


《计算机应用》唯一官方网站 ›› 2025, Vol. 45 ›› Issue (4): 1241-1248.DOI: 10.11772/j.issn.1001-9081.2024040464
林柄权1, 刘磊1( ), 李华峰2, 刘晨1
), 李华峰2, 刘晨1
收稿日期:2024-04-16
修回日期:2024-08-04
接受日期:2024-08-08
发布日期:2025-04-08
出版日期:2025-04-10
通讯作者:
刘磊
作者简介:林柄权(2000—),男,湖南岳阳人,硕士研究生,主要研究方向:强化学习;基金资助:
Bingquan LIN1, Lei LIU1(), Huafeng LI2, Chen LIU1
Received:2024-04-16
Revised:2024-08-04
Accepted:2024-08-08
Online:2025-04-08
Published:2025-04-10
Contact:
Lei LIU
About author:LIN Bingquan, born in 2000, M. S. candidate. His research interests include reinforcement learning.Supported by:摘要:
针对拒绝服务(DoS)攻击下无人机(UAV)通信阻塞、运动轨迹不可预测的问题,在人工势场法(APF)和深度确定性策略梯度(DDPG)融合框架下研究DoS攻击期间的多UAV安全集群控制策略。首先,使用Hping3对所有UAV进行DoS攻击检测,以实时确定UAV集群的网络环境;其次,当未检测到攻击时,采用传统的APF进行集群飞行;再次,在检测到攻击后,将被攻击的UAV标记为动态障碍物,而其他UAV切换为DDPG算法生成的控制策略;最后,所提框架实现APF和DDPG的协同配合及优势互补,并通过在Gazebo中进行仿真实验验证DDPG算法的有效性。仿真实验结果表明,Hping3能实时检测出被攻击的UAV,且其他正常UAV切换为DDPG算法后能稳定避开障碍物,从而保障集群安全;在DoS攻击期间,采用切换避障策略的成功率为72.50%,远高于传统APF的31.25%,且切换策略逐渐收敛,表现出较好的稳定性;训练后的DDPG避障策略具有一定泛化性,当环境中出现1~2个未知障碍物时仍能稳定完成任务。
中图分类号:
林柄权, 刘磊, 李华峰, 刘晨. DoS攻击下基于APF和DDPG算法的无人机安全集群控制[J]. 计算机应用, 2025, 45(4): 1241-1248.
Bingquan LIN, Lei LIU, Huafeng LI, Chen LIU. Secure cluster control of UAVs under DoS attacks based on APF and DDPG algorithm[J]. Journal of Computer Applications, 2025, 45(4): 1241-1248.
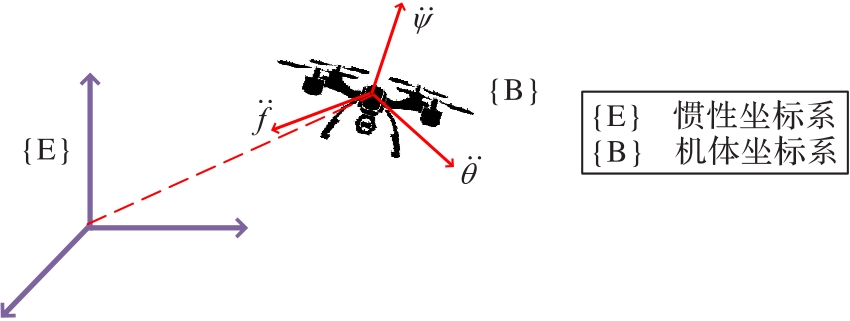
图1 四旋翼无人机及机体坐标系
Fig. 1 Quadcopter and airframe coordinate system
