


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (2): 654-660.DOI: 10.11772/j.issn.1001-9081.2021122053
• Frontier and comprehensive applications • Previous Articles
Yongdi LI, Caihong LI( ), Yaoyu ZHANG, Guosheng ZHANG
), Yaoyu ZHANG, Guosheng ZHANG
Received:2021-12-09
Revised:2022-02-28
Accepted:2022-03-07
Online:2023-02-08
Published:2023-02-10
Contact:
Caihong LI
About author:LI Yongdi, born in 1996, M. S. candidate. His research interests include detection and control.Supported by:
李永迪, 李彩虹(), 张耀玉, 张国胜
通讯作者:
李彩虹
作者简介:李永迪(1996—),男,山东淄博人,硕士研究生,主要研究方向:检测与控制基金资助:CLC Number:
Yongdi LI, Caihong LI, Yaoyu ZHANG, Guosheng ZHANG. Mobile robot path planning based on improved SAC algorithm[J]. Journal of Computer Applications, 2023, 43(2): 654-660.
李永迪, 李彩虹, 张耀玉, 张国胜. 基于改进SAC算法的移动机器人路径规划[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 654-660.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021122053
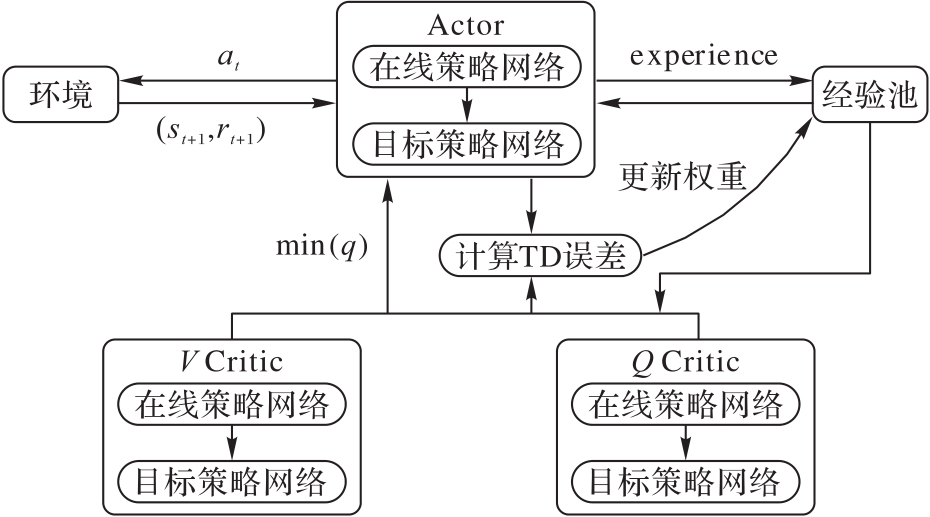
Fig. 1 Network framework of SAC algorithm
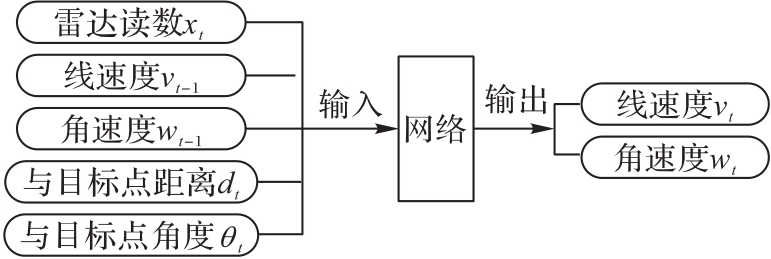
Fig. 2 Network input and output
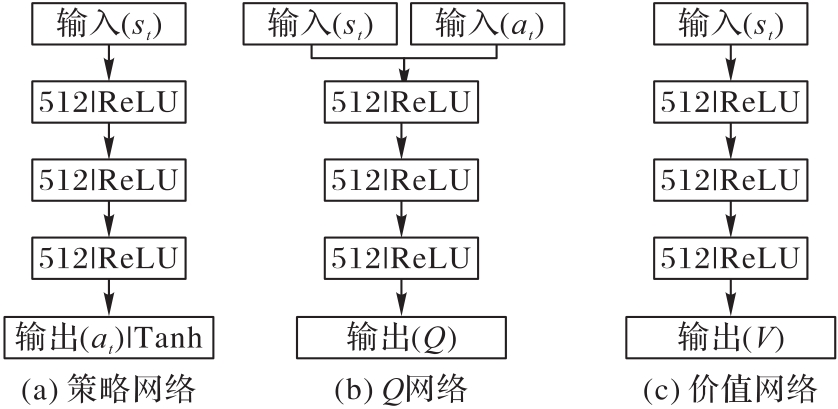
Fig. 3 SAC network structure
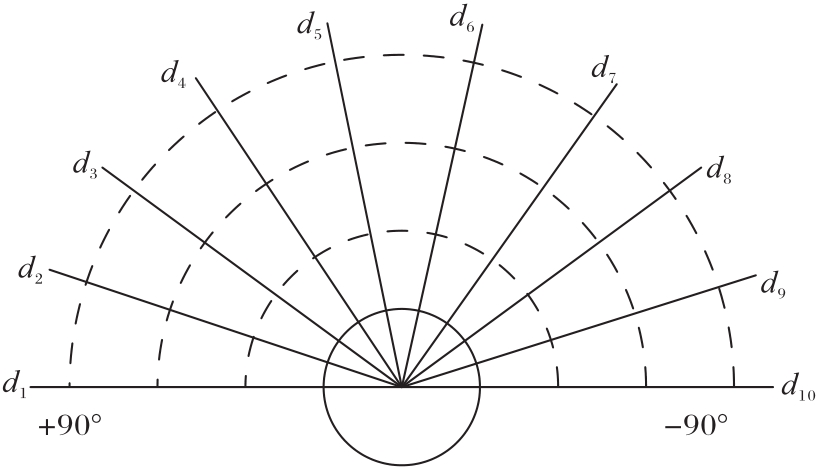
Fig. 4 Lidar data acquisition structure
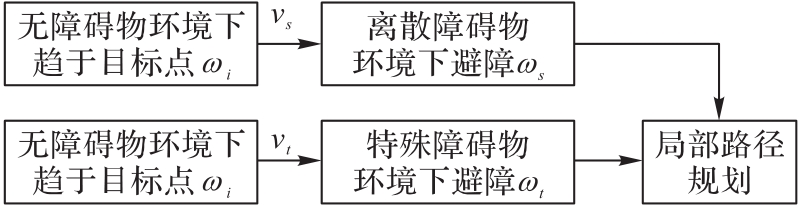
Fig. 5 Transfer learning structure
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 学习率 | 0.000 3 | 每轮学习经验数量 | 256 |
| 折扣系数 | 0.99 | 训练轮数 | 200 |
| 隐藏层神经元个数 | 512 | 每轮训练步数最大值 | 500 |
| 经验池容量 | 50 000 |
Tab. 1 Simulation parameter setting
| 参数 | 数值 | 参数 | 数值 |
|---|---|---|---|
| 学习率 | 0.000 3 | 每轮学习经验数量 | 256 |
| 折扣系数 | 0.99 | 训练轮数 | 200 |
| 隐藏层神经元个数 | 512 | 每轮训练步数最大值 | 500 |
| 经验池容量 | 50 000 |
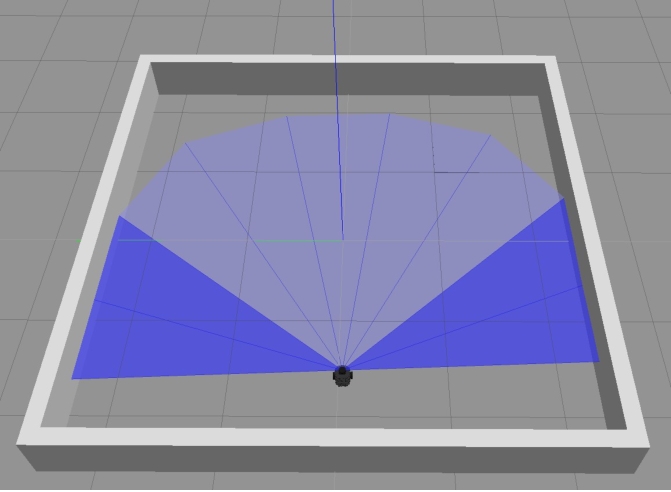
Fig. 6 Obstacle-free simulation environment
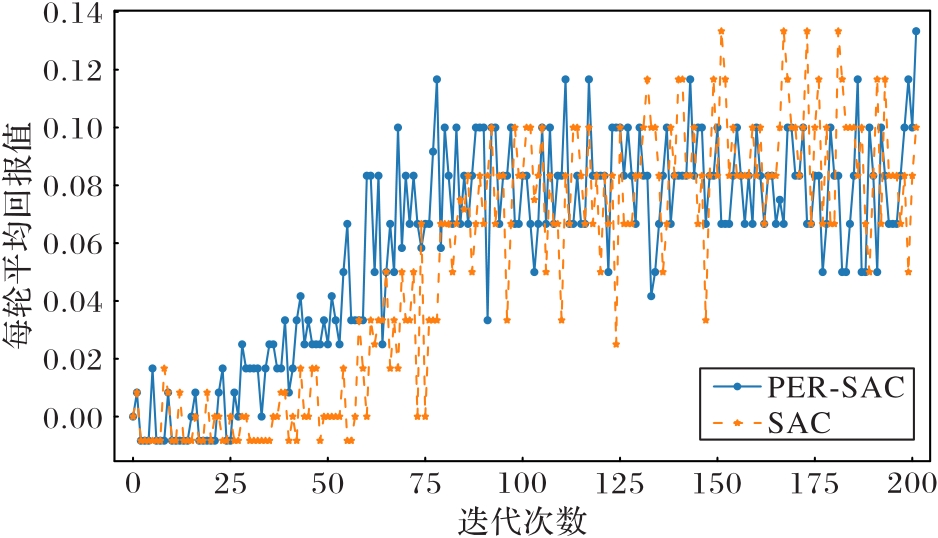
Fig. 7 Comparison of average reward per round of obstacle-free environment
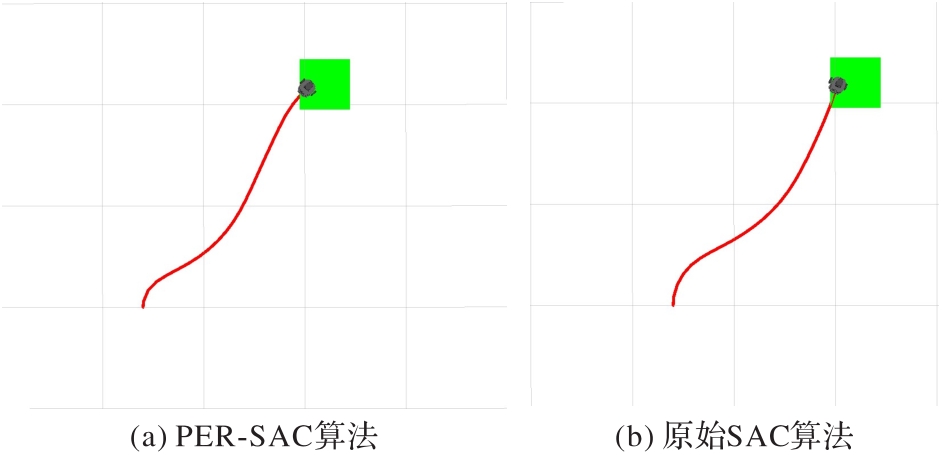
Fig. 8 Path planning in obstacle-free environment
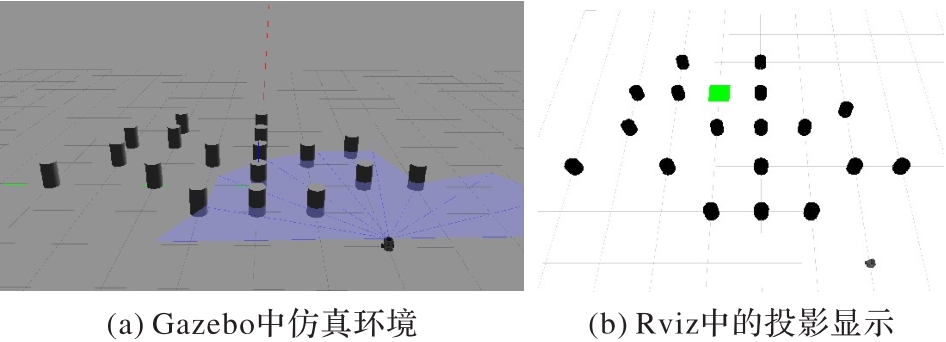
Fig. 9 Discrete obstacle simulation environment
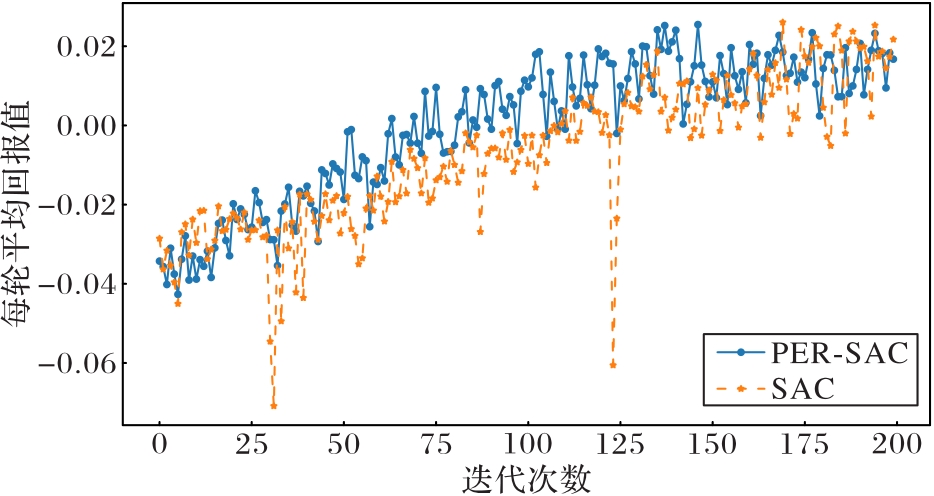
Fig. 10 Comparison of average reward per round in discrete obstacle environment
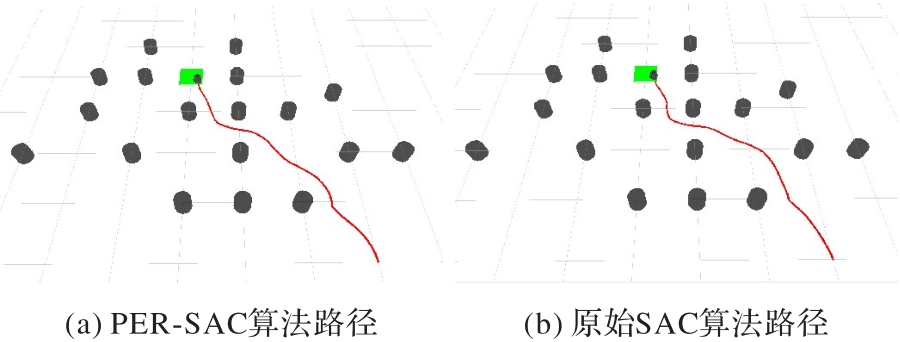
Fig. 11 Path planning in discrete obstacle environment
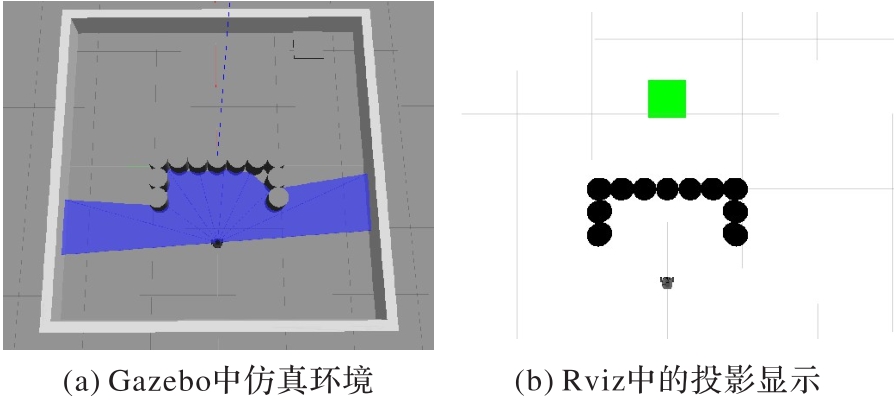
Fig. 12 U-shaped obstacle simulation environment
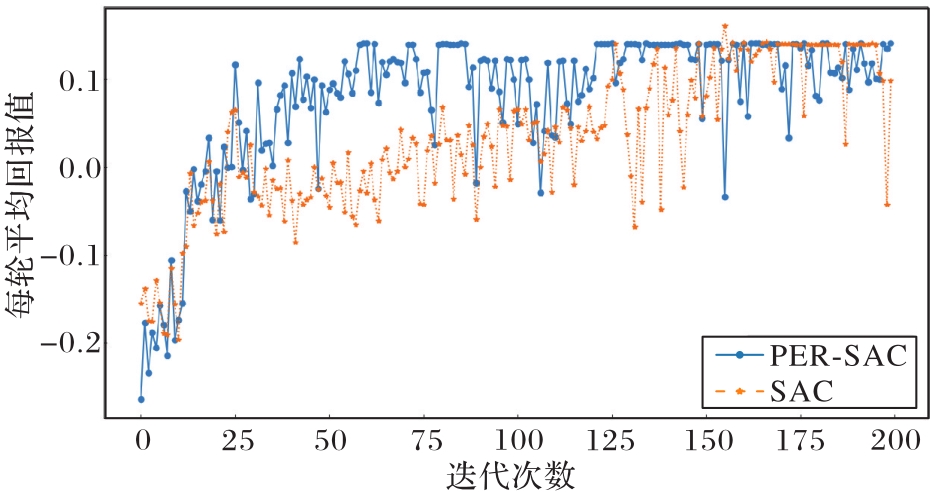
Fig. 13 Comparison of average reward per round in U-shaped obstacle environment
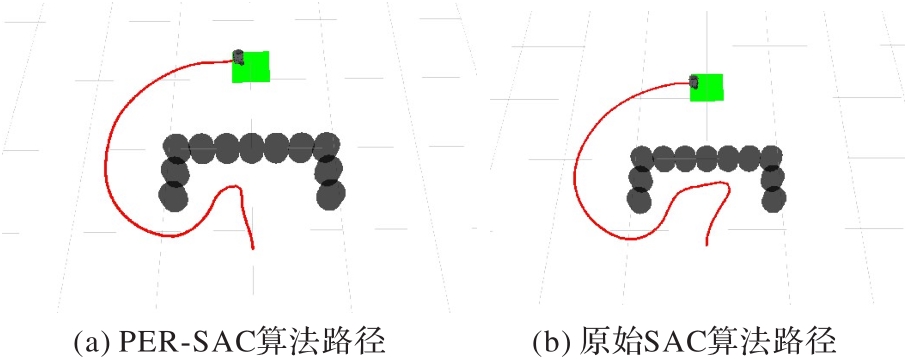
Fig. 14 Path planning in U-shaped obstacle environment
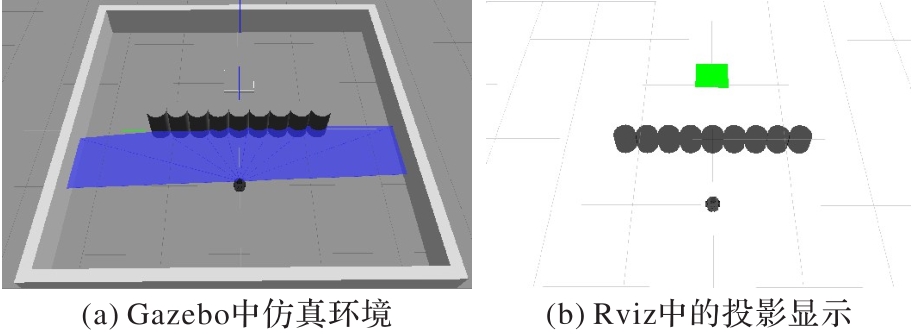
Fig. 15 1-shaped obstacle simulation environment
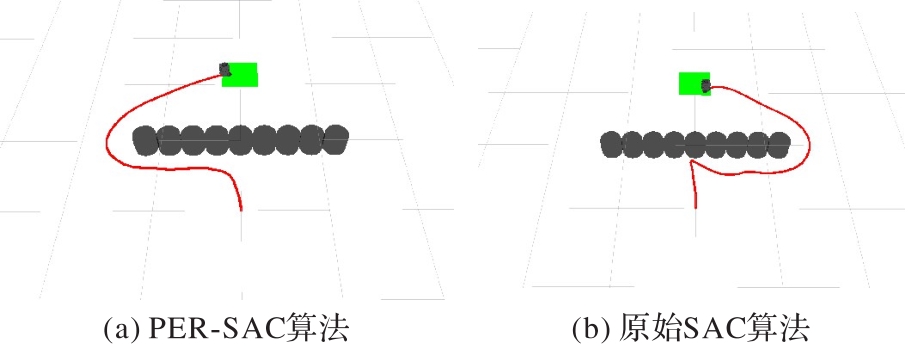
Fig. 16 Path planning in one-shaped obstacle environment
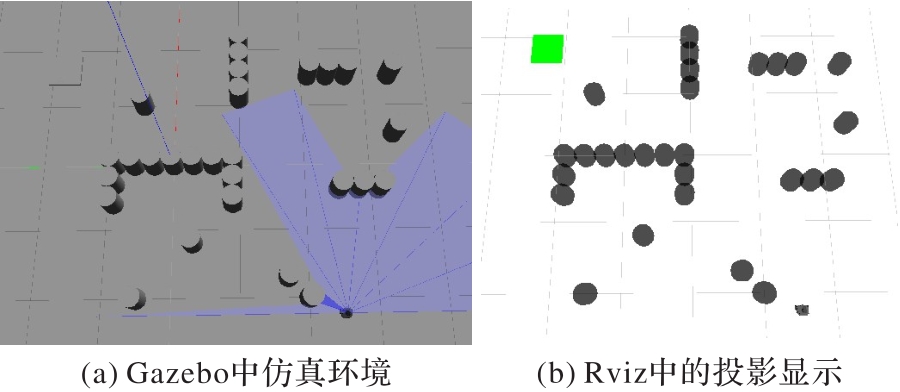
Fig. 17 The first mixed obstacle environment
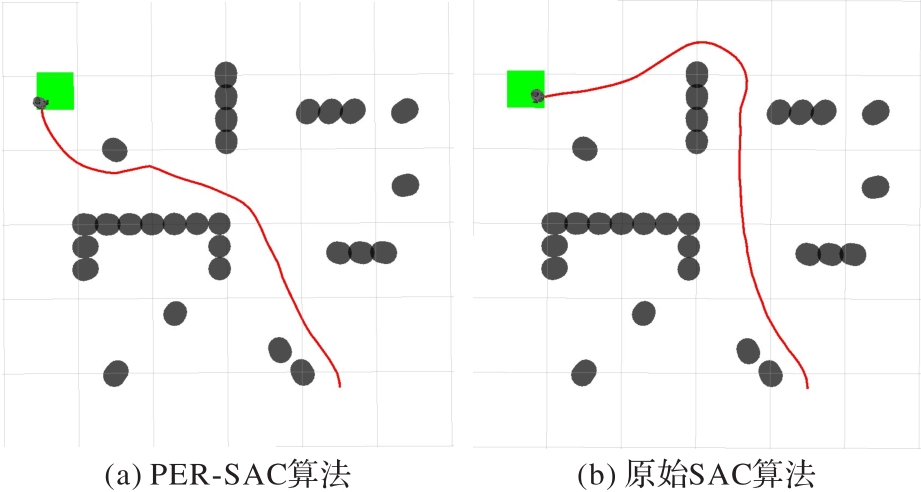
Fig. 18 Path planning in the first mixed obstacle environment
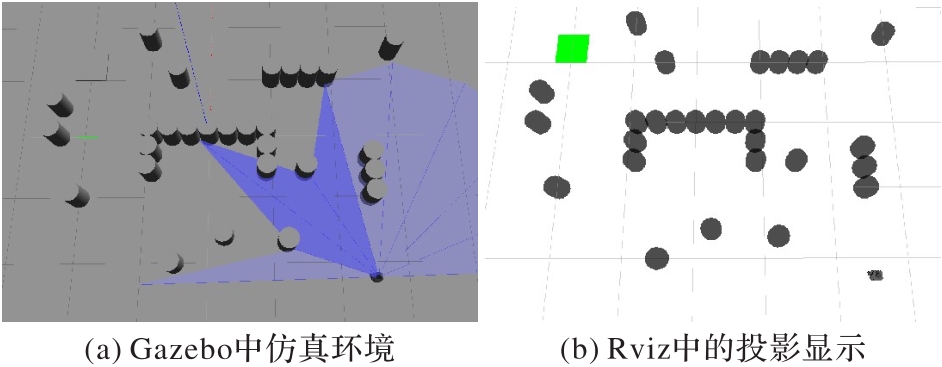
Fig. 19 The second mixed obstacle environment
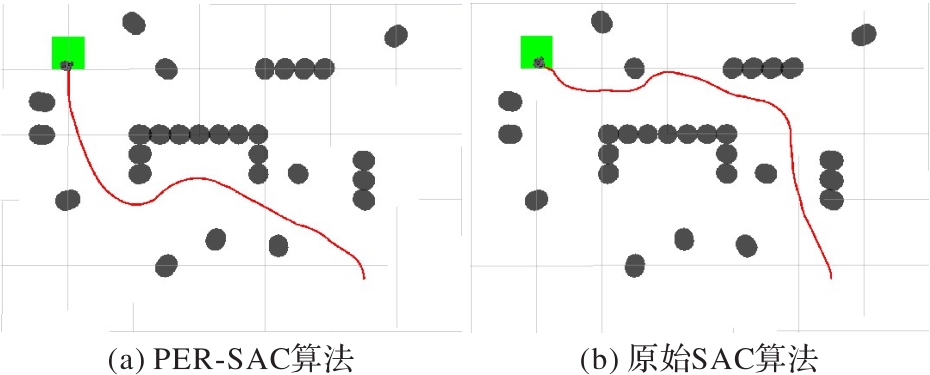
Fig. 20 Path planning in the second mixed obstacle environment
障碍物 类型 | 开始收敛轮数 | 稳定收敛轮数 | ||
|---|---|---|---|---|
| PER-SAC算法 | SAC算法 | PER-SAC算法 | SAC算法 | |
| 无障碍物 | 30 | 60 | 65 | 85 |
| 离散障碍物 | 35 | 60 | 110 | 130 |
| U型障碍物 | 50 | 90 | 135 | 180 |
Tab. 2 Algorithm convergence time
障碍物 类型 | 开始收敛轮数 | 稳定收敛轮数 | ||
|---|---|---|---|---|
| PER-SAC算法 | SAC算法 | PER-SAC算法 | SAC算法 | |
| 无障碍物 | 30 | 60 | 65 | 85 |
| 离散障碍物 | 35 | 60 | 110 | 130 |
| U型障碍物 | 50 | 90 | 135 | 180 |
| 障碍物类型 | PER-SAC算法 | SAC算法 |
|---|---|---|
| 无障碍物 | 115 | 118 |
| 离散障碍物 | 248 | 257 |
| U型障碍物 | 274 | 298 |
| 一型障碍物 | 183 | 226 |
| 混合障碍物一 | 271 | 304 |
| 混合障碍物二 | 279 | 310 |
Tab. 3 Number of steps reaching target
| 障碍物类型 | PER-SAC算法 | SAC算法 |
|---|---|---|
| 无障碍物 | 115 | 118 |
| 离散障碍物 | 248 | 257 |
| U型障碍物 | 274 | 298 |
| 一型障碍物 | 183 | 226 |
| 混合障碍物一 | 271 | 304 |
| 混合障碍物二 | 279 | 310 |
| 1 | 郭凯红,李博昊,宗晓瑞,等. 基于改进人工势场的避障路径规划策略研究[J]. 舰船科学技术, 2021, 43(7): 54-57. |
| GUO K H, LI B H, ZONG X R, et al. Research on path planning based on improved artificial potential field[J]. Ship Science and Technology, 2021, 43(7): 54-57. | |
| 2 | 汪四新,谭功全,蒋沁,等. 基于改进A*算法的移动机器人路径规划[J]. 计算机仿真, 2021, 38(9): 386-389, 404. 10.3969/j.issn.1006-9348.2021.09.077 |
| WANG S X, TAN G Q, JIANG Q, et al. Path planning for mobile robot based on improved A* algorithm[J]. Computer Simulation, 2021, 38 (9): 386-389, 404. 10.3969/j.issn.1006-9348.2021.09.077 | |
| 3 | GURUJI A K, AGARWAL H, PARSEDIYA D K. Time efficient A* algorithm for robot path planning[J]. Procedia Technology, 2016, 23: 144-149. 10.1016/j.protcy.2016.03.010 |
| 4 | 张松灿,普杰信,司彦娜,等. 蚁群算法在移动机器人路径规划中的应用综述[J]. 计算机工程与应用, 2020, 56(8):10-19. |
| ZHANG S C, PU J X, SI Y N, et al. Survey on application of ant colony algorithm in path planning of mobile robot[J]. Computer Engineering and Applications, 2020, 56(8): 10-19. | |
| 5 | MIRJALILI S, DONG J S, LEWIS A. Ant colony optimizer: theory, literature review, and application in AUV path planning: methods and applications[M]// MIRJALILI S, DONG J S, LEWIS A.Nature-Inspired Optimizers: Theories, Literature Reviews and Applications, SCI 811. Cham: Springer, 2020: 7-21. 10.1007/978-3-030-12127-3_2 |
| 6 | 李少波,宋启松,李志昂,等. 遗传算法在机器人路径规划中的研究综述[J]. 科学技术与工程, 2020, 20(2):423-431. 10.3969/j.issn.1671-1815.2020.02.001 |
| LI S B, SONG Q S, LI Z A, et al. Review of genetic algorithm in robot path planning[J]. Science Technology and Engineering, 2020, 20(2): 423-431. 10.3969/j.issn.1671-1815.2020.02.001 | |
| 7 | 吕柏行,郭志光,赵韦皓,等. 标准粒子群算法的优化方式综述[J]. 科学技术创新, 2021(28):33-37. 10.3969/j.issn.1673-1328.2021.28.013 |
| LYU B X, GUO Z G, ZHAO W H, et al. A review on optimization methods of standard particle swarm optimization[J]. Scientific and Technological Innovation, 2021(28): 33-37. 10.3969/j.issn.1673-1328.2021.28.013 | |
| 8 | 王彩霞,林寿英. 基于深度学习的多目标跟踪算法综述[J]. 中阿科技论坛(中英文), 2021(10):118-120. 10.1109/cac53003.2021.9727659 |
| WANG C X, LIN S Y. A survey on multi-target tracking algorithm based on deep learning[J]. China-Arab States Science and Technology Forum, 2021(10): 118-120. 10.1109/cac53003.2021.9727659 | |
| 9 | 李茹杨,彭慧民,李仁刚,等. 强化学习算法与应用综述[J]. 计算机系统应用, 2020, 29(12):13-25. |
| LI R Y, PENG H M, LI R G, et al. Overview on algorithms and applications for reinforcement learning[J]. Computer Systems and Applications, 2020, 29(12): 13-25. | |
| 10 | 张荣霞,武长旭,孙同超,等. 深度强化学习及在路径规划中的研究进展[J]. 计算机工程与应用, 2021, 57(19):44-56. |
| ZHANG R X, WU C X, SUN T C, et al. Progress on deep reinforcement learning in path planning[J]. Computer Engineering and Applications, 2021, 57(19): 44-56. | |
| 11 | HAARNOJA T, ZHOU A, ABBEEL P, et al. Soft actor-critic: off-policy maximum entropy deep reinforcement learning with a stochastic actor[C]// Proceedings of the 35th International Conference on Machine Learning. New York: JMLR.org, 2018: 1861-1870. 10.1109/icra.2018.8460756 |
| 12 | HAARNOJA T, ZHOU A, HARTIKAINEN K, et al. Soft actor-critic algorithms and applications[EB/OL]. (2019-01-29) [2020-06-28].. |
| 13 | DE JESUS J C, KICH V A, KOLLING A H, et al. Soft actor-critic for navigation of mobile robots[J]. Journal of Intelligent and Robotic Systems, 2021, 102(2): No.31. 10.1007/s10846-021-01367-5 |
| 14 | 肖硕,黄珍珍,张国鹏,等. 基于SAC的多智能体深度强化学习算法[J]. 电子学报, 2021, 49(9):1675-1681. 10.12263/DZXB.20200243 |
| XIAO S, HUANG Z Z, ZHANG G P, et al. Deep reinforcement learning algorithm of multi-agent based on SAC[J]. Acta Electronica Sinica, 2021, 49(9): 1675-1681. 10.12263/DZXB.20200243 | |
| 15 | 单麒源,张智豪,张耀心,等. 基于SAC算法的矿山应急救援智能车快速避障控制[J]. 黑龙江科技大学学报, 2021, 31(1):14-20. 10.3969/j.issn.2095-7262.2021.01.003 |
| SHAN Q Y, ZHANG Z H, ZHANG Y X, et al. High speed obstacle avoidance control of mine emergency rescue intelligent vehicle based on SAC algorithm[J]. Journal of Heilongjiang University of Science and Technology, 2021, 31(1): 14-20. 10.3969/j.issn.2095-7262.2021.01.003 | |
| 16 | 胡仕柯,赵海军. 基于改进柔性演员评论家算法的研究[J]. 太原师范学院学报(自然科学版), 2021, 20(3):48-52. |
| HU S K, ZHAO H J. Research on algorithm based on improved soft actor-critic[J]. Journal of Taiyuan Normal University (Natural Science Edition), 2021, 20(3): 48-52. | |
| 17 | 姜玉斌,刘全,胡智慧. 带最大熵修正的行动者评论家算法[J]. 计算机学报, 2020, 43(10):1897-1908. 10.11897/SP.J.1016.2020.01897 |
| JIANG Y B, LIU Q, HU Z H. Actor-critic algorithm with maximum-entropy correction[J]. Chinese Journal of Computers, 2020, 43(10): 1897-1908. 10.11897/SP.J.1016.2020.01897 |
| [1] | Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7): 2294-2300. |
| [2] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [3] | Ziyang SONG, Junhuai LI, Huaijun WANG, Xin SU, Lei YU. Path planning algorithm of manipulator based on path imitation and SAC reinforcement learning [J]. Journal of Computer Applications, 2024, 44(2): 439-444. |
| [4] | Yuanchao LI, Chongben TAO, Chen WANG. Gait control method based on maximum entropy deep reinforcement learning for biped robot [J]. Journal of Computer Applications, 2024, 44(2): 445-451. |
| [5] | Enbao QIAO, Xiangyang GAO, Jun CHENG. Self-recovery adaptive Monte Carlo localization algorithm based on support vector machine [J]. Journal of Computer Applications, 2024, 44(10): 3246-3251. |
| [6] | Dongying ZHU, Yong ZHONG, Guanci YANG, Yang LI. Research progress on motion segmentation of visual localization and mapping in dynamic environment [J]. Journal of Computer Applications, 2023, 43(8): 2537-2545. |
| [7] | Bingqi SHEN, Zhiming ZHANG, Shaolong SHU. UWB-VIO integrated indoor positioning algorithm for mobile robots [J]. Journal of Computer Applications, 2022, 42(12): 3924-3930. |
| [8] | LI Kairong, LIU Shuang, HU Qianqian, TANG Yiyuan. Improved ant colony optimization algorithm for path planning based on turning angle constraint [J]. Journal of Computer Applications, 2021, 41(9): 2560-2568. |
