


Journal of Computer Applications ›› 2023, Vol. 43 ›› Issue (10): 3209-3216.DOI: 10.11772/j.issn.1001-9081.2022101536
Special Issue: 多媒体计算与计算机仿真
• Multimedia computing and computer simulation • Previous Articles Next Articles
Jin ZHANG1, Wen XU1, Yuqiao ZHOU2, Kai LIU1( )
)
Received:2022-10-13
Revised:2023-01-10
Accepted:2023-01-11
Online:2023-10-07
Published:2023-10-10
Contact:
Kai LIU
About author:ZHANG Jin, born in 1998, M. S. candidate. His research interests include point cloud analysis, structured light three-dimensional imaging and its applications.Supported by:
张瑾1, 徐文1, 周宇乔2, 刘凯1()
通讯作者:
刘凯
作者简介:张瑾(1998—),男,四川南充人,硕士研究生,主要研究方向:点云分析、结构光三维成像及应用基金资助:CLC Number:
Jin ZHANG, Wen XU, Yuqiao ZHOU, Kai LIU. Multi-contour segmentation algorithm for point cloud slices of irregular objects[J]. Journal of Computer Applications, 2023, 43(10): 3209-3216.
张瑾, 徐文, 周宇乔, 刘凯. 不规则物体点云切片中的多轮廓分割算法[J]. 《计算机应用》唯一官方网站, 2023, 43(10): 3209-3216.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2022101536
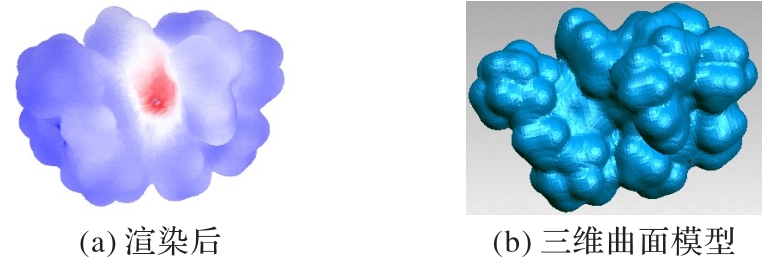
Fig. 1 Experimental point cloud Cat6

Fig. 2 Molecular potential point cloud generation process

Fig. 3 Schematic diagram of contours processed by MC algorithm

Fig. 4 Representative two-layer slice point cloud projection

Fig. 5 INPS algorithm to split point sets

Fig. 6 Contour lines processed by INPS algorithm
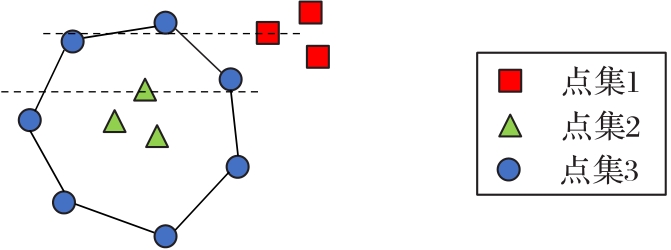
Fig. 7 Position relationship judgment with PIP algorithm

Fig. 8 Multi-contour position relationship
| 参数名 | 值 |
|---|---|
| 点数 | 26 717 |
| 三角面数 | 51 592 |
| 点云体积/Bohr3 | 13 633.485 |
| 分层间隔 | 0.502 645 |
Tab. 1 Cat6 point cloud data information
| 参数名 | 值 |
|---|---|
| 点数 | 26 717 |
| 三角面数 | 51 592 |
| 点云体积/Bohr3 | 13 633.485 |
| 分层间隔 | 0.502 645 |
| 切片位置/Bohr | 标准差 | 分割阈值 | 分割参数/Bohr | 标准差 | 分割阈值 |
|---|---|---|---|---|---|
| -10.64 | 1.767 | 5.023 | 8.46 | 0.187 | 0.866 |
| -7.63 | 1.142 | 3.362 | 8.96 | 1.480 | 4.233 |
| 4.94 | 0.931 | 2.802 | 12.98 | 1.510 | 4.357 |
Tab. 2 Standard deviation and segmentation threshold in PSR algorithm
| 切片位置/Bohr | 标准差 | 分割阈值 | 分割参数/Bohr | 标准差 | 分割阈值 |
|---|---|---|---|---|---|
| -10.64 | 1.767 | 5.023 | 8.46 | 0.187 | 0.866 |
| -7.63 | 1.142 | 3.362 | 8.96 | 1.480 | 4.233 |
| 4.94 | 0.931 | 2.802 | 12.98 | 1.510 | 4.357 |

