


Journal of Computer Applications ›› 2021, Vol. 41 ›› Issue (12): 3558-3564.DOI: 10.11772/j.issn.1001-9081.2021060888
Special Issue: 第十八届中国机器学习会议(CCML 2021)
• The 18th China Conference on Machine Learning • Previous Articles Next Articles
Received:2021-05-12
Revised:2021-06-13
Accepted:2021-07-05
Online:2021-12-28
Published:2021-12-10
Contact:
Erchao LI
About author:QI Kuankuan, born in 1993, M. S. candidate. His research interests include mobile robot.
Supported by:
李二超( ), 齐款款
), 齐款款
通讯作者:
李二超
作者简介:齐款款(1993—),男,安徽界首人,硕士研究生,主要研究方向:移动机器人。
基金资助:CLC Number:
Erchao LI, Kuankuan QI. Robot path planning based on B-spline curve and ant colony algorithm[J]. Journal of Computer Applications, 2021, 41(12): 3558-3564.
李二超, 齐款款. B样条曲线融合蚁群算法的机器人路径规划[J]. 《计算机应用》唯一官方网站, 2021, 41(12): 3558-3564.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2021060888
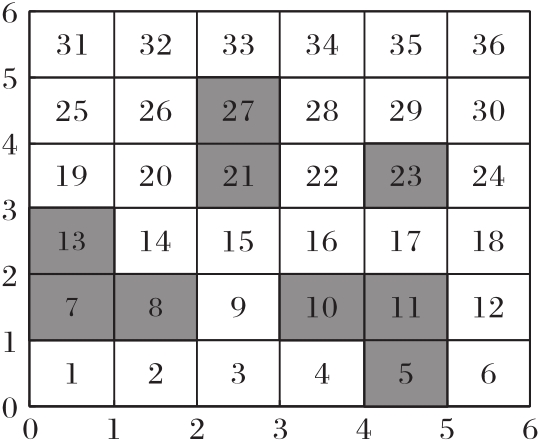
Fig. 1 Grid map
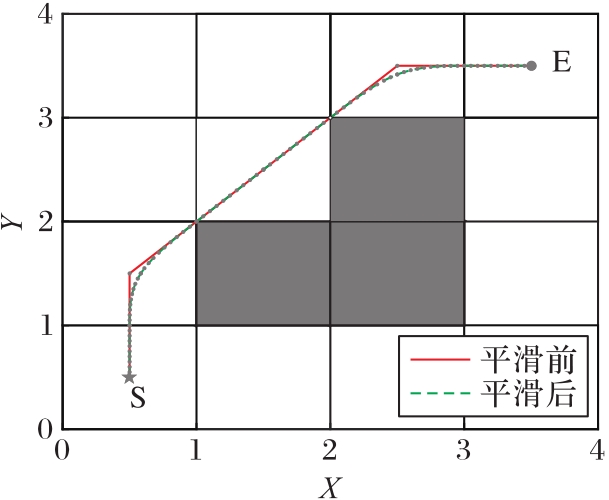
Fig. 2 Simulation diagram of B-spline curve smoothing optimal path
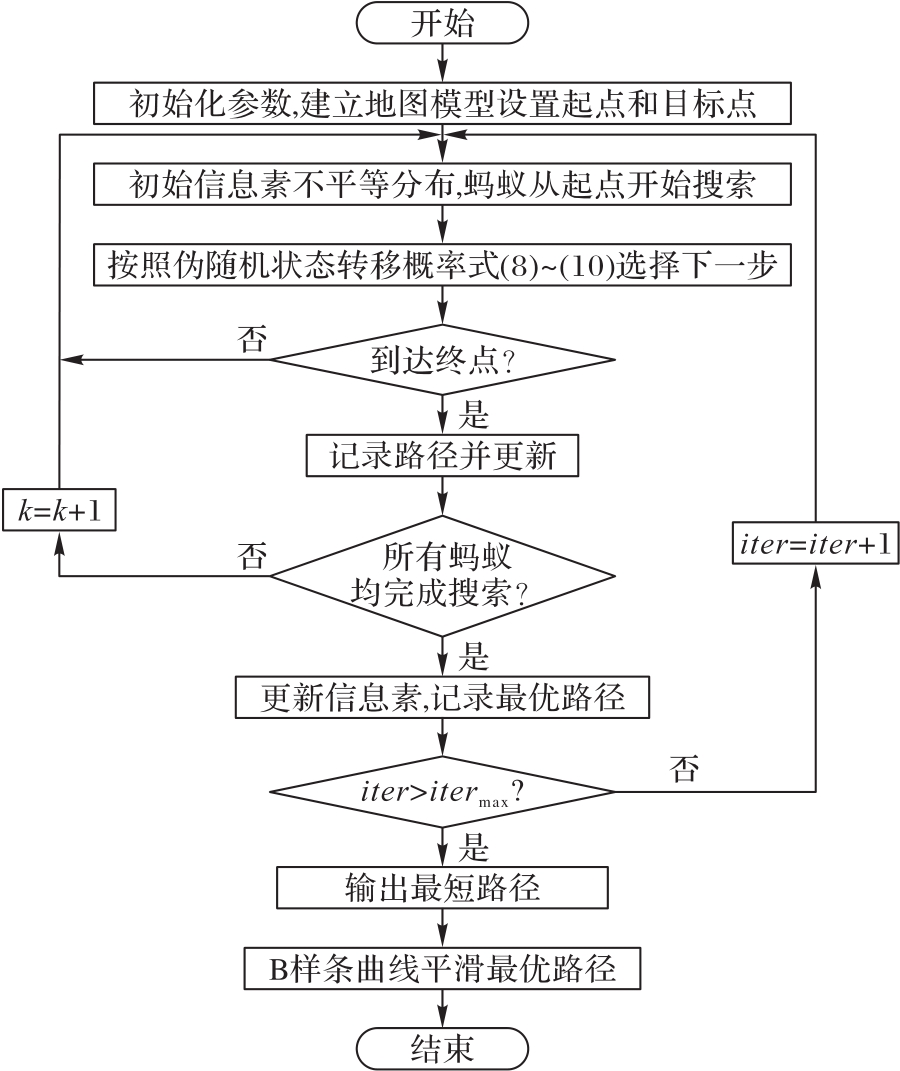
Fig. 3 Flowchart of improved ant colony algorithm
| Q | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| 1 | 48.321 9 | 42.7 |
| 50 | 47.792 6 | 57.2 |
| 100 | 47.421 9 | 53.9 |
| 150 | 46.885 5 | 52.3 |
| 200 | 46.907 7 | 60.6 |
Tab. 1 Influence of parameter Q on path length and iteration times
| Q | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| 1 | 48.321 9 | 42.7 |
| 50 | 47.792 6 | 57.2 |
| 100 | 47.421 9 | 53.9 |
| 150 | 46.885 5 | 52.3 |
| 200 | 46.907 7 | 60.6 |
| [q0, q1] | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.8,0.9] | 46.671 3 | 49.4 |
| [0.7,0.9] | 46.605 6 | 66.9 |
| [0.7,0.8] | 46.659 1 | 55.4 |
| [0.6,0.9] | 46.900 6 | 63.4 |
| [0.6,0.8] | 47.237 0 | 62.1 |
| [0.6,0.7] | 46.705 6 | 66.2 |
| [0.5,0.9] | 48.109 8 | 54.4 |
| [0.5,0.8] | 48.704 7 | 72.3 |
| [0.5,0.7] | 48.368 3 | 54.7 |
| [0.5,0.6] | 48.887 6 | 59.9 |
Tab. 2 Influence of parameters [q0,q1] on path length and iteration times