| 参数 | 描述 | 设置值 | 单位 |
|---|---|---|---|
| 质量 | 0.958 | ||
| 0.025 17 | |||
| 0.025 17 | |||
| 0.041 35 | |||
| 臂长 | 0.2 | ||
| 重力加速度 | 9.81 |
表1 四旋翼无人机参数
Tab. 1 Quadcopter parameters
| 参数 | 描述 | 设置值 | 单位 |
|---|---|---|---|
| 质量 | 0.958 | ||
| 0.025 17 | |||
| 0.025 17 | |||
| 0.041 35 | |||
| 臂长 | 0.2 | ||
| 重力加速度 | 9.81 |
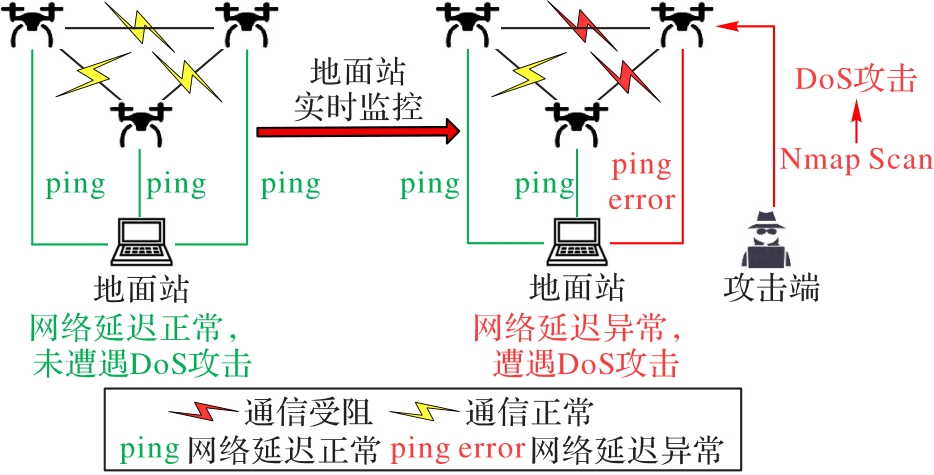
图2 DoS攻击检测过程
Fig. 2 Process of detecting DoS attack
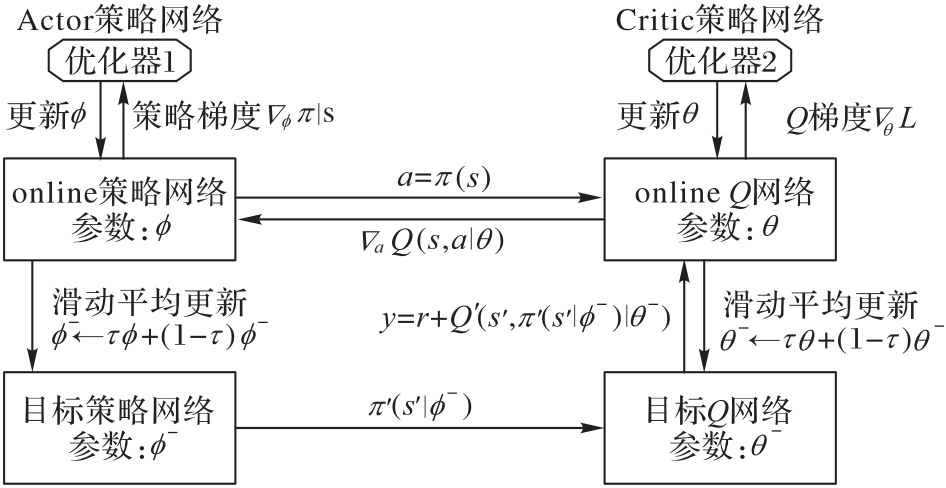
图3 神经网络关系图
Fig. 3 Neural network relationship diagram
| 参数 | 设置值 |
|---|---|
| Nmap扫描格式 | nmap-Pn |
| DoS攻击强度 | hping3-c 100-d 100-S--flood |
| DoS攻击检测 | ping |
表2 DoS攻击的参数设置
Tab. 2 Parameters setting for DoS attacks
| 参数 | 设置值 |
|---|---|
| Nmap扫描格式 | nmap-Pn |
| DoS攻击强度 | hping3-c 100-d 100-S--flood |
| DoS攻击检测 | ping |
| 参数 | 设置值 |
|---|---|
| 折扣因子 | 0.9 |
| Actor网络学习率 | 0.000 5 |
| Critic网络学习率 | 0.001 |
| 采样池中的样本数 | 64 |
| 经验回放池中的样本数 | 15 000 |
| 软更新率 | 0.005 |
| 探索噪声 | 0.5 |
| 回合中最大运行步长 | 150 |
表3 DDPG算法训练参数
Tab. 3 DDPG algorithm training parameters
| 参数 | 设置值 |
|---|---|
| 折扣因子 | 0.9 |
| Actor网络学习率 | 0.000 5 |
| Critic网络学习率 | 0.001 |
| 采样池中的样本数 | 64 |
| 经验回放池中的样本数 | 15 000 |
| 软更新率 | 0.005 |
| 探索噪声 | 0.5 |
| 回合中最大运行步长 | 150 |
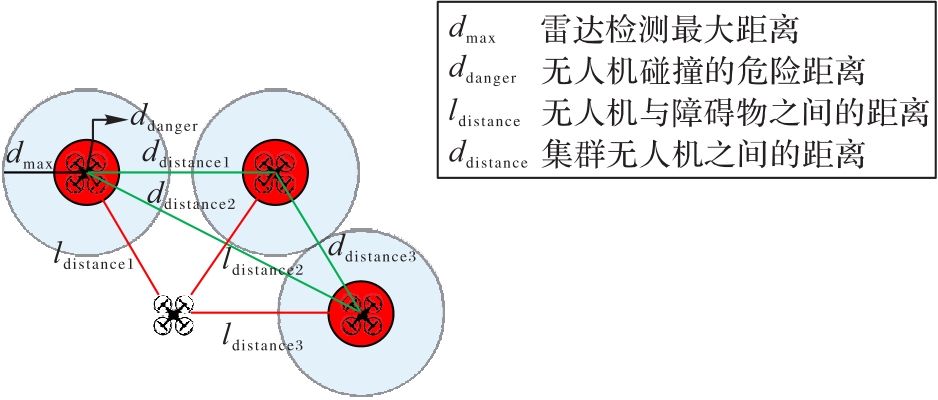
图4 无人机避障二维示意图
Fig. 4 Two dimensional schematic diagram of UAV obstacle avoidance
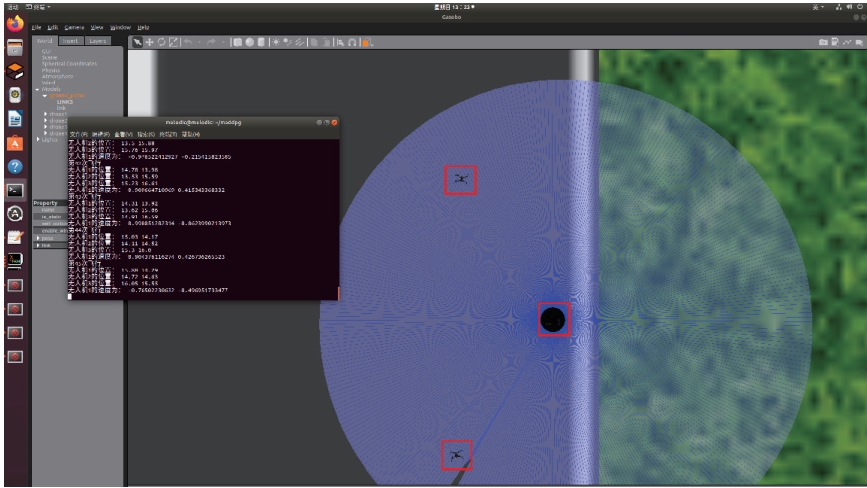
