


《计算机应用》唯一官方网站 ›› 0, Vol. ›› Issue (): 286-295.DOI: 10.11772/j.issn.1001-9081.2023121749
周子渊1,2, 成苗1,2,3( ), 何莲1,2,3, 张佳成3
), 何莲1,2,3, 张佳成3
收稿日期:2023-12-03
修回日期:2024-03-12
接受日期:2024-03-14
发布日期:2025-01-24
出版日期:2024-12-31
通讯作者:
成苗
作者简介:周子渊(2000—),男,四川成都人,硕士研究生,主要研究方向:人工智能、机器视觉
Ziyuan ZHOU1,2, Miao CHENG1,2,3(), Lian HE1,2,3, Jiacheng ZHANG3
Received:2023-12-03
Revised:2024-03-12
Accepted:2024-03-14
Online:2025-01-24
Published:2024-12-31
Contact:
Miao CHENG
摘要:
实时、准确的玻璃缺陷检测至关重要;然而,尺度多变的缺陷形态以及特征微弱的小目标和长宽比例极端的细长目标让这个任务极具挑战性。针对上述需求,提出一种基于改进YOLOv8(You Only Look Once version 8)的小目标与细长目标检测模型YOLO-WANI(WPAN+AMFI+NWD&Inner-CIoU)。首先,设计WPAN(Weighted Path Aggregation Network)减小小目标和细长目标信息在网络传播过程中发生的损失,从而平衡不同尺度信息的重要性;其次,引入基于注意力的多尺度特征交互模块(AMFI),以捕捉深层特征中聚焦对象的语义信息;再次,使用归一化沃瑟斯坦距离(NWD)和Inner-CIoU损失替换原始的CIoU(Complete Intersection over Union)损失,从而提高对小目标和细长目标的检测效率;最后,制作玻璃缺陷检测数据集验证模型性能。实验结果表明,相较于YOLOv8n,YOLO-WANI在玻璃缺陷检测数据集上的mAP50:95提高了1.9个百分点、mAP50提高了4.6个百分点,分别达到了42.6%、81.7%;在NEU-DET(the NorthEastern University surface defect database for defect DETection task)钢材缺陷检测数据集上mAP50:95提高了1.5个百分点、mAP50提高了1.9个百分点,分别达到了40.3%、76.1%。所提模型和各个量级的实时缺陷检测模型相比都有着最高的精度,同时只有4.1×106的参数量和9.9 GFLOPs的计算量,且FPS(Frames Per Second)达到138、单图推理时间为(7.16±0.17) ms,满足轻量化和高精度的需求。
中图分类号:
周子渊, 成苗, 何莲, 张佳成. 基于改进YOLOv8的小目标与细长目标检测模型[J]. 计算机应用, 0, (): 286-295.
Ziyuan ZHOU, Miao CHENG, Lian HE, Jiacheng ZHANG. Small and elongated object detection model based on improved YOLOv8[J]. Journal of Computer Applications, 0, (): 286-295.
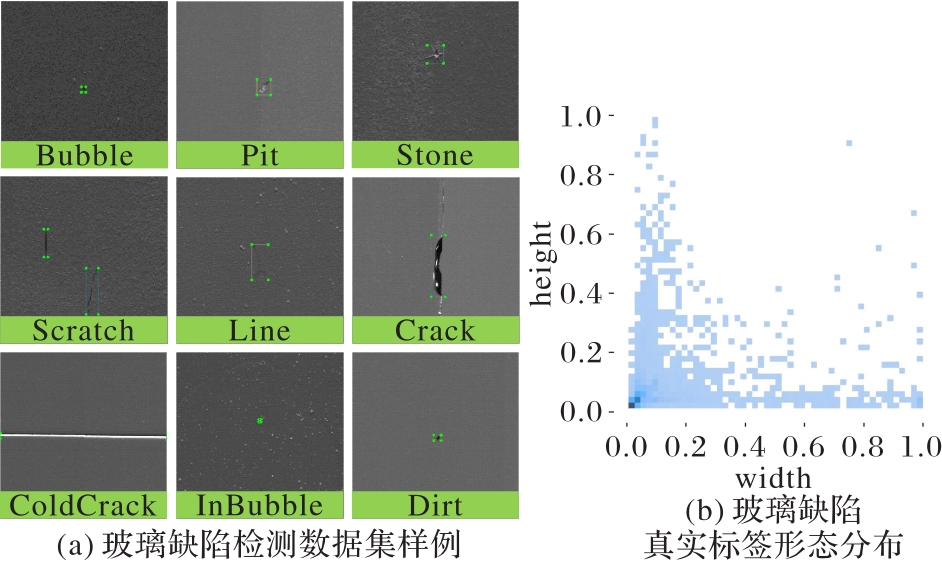
图1 玻璃缺陷检测数据集样例和形态分布
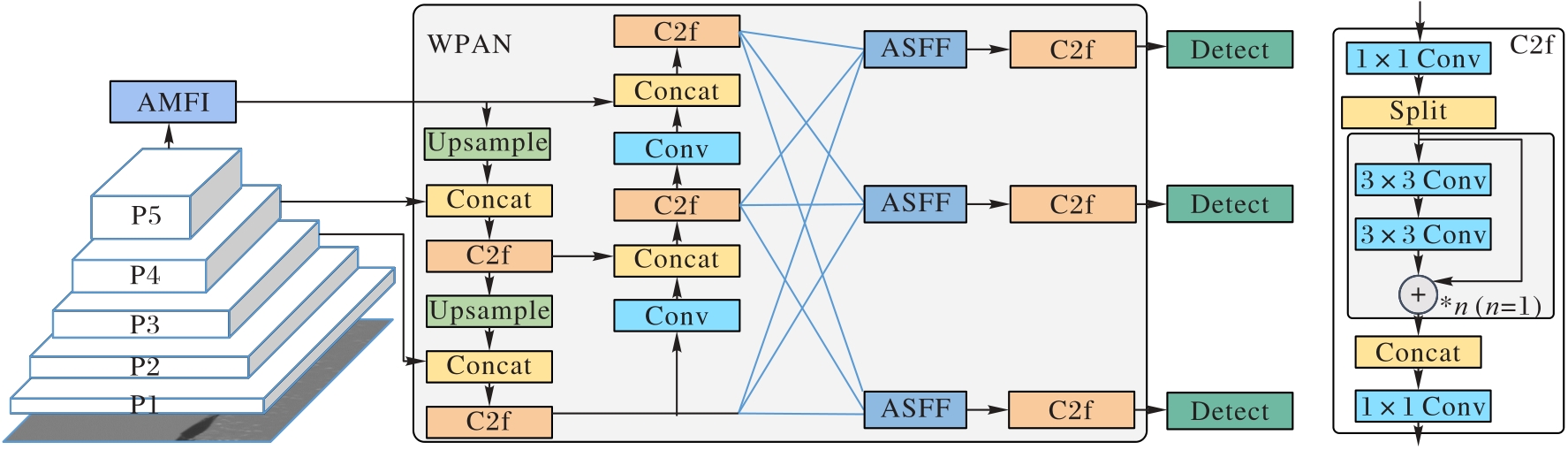
图2 YOLO-WANI多尺度玻璃缺陷检测模型结构
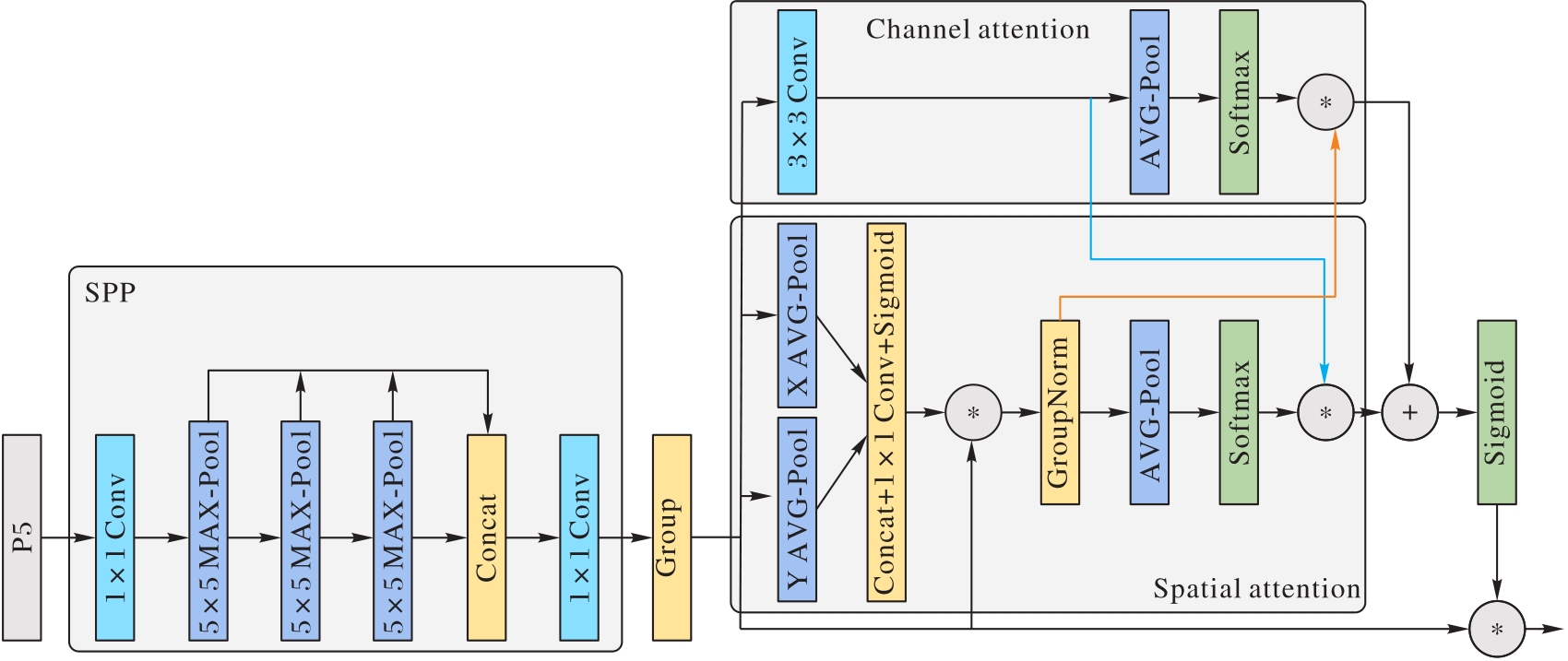
图3 基于注意力机制的多尺度特征交互模块
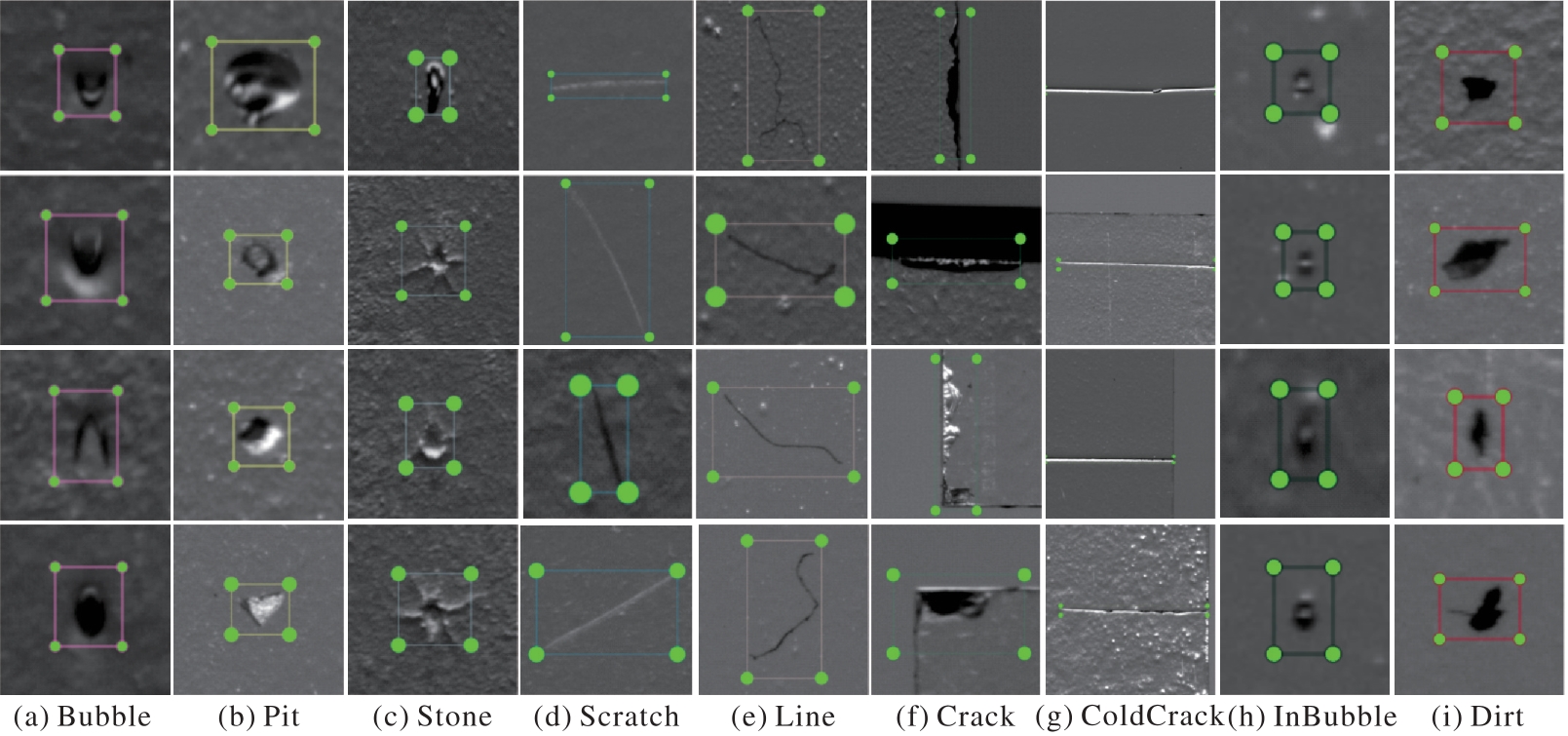
图4 自制玻璃缺陷检测数据集各缺陷样例
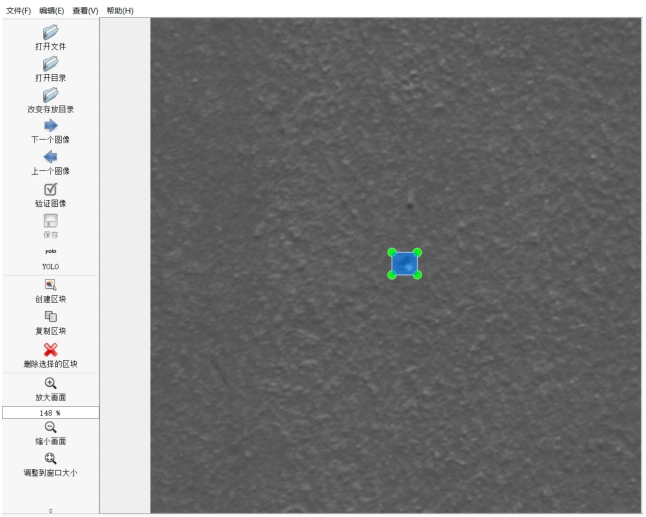
图5 玻璃缺陷在labelimg上的标注过程示例
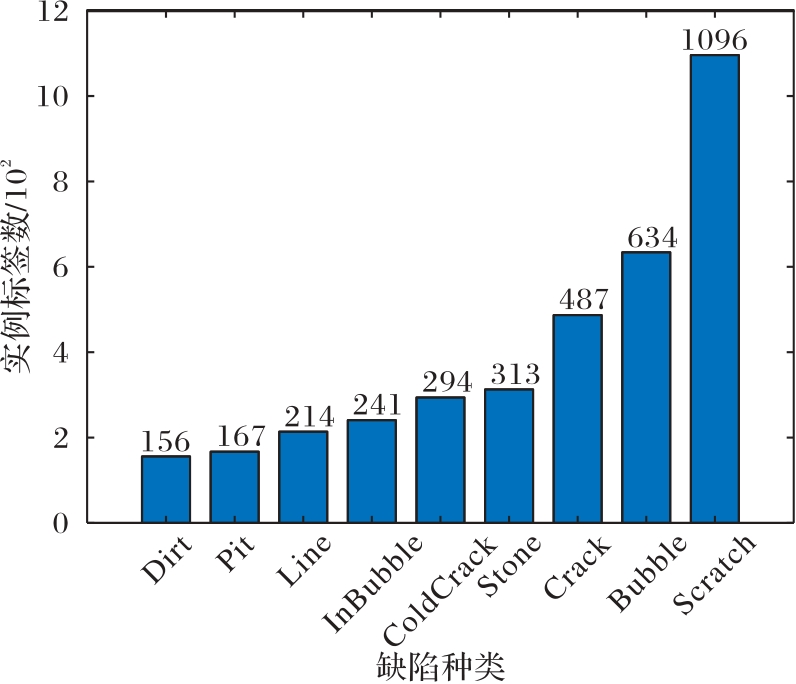
图6 各类型缺陷实例数量分布
| 颈部结构 | mAP50:95/ % | mAP50/ % | 参数量/106 | 计算量/GFLOPs |
|---|---|---|---|---|
| PAN | 40.7 | 77.1 | 3.0 | 8.1 |
| BiFPN | 40.5 | 76.6 | 3.1 | 8.3 |