| [q0, q1] | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.8,0.9] | 46.671 3 | 49.4 |
| [0.7,0.9] | 46.605 6 | 66.9 |
| [0.7,0.8] | 46.659 1 | 55.4 |
| [0.6,0.9] | 46.900 6 | 63.4 |
| [0.6,0.8] | 47.237 0 | 62.1 |
| [0.6,0.7] | 46.705 6 | 66.2 |
| [0.5,0.9] | 48.109 8 | 54.4 |
| [0.5,0.8] | 48.704 7 | 72.3 |
| [0.5,0.7] | 48.368 3 | 54.7 |
| [0.5,0.6] | 48.887 6 | 59.9 |
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.1,0.9] | 46.812 7 | 55.9 |
| [0.1,0.8] | 46.647 0 | 64.7 |
| [0.1,0.7] | 46.547 0 | 54.6 |
| [0.2,0.9] | 46.737 0 | 71.6 |
| [0.2,0.8] | 46.564 2 | 53.0 |
| [0.2,0.7] | 46.588 4 | 53.5 |
| [0.3,0.9] | 46.605 6 | 55.7 |
| [0.3,0.8] | 46.310 6 | 54.8 |
| [0.3,0.7] | 46.429 9 | 68.2 |
Tab. 3 Influence of parameters [ρmin,ρmax] on path length and iteration times
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [0.1,0.9] | 46.812 7 | 55.9 |
| [0.1,0.8] | 46.647 0 | 64.7 |
| [0.1,0.7] | 46.547 0 | 54.6 |
| [0.2,0.9] | 46.737 0 | 71.6 |
| [0.2,0.8] | 46.564 2 | 53.0 |
| [0.2,0.7] | 46.588 4 | 53.5 |
| [0.3,0.9] | 46.605 6 | 55.7 |
| [0.3,0.8] | 46.310 6 | 54.8 |
| [0.3,0.7] | 46.429 9 | 68.2 |
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [1,1] | 47.092 6 | 63.1 |
| [ | 47.061 2 | 44.9 |
| [ | 46.800 6 | 54.6 |
| [ | 46.471 3 | 58.4 |
| [ | 46.724 8 | 48.0 |
| [ | 46.610 6 | 63.1 |
| [ | 46.564 2 | 56.5 |
| [ | 46.659 1 | 49.9 |
| [0.8, 4] | 46.822 7 | 58.4 |
| [ | 47.021 9 | 52.2 |
Tab. 4 Influence of parameters [α,β] on path length and iteration times
| [ | 最短路径长度 | 迭代次数均值 |
|---|---|---|
| [1,1] | 47.092 6 | 63.1 |
| [ | 47.061 2 | 44.9 |
| [ | 46.800 6 | 54.6 |
| [ | 46.471 3 | 58.4 |
| [ | 46.724 8 | 48.0 |
| [ | 46.610 6 | 63.1 |
| [ | 46.564 2 | 56.5 |
| [ | 46.659 1 | 49.9 |
| [0.8, 4] | 46.822 7 | 58.4 |
| [ | 47.021 9 | 52.2 |
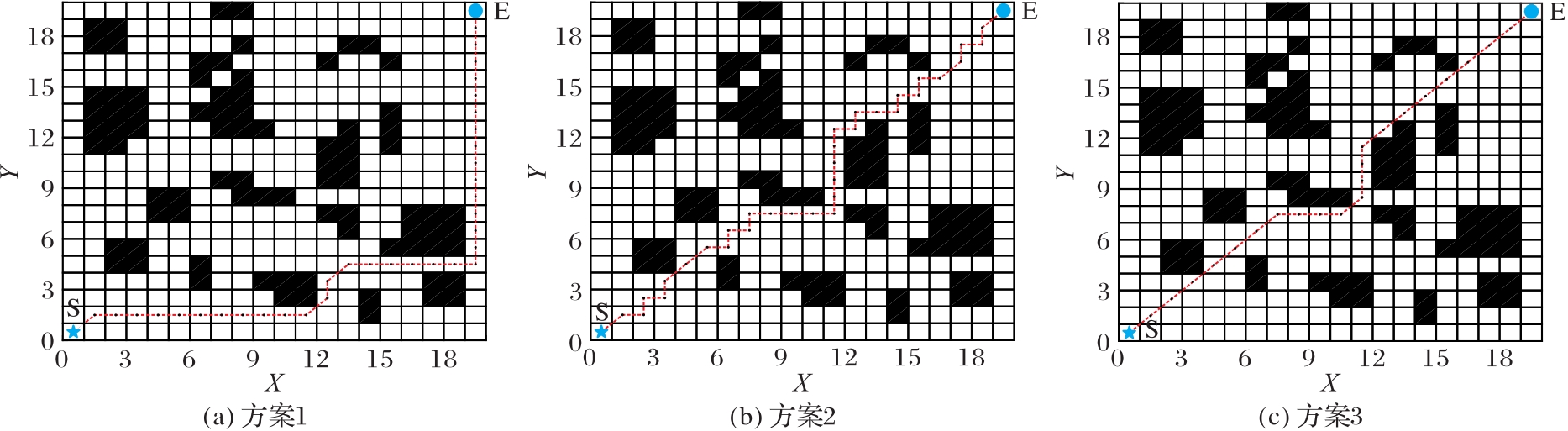
Fig. 6 Comparison of optimal paths of different schemes in 20×20 running environment

Fig. 5 Comparison of optimal paths of each algorithm before and after smoothing in 20×20 running environment