图5 Gazebo仿真环境
Fig. 5 Gazebo simulation environment

图6 正常网络延迟
Fig. 6 Normal round-trip time

图7 DoS攻击下的网络延迟
Fig. 7 Round-trip time during DoS attack
| 时段 | 网络延迟/ms | 丢包率/% |
|---|---|---|
| 正常通信 | 0.323 | 0.000 0 |
| DoS攻击期间 | 224.033 | 90.724 6 |
表4 正常通信与DoS攻击期间2项指标的变化
Tab. 4 Changes in two indicators during normal communication and DoS attack periods
| 时段 | 网络延迟/ms | 丢包率/% |
|---|---|---|
| 正常通信 | 0.323 | 0.000 0 |
| DoS攻击期间 | 224.033 | 90.724 6 |
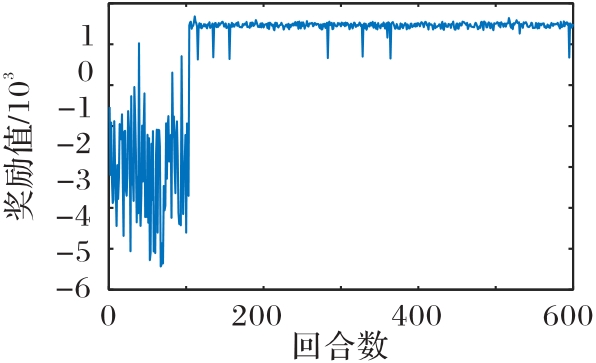
图8 单无人机避障任务的奖励值
Fig. 8 Reward for single UAV obstacle avoidance task
| 无人机 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 无人机1 | 0 | 1 | 1 | |
| 无人机2 | 0 | 0 | 0 | |
| 无人机3 | 1 | 0 | 1 | |
| 无人机4 | 1 | 0 | 1 |
表5 无人机通信拓扑
Tab. 5 UAV communication topology
| 无人机 | 无人机1 | 无人机2 | 无人机3 | 无人机4 |
|---|---|---|---|---|
| 无人机1 | 0 | 1 | 1 | |
| 无人机2 | 0 | 0 | 0 | |
| 无人机3 | 1 | 0 | 1 | |
| 无人机4 | 1 | 0 | 1 |
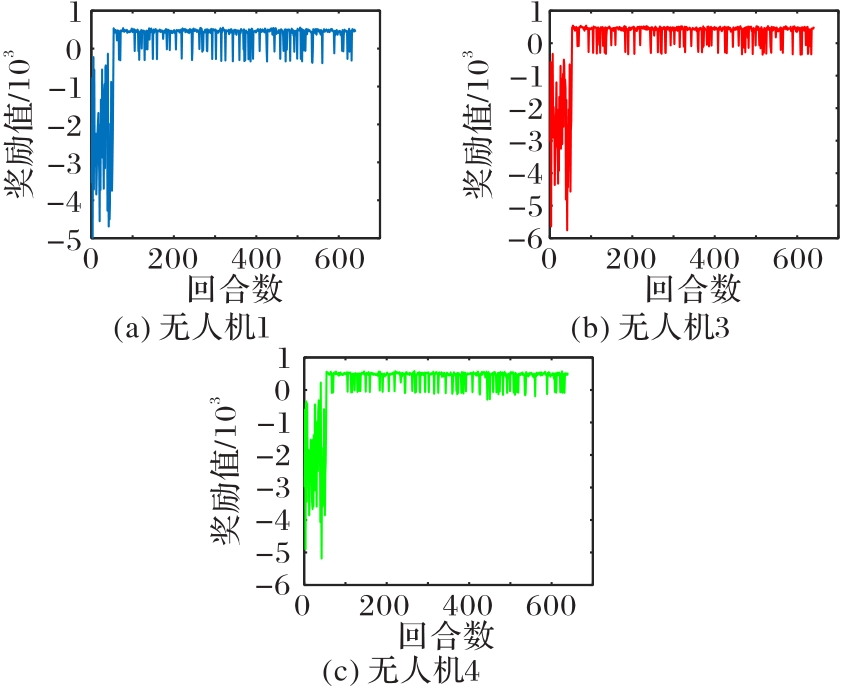
图9 多无人机避障任务的奖励值
Fig. 9 Reward for multi-UAV obstacle avoidance task
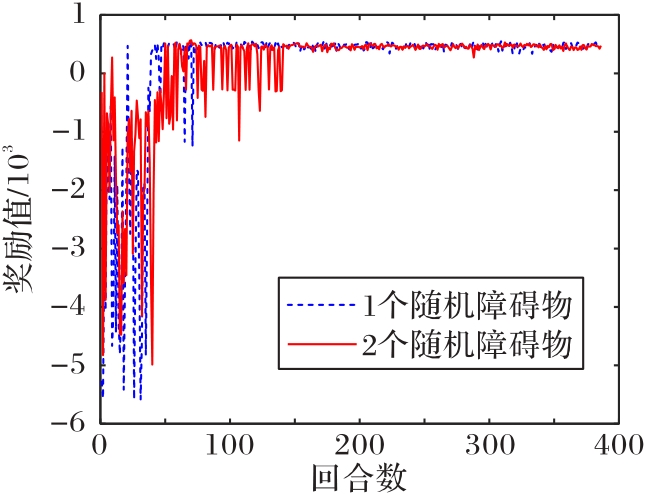
图10 无人机泛化性测试
Fig. 10 UAV generalization test
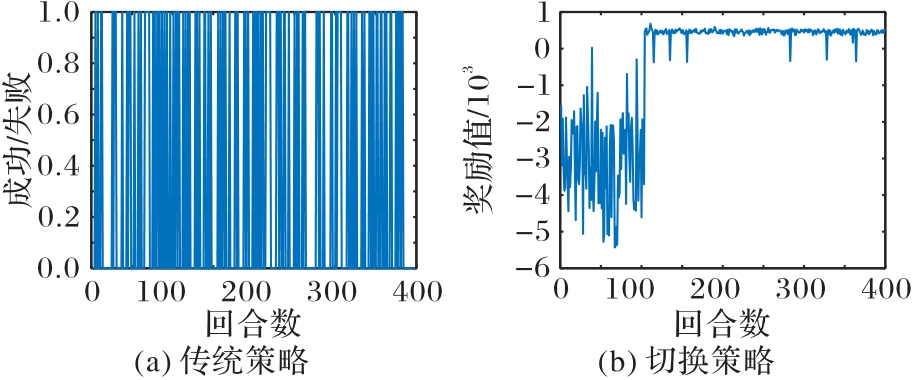
图11 传统策略与切换策略的敛散分布曲线
Fig. 11 Convergence and divergence distribution curves of traditional strategy and switching strategy
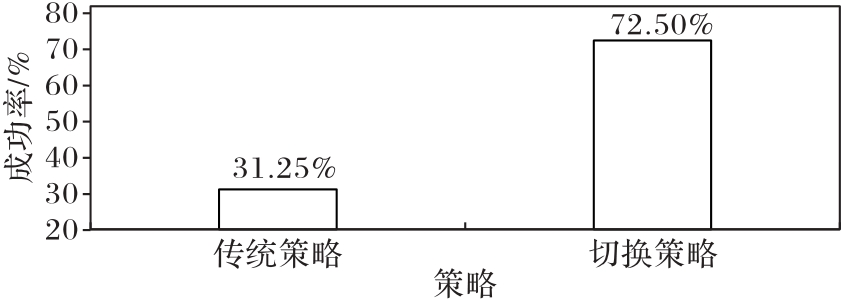
图12 传统策略与切换策略的成功率比较
