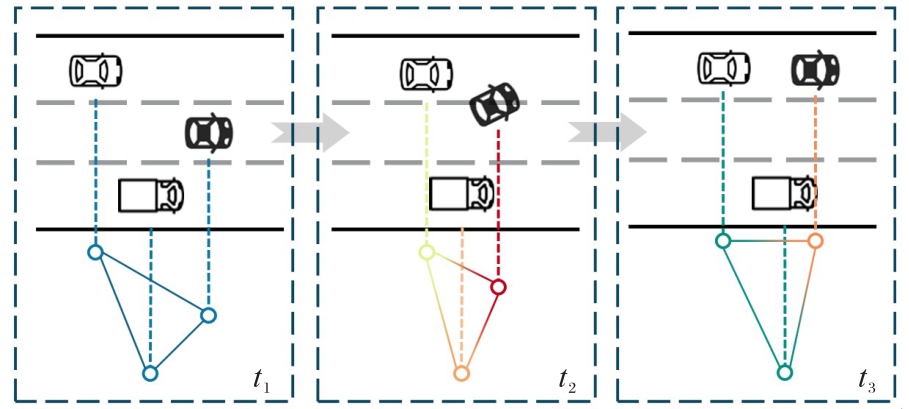
图1 车辆交互异常检测动态图的示例
Fig. 1 Example of dynamic graph for vehicle interaction anomaly detection
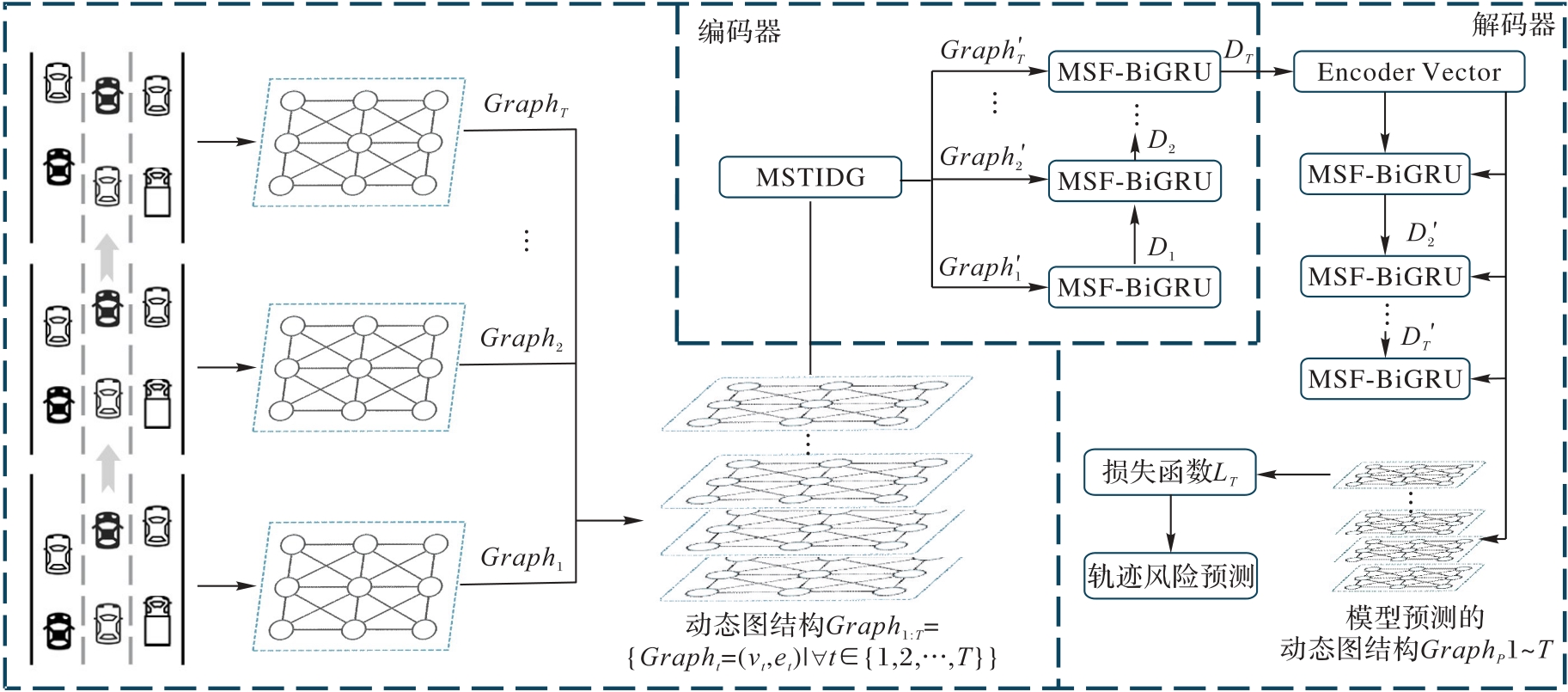
图2 DSTGRU的网络结构
Fig. 2 Network structure of DSTGRU
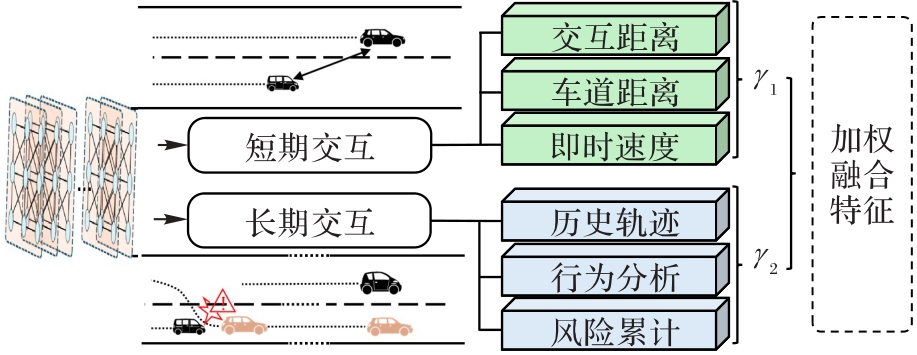
图3 多层次时空交互依赖的动态图
Fig. 3 Multi-level spatio-temporal interaction dependency graph
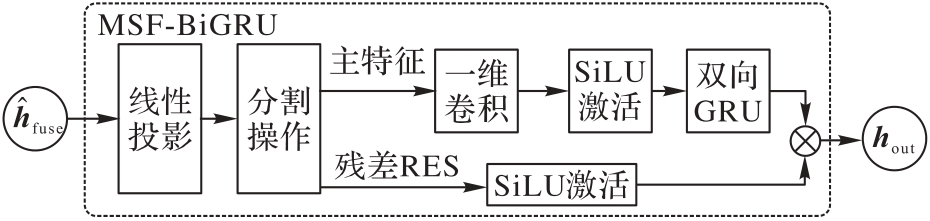
图4 MSF-BiGRU模块的结构
Fig. 4 Structure of MSF-BiGRU module
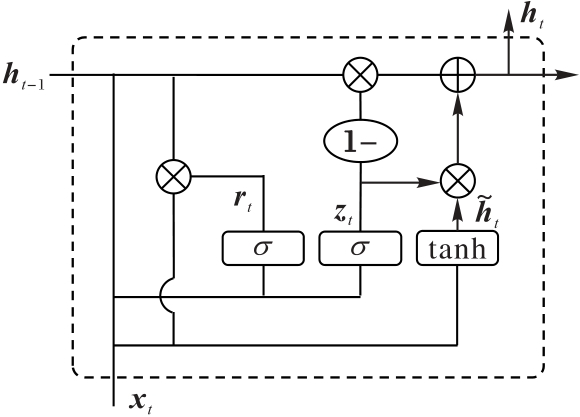
图5 GRU模块的结构
Fig. 5 Structure of GRU module
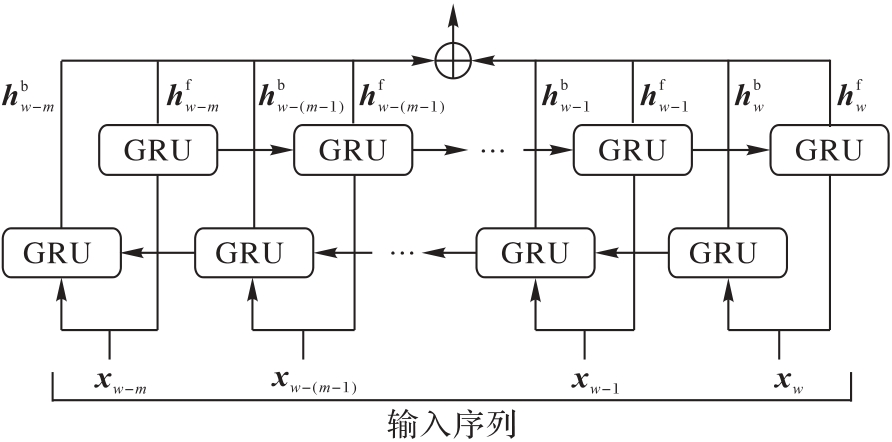
图6 BiGRU模块的结构
Fig. 6 Structure of BiGRU module
| 属性 | 值 |
|---|---|
| 数据记录总时长/h | 12 |
| 车辆行驶记录距离/m | 525~700 |
| 车道数量 | 2~4 |
| 车辆总数 | 76 194 |
| 乘用车数量 | 58 656 |
| 商用车数量 | 17 538 |
| 车辆记录总行驶时间/h | 328 |
| 车辆总行驶距离/km | 33 439 |
| 隧道内平均车速分布/(km·h -1) | 70~80 |
| 高速公路平均车速分布/(km·h -1) | 90~120 |
| 轨迹点数据采样频率/s | 0.3 |
| 轨迹数量 | 684 630 |
表1 TrackRisk数据集中详细参数的统计信息
Tab. 1 Detailed parameter statistics in TrackRisk dataset
| 属性 | 值 |
|---|---|
| 数据记录总时长/h | 12 |
| 车辆行驶记录距离/m | 525~700 |
| 车道数量 | 2~4 |
| 车辆总数 | 76 194 |
| 乘用车数量 | 58 656 |
| 商用车数量 | 17 538 |
| 车辆记录总行驶时间/h | 328 |
| 车辆总行驶距离/km | 33 439 |
| 隧道内平均车速分布/(km·h -1) | 70~80 |
| 高速公路平均车速分布/(km·h -1) | 90~120 |
| 轨迹点数据采样频率/s | 0.3 |
| 轨迹数量 | 684 630 |
| 模型 | TrackRisk | HighD | ||||||
|---|---|---|---|---|---|---|---|---|
| Pre@100(↑) | Pre@300(↑) | Avg Pre(↑) | AUROC(↑) | Pre@100(↑) | Pre@300(↑) | Avg Pre(↑) | AUROC(↑) | |
| CVM | 0.18 | 0.143 | 0.095 | 0.607 | 0.12 | 0.078 | 0.081 | 0.533 |
| LTI | 0.24 | 0.208 | 0.099 | 0.631 | 0.20 | 0.182 | 0.092 | 0.542 |
| TOP-EYE | 0.32 | 0.308 | 0.211 | 0.742 | 0.22 | 0.190 | 0.156 | 0.602 |
| Seq2Seq | 0.61 | 0.448 | 0.142 | 0.765 | 0.50 | 0.418 | 0.127 | 0.627 |