| AFPN | 40.9 | 78.1 | 3.4 | 8.7 |
| Smallod | 40.9 | 77.5 | 3.1 | 12.2 |
| Slimneck | 40.0 | 75.8 | 2.8 | 7.3 |
| WPAN(本文) | 42.1 | 80.9 | 4.1 | 9.7 |
表1 不同颈部结构在玻璃缺陷检测上的性能对比
| 颈部结构 | mAP50:95/ % | mAP50/ % | 参数量/106 | 计算量/GFLOPs |
|---|---|---|---|---|
| PAN | 40.7 | 77.1 | 3.0 | 8.1 |
| BiFPN | 40.5 | 76.6 | 3.1 | 8.3 |
| AFPN | 40.9 | 78.1 | 3.4 | 8.7 |
| Smallod | 40.9 | 77.5 | 3.1 | 12.2 |
| Slimneck | 40.0 | 75.8 | 2.8 | 7.3 |
| WPAN(本文) | 42.1 | 80.9 | 4.1 | 9.7 |
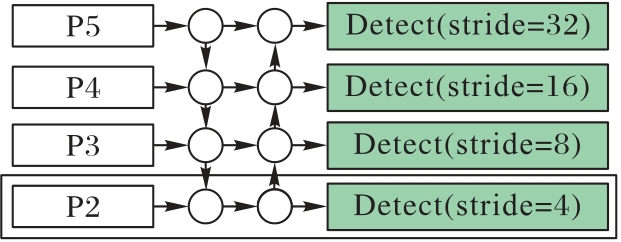
图7 Smallod颈部结构示意图

图8 模型颈部结构特征热力图
| 特征交互模块 | mAP50:95/ % | mAP50/ % | 参数量/106 | 计算量/GFLOPs |
|---|---|---|---|---|
| SPPF | 40.7 | 77.1 | 3.0 | 8.1 |
| SPPFCSP | 40.6 | 75.5 | 4.6 | 9.4 |
| SimCSPSPPF | 40.7 | 78.8 | 3.4 | 8.4 |
| SE | 41.1 | 78.1 | 3.0 | 8.1 |
| CA | 40.3 | 79.3 | 3.0 | 8.1 |
| BAM | 41.2 | 79.2 | 3.0 | 8.1 |
| CBAM | 40.8 | 79.6 | 3.0 | 8.1 |
| Biformer | 41.6 | 78.6 | 3.3 | 62.4 |
| LSKA | 40.6 | 78.1 | 3.0 | 8.3 |
| AMFI(本文) | 41.3 | 80.1 | 3.0 | 8.3 |
表2 不同的特征交互模块在玻璃缺陷检测上的性能对比
| 特征交互模块 | mAP50:95/ % | mAP50/ % | 参数量/106 | 计算量/GFLOPs |
|---|---|---|---|---|
| SPPF | 40.7 | 77.1 | 3.0 | 8.1 |
| SPPFCSP | 40.6 | 75.5 | 4.6 | 9.4 |
| SimCSPSPPF | 40.7 | 78.8 | 3.4 | 8.4 |
| SE | 41.1 | 78.1 | 3.0 | 8.1 |
| CA | 40.3 | 79.3 | 3.0 | 8.1 |
| BAM | 41.2 | 79.2 | 3.0 | 8.1 |
| CBAM | 40.8 | 79.6 | 3.0 | 8.1 |
| Biformer | 41.6 | 78.6 | 3.3 | 62.4 |
| LSKA | 40.6 | 78.1 | 3.0 | 8.3 |
| AMFI(本文) | 41.3 | 80.1 | 3.0 | 8.3 |
边界框回归 损失函数 | mAP50:95/ % | mAP50/ % | 参数量/106 | 计算量/GFLOPs |
|---|---|---|---|---|
| CIoU | 40.7 | 77.1 | 3.0 | 8.1 |
| EIoU | 39.3 | 77.7 | 3.0 | 8.1 |
| SIoU | 40.3 | 77.8 | 3.0 | 8.1 |
| MPDIoU | 40.1 | 76.9 | 3.0 | 8.1 |
| Wise-IoU | 40.9 | 78.1 | 3.0 | 8.1 |
| NWD | 41.0 | 77.0 | 3.0 | 8.1 |
NWD&Inner-CIoU (本文) | 41.1 | 78.6 | 3.0 | 8.1 |
表3 不同的边界框回归损失函数在玻璃缺陷检测上的性能对比
边界框回归 损失函数 | mAP50:95/ % | mAP50/ % | 参数量/106 | 计算量/GFLOPs |
|---|---|---|---|---|
| CIoU | 40.7 | 77.1 | 3.0 | 8.1 |
| EIoU | 39.3 | 77.7 | 3.0 | 8.1 |
| SIoU | 40.3 | 77.8 | 3.0 | 8.1 |
| MPDIoU | 40.1 | 76.9 | 3.0 | 8.1 |
| Wise-IoU | 40.9 | 78.1 | 3.0 | 8.1 |
| NWD | 41.0 | 77.0 | 3.0 | 8.1 |
NWD&Inner-CIoU (本文) | 41.1 | 78.6 | 3.0 | 8.1 |
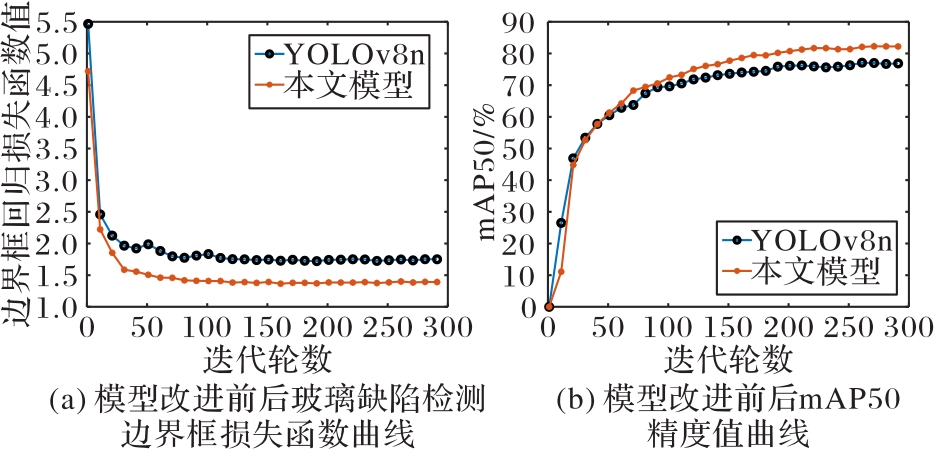
图9 模型改进前后玻璃缺陷检测边界框损失曲线和mAP50精度值曲线对比
| 模型 | mAP50:95/ % | mAP50/ % | 参数量/ 106 | 计算量/GFLOPs |
|---|---|---|---|---|
| Faster-RCNN(VGG16) | 40.6 | 77.3 | 136.9 | 118.5 |
| SSD300 | 40.4 | 62.9 | 30.8 | 24.7 |
| EfficientDet-D2 | 41.0 | 79.6 | 8.0 | 10.4 |
| FCOS | 41.3 | 72.7 | 32.1 | 80.7 |
| YOLOv5n | 38.2 | 75.5 | 2.5 | 7.1 |
| YOLOv5s | 40.6 | 79.3 | 9.1 | 23.8 |
| YOLOv6n | 39.7 | 76.0 | 4.2 | 11.8 |
| YOLOv6s | 40.0 | 78.7 | 16.3 | 44.0 |
| YOLOv8n | 40.7 | 77.1 | 3.0 | 8.1 |
| YOLOv8s | 42.2 | 79.6 | 11.1 | 28.5 |
| YOLOv8m | 42.3 | 79.9 | 25.8 | 78.7 |
| YOLOv8l | 42.5 | 80.1 | 43.6 | 164.9 |
| YOLOv8x | 42.7 | 81.0 | 68.1 | 257.4 |
| RT-DETR-R50 | 38.5 | 66.1 | 42.8 | 135.8 |
| RT-DETR-R101 | 40.5 | 67.1 | 76.6 | 259.2 |
| 本文模型 | 42.6 | 81.7 | 4.1 | 9.9 |
表4 不同实时目标检测模型在玻璃缺陷检测上的性能对比
| 模型 | mAP50:95/ % | mAP50/ % | 参数量/ 106 | 计算量/GFLOPs |
|---|---|---|---|---|
| Faster-RCNN(VGG16) | 40.6 | 77.3 | 136.9 | 118.5 |
| SSD300 | 40.4 | 62.9 | 30.8 | 24.7 |
| EfficientDet-D2 | 41.0 | 79.6 | 8.0 | 10.4 |
| FCOS | 41.3 | 72.7 | 32.1 | 80.7 |
| YOLOv5n | 38.2 | 75.5 | 2.5 | 7.1 |
| YOLOv5s | 40.6 | 79.3 | 9.1 | 23.8 |
| YOLOv6n | 39.7 | 76.0 | 4.2 | 11.8 |
| YOLOv6s | 40.0 | 78.7 | 16.3 | 44.0 |
| YOLOv8n | 40.7 | 77.1 | 3.0 | 8.1 |
| YOLOv8s | 42.2 | 79.6 | 11.1 | 28.5 |
| YOLOv8m | 42.3 | 79.9 | 25.8 | 78.7 |
| YOLOv8l | 42.5 | 80.1 | 43.6 | 164.9 |
| YOLOv8x | 42.7 | 81.0 | 68.1 | 257.4 |
| RT-DETR-R50 | 38.5 | 66.1 | 42.8 | 135.8 |
| RT-DETR-R101 | 40.5 | 67.1 | 76.6 | 259.2 |
| 本文模型 | 42.6 | 81.7 | 4.1 | 9.9 |
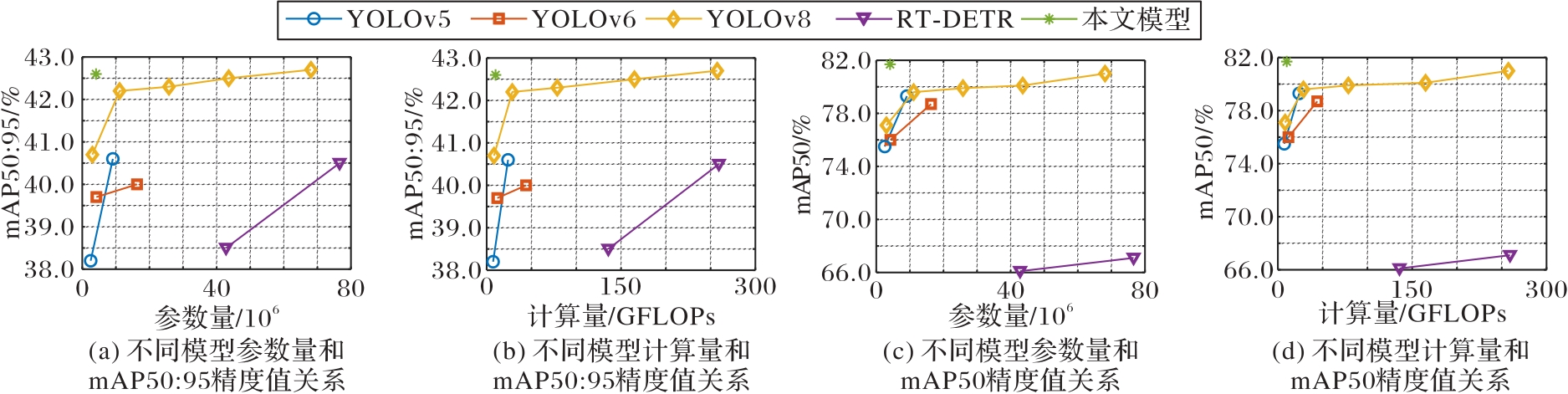
图10 不同实时目标检测模型在玻璃缺陷检测数据集上的性能对比
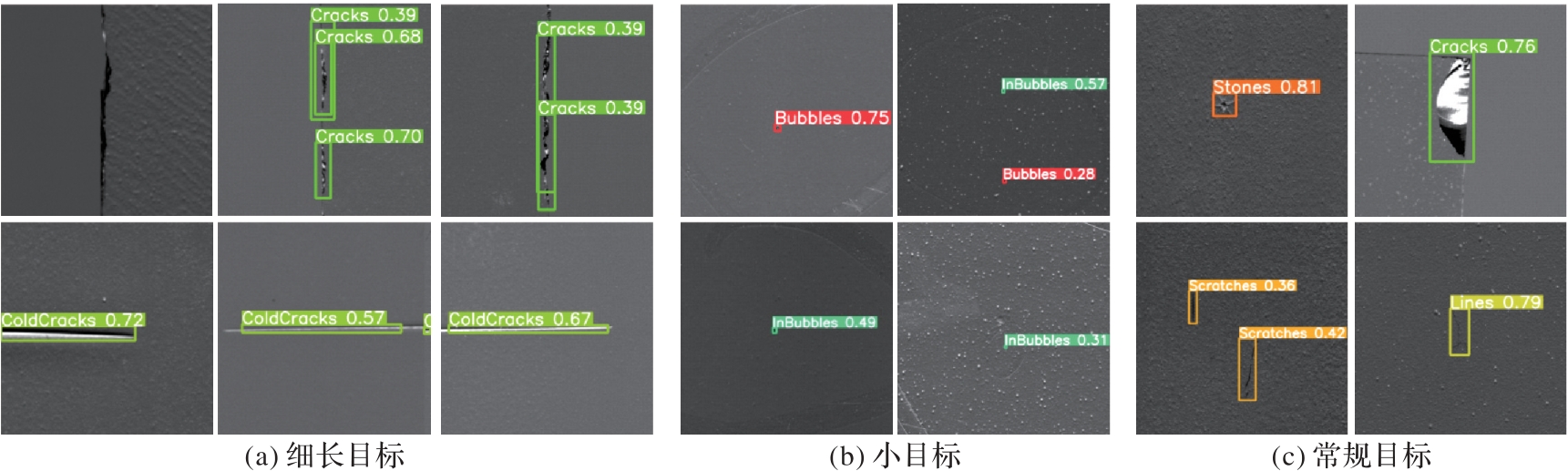
图11 YOLOv8n针对不同玻璃缺陷类别的检测结果置信度
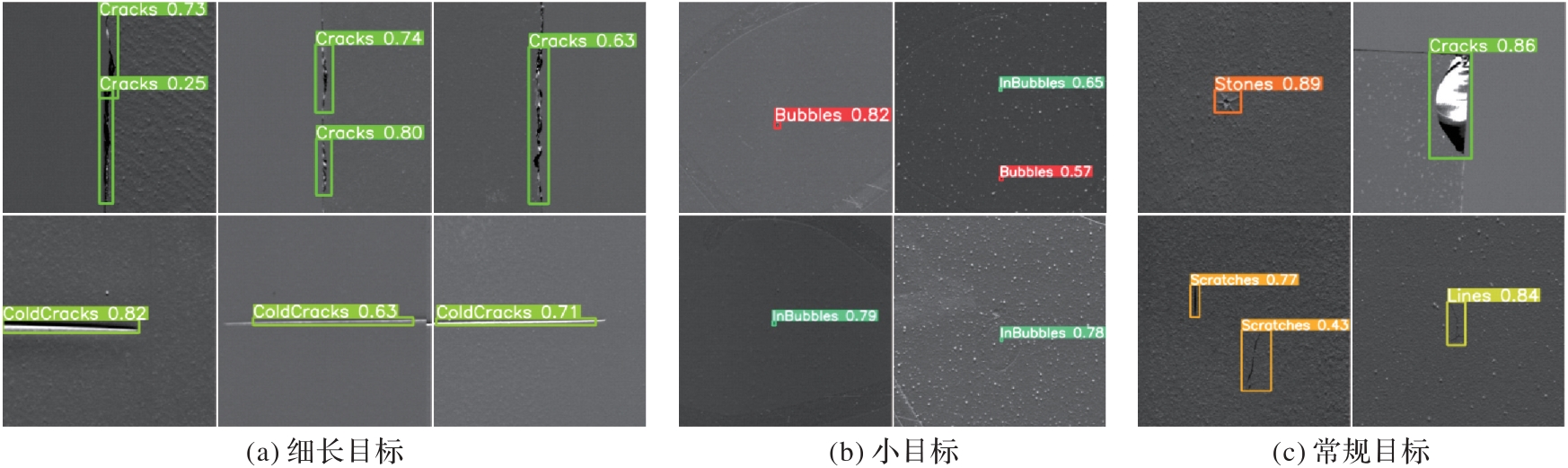
图12 YOLO-WANI针对不同玻璃缺陷类别的检测结果置信度
| 模型 | mAP50:95/ % | mAP50/ % | 参数量/ 106 | 计算量/GFLOPs |
|---|---|---|---|---|
