


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (2): 445-451.DOI: 10.11772/j.issn.1001-9081.2023020153
所属专题: 人工智能
李源潮1, 陶重犇1,2( ), 王琛1
), 王琛1
收稿日期:2023-02-21
修回日期:2023-04-20
接受日期:2023-05-05
发布日期:2023-08-14
出版日期:2024-02-10
通讯作者:
陶重犇
作者简介:李源潮(1999—),男,江苏连云港人,硕士研究生,主要研究方向:人工智能、双足机器人运动控制基金资助:
Yuanchao LI1, Chongben TAO1,2(), Chen WANG1
Received:2023-02-21
Revised:2023-04-20
Accepted:2023-05-05
Online:2023-08-14
Published:2024-02-10
Contact:
Chongben TAO
About author:LI Yuanchao, born in 1999, M. S. candidate. His research interests include artificial intelligence, biped robot motion control.Supported by:摘要:
针对双足机器人连续直线行走的步态稳定控制问题,提出一种基于最大熵深度强化学习(DRL)的柔性演员-评论家(SAC)步态控制方法。首先,该方法无需事先建立准确的机器人动力学模型,所有参数均来自关节角而无需额外的传感器;其次,采用余弦相似度方法对经验样本分类,优化经验回放机制;最后,根据知识和经验设计奖励函数,使双足机器人在直线行走训练过程中不断进行姿态调整,确保直线行走的鲁棒性。在Roboschool仿真环境中与其他先进深度强化学习算法,如近端策略优化(PPO)方法和信赖域策略优化(TRPO)方法的实验对比结果表明,所提方法不仅实现了双足机器人快速稳定的直线行走,而且鲁棒性更好。
中图分类号:
李源潮, 陶重犇, 王琛. 基于最大熵深度强化学习的双足机器人步态控制方法[J]. 计算机应用, 2024, 44(2): 445-451.
Yuanchao LI, Chongben TAO, Chen WANG. Gait control method based on maximum entropy deep reinforcement learning for biped robot[J]. Journal of Computer Applications, 2024, 44(2): 445-451.

图1 本文步态控制方法的总体框架
Fig.1 Overall framework of the proposed gait control method
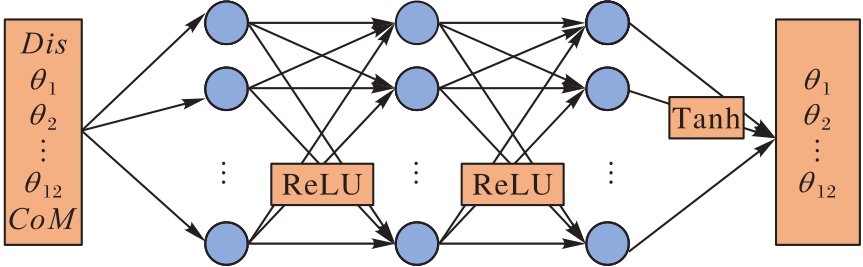
图2 策略网络结构
Fig. 2 Structure of policy network
| 参数 | 描述 |
|---|---|
| Dis | 行走距离 |
| HipR/L pitch | 髋关节绕y轴旋转的角度 |
| HipR/L roll | 髋关节绕x轴旋转的角度 |
| HipR/L yaw | 髋关节绕z轴旋转的角度 |
| KneeR/L pitch | 膝关节绕y轴旋转的角度 |
| AnkleR/L pitch | 踝关节绕y轴旋转的角度 |
| AnkleR/L roll | 踝关节绕x轴旋转的角度 |
| CoMoffx | 质心在x轴的偏差 |
| CoMoffy | 质心在y轴的偏差 |
表1 状态空间
Tab. 1 State space
| 参数 | 描述 |
|---|---|
| Dis | 行走距离 |
| HipR/L pitch | 髋关节绕y轴旋转的角度 |
| HipR/L roll | 髋关节绕x轴旋转的角度 |
| HipR/L yaw | 髋关节绕z轴旋转的角度 |
| KneeR/L pitch | 膝关节绕y轴旋转的角度 |
| AnkleR/L pitch | 踝关节绕y轴旋转的角度 |
| AnkleR/L roll | 踝关节绕x轴旋转的角度 |
| CoMoffx | 质心在x轴的偏差 |
| CoMoffy | 质心在y轴的偏差 |
| 参数 | 描述 |
|---|---|
| HipR/L pitch | 髋关节绕y轴旋转的角度 |
| HipR/L roll | 髋关节绕x轴旋转的角度 |
| HipR/L yaw | 髋关节绕z轴旋转的角度 |
| KneeR/L pitch | 膝关节绕y轴旋转的角度 |
| AnkleR/L roll | 踝关节绕x轴旋转的角度 |
| AnkleR/L pitch | 踝关节绕y轴旋转的角度 |
表2 动作空间
Tab. 2 Action space
| 参数 | 描述 |
|---|---|
| HipR/L pitch | 髋关节绕y轴旋转的角度 |
| HipR/L roll | 髋关节绕x轴旋转的角度 |
| HipR/L yaw | 髋关节绕z轴旋转的角度 |
| KneeR/L pitch | 膝关节绕y轴旋转的角度 |
| AnkleR/L roll | 踝关节绕x轴旋转的角度 |
| AnkleR/L pitch | 踝关节绕y轴旋转的角度 |
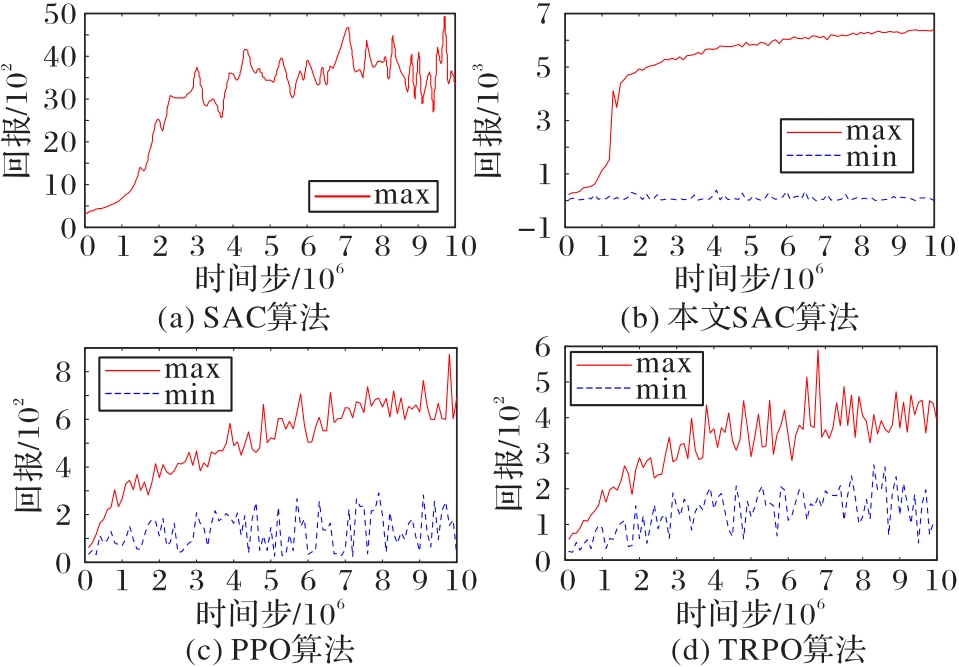
图3 四种算法的奖励值比较
Fig. 3 Comparison of reward values among four algorithms
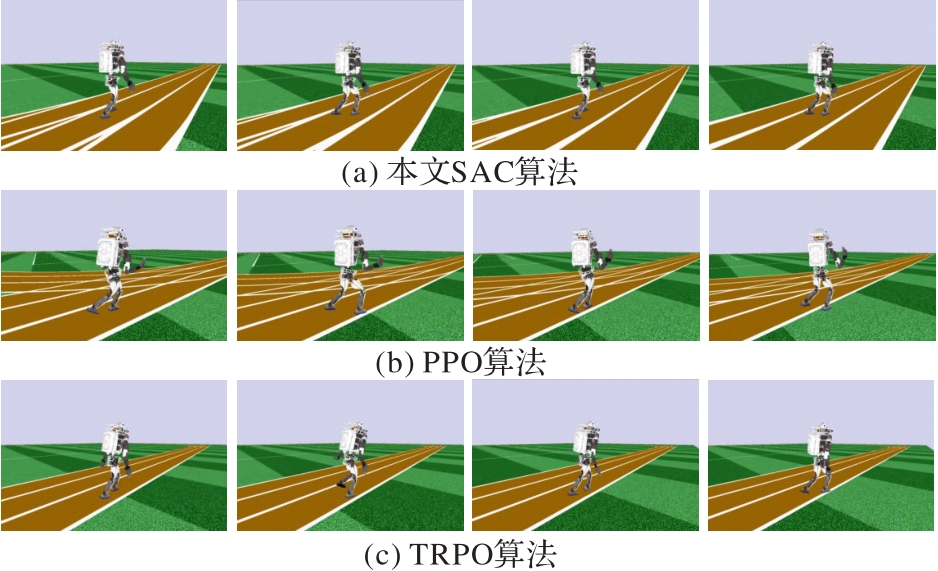
图4 双足机器人在Roboschool中行走的细节
Fig.4 Detail of biped robot walking in Roboschool
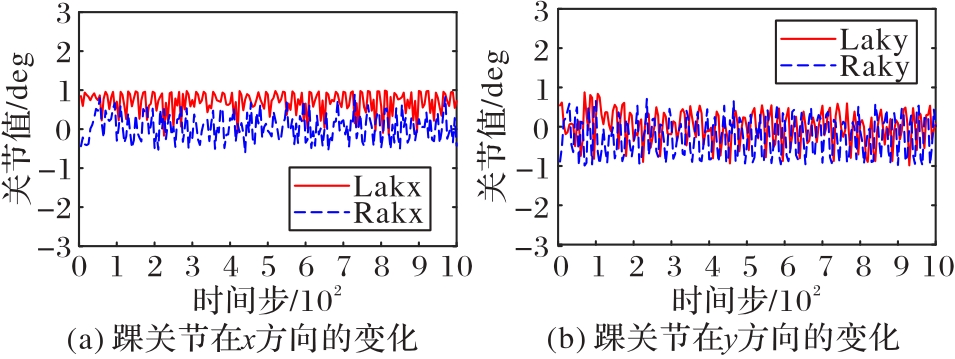
图5 踝关节角度的变化
Fig. 5 Changes in ankle joint angle
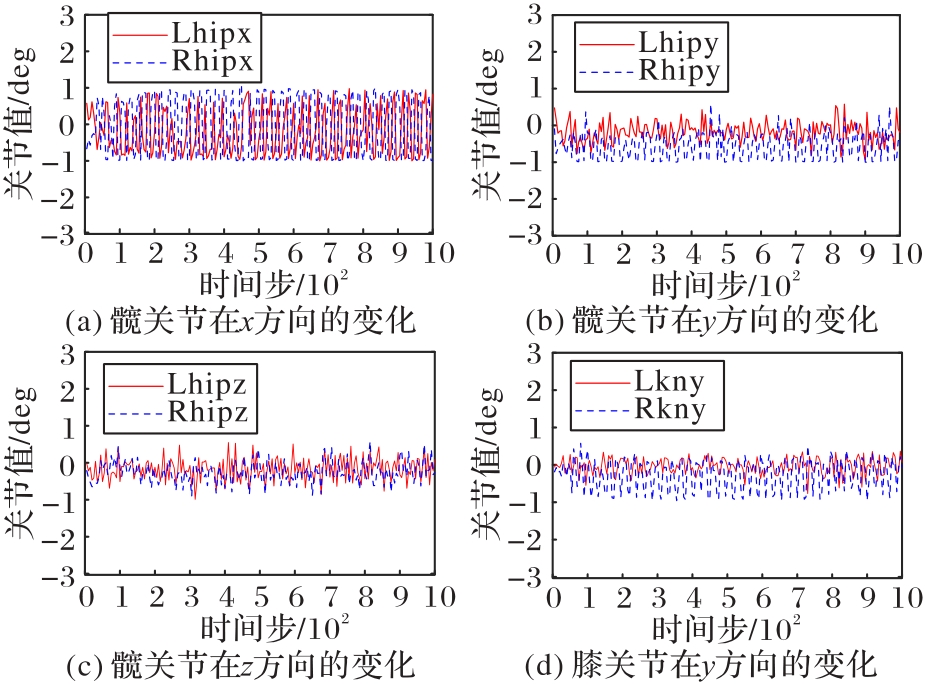
图6 髋关节和膝关节的角度变化
Fig. 6 Changes in angles of hip and knee joints

图7 向前施加外力时的鲁棒性控制
Fig. 7 Robust control when external forces being applied forward

图8 向双足机器人右侧施加外力时的鲁棒性控制
Fig. 8 Robust control when external forces being applied to right side of biped robot
| 1 | LI Z, CHENG X, PENG X B, et al. Reinforcement learning for robust parameterized locomotion control of bipedal robots[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2021: 2811-2817. 10.1109/icra48506.2021.9560769 |
| 2 | KHAN A T, LI S, CAO X. Human guided cooperative robotic agents in smart home using beetle antennae search[J]. Science China Information Sciences, 2022, 65: 122204. 10.1007/s11432-020-3073-5 |
| 3 | XIN S, VIJAYAKUMAR S. Online dynamic motion planning and control for wheeled biped robots[C]// Proceedings of the 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2020: 3892-3899. 10.1109/iros45743.2020.9340967 |
| 4 | KHAN A T, LI S, ZHOU X. Trajectory optimization of 5-link biped robot using beetle antennae search[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2021, 68(10): 3276-3280. 10.1109/tcsii.2021.3062639 |
| 5 | JEONG H, LEE I, OH J, et al. A robust walking controller based on online optimization of ankle, hip, and stepping strategies[J]. IEEE Transactions on Robotics, 2019, 35(6): 1367-1386. 10.1109/tro.2019.2926487 |
| 6 | 廖发康, 周亚丽, 张奇志. 变长度柔性双足机器人行走控制及稳定性分析[J]. 计算机应用, 2023, 43(1): 312-320. |
| LIAO F K, ZHOU Y L, ZHANG Q Z. Walking control and stability analysis of flexible biped robot with variable length legs[J]. Journal of Computer Applications, 2023, 43(1): 312-320. | |