| STGAE | 0.21 | 0.192 | 0.097 | 0.648 | 0.46 | 0.443 | 0.180 | 0.675 |
| ImDiffusion | 0.78 | 0.641 | 0.293 | 0.812 | 0.67 | 0.568 | 0.252 | 0.788 |
| DiffTAD | 0.88 | 0.681 | 0.298 | 0.902 | 0.82 | 0.736 | 0.263 | 0.803 |
| DSTGRU | 0.90 | 0.723 | 0.348 | 0.913 | 0.89 | 0.848 | 0.299 | 0.827 |
表2 各模型在综合场景下的车辆轨迹异常检测对比
Tab. 2 Comparison of vehicle trajectory anomaly detection in comprehensive scenarios among various models
| 模型 | TrackRisk | HighD | ||||||
|---|---|---|---|---|---|---|---|---|
| Pre@100(↑) | Pre@300(↑) | Avg Pre(↑) | AUROC(↑) | Pre@100(↑) | Pre@300(↑) | Avg Pre(↑) | AUROC(↑) | |
| CVM | 0.18 | 0.143 | 0.095 | 0.607 | 0.12 | 0.078 | 0.081 | 0.533 |
| LTI | 0.24 | 0.208 | 0.099 | 0.631 | 0.20 | 0.182 | 0.092 | 0.542 |
| TOP-EYE | 0.32 | 0.308 | 0.211 | 0.742 | 0.22 | 0.190 | 0.156 | 0.602 |
| Seq2Seq | 0.61 | 0.448 | 0.142 | 0.765 | 0.50 | 0.418 | 0.127 | 0.627 |
| STGAE | 0.21 | 0.192 | 0.097 | 0.648 | 0.46 | 0.443 | 0.180 | 0.675 |
| ImDiffusion | 0.78 | 0.641 | 0.293 | 0.812 | 0.67 | 0.568 | 0.252 | 0.788 |
| DiffTAD | 0.88 | 0.681 | 0.298 | 0.902 | 0.82 | 0.736 | 0.263 | 0.803 |
| DSTGRU | 0.90 | 0.723 | 0.348 | 0.913 | 0.89 | 0.848 | 0.299 | 0.827 |
| 模型 | TrackRisk | HighD | ||||||
|---|---|---|---|---|---|---|---|---|
| Pre@100(↑) | Pre@300(↑) | Avg Pre(↑) | AUROC(↑) | Pre@100(↑) | Pre@300(↑) | Pre@100(↑) | AUROC(↑) | |
| CVM | 0.70 | 0.625 | 0.668 | 0.708 | 0.61 | 0.612 | 0.648 | 0.695 |
| LTI | 0.85 | 0.837 | 0.695 | 0.722 | 0.75 | 0.695 | 0.628 | 0.677 |
| TOP-EYE | 0.87 | 0.797 | 0.721 | 0.735 | 0.76 | 0.781 | 0.659 | 0.688 |
| Seq2Seq | 0.86 | 0.868 | 0.738 | 0.741 | 0.77 | 0.815 | 0.688 | 0.719 |
| STGAE | 0.82 | 0.752 | 0.655 | 0.672 | 0.72 | 0.703 | 0.636 | 0.608 |
| ImDiffusion | 0.84 | 0.767 | 0.738 | 0.812 | 0.82 | 0.814 | 0.754 | 0.792 |
