


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (11): 3623-3628.DOI: 10.11772/j.issn.1001-9081.2023101538
王昱( ), 关智慧, 李远鹏
), 关智慧, 李远鹏
收稿日期:2023-11-10
修回日期:2024-02-05
接受日期:2024-02-06
发布日期:2024-03-25
出版日期:2024-11-10
通讯作者:
王昱
作者简介:关智慧(1998—),女,山东济宁人,硕士研究生,主要研究方向:强化学习、追击决策基金资助:
Yu WANG(), Zhihui GUAN, Yuanpeng LI
Received:2023-11-10
Revised:2024-02-05
Accepted:2024-02-06
Online:2024-03-25
Published:2024-11-10
Contact:
Yu WANG
About author:GUAN Zhihui, born in 1998, M. S. candidate. Her research interests include reinforcement learning, pursuit decision-making.Supported by:摘要:
针对复杂任务环境下无人机(UAV)集群追击决策算法灵活性不足、泛化能力差等问题,提出一种基于轨迹预测的分布式多智能体深度确定性策略梯度(TP-DMADDPG)算法。首先,为增强追击任务的真实性,为目标机设计智能化逃逸策略;其次,考虑到因通信中断等原因导致的目标机信息缺失等情况,采用长短时记忆(LSTM)网络实时预测目标机的位置信息,并基于预测信息构建决策模型的状态空间;最后,依据分布式框架和多智能体深度确定性策略梯度(MADDPG)算法设计TP-DMADDPG算法,增强复杂空战进程中集群追击决策的灵活性和泛化能力。仿真实验结果表明,相较于深度确定性策略梯度(DDPG)、双延迟深度确定性策略梯度(TD3)和MADDPG算法,TP?DMADDPG算法将协同决策的成功率提升了至少15个百分点,能够解决不完备信息下追击智能化逃逸目标机的问题。
中图分类号:
王昱, 关智慧, 李远鹏. 基于轨迹预测和分布式MADDPG的无人机集群追击决策[J]. 计算机应用, 2024, 44(11): 3623-3628.
Yu WANG, Zhihui GUAN, Yuanpeng LI. Distributed UAV cluster pursuit decision-making based on trajectory prediction and MADDPG[J]. Journal of Computer Applications, 2024, 44(11): 3623-3628.
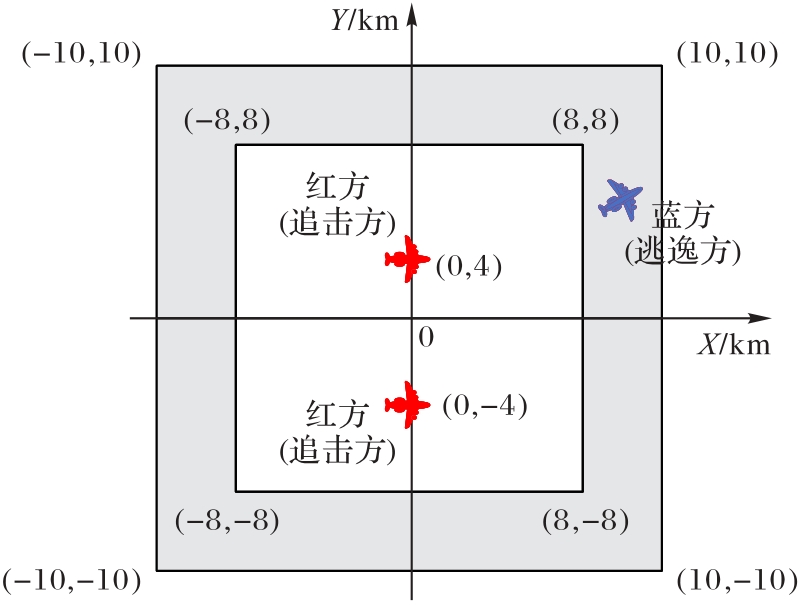
图1 2对1无人机集群追击场景设置
Fig. 1 Two vs. one UAV cluster pursuit scenario setting
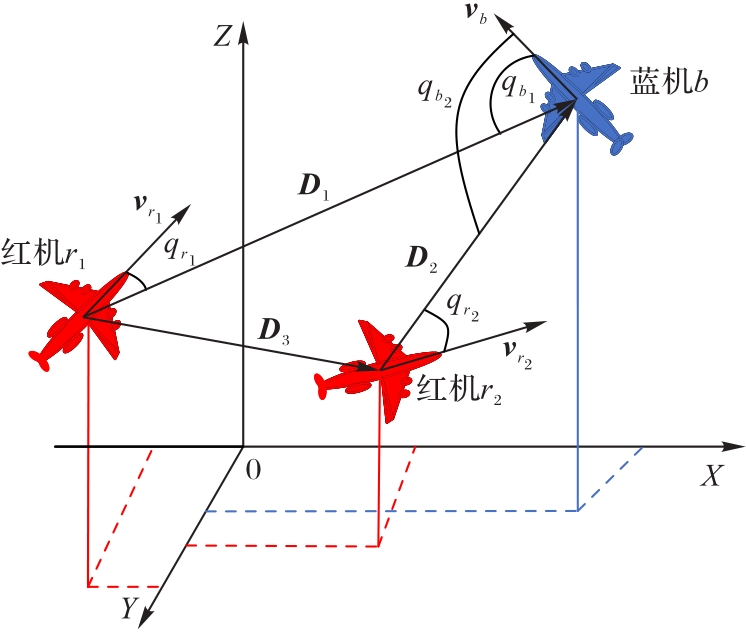
图2 无人机近距空战模型
Fig. 2 UAV close-range air combat model
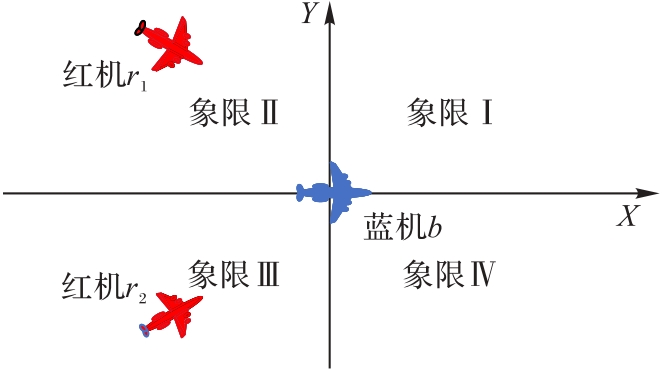
图3 作战空域划分示意图
Fig. 3 Schematic diagram of combat airspace division
| r1位置 | r2位置 | |||
|---|---|---|---|---|
| 象限Ⅰ | 象限Ⅱ | 象限Ⅲ | 象限Ⅳ | |
| 象限Ⅰ | 转向象限Ⅰ | 转向象限Ⅳ | 转向象限Ⅳ | 转向象限Ⅲ |
