


Journal of Computer Applications ›› 2026, Vol. 46 ›› Issue (5): 1534-1544.DOI: 10.11772/j.issn.1001-9081.2025050575
• Multimedia computing and computer simulation • Previous Articles
Gengxin FAN1,2,3, Huiyan HAN1,2,3( ), Liqun KUANG1,2,3, Ziyang JIN1,2,3, Huafeng ZHAO1,2,3
), Liqun KUANG1,2,3, Ziyang JIN1,2,3, Huafeng ZHAO1,2,3
Received:2025-05-27
Revised:2025-09-26
Accepted:2025-10-10
Online:2025-10-17
Published:2026-05-10
Contact:
Huiyan HAN
About author:FAN Gengxin, born in 1999, M. S. candidate. Her research interests include point cloud reconstruction.Supported by:
樊耿鑫1,2,3, 韩慧妍1,2,3(), 况立群1,2,3, 晋紫阳1,2,3, 赵华峰1,2,3
通讯作者:
韩慧妍
作者简介:樊耿鑫(1999—),女,山西运城人,硕士研究生,CCF会员,主要研究方向:点云重建基金资助:CLC Number:
Gengxin FAN, Huiyan HAN, Liqun KUANG, Ziyang JIN, Huafeng ZHAO. VU-RED-F: improved CAD model replacement for U-RED single-view point clouds[J]. Journal of Computer Applications, 2026, 46(5): 1534-1544.
樊耿鑫, 韩慧妍, 况立群, 晋紫阳, 赵华峰. VU-RED-F:改进U-RED的单视角点云CAD模型替换[J]. 《计算机应用》唯一官方网站, 2026, 46(5): 1534-1544.
Add to citation manager EndNote|Ris|BibTeX
URL: https://www.joca.cn/EN/10.11772/j.issn.1001-9081.2025050575
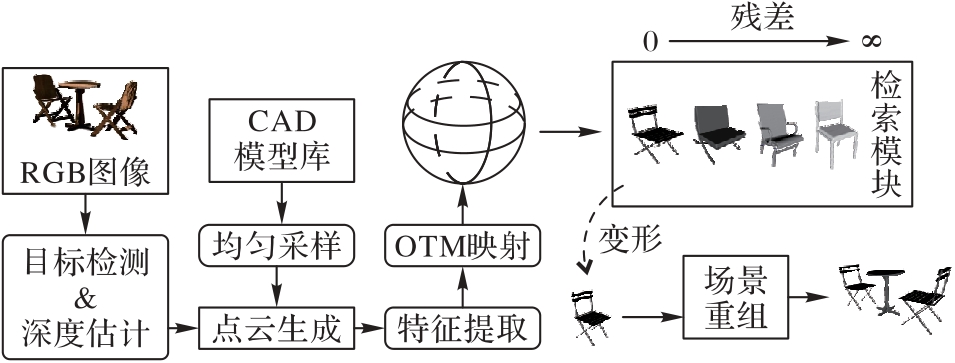
Fig. 1 Framework of U-RED algorithm
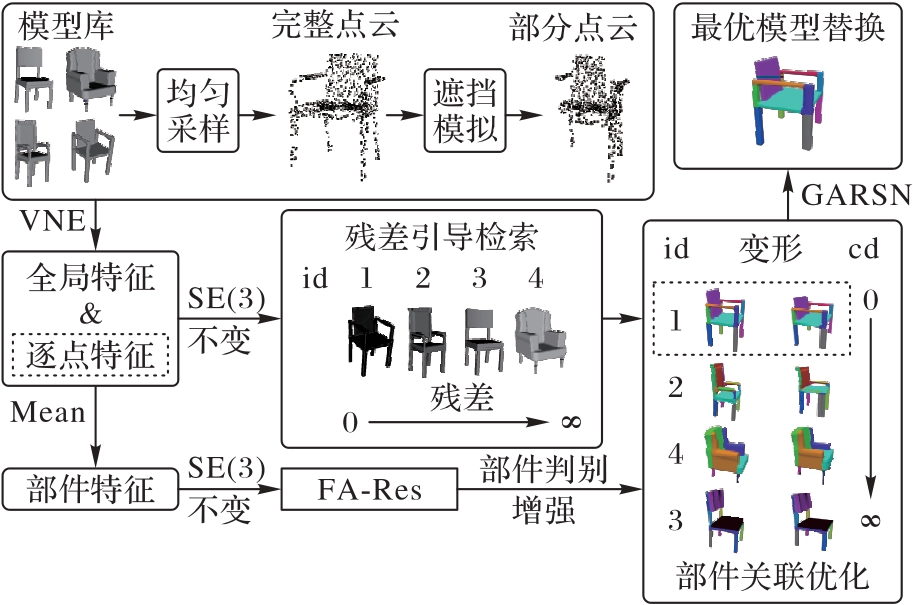
Fig. 2 Framework of VU-RED-F algorithm

Fig. 3 Structure of VNE
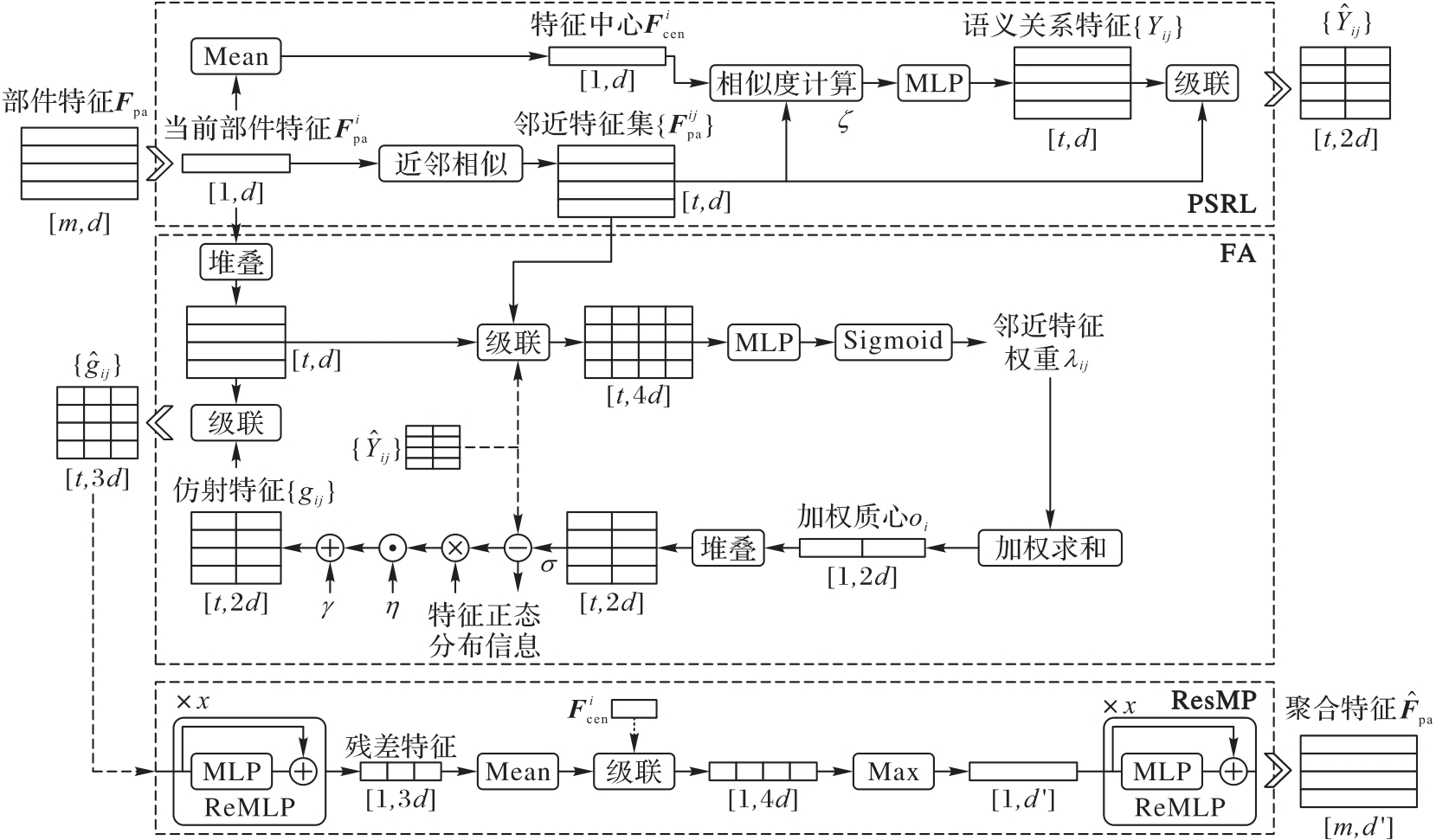
Fig. 4 Structure of FA-Res
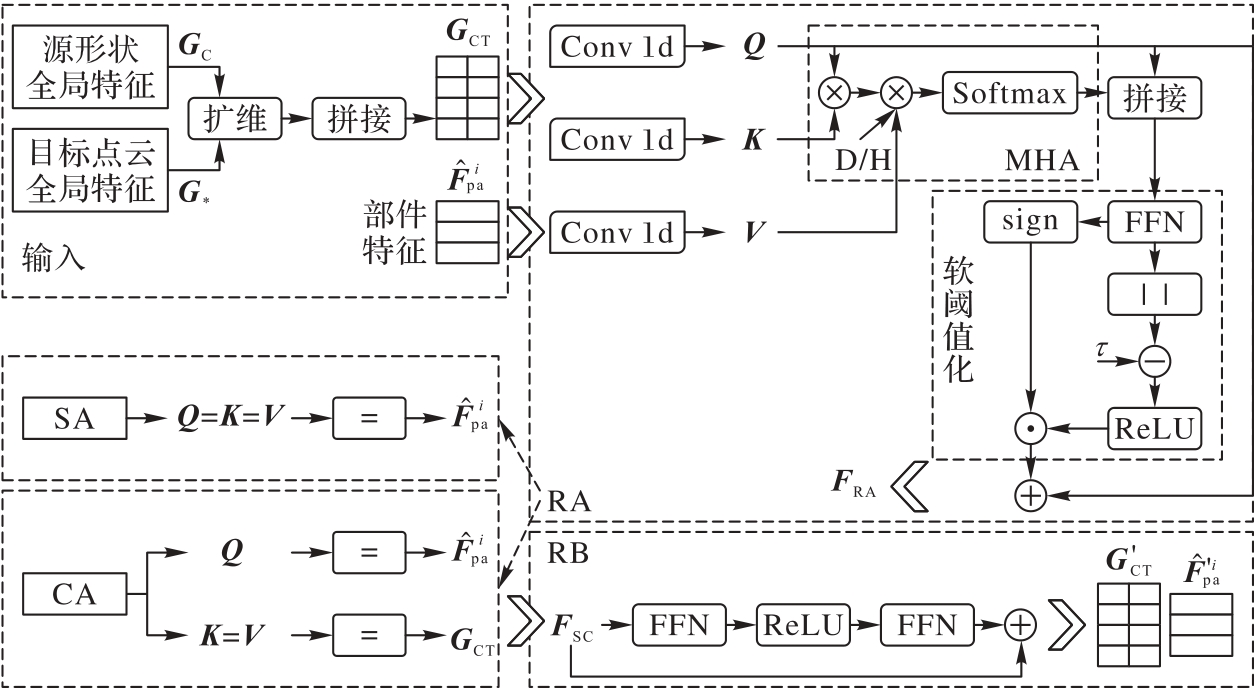
Fig. 5 Structure of GARSN
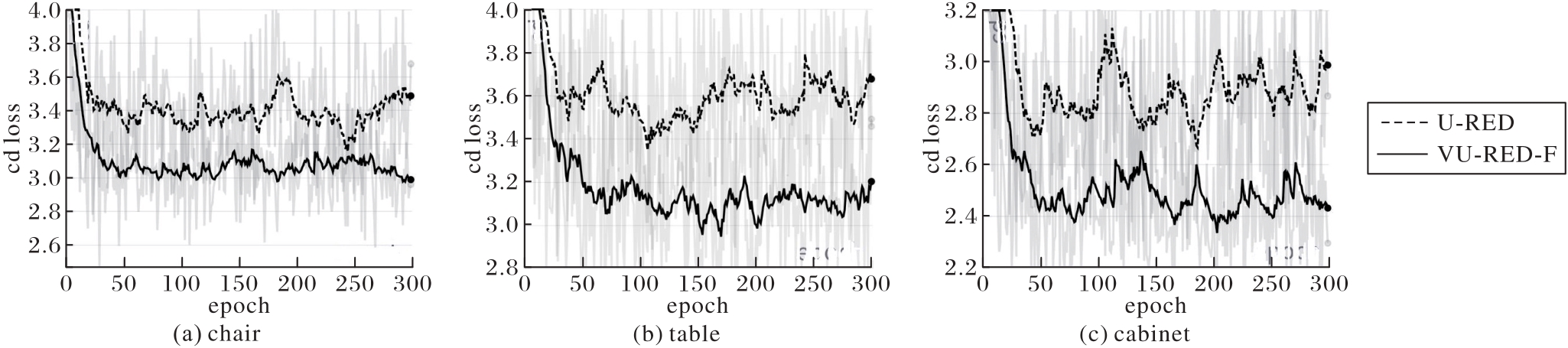
Fig. 6 Training loss curves on PartNet dataset
| 算法 | PartNet | Scan2CAD | ||||||