| DiffTAD | 0.94 | 0.925 | 0.849 | 0.898 | 0.84 | 0.862 | 0.773 | 0.844 |
| DSTGRU | 0.95 | 0.935 | 0.856 | 0.905 | 0.87 | 0.883 | 0.797 | 0.885 |
表3 各模型在异常场景下的车辆轨迹异常检测对比
Tab. 3 Comparison of vehicle trajectory anomaly detection in abnormal scenarios among various models
| 模型 | TrackRisk | HighD | ||||||
|---|---|---|---|---|---|---|---|---|
| Pre@100(↑) | Pre@300(↑) | Avg Pre(↑) | AUROC(↑) | Pre@100(↑) | Pre@300(↑) | Pre@100(↑) | AUROC(↑) | |
| CVM | 0.70 | 0.625 | 0.668 | 0.708 | 0.61 | 0.612 | 0.648 | 0.695 |
| LTI | 0.85 | 0.837 | 0.695 | 0.722 | 0.75 | 0.695 | 0.628 | 0.677 |
| TOP-EYE | 0.87 | 0.797 | 0.721 | 0.735 | 0.76 | 0.781 | 0.659 | 0.688 |
| Seq2Seq | 0.86 | 0.868 | 0.738 | 0.741 | 0.77 | 0.815 | 0.688 | 0.719 |
| STGAE | 0.82 | 0.752 | 0.655 | 0.672 | 0.72 | 0.703 | 0.636 | 0.608 |
| ImDiffusion | 0.84 | 0.767 | 0.738 | 0.812 | 0.82 | 0.814 | 0.754 | 0.792 |
| DiffTAD | 0.94 | 0.925 | 0.849 | 0.898 | 0.84 | 0.862 | 0.773 | 0.844 |
| DSTGRU | 0.95 | 0.935 | 0.856 | 0.905 | 0.87 | 0.883 | 0.797 | 0.885 |
| 模型 | Slow(慢速) | Stalled(停滞) | Tailgating(跟车) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Pre@100 | Avg Pre | AUROC | Pre@100 | Avg Pre | AUROC | Pre@100 | Avg Pre | AUROC | |
| CVM | 0.02 | 0.025 | 0.418 | 0.00 | 0.028 | 0.015 | 0.05 | 0.165 | 0.832 |
| LTI | 0.00 | 0.020 | 0.430 | 0.00 | 0.027 | 0.014 | 0.03 | 0.155 | 0.820 |
| TOP-EYE | 0.02 | 0.029 | 0.564 | 0.00 | 0.359 | 0.455 | 0.02 | 0.140 | 0.541 |
| Seq2Seq | 0.03 | 0.041 | 0.655 | 0.04 | 0.051 | 0.662 | 0.16 | 0.085 | 0.698 |
| STGAE | 0.00 | 0.045 | 0.560 | 0.00 | 0.022 | 0.440 | 0.02 | 0.050 | 0.480 |
| ImDiffusion | 0.19 | 0.116 | 0.812 | 0.08 | 0.178 | 0.622 | 0.32 | 0.225 | 0.763 |
| DiffTAD | 0.23 | 0.157 | 0.864 | 0.11 | 0.207 | 0.705 | 0.59 | 0.383 | 0.854 |