| 象限Ⅱ | 转向象限Ⅳ | 不变 | 不变 | 转向象限Ⅰ |
| 象限Ⅲ | 转向象限Ⅳ | 不变 | 不变 | 转向象限Ⅰ |
| 象限Ⅳ | 转向象限Ⅲ | 转向象限Ⅰ | 转向象限Ⅰ | 转向象限Ⅰ |
表1 蓝机逃逸策略
Tab. 1 Escape strategy of blue UAV
| r1位置 | r2位置 | |||
|---|---|---|---|---|
| 象限Ⅰ | 象限Ⅱ | 象限Ⅲ | 象限Ⅳ | |
| 象限Ⅰ | 转向象限Ⅰ | 转向象限Ⅳ | 转向象限Ⅳ | 转向象限Ⅲ |
| 象限Ⅱ | 转向象限Ⅳ | 不变 | 不变 | 转向象限Ⅰ |
| 象限Ⅲ | 转向象限Ⅳ | 不变 | 不变 | 转向象限Ⅰ |
| 象限Ⅳ | 转向象限Ⅲ | 转向象限Ⅰ | 转向象限Ⅰ | 转向象限Ⅰ |

图4 MADDPG算法结构
Fig. 4 Structure of MADDPG algorithm

图5 TP-MADDPG算法结构
Fig. 5 Structure of TP-MADDPG algorithm
| 敌机初始位置 | 模型选择 | 敌机初始位置 | 模型选择 |
|---|---|---|---|
| 象限Ⅰ | TP-MADDPG Ⅰ | 象限Ⅲ | TP-MADDPG Ⅲ |
| 象限Ⅱ | TP-MADDPG Ⅱ | 象限Ⅳ | TP-MADDPG Ⅳ |
表2 模型选择机制
Tab. 2 Model selection mechanism
| 敌机初始位置 | 模型选择 | 敌机初始位置 | 模型选择 |
|---|---|---|---|
| 象限Ⅰ | TP-MADDPG Ⅰ | 象限Ⅲ | TP-MADDPG Ⅲ |
| 象限Ⅱ | TP-MADDPG Ⅱ | 象限Ⅳ | TP-MADDPG Ⅳ |

图6 TP-DMADDPG算法结构
Fig. 6 Structure of TP-DMADDPG algorithm
| 参数 | 符号 | 取值 |
|---|---|---|
| Critic网络奖励衰减因子 | 0.99 | |
| Actor、Critic网络软更新参数 | 0.99 | |
| 训练次数 | M | 100 |
| 红方无人机数 | N | 2 |
| 最大对战时间 | T | 200 |
| Actor网络学习率 | 0.001 | |
| Critic网络学习率 | 0.001 | |
| 每次训练从经验池抽取的样本数 | B | 100 |
表3 算法参数详情
Tab. 3 Algorithm parameter details
| 参数 | 符号 | 取值 |
|---|---|---|
| Critic网络奖励衰减因子 | 0.99 | |
| Actor、Critic网络软更新参数 | 0.99 | |
| 训练次数 | M | 100 |
| 红方无人机数 | N | 2 |
| 最大对战时间 | T | 200 |
| Actor网络学习率 | 0.001 | |
| Critic网络学习率 | 0.001 | |
| 每次训练从经验池抽取的样本数 | B | 100 |
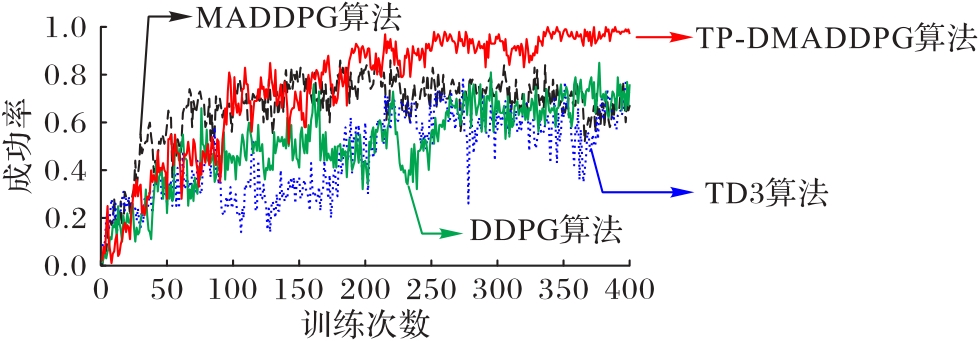
图7 4种算法的训练曲线
Fig. 7 Training curves of four algorithms

图8 完备信息下4种算法的追击成功率比较
Fig. 8 Comparison of pursuit success rates of four algorithms with complete information
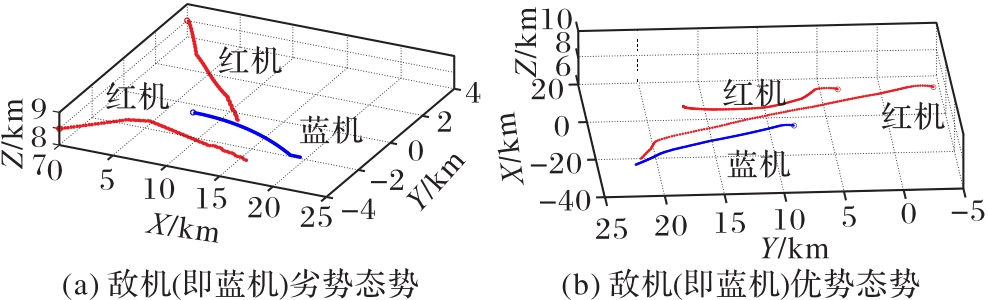
图9 完备信息下TP-DMADDPG算法的追击场景