| 算法 | 路径长度 | 最短路径次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 方案1 | 36.242 6 | 37.414 2 | 36.805 0 | 0.16 | 3 | — | 4 | 11 | 7.1 | 1.40 | 20.4 | 7.144 5 |
| 方案2 | 35.071 1 | 36.242 6 | 35.774 0 | 0.33 | 4 | — | 22 | 28 | 25.1 | 1.10 | 43.6 | 6.289 6 |
| 方案3 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | — | 4 | 8 | 4.5 | 1.02 | 1.0 | 4.886 1 |
| 传统算法 | 41.414 2 | 61.414 2 | 50.199 3 | 4.35 | 1 | 39.241 0 | 13 | 41 | 28.1 | 5.70 | 5.9 | 10.846 7 |
| 文献[ | 28.627 4 | 30.627 4 | 29.485 5 | 0.58 | 9 | 28.377 8 | 4 | 16 | 8.6 | 2.59 | 4.0 | 4.121 4 |
| 本文算法 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | 28.377 8 | 4 | 6 | 4.3 | 0.74 | 1.0 | 3.730 4 |
Tab. 5 Simulation results in 20×20 running environment
| 算法 | 路径长度 | 最短路径次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 方案1 | 36.242 6 | 37.414 2 | 36.805 0 | 0.16 | 3 | — | 4 | 11 | 7.1 | 1.40 | 20.4 | 7.144 5 |
| 方案2 | 35.071 1 | 36.242 6 | 35.774 0 | 0.33 | 4 | — | 22 | 28 | 25.1 | 1.10 | 43.6 | 6.289 6 |
| 方案3 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | — | 4 | 8 | 4.5 | 1.02 | 1.0 | 4.886 1 |
| 传统算法 | 41.414 2 | 61.414 2 | 50.199 3 | 4.35 | 1 | 39.241 0 | 13 | 41 | 28.1 | 5.70 | 5.9 | 10.846 7 |
| 文献[ | 28.627 4 | 30.627 4 | 29.485 5 | 0.58 | 9 | 28.377 8 | 4 | 16 | 8.6 | 2.59 | 4.0 | 4.121 4 |
| 本文算法 | 28.627 4 | 28.627 4 | 28.627 4 | 0.00 | 50 | 28.377 8 | 4 | 6 | 4.3 | 0.74 | 1.0 | 3.730 4 |
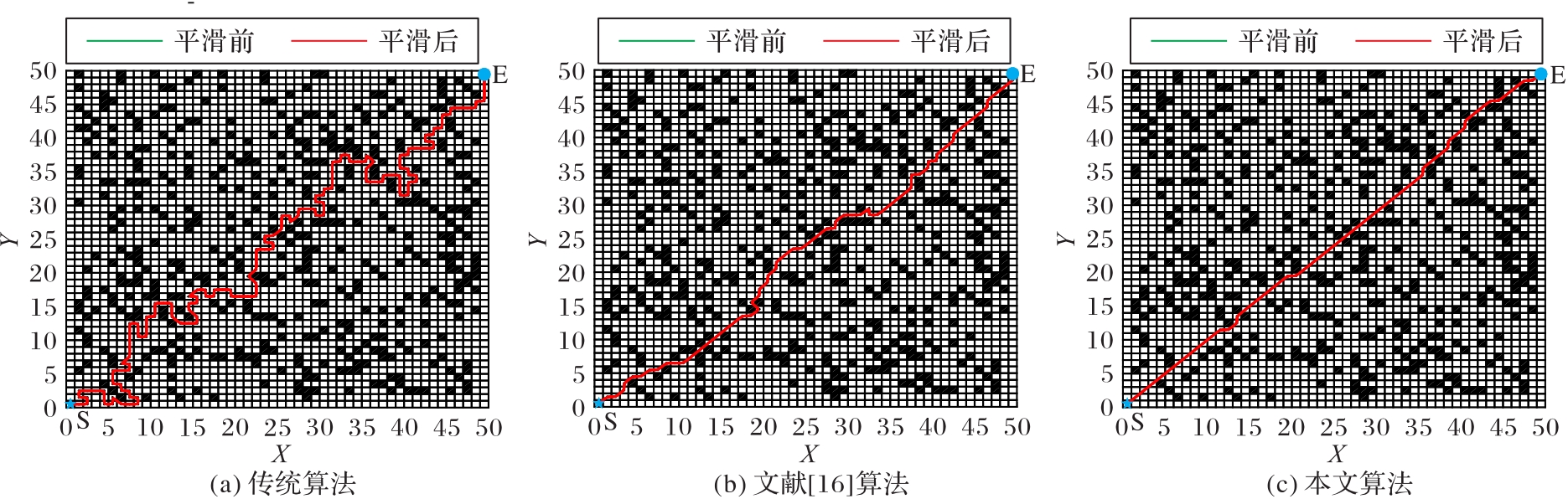
Fig. 6 Comparison of optimal paths of each algorithm before and after smoothing in 50 × 50 complex environment

Fig. 7 Convergence curve of each algorithm in 50 × 50 complex environment
| 算法 | 路径长度 | 最短次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 传统算法 | 159.899 5 | 333.982 8 | 235.697 9 | 42.40 | 1 | 146.179 5 | 102 | 232 | 155.8 | 30.44 | 52.0 | 23.272 0 |
| 文献[ | 78.083 3 | 98.911 7 | 86.409 2 | 3.82 | 1 | 75.956 7 | 34 | 60 | 44.8 | 5.07 | 57.9 | 20.044 6 |
| 本文算法 | 71.639 6 | 71.639 6 | 71.639 6 | 0.00 | 50 | 70.974 1 | 14 | 16 | 15.9 | 0.49 | 1.9 | 16.208 5 |
Tab. 6 Simulation results of three algorithms in 50 × 50 complex environment