| DSTGRU | 0.20 | 0.185 | 0.902 | 0.09 | 0.249 | 0.831 | 0.65 | 0.393 | 0.861 |
表4 各模型在不同异常场景下的车辆轨迹异常检测对比
Tab. 4 Comparison of vehicle trajectory anomaly detection in different abnormal scenarios among various models
| 模型 | Slow(慢速) | Stalled(停滞) | Tailgating(跟车) | ||||||
|---|---|---|---|---|---|---|---|---|---|
| Pre@100 | Avg Pre | AUROC | Pre@100 | Avg Pre | AUROC | Pre@100 | Avg Pre | AUROC | |
| CVM | 0.02 | 0.025 | 0.418 | 0.00 | 0.028 | 0.015 | 0.05 | 0.165 | 0.832 |
| LTI | 0.00 | 0.020 | 0.430 | 0.00 | 0.027 | 0.014 | 0.03 | 0.155 | 0.820 |
| TOP-EYE | 0.02 | 0.029 | 0.564 | 0.00 | 0.359 | 0.455 | 0.02 | 0.140 | 0.541 |
| Seq2Seq | 0.03 | 0.041 | 0.655 | 0.04 | 0.051 | 0.662 | 0.16 | 0.085 | 0.698 |
| STGAE | 0.00 | 0.045 | 0.560 | 0.00 | 0.022 | 0.440 | 0.02 | 0.050 | 0.480 |
| ImDiffusion | 0.19 | 0.116 | 0.812 | 0.08 | 0.178 | 0.622 | 0.32 | 0.225 | 0.763 |
| DiffTAD | 0.23 | 0.157 | 0.864 | 0.11 | 0.207 | 0.705 | 0.59 | 0.383 | 0.854 |
| DSTGRU | 0.20 | 0.185 | 0.902 | 0.09 | 0.249 | 0.831 | 0.65 | 0.393 | 0.861 |
| GAT | MSTIDG | BiGRU | RES | Pre@100 | Avg Pre | AUROC |
|---|---|---|---|---|---|---|
| 0.55 | 0.185 | 0.760 | ||||
| 0.68 | 0.240 | 0.783 | ||||
| 0.75 | 0.275 | 0.870 | ||||
| 0.90 | 0.348 | 0.913 |
表5 DSTGRU的消融实验结果
Tab. 5 Ablation experiment results of DSTGRU
| GAT | MSTIDG | BiGRU | RES | Pre@100 | Avg Pre | AUROC |
|---|---|---|---|---|---|---|
| 0.55 | 0.185 | 0.760 | ||||
| 0.68 | 0.240 | 0.783 | ||||
| 0.75 | 0.275 | 0.870 | ||||
| 0.90 | 0.348 | 0.913 |
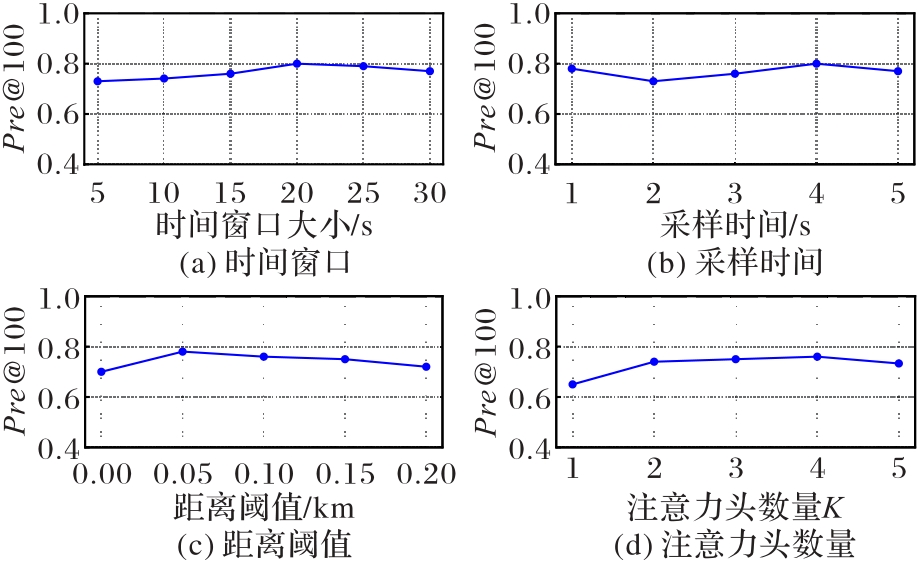
图7 不同超参数对Pre@100的影响
Fig. 7 Impact of different hyperparameters on Pre@100
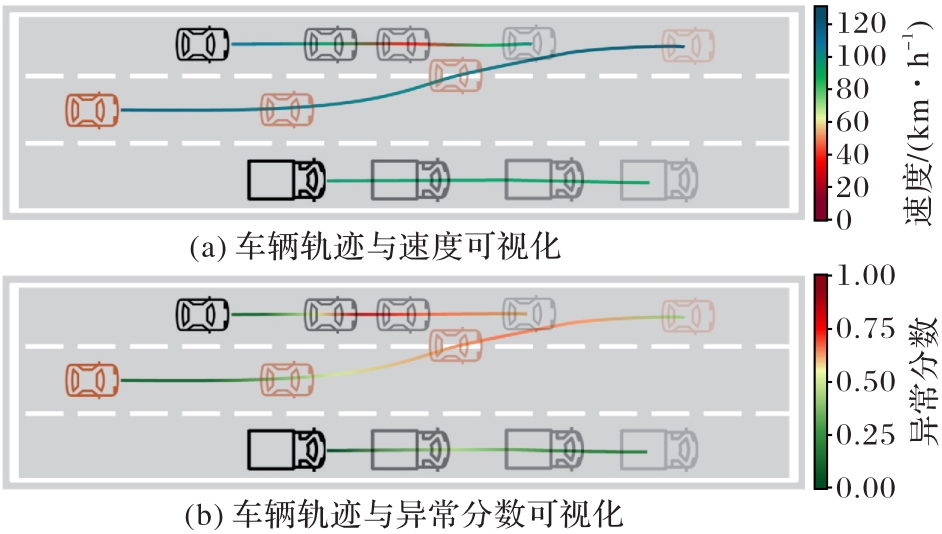
图8 异常场景示例1的可视化
Fig. 8 Visualization of abnormal scenario example 1
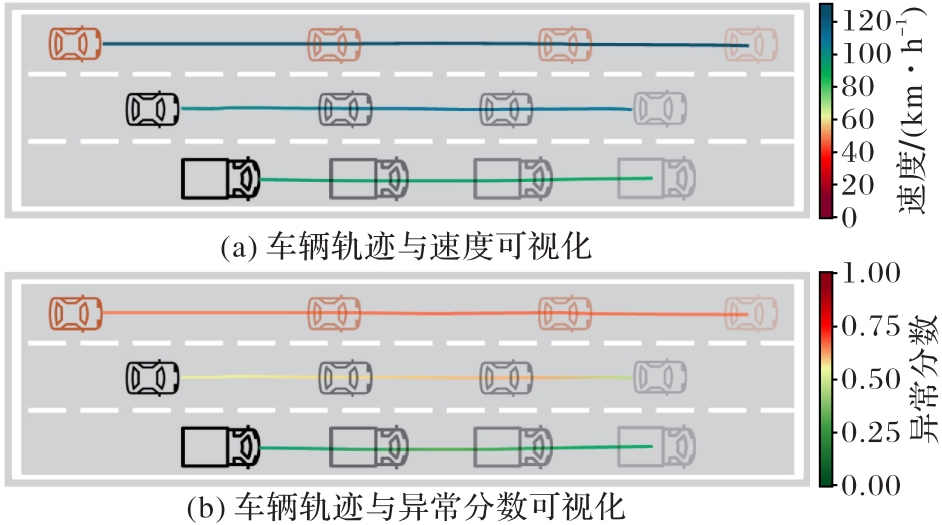