Fig. 9 Comparison of contour segmentation results at different slice positions (Z-axis) of Cat6 point cloud

Fig. 10 Comparison of contour segmentation results at different slice positions (Y-axis) of Cat6 point cloud

Fig. 11 Comparison of contour segmentation results at different slice positions (X-axis) of Cat6 point cloud
| 算法 | 切片 位置/Bohr | 参考 面积/Bohr3 | 横截 面积/Bohr3 | 绝对 误差/Bohr3 | 相对 误差/% |
|---|---|---|---|---|---|
| INPS | -10.64 | 191.855 6 | 191.931 6 | 0.076 0 | 0.039 6 |
| -7.63 | 514.623 9 | 514.690 4 | 0.066 5 | 0.012 9 | |
| 4.94 | 598.201 2 | 598.054 5 | 0.146 7 | 0.024 5 | |
| 8.46 | 432.881 8 | 432.500 2 | 0.381 6 | 0.088 2 | |
| 8.96 | 384.347 8 | 383.921 6 | 0.426 2 | 0.110 9 | |
| 12.98 | 76.843 3 | 76.450 1 | 0.393 2 | 0.511 7 | |
| PSR | -0.64 | 191.855 6 | 198.064 1 | 6.208 5 | 3.236 0 |
| -7.63 | 514.623 9 | 515.032 5 | 0.408 6 | 0.079 4 | |
| 4.94 | 598.201 2 | 598.383 4 | 0.182 2 | 0.030 5 | |
| 8.46 | 432.881 8 | 432.649 6 | 0.232 2 | 0.053 6 | |
| 8.96 | 384.347 8 | 384.519 3 | 0.171 5 | 0.044 6 | |
| 12.98 | 76.843 3 | 65.769 5 | 11.073 5 | 14.410 5 |
Tab. 3 Comparison of cross-sectional area calculation results at different slice positions (Z-axis) of Cat6 point cloud
| 算法 | 切片 位置/Bohr | 参考 面积/Bohr3 | 横截 面积/Bohr3 | 绝对 误差/Bohr3 | 相对 误差/% |
|---|---|---|---|---|---|
| INPS | -10.64 | 191.855 6 | 191.931 6 | 0.076 0 | 0.039 6 |
| -7.63 | 514.623 9 | 514.690 4 | 0.066 5 | 0.012 9 | |
| 4.94 | 598.201 2 | 598.054 5 | 0.146 7 | 0.024 5 | |
| 8.46 | 432.881 8 | 432.500 2 | 0.381 6 | 0.088 2 | |
| 8.96 | 384.347 8 | 383.921 6 | 0.426 2 | 0.110 9 | |
| 12.98 | 76.843 3 | 76.450 1 | 0.393 2 | 0.511 7 | |
| PSR | -0.64 | 191.855 6 | 198.064 1 | 6.208 5 | 3.236 0 |
| -7.63 | 514.623 9 | 515.032 5 | 0.408 6 | 0.079 4 | |
| 4.94 | 598.201 2 | 598.383 4 | 0.182 2 | 0.030 5 | |
| 8.46 | 432.881 8 | 432.649 6 | 0.232 2 | 0.053 6 | |
| 8.96 | 384.347 8 | 384.519 3 | 0.171 5 | 0.044 6 | |
| 12.98 | 76.843 3 | 65.769 5 | 11.073 5 | 14.410 5 |
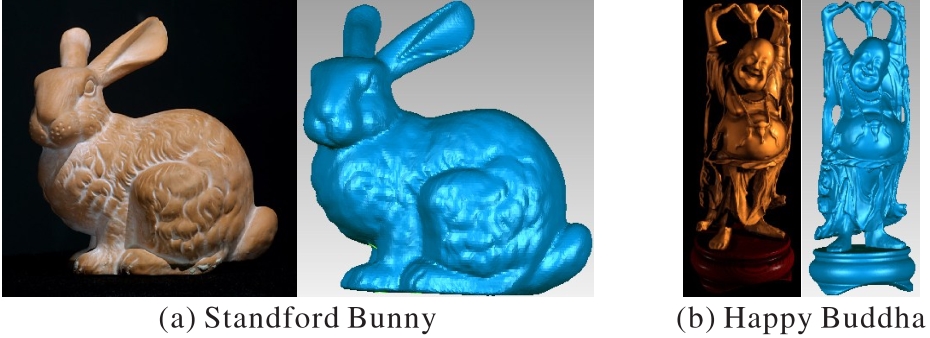
Fig. 12 Real entities and three-dimensional surface models
| 参数名 | Stanford Bunny | Happy Buddha |
|---|---|---|
| 点数 | 1 040 752 | 10 010 722 |
| 三角面数 | 2 081 496 | 10 005 248 |
| 点云体积/mm3 | 753 955 | 354 206 |
| 分层间隔 | 1 | 1 |
| 参数 | 5 | 4 |
| 投影厚度 | 0.053 192 8 | 0.016 786 6 |
Tab. 4 Data processing parameters for two point clouds
| 参数名 | Stanford Bunny | Happy Buddha |
|---|---|---|
| 点数 | 1 040 752 | 10 010 722 |
| 三角面数 | 2 081 496 | 10 005 248 |
| 点云体积/mm3 | 753 955 | 354 206 |
| 分层间隔 | 1 | 1 |
| 参数 | 5 | 4 |
| 投影厚度 | 0.053 192 8 | 0.016 786 6 |