Fig. 9 Pursuit scenarios of TP-DMADDPG algorithm with complete information
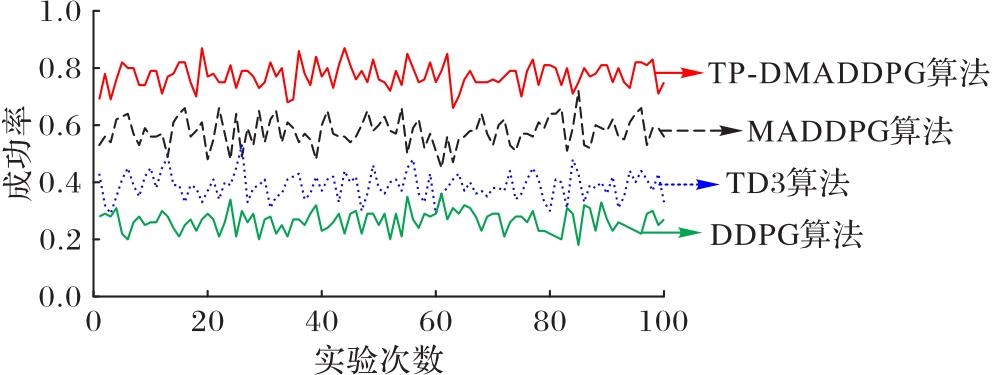
图10 不完备信息下4种算法的追击成功率比较
Fig. 10 Comparison of pursuit success rates of four algorithms with incomplete information
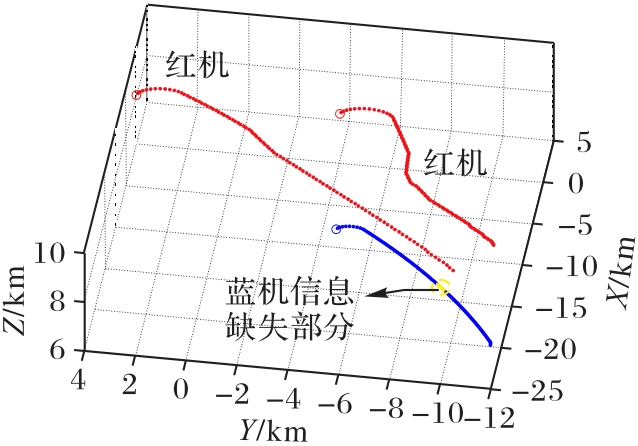
图11 不完备信息下TP-DMADDPG算法的追击场景
Fig. 11 Pursuit scenario of TP-DMADDPG algorithm with incomplete information
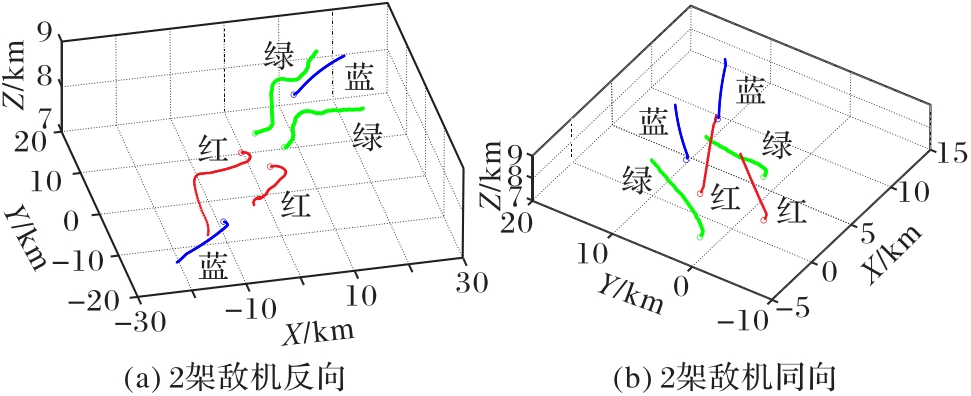
图12 4对2无人机集群追击场景仿真
Fig. 12 Four vs. two UAV cluster pursuit scenarios simulation
| 1 | 刘雷,刘大卫,王晓光,等.无人机集群与反无人机集群发展现状及展望[J].航空学报,2022,43(S1):No.726908. |
| LIU L, LIU D W, WANG X G, et al. Development status and outlook of UAV clusters and anti-UAV clusters[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(S1): No.726908. | |
| 2 | 周新民,吴佳晖,贾圣德,等.无人机空战决策技术研究进展[J].国防科技,2021,42(3):33-41. |
| ZHOU X M, WU J H, JIA S D, et al. Progress in research on combat decision-making technology in UAVs[J]. National Defense Technology, 2021, 42(3): 33-41. | |
| 3 | 王炫,王维嘉,宋科璞,等.基于进化式专家系统树的无人机空战决策技术[J].兵工自动化,2019,38(1):42-47. |
| WANG X, WANG W J, SONG K P, et al. UAV air combat decision based on evolutionary expert system tree[J]. Ordnance Industry Automation, 2019, 38(1): 42-47. | |
| 4 | 杨建峰,肖和业,李亮,等.基于模糊聚类和专家评分机制的无人机多层次模块划分方法[J].系统工程与电子技术,2022,44(8): 2530-2539. |
| YANG J F, XIAO H Y, LI L, et al. Multi-level module partition method of UAV based on fuzzy clustering and expert scoring mechanism[J]. Systems Engineering and Electronics, 2022, 44(8): 2530-2539. | |
| 5 | 张涛,于雷,周中良,等.基于变权重伪并行遗传算法的空战机动决策[J].飞行力学,2012,30(5):470-474. |
| ZHANG T, YU L, ZHOU Z L, et al. Decision-making for air combat maneuvering based on variable weight pseudo-parallel genetic algorithm[J]. Flight Dynamics, 2012, 30(5): 470-474. | |
| 6 | HU T, HU J, ZHAO C, et al. Autonomous decision making of UAV in short-range air combat based on DQN aided by expert knowledge[C]// Proceedings of 2022 International Conference on Autonomous Unmanned Systems, LNEE 1010. Singapore: Springer, 2023: 1661-1670. |
| 7 | YANG Q, ZHENG J, SHEN G, et al. Maneuver decision of UAV in short-range air combat based on deep reinforcement learning[J]. IEEE Access, 2020, 8: 363-378. |
| 8 | 王克亮,侯中喜,高显忠.基于深度确定性策略梯度算法的无人机追击方法[C]// 第三十九届中国控制会议论文集.沈阳:中国自动化学会,2020:7982-7987. |
| WANG K L, HOU Z X, GAO X Z. Deep deterministic policy gradient based UAV pursuit strategy[C]// Proceedings of the 39th China Control Conference. Shenyang: Chinese Association of Automation, 2020: 7982-7987. | |
| 9 | 张耀中,许佳林,姚康佳,等.基于DDPG算法的无人机集群追击任务[J].航空学报,2020,41(10):No.32400. |
| ZHANG Y Z, XU J L, YAO K J, et al. Pursuit missions for UAV swarms based on DDPG algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2020, 41(10): No.32400. | |
| 10 | 李永丰,吕永玺,史静平,等.深度确定性策略梯度和预测相结合的无人机空战决策研究[J].西北工业大学学报,2023,41(1):56-64. |
| LI Y F, LYU Y X, SHI J P, et al. UAV's air combat decision-making based on deep deterministic policy gradient and prediction[J]. Journal of Northwestern Polytechnic University, 2023, 41(1): 56-64. | |
| 11 | 李波,越凯强,甘志刚,等.基于MADDPG的多无人机协同任务决策[J].宇航学报,2021,42(6):757-765. |
| LI B, YUE K Q, GAN Z G, et al. Multi-UAV cooperative autonomous navigation based on multi-agent deep deterministic policy gradient[J]. Journal of Astronautics, 2021, 42(6): 757-765. | |
| 12 | 符小卫,王辉,徐哲.基于DE-MADDPG的多无人机协同追捕策略[J].航空学报,2022,43(5):No.325311. |
| FU X W, WANG H, XU Z. Cooperative pursuit strategy for multi-UAVs based on DE‑MADDPG algorithm[J]. Acta Aeronautica et Astronautica Sinica, 2022, 43(5): No.325311. | |
| 13 | 孙彧,徐越,潘宣宏,等.基于后验经验回放的MADDPG算法[J].指挥信息系统与技术,2021,12(6):78-84. |
| SUN Y, XU Y, PAN X H, et al. Muti-Agent Deep Deterministic Policy Gradient (MADDPG) algorithm based on Hindsight Experience Replay (HER)[J]. Command Information System and Technology, 2021, 12(6): 78-84. | |
| 14 | 刘峰,魏瑞轩,丁超,等.面向多机协同的Att-MADDPG围捕控制方法设计[J].空军工程大学学报(自然科学版),2021,22(3):9-14. |
| LIU F, WEI R X, DING C, et al. Design of Att-MADDPG hunting control method for multi-UAV cooperation[J]. Journal of Air Force Engineering University (Natural Science Edition), 2021, 22(3): 9-14. | |
| 15 | ZHANG Y, LI Y, LI K, et al. Intelligent prediction method for updraft of UAV that is based on LSTM network[J]. IEEE Transactions on Cognitive and Developmental Systems, 2023, 15(2): 464-475. |
| 16 | YAO B, ZHONG Q, CUI H, et al. LSTM-based vehicle trajectory prediction using UAV aerial data[C]// Proceedings of the 2023 KES-STS International Symposium, SIST 356. Singapore: Springer, 2023: 13-21. |
| 17 | SHAHID S, ZHEN Z, JAVAID U, et al. Offense-defense distributed decision making for swarm vs. swarm confrontation while attacking the aircraft carriers[J]. Drones, 2022, 6(10): No.271. |
| 18 | LI D, YANG P, LIU Z, et al. Fault diagnosis for distributed UAVs formation based on unknown input observer[C]// Proceedings of the 2019 Chinese Control Conference. Piscataway: IEEE, 2019: 4996- 5001. |
| [1] | 肖海林, 黄天义, 代秋香, 张跃军, 张中山. 基于轨迹预测的安全强化学习自动变道决策方法[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2958-2963. |