图9 异常场景示例2的可视化
Fig. 9 Visualization of abnormal scenario example 2
| [1] | 李超能,冯冠文,姚航,等. 轨迹异常检测研究综述[J]. 软件学报, 2024, 35(2):927-974. |
| LI C N, FENG G Q, YAO H, et al. Survey on trajectory anomaly detection[J]. Journal of Software, 2024, 35(2): 927-974. | |
| [2] | XIONG X, HE Y, GAO X, et al. A multi-level risk framework for driving safety assessment based on vehicle trajectory[J]. Promet-Traffic and Transportation, 2022, 34(6): 959-973. |
| [3] | JIAO R, BAI J, LIU X, et al. Learning representation for anomaly detection of vehicle trajectories[C]// Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2023: 9699-9706. |
| [4] | LI X, YING X, CHUAH M C. GRIP++: enhanced graph-based interaction-aware trajectory prediction for autonomous driving[EB/OL]. [2025-01-23].. |
| [5] | WIEDERER J, BOUAZIZI A, TROINA M, et al. Anomaly detection in multi-agent trajectories for automated driving[C]// Proceedings of the 5th Conference on Robot Learning. New York: JMLR.org, 2022: 1223-1233. |
| [6] | ZHOU D, HANG P, SUN J. Reasoning graph-based reinforcement learning to cooperate mixed connected and autonomous traffic at unsignalized intersections[J]. Transportation Research Part C: Emerging Technologies, 2024, 167: No.104807. |
| [7] | LEE N, CHOI W, VERNAZA P, et al. DESIRE: distant future prediction in dynamic scenes with interacting agents[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2165-2174. |
| [8] | WANG X, MA Y, WANG Y, et al. Traffic flow prediction via spatial temporal graph neural network[C]// Proceedings of the Web Conference 2020. New York: ACM, 2020: 1082-1092. |
| [9] | ZHANG X, HUANG C, XU Y, et al. Traffic flow forecasting with spatial-temporal graph diffusion network[C]// Proceedings of the 35th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2021: 15008-15015. |