| YOLOv8n | 40.7 | 77.1 | 3.0 | 8.1 |
| +WPAN | 42.1 | 80.9 | 4.1 | 9.7 |
| +WPAN+AMFI | 42.3 | 81.4 | 4.1 | 9.9 |
| +WANI | 42.6 | 81.7 | 4.1 | 9.9 |
表5 在玻璃缺陷检测数据集上的消融实验结果
| 模型 | mAP50:95/ % | mAP50/ % | 参数量/ 106 | 计算量/GFLOPs |
|---|---|---|---|---|
| YOLOv8n | 40.7 | 77.1 | 3.0 | 8.1 |
| +WPAN | 42.1 | 80.9 | 4.1 | 9.7 |
| +WPAN+AMFI | 42.3 | 81.4 | 4.1 | 9.9 |
| +WANI | 42.6 | 81.7 | 4.1 | 9.9 |

图13 本文模型在NEU-DET数据集上的检测结果示例
| 模型 | mAP50:95/ % | mAP50/ % | 参数量 /106 | 计算量/GFLOPs |
|---|---|---|---|---|
| YOLOv8n | 38.8 | 74.2 | 3.0 | 8.1 |
| YOLOv8s | 38.5 | 73.7 | 11.1 | 28.4 |
| 本文模型 | 40.3 | 76.1 | 4.1 | 9.9 |
表6 不同实时目标检测模型在NEU-DET数据集上的性能对比
| 模型 | mAP50:95/ % | mAP50/ % | 参数量 /106 | 计算量/GFLOPs |
|---|---|---|---|---|
| YOLOv8n | 38.8 | 74.2 | 3.0 | 8.1 |
| YOLOv8s | 38.5 | 73.7 | 11.1 | 28.4 |
| 本文模型 | 40.3 | 76.1 | 4.1 | 9.9 |
| 1 | 曹家乐,李亚利,孙汉卿,等. 基于深度学习的视觉目标检测技术综述[J]. 中国图象图形学报, 2022, 27(6): 1697-1722. |
| 2 | DAI J, QI H, XIONG Y, et al. Deformable convolutional networks[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 764-773. |
| 3 | QI Y, HE Y, QI X, et al. Dynamic snake convolution based on topological geometric constraints for tubular structure segmentation[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 6047-6056. |
| 4 | LI J, LIANG X, WEI Y, et al. Perceptual generative adversarial networks for small object detection[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 1951-1959. |
| 5 | BAI Y, ZHANG Y, DING M, et al. SOD-MTGAN: small object detection via multi-task generative adversarial network [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11217. Cham: Springer, 2018: 210-226. |
| 6 | LIN T Y, DOLLÁR P, GIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. |
| 7 | LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8759-8768. |
| 8 | GHIASI G, LIN T Y, LE Q V. NAS-FPN: learning scalable feature pyramid architecture for object detection[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 7029-7038. |
| 9 | TAN M, PANG R, LE Q V. EfficientDet: scalable and efficient object detection[C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 10778-10787. |
| 10 | ZHAO G, GE W, YU Y. GraphFPN: graph feature pyramid network for object detection[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 2743-2752. |
| 11 | YANG G, LEI J, ZHU Z, et al. AFPN: asymptotic feature pyramid network for object detection[C]// Proceedings of the 2023 IEEE International Conference on Systems, Man, and Cybernetics. Piscataway: IEEE, 2023: 2184-2189. |
| 12 | WANG J, XU C, YANG W, et al. A normalized Gaussian Wasserstein distance for tiny object detection[EB/OL]. [2023-06-14].. |
| 13 | ZHANG H, XU C, ZHANG S. Inner-IoU: more effective intersection over union loss with auxiliary bounding box[EB/OL]. [2023-12-14].. |
| 14 | HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. |
| 15 | LIU S, HUANG D, WANG Y. Learning spatial fusion for single-shot object detection[EB/OL]. [2023-11-25].. |
| 16 | ZHAO Y, LV W, XU S, et al. DETRs beat YOLOs on real-time object detection[EB/OL]. [2023-08-06].. |
| 17 | HU J, SHEN L, SUN G. Squeeze-and-excitation networks[C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 7132-7141. |
| 18 | HOU Q, ZHOU D, FENG J. Coordinate attention for efficient mobile network design [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13708-13717. |
| 19 | PARK J, WOO S, LEE J Y, et al. BAM: bottleneck attention module[C]// Proceedings of the 2018 British Machine Vision Conference. Durham: BMVA Press, 2018: No.92. |
| 20 | WOO S, PARK J, LEE J Y, et al. CBAM: convolutional block attention module [C]// Proceedings of the 2018 European Conference on Computer Vision, LNCS 11211. Cham: Springer, 2018: 3-19. |
| 21 | LAU K W, PO L M, REHMAN Y A UR. Large separable kernel attention: rethinking the large kernel attention design in CNN[J]. Expert Systems with Applications, 2024, 236: No.121352. |
| 22 | ZHU X, SU W, LU L, et al. Deformable DETR: deformable transformers for end-to-end object detection [EB/OL]. [2023-03-18].. |