Fig. 12 Comparison of success rates of traditional strategy and switching strategy
| 1 | LYU M, ZHAO Y, HUANG C, et al. Unmanned aerial vehicles for search and rescue: a survey[J]. Remote Sensing, 2023, 15(13): No.3266. |
| 2 | HU J, NIU H, CARRASCO J, et al. Fault-tolerant cooperative navigation of networked UAV swarms for forest fire monitoring[J]. Aerospace Science and Technology, 2022, 123: No.107494. |
| 3 | MESA A N, STRAGER M P, GRUSHECKY S T, et al. Using unmanned aerial vehicles to evaluate revegetation success on natural gas pipelines[J]. Environmental Management, 2023, 72(3): 671-681. |
| 4 | WANG Y, SHAN M, WANG D. Motion capability analysis for multiple fixed-wing UAV formations with speed and heading rate constraints[J]. IEEE Transactions on Control of Network Systems, 2020, 7(2): 977-989. |
| 5 | LI W, CHEN Y, XIANG L. Cooperative path planning of UAV formation based on improved artificial potential field[C]// Proceedings of the IEEE 2nd International Conference on Electronic Technology, Communication and Information. Piscataway: IEEE, 2022: 636-641. |
| 6 | YU C, CHEN X. Leader-follower formation for UAVs with FOVs constraint[C]// Proceedings of the 22nd IEEE International Conference on Industrial Technology. Piscataway: IEEE, 2021: 1119-1124. |
| 7 | 鲜斌,宋宁. 基于模型预测控制与改进人工势场法的多无人机路径规划[J]. 控制与决策, 2024, 39(7): 2133-2141. |