| [10] | ZENG X, JIANG Y, DING W, et al. A hierarchical spatio-temporal graph convolutional neural network for anomaly detection in videos[J]. IEEE Transactions on Circuits and Systems for Video Technology, 2023, 33(1): 200-212. |
| [11] | GERS F A, SCHMIDHUBER J, CUMMINS F. Learning to forget: continual prediction with LSTM[J]. Neural Computation, 2000, 12(10): 2451-2471. |
| [12] | CHUNG J, GULCEHRE C, CHO K, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[EB/OL]. [2025-01-24].. |
| [13] | WANG Z, CHEN Z, NI J, et al. Multi-scale one-class recurrent neural networks for discrete event sequence anomaly detection[C]// Proceedings of the 27th ACM SIGKDD Conference on Knowledge Discovery and Data Mining. New York: ACM, 2021: 3726-3734. |
| [14] | 陈宁. 基于毫米波雷达点云的路口车辆轨迹跟踪与异常行为识别[D]. 广州:华南理工大学, 2023. |
| CHEN N. Vehicle trajectory tracking and abnormal behavior recognition at intersections based on millimeter wave radar point cloud[D]. Guangzhou: South China University of Technology, 2023. | |
| [15] | KUMARAN SANTHOSH K, DOGRA D P, ROY P P, et al. Vehicular trajectory classification and traffic anomaly detection in videos using a hybrid CNN-VAE architecture[J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(8): 11891-11902. |
| [16] | SMOLYAK D, GRAY K, BADIRLI S, et al. Coupled IGMM-GANs with applications to anomaly detection in human mobility data[J]. ACM Transactions on Spatial Algorithms and Systems, 2020, 6(4): No.24. |
| [17] | SCARSELLI F, GORI M, TSOI A C, et al. The graph neural network model[J]. IEEE Transactions on Neural Networks, 2009, 20(1): 61-80. |
| [18] | HU Y, ZHANG Y, WANG Y, et al. Detecting socially abnormal highway driving behaviors via recurrent graph attention networks[C]// Proceedings of the ACM Web Conference 2023. New York: ACM, 2023: 3086-3097. |