Fig. 13 Comparison of contour segmentation results at different slice positions (Z-axis) of Stanford Bunny point cloud

Fig. 14 Comparison of contour segmentation results at different slice positions (Z-axis) of Happy Buddha point cloud
| 实验数据 | 切片位置/mm | 误差/% | |
|---|---|---|---|
| INPS | PSR | ||
| Stanford Buuny | -19.52 | 0.035 2 | 0.129 8 |
| -13.02 | 0.020 5 | 0.241 2 | |
| -8.02 | 0.080 3 | 0.060 3 | |
| -2.02 | 0.014 4 | 0.047 9 | |
| 38.48 | 0.015 2 | 0.085 7 | |
| 42.98 | 0.036 9 | 0.052 1 | |
| Happy Buddha | 64.00 | 0.006 6 | 0.006 8 |
| 82.00 | 0.030 0 | 0.028 0 | |
| 129.00 | 0.000 8 | 0.000 4 | |
| 167.00 | 0.029 7 | 0.029 4 | |
| 219.00 | 0.093 7 | 0.044 9 | |
| 239.00 | 0.016 8 | 0.021 1 | |
Tab. 5 Comparison of 6 cross-sectional area errors in Stanford Bunny and Happy Buddha point clouds by using PSR and INPS algorithms
| 实验数据 | 切片位置/mm | 误差/% | |
|---|---|---|---|
| INPS | PSR | ||
| Stanford Buuny | -19.52 | 0.035 2 | 0.129 8 |
| -13.02 | 0.020 5 | 0.241 2 | |
| -8.02 | 0.080 3 | 0.060 3 | |
| -2.02 | 0.014 4 | 0.047 9 | |
| 38.48 | 0.015 2 | 0.085 7 | |
| 42.98 | 0.036 9 | 0.052 1 | |
| Happy Buddha | 64.00 | 0.006 6 | 0.006 8 |
| 82.00 | 0.030 0 | 0.028 0 | |
| 129.00 | 0.000 8 | 0.000 4 | |
| 167.00 | 0.029 7 | 0.029 4 | |
| 219.00 | 0.093 7 | 0.044 9 | |
| 239.00 | 0.016 8 | 0.021 1 | |
| 算法 | 实验数据 | 体积V | 绝对误差 | 相对误差/% | 层数 | ||
|---|---|---|---|---|---|---|---|
| 激光扫描/mm | 分子点云/Bohr3 | 激光扫描/mm | 分子点云/Bohr3 | ||||
| PSR | Stanford Bunny | 753 276 | 679 | 0.090 1 | 120 | ||
| Happy Buddha | 353 998 | 208 | 0.058 7 | 198 | |||
| Cat6 | 13 638.832 | 5.347 | 0.039 2 | 54 | |||
| INPS | Stanford Bunny | 753 727 | 568 | 0.075 3 | 120 | ||
| Happy Buddha | 354 323 | 117 | 0.033 0 | 198 | |||
| Cat6 | 13 630.485 | 3.085 | 0.022 6 | 54 | |||
Tab. 6 Comparison of three sets of data volume measurement results by using PSR and INPS algorithms
| 算法 | 实验数据 | 体积V | 绝对误差 | 相对误差/% | 层数 | ||
|---|---|---|---|---|---|---|---|
| 激光扫描/mm | 分子点云/Bohr3 | 激光扫描/mm | 分子点云/Bohr3 | ||||
| PSR | Stanford Bunny | 753 276 | 679 | 0.090 1 | 120 | ||
| Happy Buddha | 353 998 | 208 | 0.058 7 | 198 | |||
| Cat6 | 13 638.832 | 5.347 | 0.039 2 | 54 | |||
| INPS | Stanford Bunny | 753 727 | 568 | 0.075 3 | 120 | ||
| Happy Buddha | 354 323 | 117 | 0.033 0 | 198 | |||
| Cat6 | 13 630.485 | 3.085 | 0.022 6 | 54 | |||
| 1 | 郭仁忠. 空间分析[M]. 2版. 北京:高等教育出版社, 2001: 143-145. |
| GUO R Z. Spatial Analysis[M]. 2nd ed. Beijing: Higher Education Press, 2001: 143-145. | |
| 2 | ANDERSEN H E. Estimation of critical forest structure metrics through the spatial analysis of airborne laser scanner data[D]. Seattle, WA: University of Washington, 2003: 197-202. 10.1109/ICI.2011.40 |
| 3 | 刘明学,崔进业. 基于点云三维坐标数据计算复杂物体体积[J]. 测绘地理信息, 2018, 43(3): 96-98. |
| LI M X, CUI J Y. Calculate volume of complex objects based on 3D coordinates of points cloud data[J]. Journal of Geomatics, 2018, 43(3): 96-98. | |