| XIAN B, SONG N. A multiple UAVs path planning method based on model predictive control and improved artificial potential field[J]. Control and Decision, 2024, 39(7): 2133-2141. | |
| 8 | WANG N, DAI J, YING J. UAV formation obstacle avoidance control algorithm based on improved artificial potential field and consensus[J]. International Journal of Aeronautical and Space Sciences, 2021, 22(6): 1413-1427. |
| 9 | YAN C, WANG C, XIANG X, et al. Deep reinforcement learning of collision-free flocking policies for multiple fixed-wing UAVs using local situation maps[J]. IEEE Transactions on Industrial Informatics, 2022, 18(2): 1260-1270. |
| 10 | 李湛,薛喜地,杨学博,等. 跨传感器异步迁移学习的室内单目无人机避障[J]. 宇航学报, 2020, 41(6):811-819. |
| LI Z, XUE X D, YANG X B, et al. Collision avoidance for indoor monocular UAV using cross-sensor asynchronous transfer learning[J]. Journal of Astronautics, 2020, 41(6): 811-819. | |
| 11 | PENG J, LV B, ZHANG L, et al. An improved DDPG algorithm for UAV navigation in large-scale complex environments[C]// Proceedings of the 2023 IEEE Aerospace Conference. Piscataway: IEEE, 2023: 1-11. |
| 12 | 杨秀霞,高恒杰,刘伟,等. 基于LSTM深度强化学习的UAV反应式避障方法[J]. 飞行力学, 2022, 40(4): 47-55, 62. |
| YANG X X, GAO H J, LIU W, et al. UAV deep reinforcement learning reactive obstacle avoidance method based on LSTM[J]. Flight Dynamics, 2022, 40(4): 47-55, 62. | |
| 13 | 黄号,马文卉,李家诚,等. 未知环境下无人机编队智能避障控制方法[J]. 清华大学学报(自然科学版), 2024, 64(2):358-369. |