| 算法 | 路径长度 | 最短次数 | 本文B样条平滑路径 | 拐点数目 | 迭代次数均值 | 运行时间 均值/s | ||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| 最优值 | 最大值 | 平均值 | 标准差 | 最小 | 最大 | 均值 | 标准差 | |||||
| 传统算法 | 159.899 5 | 333.982 8 | 235.697 9 | 42.40 | 1 | 146.179 5 | 102 | 232 | 155.8 | 30.44 | 52.0 | 23.272 0 |
| 文献[ | 78.083 3 | 98.911 7 | 86.409 2 | 3.82 | 1 | 75.956 7 | 34 | 60 | 44.8 | 5.07 | 57.9 | 20.044 6 |
| 本文算法 | 71.639 6 | 71.639 6 | 71.639 6 | 0.00 | 50 | 70.974 1 | 14 | 16 | 15.9 | 0.49 | 1.9 | 16.208 5 |
| 1 | 杨凯,龙佳,马雪燕,等. 移动机器人改进人工势场的路径规划方法研究[J]. 现代电子技术, 2020, 43(7):141-145. |
| YANG K, LONG J, MA X Y, et al. Research on mobile robot path planning method based on improved artificial potential field [J]. Modern Electronics Technology, 2020, 43(7):141-145. | |
| 2 | 宋宇,王志明. 改进A星算法移动机器人路径规划[J]. 长春工业大学学报, 2019, 40(2):138-141. |
| SONG Y, WANG Z M. Path planning simulation based on improved A star algorithm[J]. Journal of Changchun University of Technology, 2019, 40(2):138-141. | |
| 3 | 王玉,沈丹峰,李耀杰,等. 融合跳点搜索与双向蚁群算法的AGV路径规划[J]. 西安工程大学学报, 2021, 35(1):37-43. 10.13338/j.issn.1674-649x.2021.01.006 |
| WANG Y, SHEN D F, LI Y J, et al. Path planning of AGV based on JPS bidirectional ant colony algorithm[J]. Journal of Xi’an Polytechnic University, 2021, 35(1):37-43. 10.13338/j.issn.1674-649x.2021.01.006 | |
| 4 | 刘超. 基于改进遗传算法的多无人机航路规划方法[J]. 火力与指挥控制, 2019, 44(1):18-22. 10.3969/j.issn.1002-0640.2019.01.004 |
| LIU C. Method of path planning for multi-UAV based on improved genetic algorithm[J]. Fire Control and Command Control, 2019, 44(1):18-22. 10.3969/j.issn.1002-0640.2019.01.004 | |
| 5 | 赵开新,王东署,徐立新. 蚁群遗传算法在移动机器人路径规划中的综合应用研究[J]. 制造业自动化, 2014, 36(17):70-72, 84. 10.3969/j.issn.1009-0134.2014.17.018 |
| ZHAO K X, WANG D S, XU L X. Comprehensive application of ant colony genetic algorithm in mobile robot path planning[J]. Manufacturing Automation, 2014, 36(17):70-72, 84. 10.3969/j.issn.1009-0134.2014.17.018 | |
| 6 | 王晓燕,杨乐,张宇,等. 基于改进势场蚁群算法的机器人路径规划[J]. 控制与决策, 2018, 33(10):1775-1781. 10.13195/j.kzyjc.2017.0639 |
| WANG X Y, YANG L, ZHANG Y, et al. Robot path planning based on improved ant colony algorithm with potential field heuristic[J]. Control and Decision, 2018, 33(10):1775-1781. 10.13195/j.kzyjc.2017.0639 | |
| 7 | 刘泽,金世俊,王庆. 基于改进蚁群算法的移动机器人二维路径规划[J]. 传感器与微系统, 2020, 39(10):149-152. 10.4028/www.scientific.net/amm.385-386.717 |
| LIU Z, JIN S J, WANG Q. 2D path planning of mobile robots based on improved ant colony algorithm[J]. Transducer and Microsystem Technologies, 2020, 39(10):149-152. 10.4028/www.scientific.net/amm.385-386.717 | |
| 8 | 孟冠军,陈信华,陶细佩,等. 基于混合蚁群算法的AGV路径规划[J]. 组合机床与自动化加工技术, 2021(1):70-73. |
| MENG G J, CHEN X H, TAO X P, et al. AGV path planning based on hybrid ant colony algorithm[J]. Modular Machine Tool and Automatic Processing Technique, 2021(1):70-73. | |
| 9 | 曹新亮,王智文,冯晶,等. 基于改进蚁群算法的机器人全局路径规划研究[J]. 计算机工程与科学, 2020, 42(3):564-570. 10.3969/j.issn.1007-130X.2020.03.025 |
| CAO X L, WANG Z W, FENG J, et al. Global path planning of robots path planning based on improved ant colony algorithm[J]. Computer Engineering and Science, 2020, 42(3):564-570. 10.3969/j.issn.1007-130X.2020.03.025 | |
| 10 | 王红君,徐军,赵辉,等. 基于平滑蚁群算法的机器人路径规划[J]. 燕山大学学报, 2017, 41(3):278-282. 10.3969/j.issn.1007-791X.2017.03.012 |
| WANG H J, XU J, ZHAO H, et al. Mobile robot path planning based on smoothing ant colony algorithm[J]. Journal of Yanshan University, 2017, 41(3):278-282. 10.3969/j.issn.1007-791X.2017.03.012 | |
| 11 | LUO Q, WANG H B, ZHENG Y, et al. Research on path planning of mobile robot based on improved ant colony algorithm[J]. Neural Computing and Applications, 2020, 32(6):1555-1566. 10.1007/s00521-019-04172-2 |
| 12 | 李志锟,黄宜庆,徐玉琼. 改进变步长蚁群算法的移动机器人路径规划[J]. 电子测量与仪器学报, 2020, 34(8):15-21. |
| LI Z K, HUANG Y Q, XU Y Q. Path planning of mobile robot based on improved variable step size ant colony algorithm[J]. Journal of Electronic Measurement and Instrumentation, 2020, 34(8):15-21. | |
| 13 | 胡浍冕,于修成. 基于双向搜索策略的改进蚁群路径规划算法[J]. 农业装备与车辆工程, 2019, 57(7):9-12, 20. 10.3969/j.issn.1673-3142.2019.07.003 |
| HU H M, YU X C. Improved ant colony path planning algorithm based on bidirectional search strategy[J]. Agricultural Equipment and Vehicle Engineering, 2019, 57(7):9-12, 20. 10.3969/j.issn.1673-3142.2019.07.003 | |
| 14 | 张军明,张德祥,王硕. 基于优化蚁群算法的机器人路径规划[J]. 自动化技术与应用, 2016, 35(11):6-10, 29. 10.1142/9789813220362_0097 |
| ZHANG J M, ZHANG D X, WANG S. Path planning of robot based on ant colony algorithm[J]. Techniques of Automation and Applications, 2016, 35(11): 6-10, 29. 10.1142/9789813220362_0097 | |
| 15 | 封声飞,雷琦,吴文烈,等. 自适应蚁群算法的移动机器人路径规划[J]. 计算机工程与应用, 2019, 55(17):35-43. 10.3778/j.issn.1002-8331.1903-0401 |
| FENG S F, LEI Q, WU W L, et al. Mobile robot path planning based on adaptive ant colony algorithm[J]. Computer Engineering and Applications, 2019, 55(17): 35-43. 10.3778/j.issn.1002-8331.1903-0401 | |
| 16 | 赵静,汤云峰,蒋国平,等. 基于改进蚁群算法的移动机器人路径规划[J]. 南京邮电大学学报(自然科学版), 2019, 39(6):73-78. 10.14132/j.cnki.1673-5439.2019.06.011 |
| ZHAO J, TANG Y F, JIANG G P, et al. Mobile robot path planning based on improved ant colony algorithm[J]. Journal of Nanjing University of Posts and Telecommunications (Natural Science Edition), 2019, 39(6):73-78. 10.14132/j.cnki.1673-5439.2019.06.011 |
| [1] | Runze TIAN, Yulong ZHOU, Hong ZHU, Gang XUE. Local information based path selection algorithm for service migration [J]. Journal of Computer Applications, 2024, 44(7): 2168-2174. |
| [2] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [3] | Ying HU, Zhihuan CHEN. Trajectory tracking control of wheeled mobile robots under side-slip and slip [J]. Journal of Computer Applications, 2024, 44(7): 2294-2300. |
| [4] | Jianqiang LI, Zhou HE. Hybrid NSGA-Ⅱ for vehicle routing problem with multi-trip pickup and delivery [J]. Journal of Computer Applications, 2024, 44(4): 1187-1194. |
| [5] | Haixin HUANG, Guangwei YU, Shoushan CHENG, Chunming LI. Full coverage path planning of bridge inspection wall-climbing robot based on improved grey wolf optimization [J]. Journal of Computer Applications, 2024, 44(3): 966-971. |
| [6] | Ziyang SONG, Junhuai LI, Huaijun WANG, Xin SU, Lei YU. Path planning algorithm of manipulator based on path imitation and SAC reinforcement learning [J]. Journal of Computer Applications, 2024, 44(2): 439-444. |
| [7] | Jian SUN, Baoquan MA, Zhuiwei WU, Xiaohuan YANG, Tao WU, Pan CHEN. Joint optimization of UAV swarm path planning and task allocation balance in earthquake scenarios [J]. Journal of Computer Applications, 2024, 44(10): 3232-3239. |
| [8] | Enbao QIAO, Xiangyang GAO, Jun CHENG. Self-recovery adaptive Monte Carlo localization algorithm based on support vector machine [J]. Journal of Computer Applications, 2024, 44(10): 3246-3251. |
| [9] | Dongying ZHU, Yong ZHONG, Guanci YANG, Yang LI. Research progress on motion segmentation of visual localization and mapping in dynamic environment [J]. Journal of Computer Applications, 2023, 43(8): 2537-2545. |
| [10] | Yongdi LI, Caihong LI, Yaoyu ZHANG, Guosheng ZHANG. Mobile robot path planning based on improved SAC algorithm [J]. Journal of Computer Applications, 2023, 43(2): 654-660. |
| [11] | Lin HUANG, Qiang FU, Nan TONG. Solving robot path planning problem by adaptively adjusted Harris hawk optimization algorithm [J]. Journal of Computer Applications, 2023, 43(12): 3840-3847. |
| [12] | Chen LIU, Yang CHEN, Hao FU. UAV path planning for persistent monitoring based on value function iteration [J]. Journal of Computer Applications, 2023, 43(10): 3290-3296. |
| [13] | Houming FAN, Shuang MU, Lijun YUE. Collaborative optimization of automated guided vehicle scheduling and path planning considering conflict and congestion [J]. Journal of Computer Applications, 2022, 42(7): 2281-2291. |
| [14] | Sheng CHEN, Jun ZHOU, Xiaobing HU, Ji MA. Optimization of airport arrival procedures based on hybrid simulated annealing algorithm [J]. Journal of Computer Applications, 2022, 42(2): 606-615. |
| [15] | Bingqi SHEN, Zhiming ZHANG, Shaolong SHU. UWB-VIO integrated indoor positioning algorithm for mobile robots [J]. Journal of Computer Applications, 2022, 42(12): 3924-3930. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||