| 23 | ZHU L, WANG X, KE Z, et al. BiFormer: vision Transformer with bi-level routing attention[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 10323-10333. |
| 24 | OUYANG D, HE S, ZHANG G, et al. Efficient multi-scale attention module with cross-spatial learning [C]// Proceedings of the 2023 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway: IEEE, 2023: 1-5. |
| 25 | REDMON J, FARHADI A. YOLO9000: better, faster, stronger [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6517-6525. |
| 26 | BOCHKOVSKIY A, WANG C Y, LIAO H Y M. YOLOv4: optimal speed and accuracy of object detection[EB/OL]. [2023-04-23].. |
| 27 | MSEDDI W S, GHALI R, JMAL M, et al. Fire detection and segmentation using YOLOv5 and U-Net [C]// Proceedings of the 29th European Signal Processing Conference. Piscataway: IEEE, 2021: 741-745. |
| 28 | CHEN Q, WANG Y, YANG T, et al. You only look one-level feature[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13034-13043. |
| 29 | WANG C Y, BOCHKOVSKIY A, LIAO H Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 7464-7475. |
| 30 | HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN[C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2980-2988. |
| 31 | ZHANG H, CHANG H, MA B, et al. Dynamic R-CNN: towards high quality object detection via dynamic training [C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12360. Cham: Springer, 2020: 260-275. |
| 32 | CARION N, MASSA F, SYNNAEVE G, et al. End-to-end object detection with Transformers[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12346. Cham: Springer, 2020: 213-229. |
| 33 | GIRSHICK R. Fast R-CNN[C]// Proceedings of the 2015 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2015: 1440-1448. |
| 34 | YU J, JIANG Y, WANG Z, et al. UnitBox: an advanced object detection network[C]// Proceedings of the 24th ACM International Conference on Multimedia. New York: ACM, 2016: 516-520. |
| 35 | REZATOFIGHI H, TSOI N, GWAK J, et al. Generalized intersection over union: a metric and a loss for bounding box regression[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 658-666. |