| 4 | 魏言标,郑磊,薛少兵,等. 基于三坐标测量和3D扫描的凸轮逆向建模设计[J]. 机械设计, 2021, 38(9): 71-74. |
| WEI Y B, ZHENG L, XUE S B, et al. Reverse modeling design of the cam based on three-coordinate measurement and 3D scanning[J]. Journal of Machine Design, 2021, 38(9): 71-74. | |
| 5 | 王鑫龙,孙文磊,张建杰,等. 基于点云数据的逆向工程技术研究综述[J]. 制造技术与机床, 2018(2): 49-53. 10.19287/j.cnki.1005-2402.2018.02.010 |
| WANG X L, SUN W L, ZHANG J J, et al. Review on reverse engineering research based on point cloud data[J]. Manufacturing Technology and Machine Tool, 2018(2): 49-53. 10.19287/j.cnki.1005-2402.2018.02.010 | |
| 6 | 董亚涵,李永强,李鹏鹏,等. 基于改进凸包算法的树冠轮廓点提取与体积计算[J]. 测绘工程, 2018, 27(8): 66-71. 10.19349/j.cnki.issn1006-7949.2018.08.012 |
| DONG Y H, LI Y Q, LI P P, et al. Tree crown outline points extracting and volume calculation based on improved convex hull algorithm[J]. Engineering of Surveying and Mapping, 2018, 27(8): 66-71. 10.19349/j.cnki.issn1006-7949.2018.08.012 | |
| 7 | 陈琛,李宝顺,包亚萍. 基于光栅投影和点云体积计算的过度包装检测系统[J]. 计算机测量与控制, 2014, 22(12): 3919-3922. 10.3969/j.issn.1671-4598.2014.12.024 |
| CHEN C, LI B S, BAO Y P. Excessive packaging detection system based on point set volume calculation method and grating projection[J]. Computer Measurement and Control, 2014, 22(12): 3919-3922. 10.3969/j.issn.1671-4598.2014.12.024 | |
| 8 | 吕小宁,刘晓丽,段云岭,等. 地下能源储库群容积激光测量方法及现场实验[J]. 中国激光, 2016, 43(10): No.1004002. 10.3788/cjl201643.1004002 |
| LYU X N, LIU X L, DUAN Y L, et al. Laser measurement method and in-situ experiment of underground energy storage caverns volume[J]. Chinese Journal of Lasers, 2016, 43(10): No.1004002. 10.3788/cjl201643.1004002 | |
| 9 | 张吉星,程效军,程小龙. 三维激光扫描技术在船舶排水量计量中的应用[J]. 中国激光, 2016, 43(12): No.1204003. 10.3788/cjl201643.1204003 |
| ZHANG J X, CHENG X J, CHENG X L. Application of three-dimensional laser scanning technology in measurement of ship displacement[J]. Chinese Journal of Lasers, 2016, 43(12): No.1204003. 10.3788/cjl201643.1204003 | |
| 10 | LU T, CHEN F W. Multiwfn: a multifunctional wavefunction analyzer[J]. Journal of Computational Chemistry, 2012, 33(5): 580-592. 10.1002/jcc.22885 |
| 11 | LU T, CHEN F. Quantitative analysis of molecular surface based on improved Marching Tetrahedra algorithm[J]. Journal of Molecular Graphics and Modelling, 2012, 38: 314-323. 10.1016/j.jmgm.2012.07.004 |
| 12 | 连强强,顾敏. 基于α-shape的三维激光点云计算树冠体积的研究[J]. 青海大学学报, 2020, 38(5): 74-79. 10.13901/j.cnki.qhwxxbzk.2020.05.011 |
| LIAN Q Q, GU M. Research on the calculation of tree crown volume by 3D laser point cloud based on α-shape[J]. Journal of Qinghai University, 2020, 38(5): 74-79. 10.13901/j.cnki.qhwxxbzk.2020.05.011 | |
| 13 | 付敬帅,李斌. 基于点云截面数据点的多轮廓排序算法[J]. 河南科学, 2019, 37(6): 933-937. 10.3969/j.issn.1004-3918.2019.06.012 |
