《计算机应用》唯一官方网站 ›› 2023, Vol. 43 ›› Issue (8): 2644-2650.DOI: 10.11772/j.issn.1001-9081.2022070967
所属专题: 前沿与综合应用
• 前沿与综合应用 • 上一篇
张钟元1, 戴炜1, 李光昱1, 陈小庆2, 邓启波1( )
)
Zhongyuan ZHANG1, Wei DAI1, Guangyu LI1, Xiaoqing CHEN2, Qibo DENG1()
摘要:
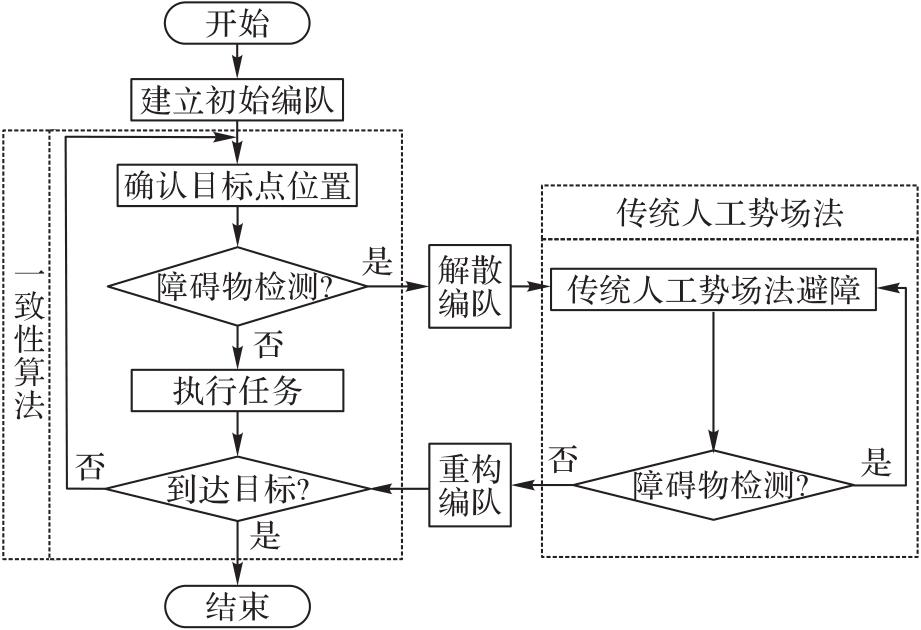
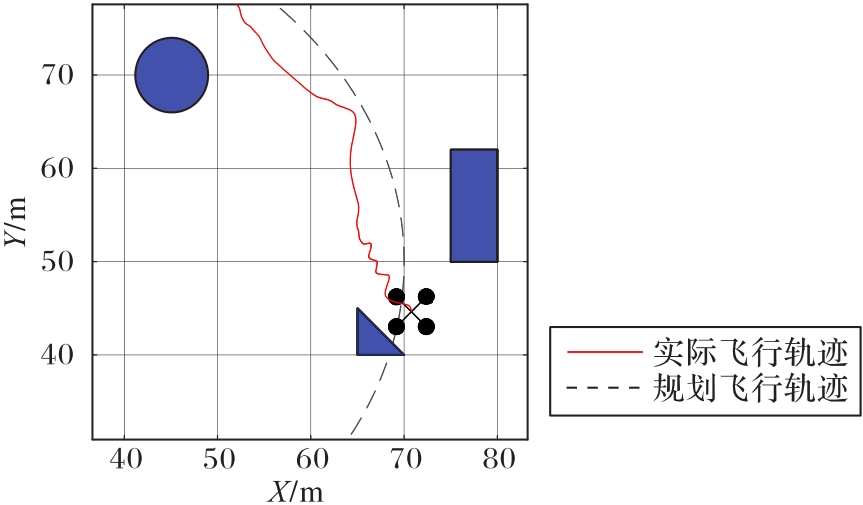
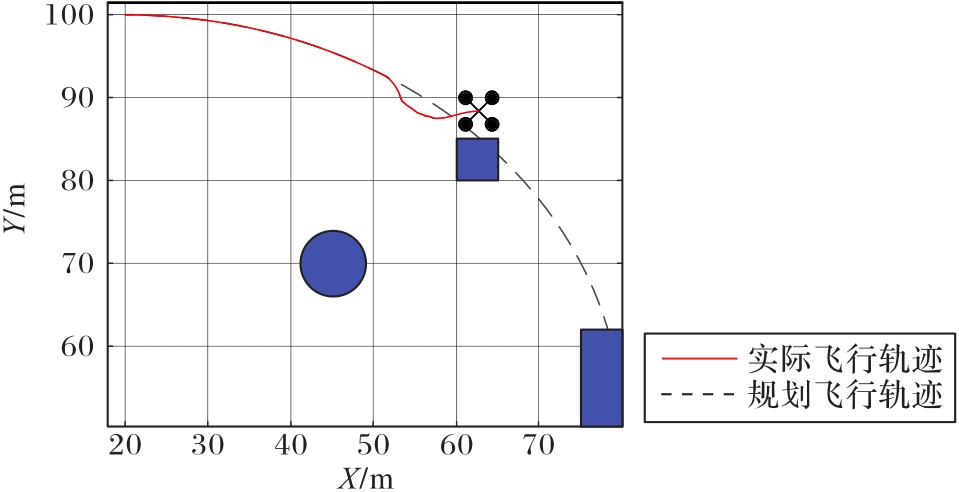
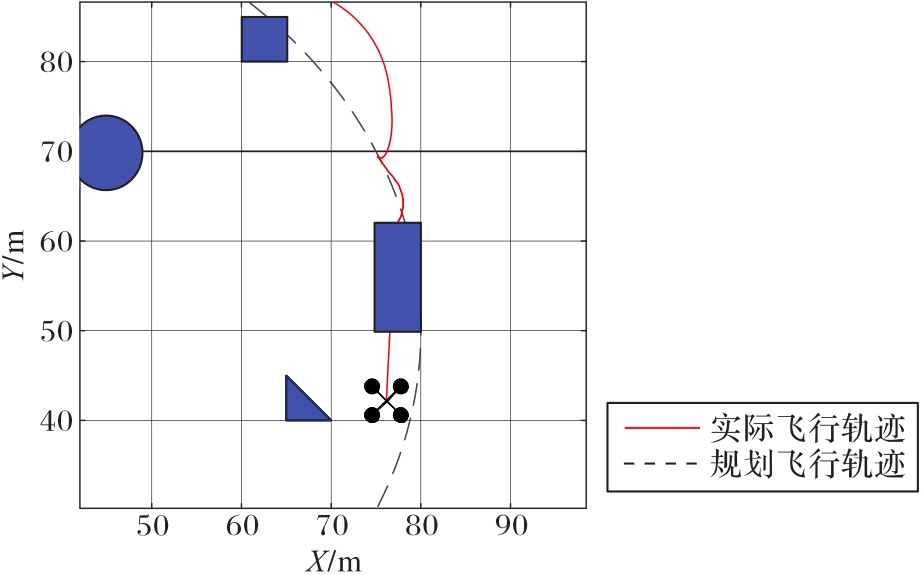
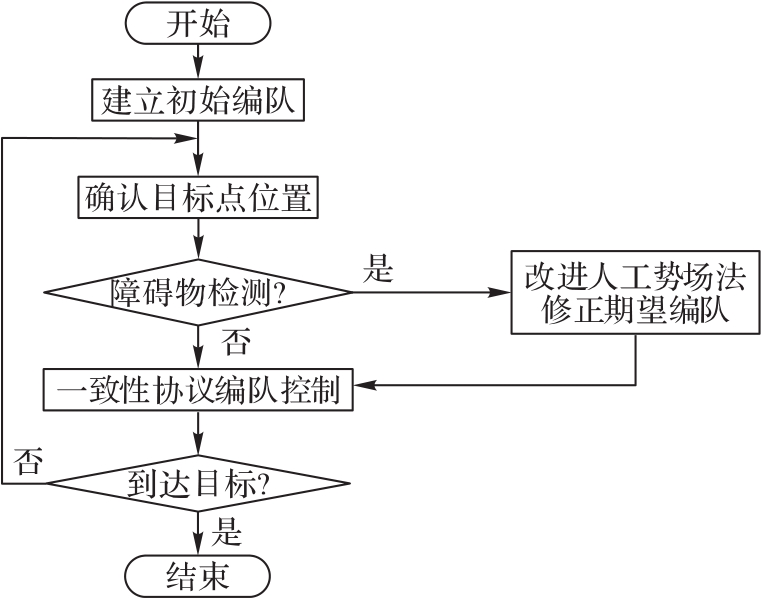
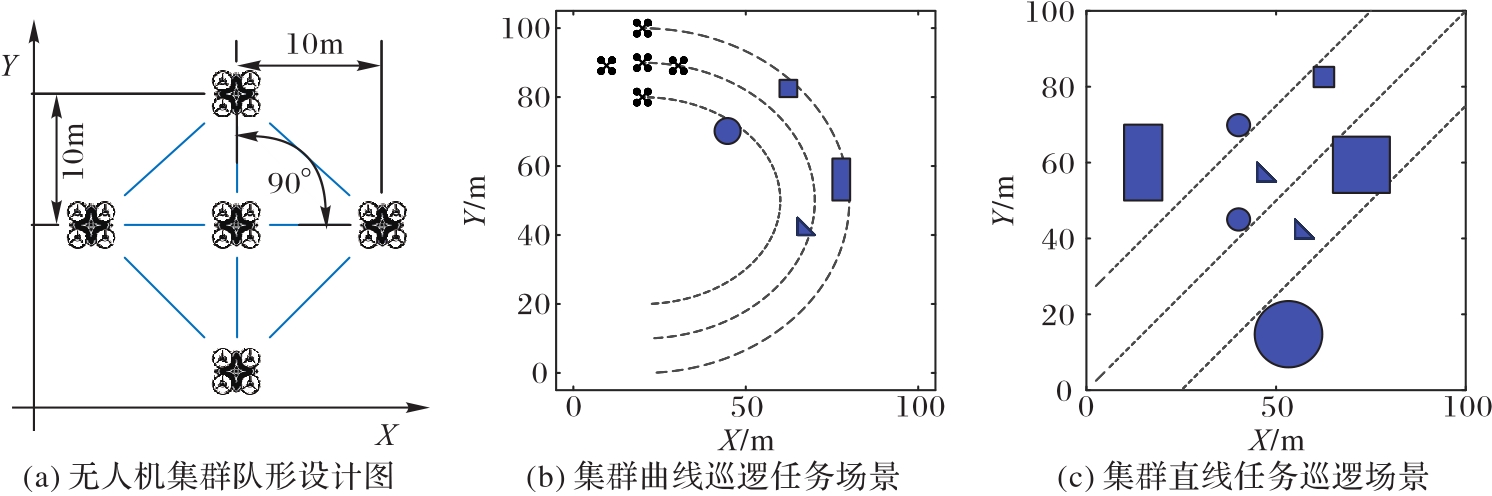