| 36 | ZHENG Z, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression [C]// Proceedings of the 34th AAAI Conference on Artificial Intelligence. Palo Alto: AAAI Press, 2020: 12993-13000. |
| 37 | ZHENG Z, WANG P, REN D, et al. Enhancing geometric factors in model learning and inference for object detection and instance segmentation [J]. IEEE Transactions on Cybernetics, 2022, 52(8): 8574-8586. |
| 38 | ZHANG Y F, REN W, ZHANG Z, et al. Focal and efficient IoU loss for accurate bounding box regression[J]. Neurocomputing, 2022, 506: 146-157. |
| 39 | GEVORGYAN Z. SIoU loss: more powerful learning for bounding box regression[EB/OL]. [2023-05-25].. |
| 40 | TONG Z, CHEN Y, XU Z, et al. Wise-IoU: bounding box regression loss with dynamic focusing mechanism[EB/OL]. [2023-04-08].. |
| 41 | MA S, XU Y. MDPIoU: a loss for efficient and accurate bounding box regression[EB/OL]. [2023-09-14].. |
| 42 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 39(6): 1137-1149. |
| 43 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector[C]// Proceedings of the 2016 European Conference on Computer Vision, LNCS 9905. Cham: Springer, 2016: 21-37. |
| 44 | CAI Z, VASCONCELOS N. Cascade R-CNN: delving into high quality object detection [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 6154-6162. |
| 45 | LIN T Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2999-3007. |
| 46 | TIAN Z, SHEN C, CHEN H, et al. FCOS: fully convolutional one-stage object detection[C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 9626-9635. |
| 47 | LI H, LI J, WEI H, et al. Slim-Neck by GSConv: a better design paradigm of detector architectures for autonomous vehicles[EB/OL]. [2023-08-17].. |
| 48 | SELVARAJU R R, COGSWELL M, DAS A, et al. Grad-CAM: visual explanations from deep networks via gradient-based localization [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 618-626. |
| 49 | LI C, LI L, JIANG H, et al. YOLOv6: a single-stage object detection framework for industrial applications [EB/OL]. [2023-08-07].. |