| FU J S, LI B. Multi-contour sorting algorithm based on point cloud cross-section data points[J]. Henan Science, 2019, 37(6): 933-937. 10.3969/j.issn.1004-3918.2019.06.012 | |
| 14 | 程效军,熊鑫鑫,杨泽鑫,等. 基于地面激光雷达的洞库容量计量[J]. 激光与光电子学进展, 2019, 56(23): No.231201. 10.3788/lop56.231201 |
| CHENG X J, XIONG X X, YANG Z X, et al. Cavern capacity calculation using terrestrial lidar[J]. Laser and Optoelectronics Progress, 2019, 56(23): No.231201. 10.3788/lop56.231201 | |
| 15 | 钱锦锋,陈志杨,张三元,等. 点云数据压缩中的边界特征检测[J]. 中国图象图形学报, 2005, 10(2): 164-169. 10.11834/jig.20050232 |
| QIAN J F, CHEN Z Y, ZHANG S Y, et al. The detection of boundary point of point cloud compression[J]. Journal of Image and Graphics, 2005, 10(2): 164-l69. 10.11834/jig.20050232 | |
| 16 | JAIN A K. Data clustering: 50 years beyond K-means[J]. Pattern Recognition Letters, 2010, 31(8): 65l-666. 10.1016/j.patrec.2009.09.011 |
| 17 | NG A Y, JORDAN M I, WEISS Y. On spectral clustering analysis and an algorithm[C]// Proceedings of the 14th International Conference on Neural Information Processing Systems: Natural and Synthetic. Cambridge: MIT Press, 2001 :849-856. |
| 18 | 程效军,方芳. 基于形态学的散乱点云轮廓特征线提取[J]. 同济大学学报(自然科学版), 2014, 42(11): 1738-1743. 10.11908/j.issn.0253-374x.2014.11.018 |
| CHENG X J, FANG F. Morphology-based scattered point cloud contour extraction[J]. Journal of Tongji University (Natural Science), 2014, 42(11): 1738-1743. 10.11908/j.issn.0253-374x.2014.11.018 | |
| 19 | 刘金锦,李浩军. 基于点云切片改进法的不规则物体体积测量[J]. 光学学报, 2021, 41(23): No.2312003. 10.3788/AOS202141.2312003 |
| LIU J J, LI H J. Volume measurement of irregular objects based on improved point cloud slicing method[J]. Acta Optica Sinica, 2021, 41(23): No.2312003. 10.3788/AOS202141.2312003 | |
| 20 | HAINES E. Point in polygon strategies[M]// HECKBERT P S. Graphics Gems IV. San Diego, CA: Academic Press, 1994: 24-46. 10.1016/b978-0-12-336156-1.50013-6 |
| 21 | LORENSEN W E, CLINE H E. Marching cubes: a high resolution 3D surface construction algorithm[J]. ACM SIGGRAPH Computer Graphics, 1987, 21(4):163-169. 10.1145/37402.37422 |
| 22 | LIU K, RAN X, GONG J, et al. Extending epipolar geometry for real-time structured light illumination Ⅱ: lossless accuracy[J]. Optics Letters, 2021, 46(4): 837-840. 10.1364/ol.415858 |
| 23 | JIA M, YANG X, LIU K. Automatically detecting rigidly and nonrigidly deformed facial landmarks from coarseness to fineness[J]. Journal of Electronic Imaging, 2019, 28(6): No.063009. 10.1117/1.jei.28.6.063009 |
| 24 | ZHANG G, XU B, LAU D L, et al. Correcting projector lens distortion in real time with a scale-offset model for structured light illumination[J]. Optics Express, 2022, 30(14): 24507-24522. 10.1364/oe.462120 |
| 25 | 柯映林,王青. 反求工程中的点云切片算法研究[J]. 计算机辅助设计与图形学学报, 2005, 17(8): 1798-1802. 10.3321/j.issn:1003-9775.2005.08.024 |
| KE Y L, WANG Q. Research on point cloud slicing technique in reverse engineering[J]. Journal of Computer-Aided Design and Computer Graphics, 2005, 17(8): 1798-1802. 10.3321/j.issn:1003-9775.2005.08.024 |