| 7 | 张瑞, 张奇志, 周亚丽. 变长度弹性伸缩腿双足机器人半被动起步行走仿人控制[J]. 计算机应用, 2022, 42(1): 252-257. |
| ZHANG R, ZHANG Q Z, ZHOU Y L. Starting and walking human-like control of semi-passive bipedal robot with variable length telescopic legs[J]. Journal of Computer Applications, 2022, 42(1): 252-257. | |
| 8 | YU J, LIU Y, LI R, et al. Stable walking of seven-link biped robot based on CPG-ZMP hybrid control method[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Biomimetics. Piscataway: IEEE, 2021: 870-874. 10.1109/robio54168.2021.9739430 |
| 9 | YAMAMOTO T, SUGIHARA T. Foot-guided control of a biped robot through ZMP manipulation[J]. Advanced Robotics, 2020, 34(21/22): 1472-1489. 10.1080/01691864.2020.1827031 |
| 10 | TAN J, ZHANG T, COUMANS E, et al. Sim-to-real: learning agile locomotion for quadruped robots[EB/OL]. (2018-05-16) [2023-02-11]. . 10.15607/rss.2018.xiv.010 |
| 11 | HAARNOJA T, HA S, ZHOU A, et al. Learning to walk via deep reinforcement learning[EB/OL]. (2019-06-19) [2023-02-11]. . 10.15607/rss.2019.xv.011 |
| 12 | ARULKUMARAN K, DEISENROTH M P, BRUNDAGE M, et al. Deep reinforcement learning: a brief survey[J]. IEEE Signal Processing Magazine, 2017, 34(6): 26-38. 10.1109/msp.2017.2743240 |
| 13 | LILLICRAP T P, HUNT J J, PRITZEL A, et al. Continuous control with deep reinforcement learning[EB/OL]. (2019-07-05) [2023-02-11]. . |
| 14 | MNIH V, BADIA A P, MIRZA M, et al. Asynchronous methods for deep reinforcement learning[C]// Proceedings of the 2016 International Conference on Machine Learning. New York: JMLR.org, 2016: 1928-1937. |
| 15 | WU Y, YAO D, XIAO X, et al. Intelligent controller for passivity-based biped robot using deep Q network[J]. Journal of Intelligent & Fuzzy Systems, 2019, 36(1): 731-745. 10.3233/jifs-172180 |
| 16 | WU X, LIU S, ZHANG T, et al. Motion control for biped robot via DDPG-based deep reinforcement learning[C]// Proceedings of the 2018 WRC Symposium on Advanced Robotics and Automation. Piscataway: IEEE, 2018: 40-45. 10.1109/wrc-sara.2018.8584227 |
| 17 | SCHULMAN J, WOLSKI F, DHARIWAL P, et al. Proximal policy optimization algorithms[EB/OL]. (2017-08-28) [2023-02-11]. . |
| 18 | SCHULMAN J, LEVINE S, MORITZ P, et al. Trust region policy optimization[C]// Proceedings of the 32nd International Conference on Machine Learning. New York: JMLR.org, 2015: 1889-1897. |
| 19 | WU Y-H, YU Z-C, LI C-Y, et al. Reinforcement learning in dual-arm trajectory planning for a free-floating space robot[J]. Aerospace Science and Technology, 2020, 98: 105657. 10.1016/j.ast.2019.105657 |
| 20 | 赵玉婷, 韩宝玲, 罗庆生. 基于deep Q-network双足机器人非平整地面行走稳定性控制方法[J]. 计算机应用, 2018, 38(9): 2459-2463. |
| ZHAO Y T, HAN B L, LUO Q S. Walking stability control method based on deep Q-network for biped robot on uneven ground[J]. Journal of Computer Applications, 2018, 38(9): 2459-2463. | |
| 21 | TAO C, XUE J, ZHANG Z, et al. Parallel deep reinforcement learning method for gait control of biped robot[J]. IEEE Transactions on Circuits and Systems II: Express Briefs, 2022, 69(6): 2802-2806. 10.1109/tcsii.2022.3145373 |
| 22 | RODRIGUEZ D, BEHNKE S. DeepWalk: omnidirectional bipedal gait by deep reinforcement learning[C]// Proceedings of the 2021 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2021: 3033-3039. 10.1109/icra48506.2021.9561717 |
| 23 | HAARNOJA T, PONG V, ZHOU A, et al. Composable deep reinforcement learning for robotic manipulation[C]// Proceedings of the 2018 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2018: 6244-6251. 10.1109/icra.2018.8460756 |
| 24 | MNIH V, KAVUKCUOGLU K, SILVER D, et al. Playing Atari with deep reinforcement learning[EB/OL]. (2013-12-19) [2023-02-11]. . 10.1038/nature14236 |
| 25 | HAARNOJA T, ZHOU A, ABBEEL P, et al. Soft actor-critic: off-policy maximum entropy deep reinforcement learning with a stochastic actor[C]// Proceedings of the 2018 International Conference on Machine Learning. New York: JMLR.org, 2018: 1861-1870. 10.1109/icra.2018.8460756 |
| 26 | SCHAUL T, QUAN J, ANTONOGLOU I, et al. Prioritized experience replay[EB/OL]. (2016-02-25) [2023-02-11]. . |
| 27 | FUJITA Y, NAGARAJAN P, KATAOKA T, et al. ChainerRL: a deep reinforcement learning library[J]. The Journal of Machine Learning Research, 2021, 22(1): 3557-3570. |
| 28 | CASTILLO G A, WENG B, HEREID A, et al. Reinforcement learning meets hybrid zero dynamics: a case study for rabbit[C]// Proceedings of the 2019 International Conference on Robotics and Automation. Piscataway: IEEE, 2019: 284-290. 10.1109/icra.2019.8793627 |
| [1] | 周毅, 高华, 田永谌. 基于裁剪优化和策略指导的近端策略优化算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2334-2341. |
| [2] | 马天, 席润韬, 吕佳豪, 曾奕杰, 杨嘉怡, 张杰慧. 基于深度强化学习的移动机器人三维路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2055-2064. |
| [3] | 赵晓焱, 韩威, 张俊娜, 袁培燕. 基于异步深度强化学习的车联网协作卸载策略[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1501-1510. |
| [4] | 唐睿, 庞川林, 张睿智, 刘川, 岳士博. D2D通信增强的蜂窝网络中基于DDPG的资源分配[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1562-1569. |
| [5] | 秦鑫彤, 宋政育, 侯天为, 王飞越, 孙昕, 黎伟. 基于自适应p持续的移动自组网信道接入和资源分配算法[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 863-868. |
| [6] | 邓辅秦, 官桧锋, 谭朝恩, 付兰慧, 王宏民, 林天麟, 张建民. 基于请求与应答通信机制和局部注意力机制的多机器人强化学习路径规划方法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 432-438. |
| [7] | 余家宸, 杨晔. 基于裁剪近端策略优化算法的软机械臂不规则物体抓取[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3629-3638. |
| [8] | 龙杰, 谢良, 徐海蛟. 集成的深度强化学习投资组合模型[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 300-310. |
| [9] | 王昱, 任田君, 范子琳. 基于引导Minimax-DDQN的无人机空战机动决策[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2636-2643. |
| [10] | 王子腾, 于亚新, 夏子芳, 乔佳琪. 融合好奇心和策略蒸馏的稀疏奖励探索机制[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2082-2090. |
| [11] | 李校林, 江雨桑. 无人机辅助移动边缘计算中的任务卸载算法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1893-1899. |
| [12] | 方和平, 刘曙光, 冉泳屹, 钟坤华. 基于深度强化学习的多数据中心一体化调度优化[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1884-1892. |
| [13] | 黄晓辉, 杨凯铭, 凌嘉壕. 基于共享注意力的多智能体强化学习订单派送[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1620-1624. |
| [14] | 曹腾飞, 刘延亮, 王晓英. 基于改进深度强化学习的边缘计算服务卸载算法[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1543-1550. |
| [15] | 丁正凯, 傅启明, 陈建平, 陆悠, 吴宏杰, 方能炜, 邢镔. 结合注意力机制与深度强化学习的超短期光伏功率预测[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1647-1654. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||