| HUANG H, MA W H, LI J C, et al. Intelligent obstacle avoidance control method for unmanned aerial vehicle formations in unknown environments[J]. Journal of Tsinghua University (Science and Technology), 2024, 64(2): 358-369. | |
| 14 | ALREFAEI F, ALZAHRANI A, SONG H, et al. A survey on the jamming and spoofing attacks on the unmanned aerial vehicle networks[C]// Proceedings of the 2022 IEEE International IOT, Electronics and Mechatronics Conference. Piscataway: IEEE, 2022: 1-7. |
| 15 | LY B, LY R. Cybersecurity in Unmanned Aerial Vehicles (UAVs)[J]. Journal of Cyber Security Technology, 2021, 5(2): 120-137. |
| 16 | ZHANG D, SHEN Y P, ZHOU S Q, et al. Distributed secure platoon control of connected vehicles subject to DoS attack: theory and application[J]. IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2021, 51(11): 7269-7278. |
| 17 | WANG X, PARK J H, YANG H. An improved protocol to consensus of delayed MASs with UNMS and aperiodic DoS cyber-attacks[J]. IEEE Transactions on Network Science and Engineering, 2021, 8(3): 2506-2516. |
| [1] | 耿海军, 董赟, 胡治国, 池浩田, 杨静, 尹霞. 基于Attention-1DCNN-CE的加密流量分类方法[J]. 《计算机应用》唯一官方网站, 2025, 45(3): 872-882. |
| [2] | 邓淼磊, 阚雨培, 孙川川, 徐海航, 樊少珺, 周鑫. 基于深度学习的网络入侵检测系统综述[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 453-466. |
| [3] | 王地欣, 王佳昊, 李敏, 陈浩, 胡光耀, 龚宇. 面向水声通信网络的异常攻击检测[J]. 《计算机应用》唯一官方网站, 2025, 45(2): 526-533. |