| [2] | 何浩东, 符浩, 王强, 周帅, 刘伟. 基于深度强化学习的多机器人路径跟随与编队[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2626-2633. |
| [3] | 周毅, 高华, 田永谌. 基于裁剪优化和策略指导的近端策略优化算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2334-2341. |
| [4] | 马天, 席润韬, 吕佳豪, 曾奕杰, 杨嘉怡, 张杰慧. 基于深度强化学习的移动机器人三维路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2055-2064. |
| [5] | 田润泽, 周宇龙, 朱洪, 薛岗. 基于局部信息的服务迁移路径选择算法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2168-2174. |
| [6] | 刘晓芳, 张军. 概率驱动的动态多目标多智能体协同调度进化优化[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1372-1377. |
| [7] | 赵晓焱, 韩威, 张俊娜, 袁培燕. 基于异步深度强化学习的车联网协作卸载策略[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1501-1510. |
| [8] | 唐睿, 庞川林, 张睿智, 刘川, 岳士博. D2D通信增强的蜂窝网络中基于DDPG的资源分配[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1562-1569. |
| [9] | 陈发堂, 黄淼, 金宇峰. 面向用户需求的低轨卫星资源分配算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1242-1247. |
| [10] | 唐朝君, 夏梅妍, 张华, 谢挺. 动态事件触发下多智能体系统固定时间一致性[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 960-965. |
| [11] | 秦鑫彤, 宋政育, 侯天为, 王飞越, 孙昕, 黎伟. 基于自适应p持续的移动自组网信道接入和资源分配算法[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 863-868. |
| [12] | 宋紫阳, 李军怀, 王怀军, 苏鑫, 于蕾. 基于路径模仿和SAC强化学习的机械臂路径规划算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 439-444. |
| [13] | 李源潮, 陶重犇, 王琛. 基于最大熵深度强化学习的双足机器人步态控制方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 445-451. |
| [14] | 邓辅秦, 官桧锋, 谭朝恩, 付兰慧, 王宏民, 林天麟, 张建民. 基于请求与应答通信机制和局部注意力机制的多机器人强化学习路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 432-438. |
| [15] | 邓辅秦, 谭朝恩, 黎俊炜, 钟家铭, 付兰慧, 张建民, 王宏民, 李楠楠, 姜炳春, 林天麟. 面向大型仓储环境的基于冲突搜索算法[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3854-3860. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||