| [19] | KONG X, WANG J, HU Z, et al. Mobile trajectory anomaly detection: Taxonomy, methodology, challenges, and directions[J]. IEEE Internet of Things Journal, 2024, 11(11): 19210-19231. |
| [20] | PEI Y, HUANG T, VAN IPENBURG W, et al. ResGCN: attention-based deep residual modeling for anomaly detection on attributed networks[J]. Machine Learning, 2022, 111(2): 519-541. |
| [21] | 夏英,张安洁. 融合时序和空间特征的车辆异常轨迹检测方法[J]. 重庆邮电大学学报(自然科学版), 2023, 35(2): 202-209. |
| XIA Y, ZHANG A J. Vehicle abnormal trajectory detection method based on fusing temporal and spatial features[J]. Journal of Chongqing University of Posts and Telecommunications (Natural Science Edition), 2023, 35(2): 202-209. | |
| [22] | SCHÖLLER C, ARAVANTINOS V, LAY F, et al. What the constant velocity model can teach us about pedestrian motion prediction[J]. IEEE Robotics and Automation Letters, 2020, 5(2): 1696-1703. |
| [23] | GE Y, XIONG H, ZHOU Z H, et al. TOP-EYE: top-k evolving trajectory outlier detection[C]// Proceedings of the 19th ACM International Conference on Information and Knowledge Management. New York: ACM, 2010: 1733-1736. |
| [24] | SUTSKEVER I, VINYALS O, LE Q V. Sequence to sequence learning with neural networks[C]// Proceedings of the 28th International Conference on Neural Information Processing Systems — Volume 2. Cambridge: MIT Press, 2014: 3104-3112. |
| [25] | CHEN Y, ZHANG C, MA M, et al. ImDiffusion: imputed diffusion models for multivariate time series anomaly detection[J]. Proceedings of the VLDB Endowment, 2022, 17(3): 359-372. |
| [26] | LI C, FENG G, LI Y, et al. DiffTAD: denoising diffusion probabilistic models for vehicle trajectory anomaly detection[J]. Knowledge-Based Systems, 2024, 286: No.111387. |