| [9] | LU Guoqing, SUN Hao. Two-dimensional mapping of swarm robot based on random walk [J]. Journal of Computer Applications, 2021, 41(7): 2121-2127. |
| [10] | LUAN Jianing, ZHANG Wei, SUN Wei, ZHANG Ao, HAN Dong. High-accuracy localization algorithm based on fusion of two-dimensional code vision and laser lidar [J]. Journal of Computer Applications, 2021, 41(5): 1484-1491. |
| [11] | Erchao LI, Kuankuan QI. Robot path planning based on B-spline curve and ant colony algorithm [J]. Journal of Computer Applications, 2021, 41(12): 3558-3564. |
| [12] | LIU Ang, JIANG Jin, XU Kefeng. Robot path planning based on improved ant colony and pigeon inspired optimization algorithm [J]. Journal of Computer Applications, 2020, 40(11): 3366-3372. |
| [13] | WANG Kun, ZENG Guohui, LU Dunke, HUANG Bo, LI Xiaobin. Path planning of mobile robot based on improved asymptotically-optimal bidirectional rapidly-exploring random tree algorithm [J]. Journal of Computer Applications, 2019, 39(5): 1312-1317. |
| [14] | CHEN Ruonan, WEN Congcong, PENG Ling, YOU Chengzeng. Application of improved A* algorithm in indoor path planning for mobile robot [J]. Journal of Computer Applications, 2019, 39(4): 1006-1011. |
| [15] | HUANG Chao, LIANG Shengtao, ZHANG Yi, ZHANG Jie. Path planning of mobile robot based on multi-objective grasshopper optimization algorithm [J]. Journal of Computer Applications, 2019, 39(10): 2859-2864. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||