| [1] | . YOLOv5s-MRD: an efficient fire and smoke detection algorithm for complex scenarios based on YOLOv5s [J]. Journal of Computer Applications, 0, (): 0-0. |
| [2] | Qiye ZHANG, Xinrui ZENG. Efficient active-set method for support vector data description problem with Gaussian kernel [J]. Journal of Computer Applications, 2024, 44(12): 3808-3814. |
| [3] | . Path planning of multi-UAV formation based on improved artificial potential field method [J]. Journal of Computer Applications, 0, (): 0-0. |
| [4] | . Dual-population dual-stage evolutionary algorithm for complex constrained multi-objective optimization problems [J]. Journal of Computer Applications, 0, (): 0-0. |
| [5] | Qin LENG, Zhengyuan MAO. Two echelon location-routing optimization considering facility sizing decision [J]. Journal of Computer Applications, 2024, 44(11): 3513-3520. |
| [6] | Qingyuan PENG, Xiaofeng WANG, Junxia WANG, Yingying HUA, Ao TANG, Fei HE. Review of phase transition in satisfiability problems [J]. Journal of Computer Applications, 2024, 44(11): 3503-3512. |
| [7] | Renke SUN, Zhiyu HUANGFU, Hu CHEN, Zhongnian LI, Xinzheng XU. Survey of neural architecture search [J]. Journal of Computer Applications, 2024, 44(10): 2983-2994. |
| [8] | Antai SUN, Ye LIU, Dongmei XU. Dynamic surface asymptotic compensation algorithm for multi-agent systems [J]. Journal of Computer Applications, 2024, 44(10): 3151-3157. |
| [9] | Chaoying YAN, Ziyi ZHANG, Yingnan QU, Qiuyu LI, Dixiang ZHENG, Lijun SUN. Double auction carbon trading based on consortium blockchain [J]. Journal of Computer Applications, 2024, 44(10): 3240-3245. |
| [10] | . Dung beetle optimizer algorithm with restricted reverse learning and Cauchy-Gauss variation [J]. Journal of Computer Applications, 0, (): 0-0. |
| [11] | Guanglei YAO, Juxia XIONG, Guowu YANG. Flower pollination algorithm based on neural network optimization [J]. Journal of Computer Applications, 2024, 44(9): 2829-2837. |
| [12] | Shanglong LI, Jianhua LIU, Heming JIA. Reptile search algorithm based on multi-hunting coordination strategy [J]. Journal of Computer Applications, 2024, 44(9): 2818-2828. |
| [13] | Yan LI, Dazhi PAN, Siqing ZHENG. Improved adaptive large neighborhood search algorithm for multi-depot vehicle routing problem with time window [J]. Journal of Computer Applications, 2024, 44(6): 1897-1904. |
| [14] | . Robust shapeles representation method for time series [J]. Journal of Computer Applications, 0, (): 0-0. |
| [15] | HU Linbo , NI Zhiwei , CHENG Jiale, LIU Wentao , ZHU Xuhui , . Complex collaborative crowdsourcing task allocation method based on fusion community detection [J]. Journal of Computer Applications, 0, (): 0-0. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||