| 50 | HE Y, SONG K, MENG Q, et al. An end-to-end steel surface defect detection approach via fusing multiple hierarchical features [J]. IEEE Transactions on Instrumentation and Measurement, 2020, 69(4): 1493-1504. |
| [1] | 郭慧洁, 窦天凤, 张振琳, 亓开元, 吴栋, 曲志坚, 李钊, 任崇广. 基于时间依赖建模的动态贝叶斯网络交通预测[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1507-1517. |
| [2] | 彭文, 张博凯, 林金炜. 融合图像纹理增强与超分辨率的染色体级联分类框架[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1647-1657. |
| [3] | 王倩飞, 李旸, 李德玉, 王素格. 基于大语言模型的双通道特征融合表示的短文本聚类方法[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1441-1449. |
| [4] | 贺元昊, 赵军. 基于FHC-DETR的列车轴承滚子缺陷检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1624-1633. |
| [5] | 胡静, 陈世堃, 王芳, 张睿, 王勇. 基于线性可变形卷积与双域协同动态注意力的矿石图像分割[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1692-1702. |
| [6] | 荆莹, 李然, 蒋卓, 付子扬, 杜晶颐, 刘琪, 刘吉航. 引入自动提示编码器的SAM睑板腺统一密集分割方法[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1667-1676. |
| [7] | 郑宝源, 贺超波. 图扩散与双视图特征学习增强的图卷积网络[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1370-1377. |
| [8] | 吴闵奇, 杨元华, 李航, 胡雅琴, 汤智豪, 梅腾. 基于图Transformer和RT-DETR的轻量化水下小目标检测[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1586-1595. |
| [9] | 宋芮芮, 王雷春, 何运平, 魏金香, 卢祥凤, 刘小萌. 基于混合自注意力和差异归一化的长时间序列预测[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1499-1506. |
| [10] | 张红瑞, 冯威铭, 杨潞霞, 马永杰. 基于YOLO11改进的水下小目标检测算法CSAF-YOLO[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1578-1585. |
| [11] | 何帅, 邓春华. 基于YOLO-World的少样本学习目标检测算法[J]. 《计算机应用》唯一官方网站, 2026, 46(4): 1275-1282. |
| [12] | 刘欢娴, 王洪涛, 王宪奥, 王洪梅, 徐伟峰. 跨模态语义关联的多模态事实验证[J]. 《计算机应用》唯一官方网站, 2026, 46(4): 1069-1076. |
| [13] | 豆旭梦, 解滨, 张朝晖, 赵振刚, 段菡煜, 郭澳磊. 基于结构‒网络协同特征与网格注意力增强KAN的药物靶标相互作用预测[J]. 《计算机应用》唯一官方网站, 2026, 46(4): 1344-1353. |
| [14] | 张永兵, 闫丽蓉, 唐晓芬. 渐进式双阶段模态交互的单域泛化目标检测[J]. 《计算机应用》唯一官方网站, 2026, 46(4): 1264-1274. |
| [15] | 严心怡, 朱灵龙, 张永宏. 面向复杂交通场景的多尺度实时人车检测方法CDC-DETR[J]. 《计算机应用》唯一官方网站, 2026, 46(4): 1283-1291. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||