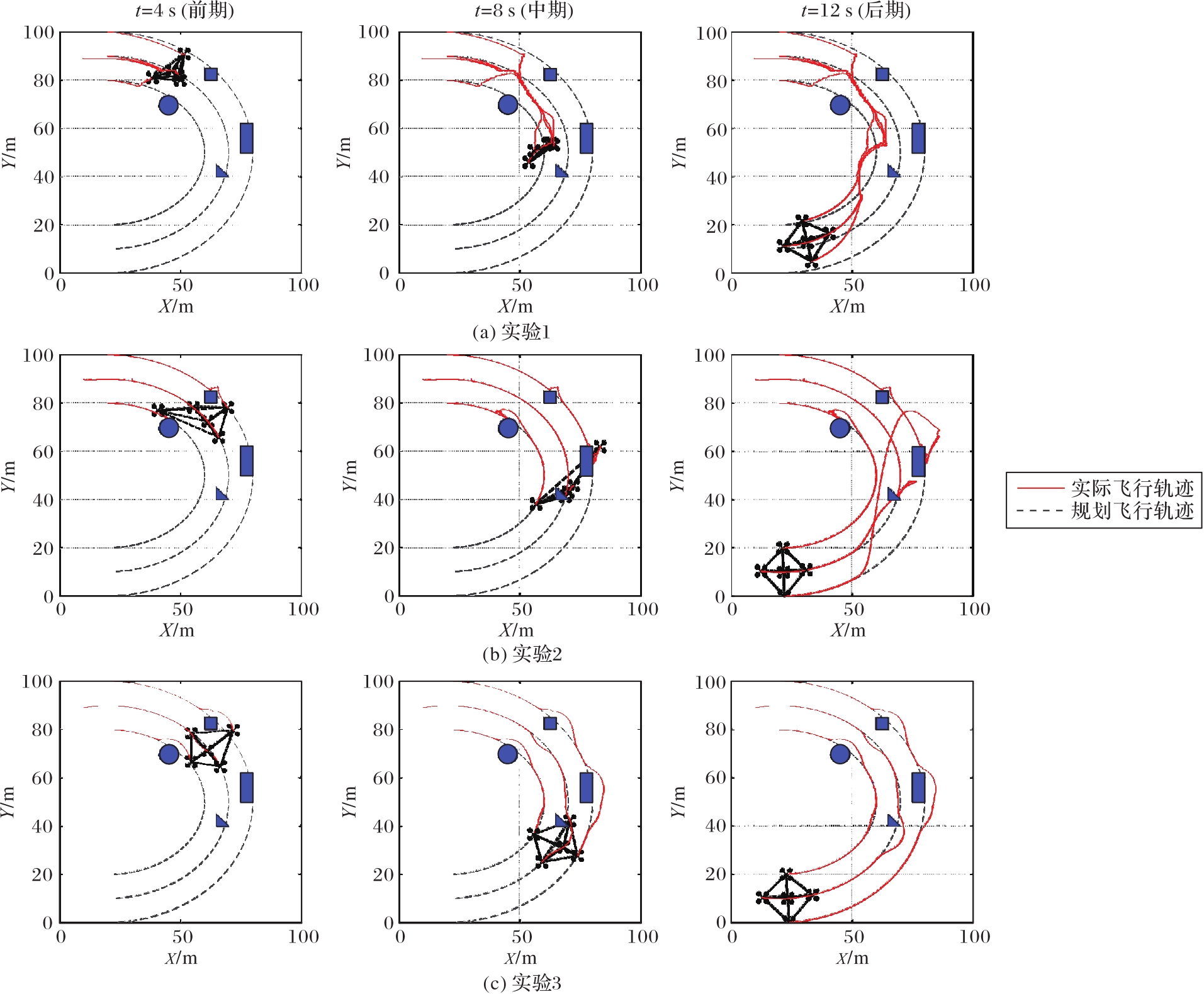
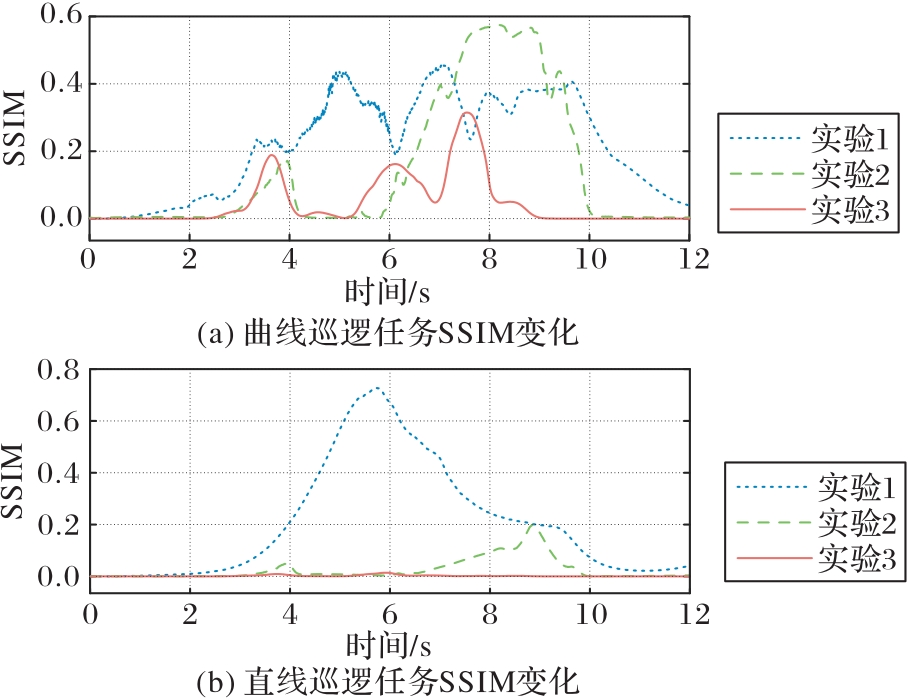
协同避障是无人机(UAV)系统的关键技术之一,而UAV集群避障期间存在队形丢失、任务失效和能源消耗增加等问题。为解决这些问题,提出了一种基于改进人工势场和一致性协议的协同避障算法。首先,根据多旋翼UAV的控制律来设计保持速度、位置一致的控制协议,并采用归一化和高阶指数缩放变换人工势场力,从而解决势场力变化幅度过大导致的振荡失效问题;然后,引入人工势场力调整一致性协议期望编队,从而解决人工势场法与一致性协议组合算法的控制冲突问题。在复杂障碍环境下,所提算法与编队划分避障算法、动态窗口避障算法进行对比仿真的结果表明,所提算法的队形平均损失程度分别下降82.60%、64.38%,任务平均失效程度分别下降98.66%、86.01%,飞行路径总长度分别下降9.95%、17.63%。可见,所提算法适用于多障碍复杂飞行环境。
中图分类号: