


Journal of Computer Applications ›› 2025, Vol. 45 ›› Issue (10): 3270-3276.DOI: 10.11772/j.issn.1001-9081.2024101534
• Advanced computing • Previous Articles
Yu WANG( ), Mingyue ZHAO, Xiaolin ZHOU
), Mingyue ZHAO, Xiaolin ZHOU
Received:2024-10-31
Revised:2024-12-27
Accepted:2024-12-30
Online:2025-03-07
Published:2025-10-10
Contact:
Yu WANG
About author:WANG Yu, born in 1980, Ph. D., associate professor. Her research interests include machine learning, intelligent decision-making.Supported by:
王昱(), 赵明月, 周小琳
通讯作者:
王昱
作者简介:王昱(1980—),女,辽宁沈阳人,副教授,博士,主要研究方向:机器学习、智能决策 Email:wangyu@sau.edu.cn基金资助:CLC Number:
Yu WANG, Mingyue ZHAO, Xiaolin ZHOU. Task-based assistive robot path planning in nursing home scenarios[J]. Journal of Computer Applications, 2025, 45(10): 3270-3276.
王昱, 赵明月, 周小琳. 养老院场景下基于任务的辅助机器人路径规划[J]. 《计算机应用》唯一官方网站, 2025, 45(10): 3270-3276.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2024101534
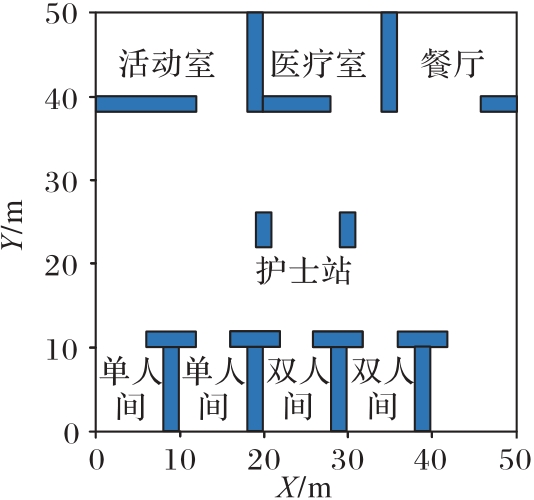
Fig. 1 Simulation map of nursing home environment
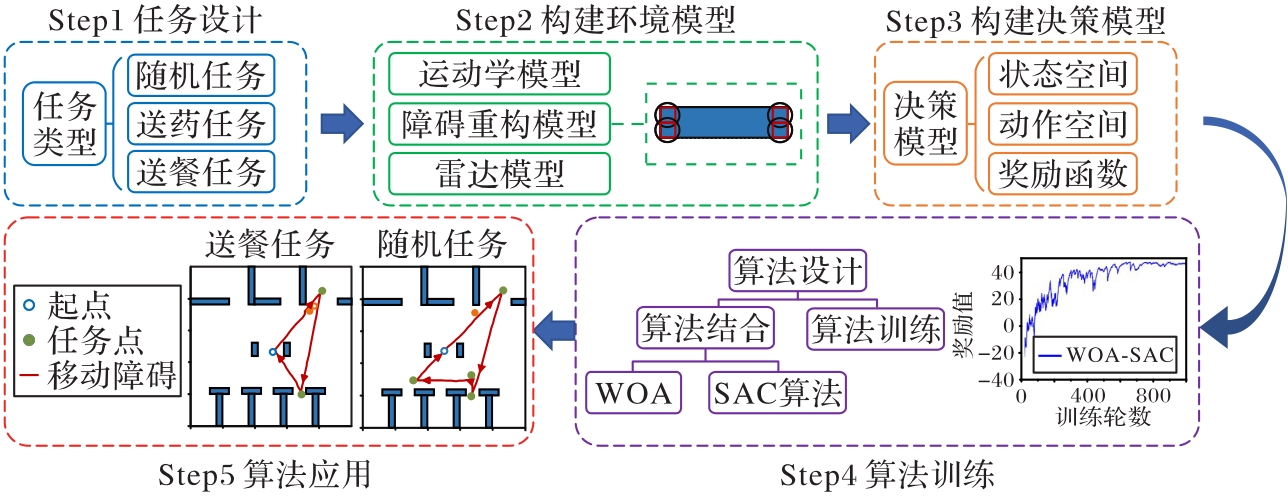
Fig. 2 Multi-task autonomous path planning decision-making system
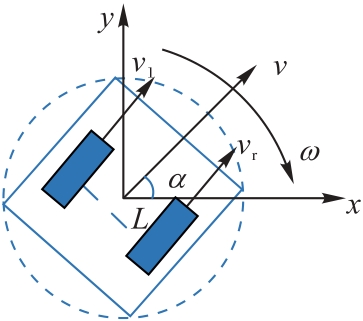
Fig. 3 Kinematic model
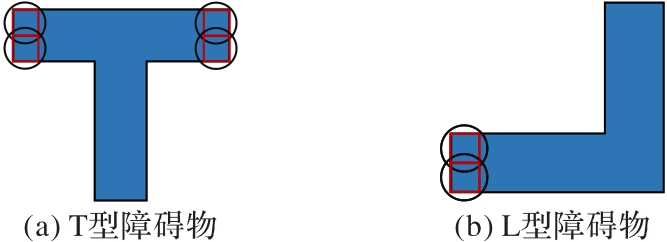
Fig. 4 Obstacle contour reconstruction based on virtual circles
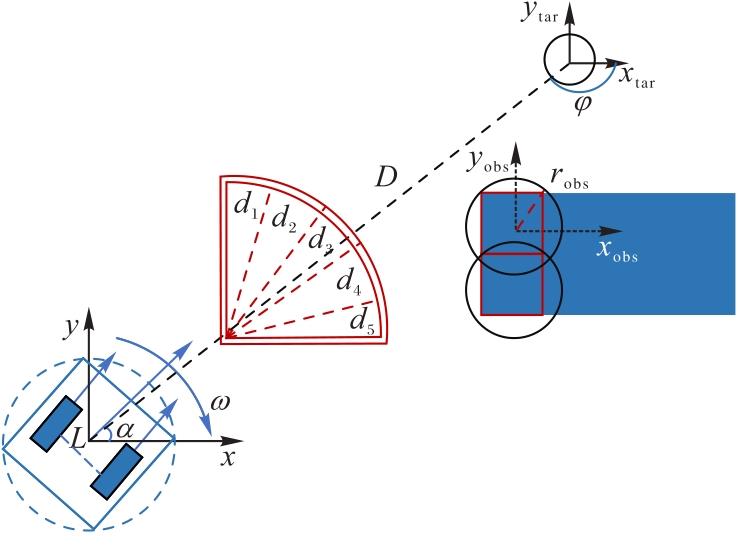
Fig. 5 Radar model
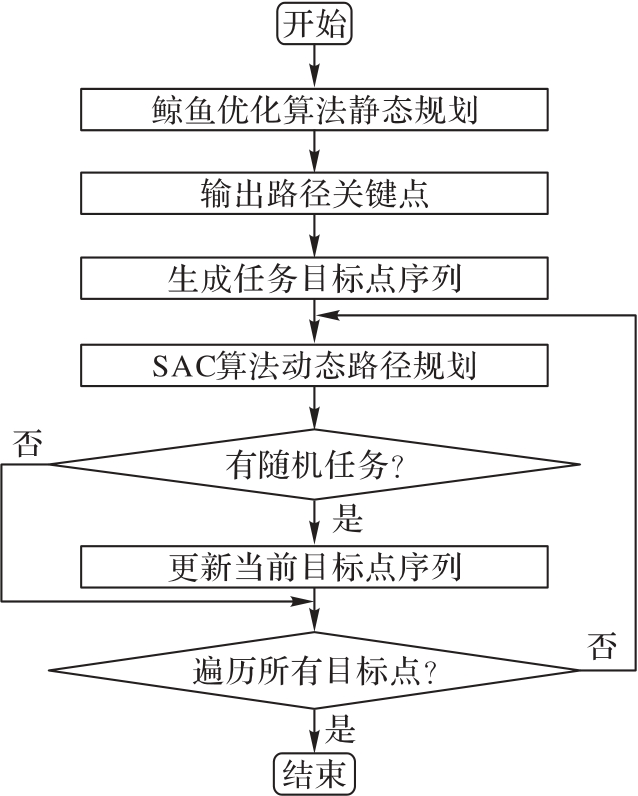
Fig. 6 Flow of proposed algorithm
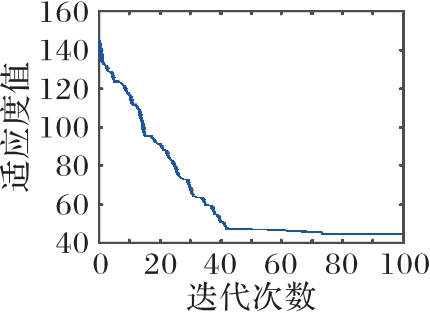
Fig. 7 Fitness value of WOA
| 参数名 | 符号 | 值 | 参数名 | 符号 | 值 |
|---|---|---|---|---|---|
| 经验池大小 | M | 65 536 | 软更新学习率 | τ | 0.01 |
| 训练批次大小 | N | 64 | 最大训练次数 | E | 1 000 |
| Actor网络训练率 | la | 3×10-4 | 加权系数 | λ1,λ2 | 0.5 |
| Critic网络训练率 | lc | 3×10-4 | 机器人步数 | T | 500 |
| 奖励折扣率 | γ | 0.9 |
Tab. 1 Hyperparameter details
| 参数名 | 符号 | 值 | 参数名 | 符号 | 值 |
|---|---|---|---|---|---|
| 经验池大小 | M | 65 536 | 软更新学习率 | τ | 0.01 |
| 训练批次大小 | N | 64 | 最大训练次数 | E | 1 000 |
| Actor网络训练率 | la | 3×10-4 | 加权系数 | λ1,λ2 | 0.5 |
| Critic网络训练率 | lc | 3×10-4 | 机器人步数 | T | 500 |
| 奖励折扣率 | γ | 0.9 |
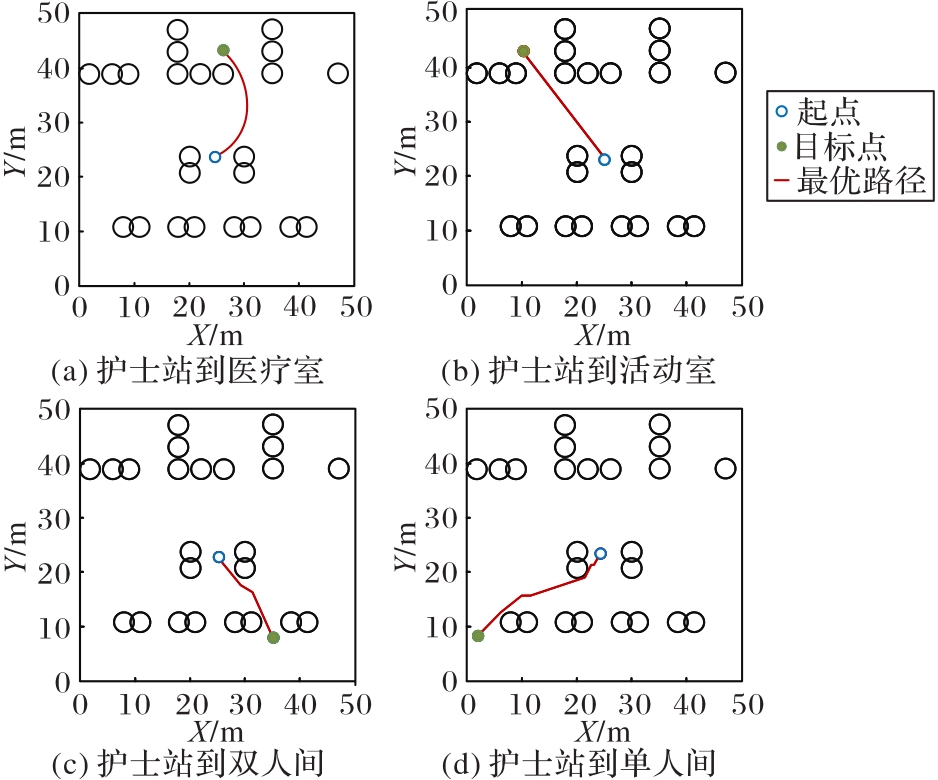
Fig. 8 Robot path planning results of WOA
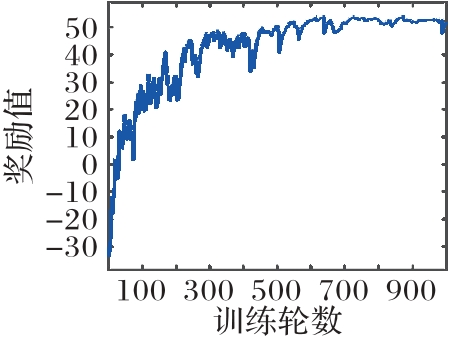
Fig. 9 Model training curve
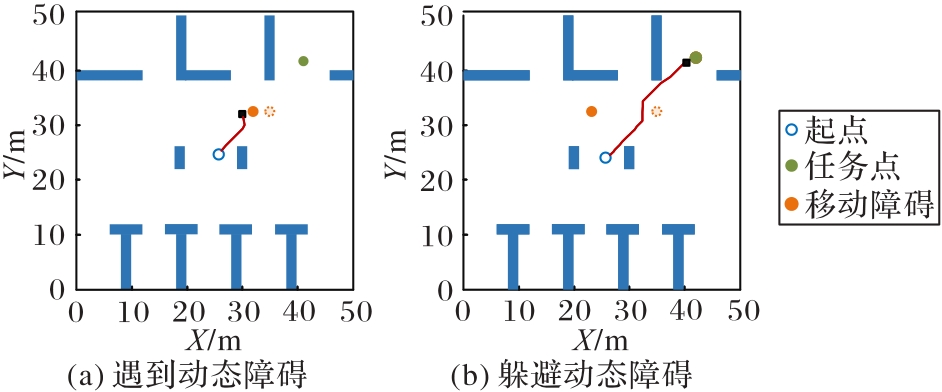
Fig. 10 Avoiding dynamic obstacles during tasks
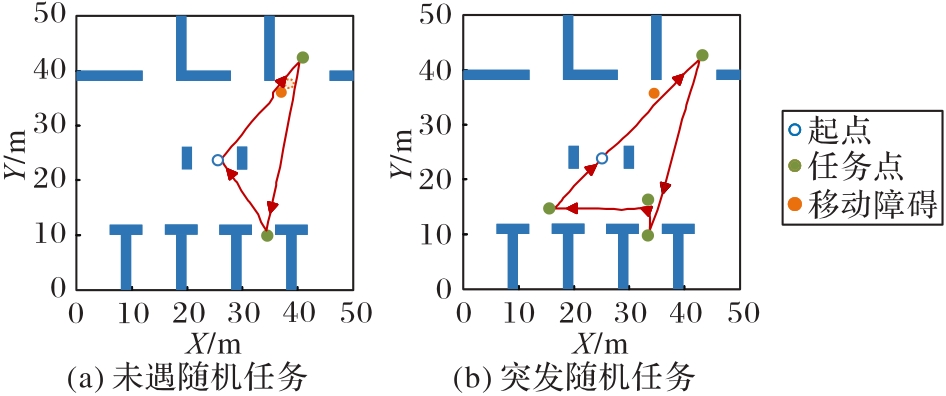
Fig. 11 Multi-task path planning
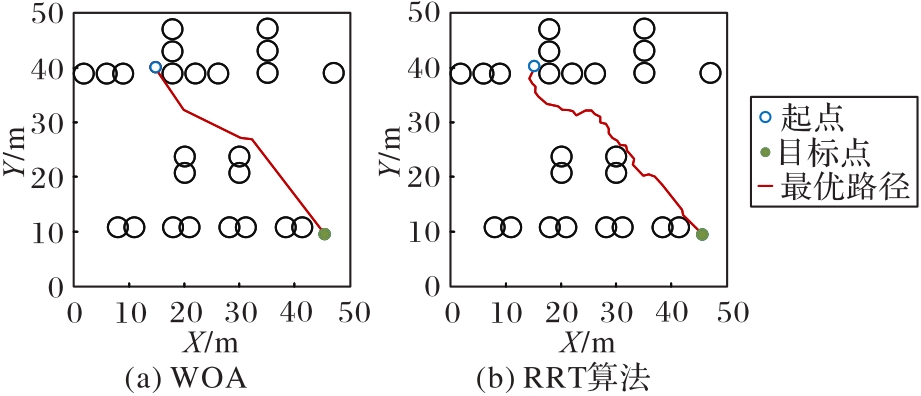
Fig. 12 Comparison of path planning results of two algorithms in static environment
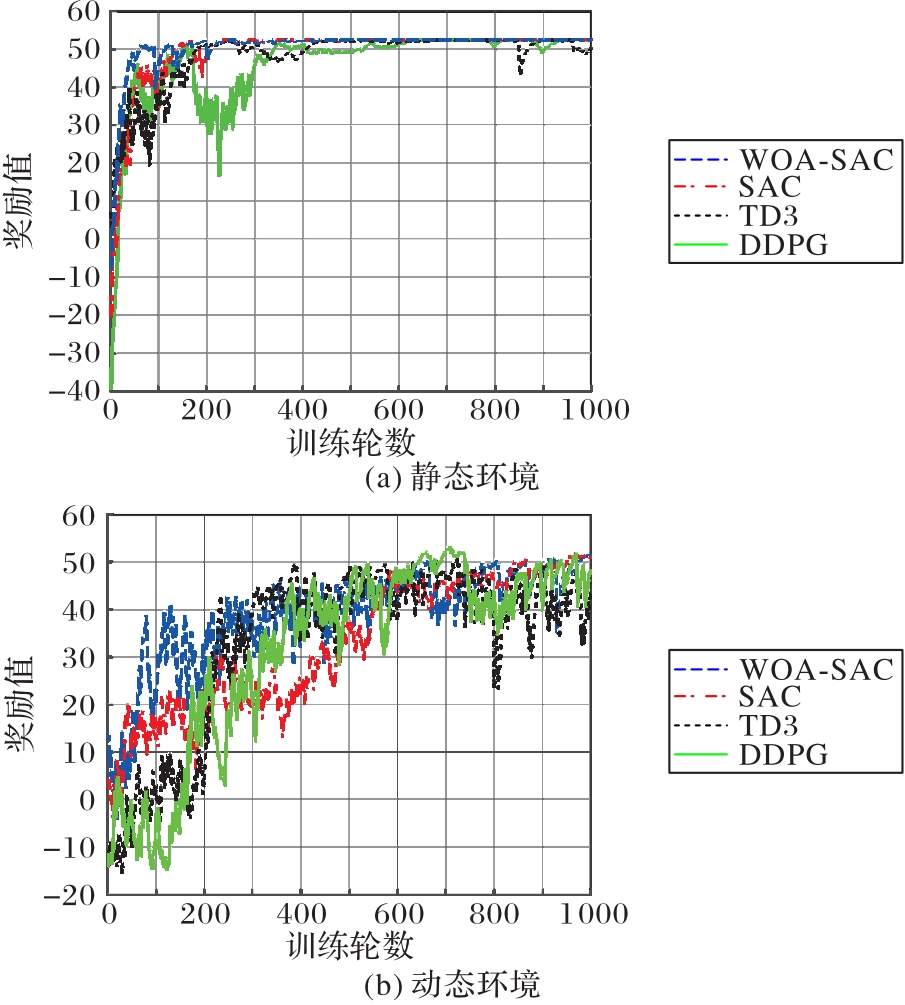
Fig. 13 Comparison of reward changes of four algorithms in static and dynamic environments
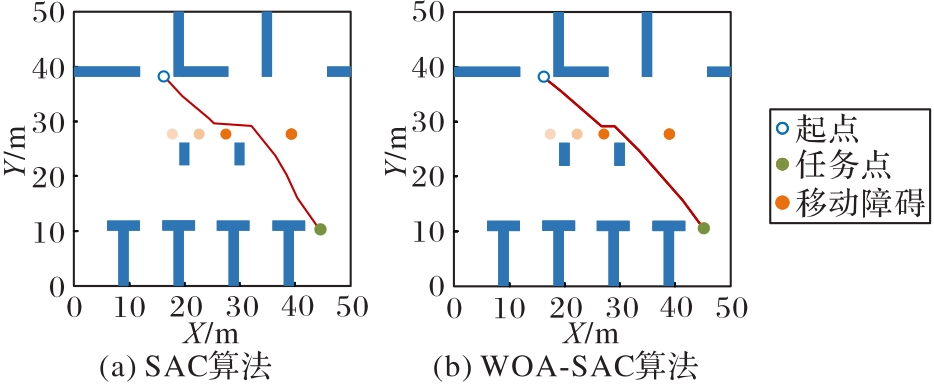
Fig. 14 Comparison of path planning results of two algorithms in dynamic environment
| 算法 | 平均路径长度/m | 成功率 | 平均步长 |
|---|---|---|---|
| SAC | 48 | 0.75 | 270 |
| WOA-SAC | 43 | 0.80 | 190 |
Tab. 2 Performance comparison between SAC and WOA-SAC
| 算法 | 平均路径长度/m | 成功率 | 平均步长 |
|---|---|---|---|
| SAC | 48 | 0.75 | 270 |
| WOA-SAC | 43 | 0.80 | 190 |
| [1] | LAI X, LI J, CHAMBERS J. Enhanced center constraint weighted A* algorithm for path planning of petrochemical inspection robot[J]. Journal of Intelligent and Robotic Systems, 2021, 102(4): No.78. |
| [2] | JIANG Q, MAN Y, PU X. Improved path planning algorithm based on RRT[C]// Proceedings of the 2nd International Conference on Signal Processing and Intelligent Computing. Piscataway: IEEE, 2024: 463-466. |
| [3] | FU S. Robot path planning optimization based on RRT and APF fusion algorithm[C]// Proceedings of the 8th International Conference on Robotics and Automation Sciences. Piscataway: IEEE, 2024: 32-36. |
| [4] | FAN J, CHEN X, LIANG X. UAV trajectory planning based on bi-directional APF-RRT* algorithm with goal-biased[J]. Expert Systems with Applications, 2023, 213(Pt C): No.119137. |
| [5] | LAN W, JIN X, WANG T, et al. Improved RRT algorithms to solve path planning of multi-glider in time-varying ocean currents[J]. IEEE Access, 2021, 9: 158098-158115. |
| [6] | YAN Z, ZHAO L, WANG Y, et al. Path planning of AUV for obstacle avoidance with improved artificial potential field[C]// Proceedings of the 49th Annual Conference of the IEEE Industrial Electronics Society. Piscataway: IEEE, 2023: 1-5. |
| [7] | LI W, CHEN Y, XIANG L. Cooperative path planning of UAV formation based on improved artificial potential field[C]// Proceedings of the IEEE 2nd International Conference on Electronic Technology, Communication and Information. Piscataway: IEEE, 2022: 636-641. |
| [8] | HAMILTON J, STEFANAKOS I, CALINESCU R, et al. Towards adaptive planning of assistive-care robot tasks[EB/OL]. [2024-08-22].. |
| [9] | 李少波,宋启松,李志昂,等. 遗传算法在机器人路径规划中的研究综述[J].科学技术与工程, 2020, 20(2): 423-431. |
| LI S B, SONG Q S, LI Z A, et al. Review of genetic algorithm in robot path planning[J]. Science Technology and Engineering, 2020, 20(2): 423-431. | |
| [10] | 冯豪博,胡桥,赵振轶. 基于精英族系遗传算法的AUV集群路径规划[J]. 系统工程与电子技术, 2022, 44(7):2251-2262. |
| FENG H B, HU Q, ZHAO Z Y. AUV swarm path planning based on elite lineage genetic algorithm[J]. Systems Engineering and Electronics, 2022, 44(7): 2251-2262. | |
| [11] | 韩统,崔明朗,张伟,等. 多无人机协同空战机动决策[J]. 兵器装备工程学报, 2020, 41(4): 117-123. |
| HAN T, CUI M L, ZHANG W, et al. Multi-UCAV cooperative air combat maneuvering decision[J]. Journal of Ordnance Equipment Engineering, 2020, 41(4): 117-123. | |
| [12] | 吕柏行,郭志光,赵韦皓,等. 标准粒子群算法的优化方式综述[J]. 科学技术创新, 2021(28): 33-37. |
| LYU B X, GUO Z G, ZHAO W H, et al. A review on optimization methods of standard particle swarm optimization[J]. Scientific and Technological Innovation, 2021(28): 33-37. | |
| [13] | ZHAO J, ZHU X, SONG T. Serial manipulator time-jerk optimal trajectory planning based on hybrid IWOA-PSO algorithm[J]. IEEE Access, 2022, 10: 6592-6604. |
| [14] | KATHEN M J T, SAMANIEGIO F P, FLORES I J, et al. AquaHet-PSO: an informative path planner for a fleet of autonomous surface vehicles with heterogeneous sensing capabilities based on multi-objective PSO[J]. IEEE Access, 2023, 11: 110943-110966. |
| [15] | YU J, HOU J, CHEN G. Improved safety-first A-star algorithm for autonomous vehicles[C]// Proceedings of the 5th International Conference on Advanced Robotics and Mechatronics. Piscataway: IEEE, 2020: 706-710. |
| [16] | CHEN Z, YU J, ZHAO Z, et al. A path-planning method considering environmental disturbance based on VPF-RRT[J]. Drones, 2023, 7(2): No.145. |
| [17] | QU H, XING K, ALEXANDER T. An improved genetic algorithm with co-evolutionary strategy for global path planning of multiple mobile robots[J]. Neurocomputing, 2013, 120: 509-517. |
| [18] | 张荣霞,武长旭,孙同超,等. 深度强化学习及在路径规划中的研究进展[J]. 计算机工程与应用, 2021, 57(19): 44-56. |
| ZHANG R X, WU C X, SUN T C, et al. Progress on deep reinforcement learning in path planning[J]. Computer Engineering and Applications, 2021, 57(19): 44-56. | |
| [19] | ZHOU S, LIU X, XU Y, et al. A Deep Q-Network (DQN) based path planning method for mobile robots[C]// Proceedings of the 2018 IEEE International Conference on Information and Automation. Piscataway: IEEE, 2018: 366-371. |
| [20] | DONG Y, ZOU X. Mobile robot path planning based on improved DDPG reinforcement learning algorithm[C]// Proceedings of the IEEE 11th International Conference on Software Engineering and Service Science. Piscataway: IEEE, 2020: 52-56. |
| [21] | DE JESUS J C, KICH V A, KOLLING A H, et al. Soft actor-critic for navigation of mobile robots[J]. Journal of Intelligent and Robotic Systems, 2021, 102(2): No.31. |
| [22] | 赵俊涛,罗小川,刘俊秘. 改进鲸鱼优化算法在机器人路径规划中的应用[J]. 东北大学学报(自然科学版), 2023, 44(8): 1065-1071. |
| ZHAO J T, LUO X C, LIU J M. Application of improved whale optimization algorithm in robot path planning[J]. Journal of Northeastern University (Natural Science), 2023, 44(8): 1065-1071. | |
| [23] | CUI Z, GUAN W, ZHANG X, et al. Autonomous collision avoidance decision-making method for USV based on ATL-TD3 algorithm[J]. Ocean Engineering, 2024, 312(Pt 3): No.119297. |
| [1] | Tianyu XUE, Aiping LI, Liguo DUAN. Vehicular edge computing scheme with task offloading and resource optimization [J]. Journal of Computer Applications, 2025, 45(6): 1766-1775. |
| [2] | Pengcheng XU, Lei HE, Chuan LI, Weiqi QIAN, Tun ZHAO. Deep symbolic regression method based on Transformer [J]. Journal of Computer Applications, 2025, 45(5): 1455-1463. |
| [3] | Xingwang WANG, Qingyang ZHANG, Shouyong JIANG, Yongquan DONG. Dynamic UAV path planning based on modified whale optimization algorithm [J]. Journal of Computer Applications, 2025, 45(3): 928-936. |
| [4] | Jing WANG, Xuming FANG. Intelligent joint power and channel allocation algorithm for Wi-Fi7 multi-link integrated communication and sensing [J]. Journal of Computer Applications, 2025, 45(2): 563-570. |
| [5] | Huahua WANG, Liang HUANG, Jiajie CHEN, Jiening FANG. Dynamic allocation algorithm for multi-beam subcarriers of low orbit satellites based on deep reinforcement learning [J]. Journal of Computer Applications, 2025, 45(2): 571-577. |
| [6] | Zijun MIAO, Fei LUO, Weichao DING, Wenbo DONG. Traffic signal control algorithm based on overall state prediction and fair experience replay [J]. Journal of Computer Applications, 2025, 45(1): 337-344. |
| [7] | Hailin XIAO, Tianyi HUANG, Qiuxiang DAI, Yuejun ZHANG, Zhongshan ZHANG. Safe reinforcement learning method for decision making of autonomous lane changing based on trajectory prediction [J]. Journal of Computer Applications, 2024, 44(9): 2958-2963. |
| [8] | Haodong HE, Hao FU, Qiang WANG, Shuai ZHOU, Wei LIU. Multi-robot path following and formation based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(8): 2626-2633. |
| [9] | Yi ZHOU, Hua GAO, Yongshen TIAN. Proximal policy optimization algorithm based on clipping optimization and policy guidance [J]. Journal of Computer Applications, 2024, 44(8): 2334-2341. |