| [1] | 陈晓雷, 郑芷薇, 黄雪, 曲振彬. 结合球面对齐与自适应几何校正的全景视频超分辨率网络[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 528-535. |
| [2] | 林金娇, 张灿舜, 陈淑娅, 王天鑫, 连剑, 徐庸辉. 基于改进图注意力网络的车险欺诈检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 437-444. |
| [3] | 姜皓骞, 张东, 李冠宇, 陈恒. 基于结构增强的层次化任务导向提示策略的对话推荐系统SetaCRS[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 368-377. |
| [4] | 李名, 王孟齐, 张爱丽, 任花, 窦育强. 基于条件生成对抗网络和混合注意力机制的图像隐写方法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 475-484. |
| [5] | 郭泽一, 李凤莲, 徐利春. 基于双重决策机制的深度符号回归算法[J]. 《计算机应用》唯一官方网站, 2026, 46(2): 406-415. |
| [6] | 边小勇, 袁培洋, 胡其仁. 双编码空频混合的红外小目标检测方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 252-259. |
| [7] | 昝志辉, 王雅静, 李珂, 杨智翔, 杨光宇. 基于SAA-CNN-BiLSTM网络的多特征融合语音情感识别方法[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 69-76. |
| [8] | 樊娜, 罗闯, 张泽晖, 张梦瑶, 穆鼎. 基于改进生成对抗网络的车辆轨迹语义隐私保护机制[J]. 《计算机应用》唯一官方网站, 2026, 46(1): 169-180. |
| [9] | 张宏俊, 潘高军, 叶昊, 陆玉彬, 缪宜恒. 结合深度学习和张量分解的多源异构数据分析方法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2838-2847. |
| [10] | 李进, 刘立群. 基于残差Swin Transformer的SAR与可见光图像融合[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2949-2956. |
| [11] | 殷兵, 凌震华, 林垠, 奚昌凤, 刘颖. 兼容缺失模态推理的情感识别方法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2764-2772. |
| [12] | 景攀峰, 梁宇栋, 李超伟, 郭俊茹, 郭晋育. 基于师生学习的半监督图像去雾算法[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 2975-2983. |
| [13] | 李维刚, 邵佳乐, 田志强. 基于双注意力机制和多尺度融合的点云分类与分割网络[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3003-3010. |
| [14] | 许志雄, 李波, 边小勇, 胡其仁. 对抗样本嵌入注意力U型网络的3D医学图像分割[J]. 《计算机应用》唯一官方网站, 2025, 45(9): 3011-3016. |
| [15] | 廖炎华, 鄢元霞, 潘文林. 基于YOLOv9的交通路口图像的多目标检测算法[J]. 《计算机应用》唯一官方网站, 2025, 45(8): 2555-2565. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||