| [4] | 吴中岱, 韩德志, 蒋海豹, 冯程, 韩冰, 陈重庆. 海洋船舶通信网络安全综述[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2123-2136. |
| [5] | 唐睿, 庞川林, 张睿智, 刘川, 岳士博. D2D通信增强的蜂窝网络中基于DDPG的资源分配[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1562-1569. |
| [6] | 王昱, 关智慧, 李远鹏. 基于轨迹预测和分布式MADDPG的无人机集群追击决策[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3623-3628. |
| [7] | 张钟元, 戴炜, 李光昱, 陈小庆, 邓启波. 基于改进人工势场和一致性协议的协同避障算法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2644-2650. |
| [8] | 轩勃娜, 李进, 宋亚飞, 马泽煊. 基于改进MobileNetV2的恶意代码分类方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2217-2225. |
| [9] | 丁正凯, 傅启明, 陈建平, 陆悠, 吴宏杰, 方能炜, 邢镔. 结合注意力机制与深度强化学习的超短期光伏功率预测[J]. 《计算机应用》唯一官方网站, 2023, 43(5): 1647-1654. |
| [10] | 王群, 袁泉, 李馥娟, 夏玲玲. 零信任网络及其关键技术综述[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1142-1150. |
| [11] | 王龙宝, 栾茵琪, 徐亮, 曾昕, 张帅, 徐淑芳. 基于动态簇粒子群优化的无人机集群路径规划方法[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3816-3823. |
| [12] | 赵琳, 吕科, 郭靖, 宏晨, 向贤财, 薛健, 王泳. 基于深度强化学习的无人机集群协同作战决策方法[J]. 《计算机应用》唯一官方网站, 2023, 43(11): 3641-3646. |
| [13] | 谭庆, 李辉, 吴昊霖, 王壮, 邓书超. 基于奖励预测误差的内在好奇心方法[J]. 《计算机应用》唯一官方网站, 2022, 42(6): 1822-1828. |
| [14] | 邓绍斌, 朱军, 周晓锋, 李帅, 刘舒锐. 基于局部策略交互探索的深度确定性策略梯度的工业过程控制方法[J]. 《计算机应用》唯一官方网站, 2022, 42(5): 1642-1648. |
| [15] | 王月, 江逸茗, 兰巨龙. 基于改进三元组网络和K近邻算法的入侵检测[J]. 计算机应用, 2021, 41(7): 1996-2002. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||