| [10] | Tian MA, Runtao XI, Jiahao LYU, Yijie ZENG, Jiayi YANG, Jiehui ZHANG. Mobile robot 3D space path planning method based on deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(7): 2055-2064. |
| [11] | Xiaoyan ZHAO, Wei HAN, Junna ZHANG, Peiyan YUAN. Collaborative offloading strategy in internet of vehicles based on asynchronous deep reinforcement learning [J]. Journal of Computer Applications, 2024, 44(5): 1501-1510. |
| [12] | Rui TANG, Chuanlin PANG, Ruizhi ZHANG, Chuan LIU, Shibo YUE. DDPG-based resource allocation in D2D communication-empowered cellular network [J]. Journal of Computer Applications, 2024, 44(5): 1562-1569. |
| [13] | Fatang CHEN, Miao HUANG, Yufeng JIN. Resource allocation algorithm for low earth orbit satellites oriented to user demand [J]. Journal of Computer Applications, 2024, 44(4): 1242-1247. |
| [14] | Xintong QIN, Zhengyu SONG, Tianwei HOU, Feiyue WANG, Xin SUN, Wei LI. Channel access and resource allocation algorithm for adaptive p-persistent mobile ad hoc network [J]. Journal of Computer Applications, 2024, 44(3): 863-868. |
| [15] | Yuanchao LI, Chongben TAO, Chen WANG. Gait control method based on maximum entropy deep reinforcement learning for biped robot [J]. Journal of Computer Applications, 2024, 44(2): 445-451. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||