|---|---|---|---|---|---|---|---|---|
| chair | table | cabinet | 平均 | chair | table | cabinet | 平均 | |
| Uy[ | 2.02 | 2.32 | 2.63 | 2.22 | 3.36 | 6.65 | 7.26 | 4.90 |
| ROCA*[ | 2.50 | 2.72 | 3.86 | 2.72 | 4.24 | 14.97 | 15.92 | 9.15 |
| ROCA*[ | 3.80 | 3.87 | 2.82 | 3.76 | 6.99 | 8.10 | 13.08 | 8.10 |
| ROCA*[ | 2.53 | 3.28 | 2.49 | 2.90 | 5.15 | 7.33 | 9.72 | 6.42 |
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 | 2.89 | 3.16 | 5.95 | 3.35 |
| PT43D[ | 2.89 | 3.55 | 3.76 | 3.29 | 3.69 | 3.64 | 4.39 | 3.76 |
| DiffCAD[ | — | — | — | — | 6.40 | 7.20 | 6.90 | 6.71 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 | 2.43 | 2.62 | 4.96 | 2.80 |
Tab. 1 Comparison of cd loss for different algorithm on PartNet and Scan2CAD datasets
| 算法 | PartNet | Scan2CAD | ||||||
|---|---|---|---|---|---|---|---|---|
| chair | table | cabinet | 平均 | chair | table | cabinet | 平均 | |
| Uy[ | 2.02 | 2.32 | 2.63 | 2.22 | 3.36 | 6.65 | 7.26 | 4.90 |
| ROCA*[ | 2.50 | 2.72 | 3.86 | 2.72 | 4.24 | 14.97 | 15.92 | 9.15 |
| ROCA*[ | 3.80 | 3.87 | 2.82 | 3.76 | 6.99 | 8.10 | 13.08 | 8.10 |
| ROCA*[ | 2.53 | 3.28 | 2.49 | 2.90 | 5.15 | 7.33 | 9.72 | 6.42 |
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 | 2.89 | 3.16 | 5.95 | 3.35 |
| PT43D[ | 2.89 | 3.55 | 3.76 | 3.29 | 3.69 | 3.64 | 4.39 | 3.76 |
| DiffCAD[ | — | — | — | — | 6.40 | 7.20 | 6.90 | 6.71 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 | 2.43 | 2.62 | 4.96 | 2.80 |
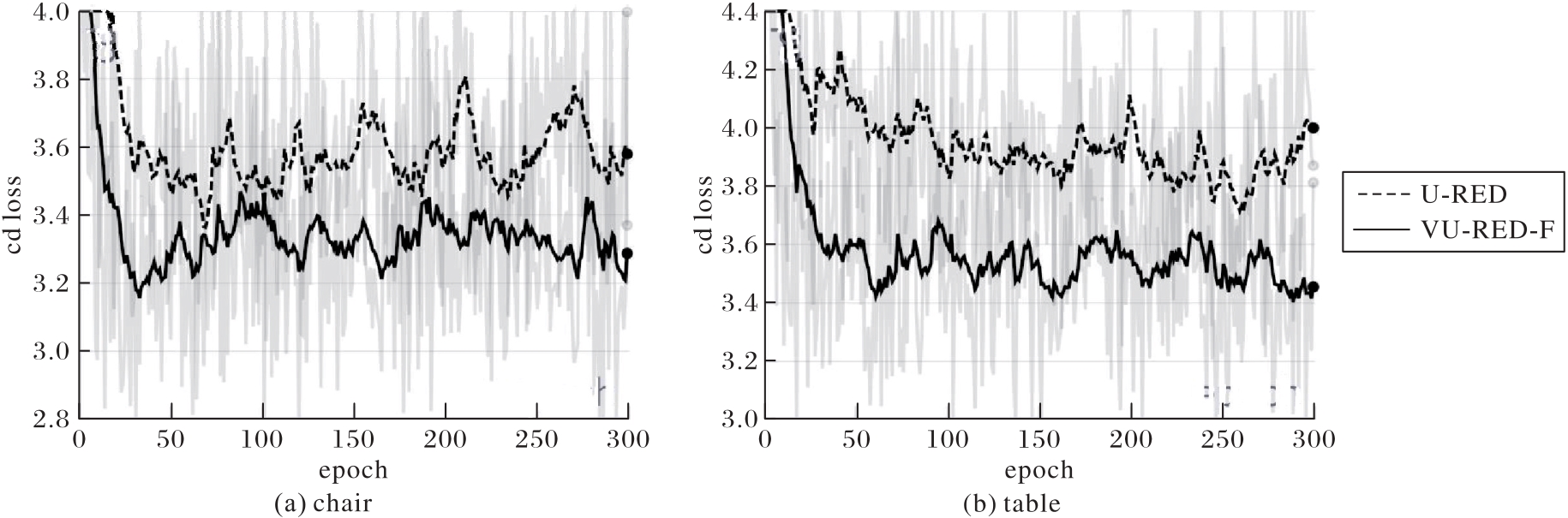
Fig. 7 Training loss curves on ComplementMe dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| Uy[ | 2.08 | 2.66 | — | 2.40 |
| U-RED[ | 1.68 | 2.26 | — | 2.00 |
| VU-RED-F | 1.37 | 1.91 | — | 1.67 |
Tab. 2 Comparison of cd loss on ComplementMe dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| Uy[ | 2.08 | 2.66 | — | 2.40 |
| U-RED[ | 1.68 | 2.26 | — | 2.00 |
| VU-RED-F | 1.37 | 1.91 | — | 1.67 |
| 算法 | Params/106 | GFLOPs | Time/s |
|---|---|---|---|
| Uy[ | 12.71 | 1.55 | 1.5 |
| ROCA*[ | 50.37 | 40.96 | 3.1 |
| ROCA*[ | 57.41 | 40.96 | 3.5 |
| ROCA*[ | 57.93 | 40.96 | 3.5 |
| U-RED[ | 17.23 | 2.96 | 4.6 |
| PT43D[ | 75.97 | 9.7 | |
| DiffCAD[ | 94.34 | 12.1 | |
| VU-RED-F | 17.76 | 2.96 | 5.1 |
Tab. 3 Computational efficiency comparison of different algorithms
| 算法 | Params/106 | GFLOPs | Time/s |
|---|---|---|---|
| Uy[ | 12.71 | 1.55 | 1.5 |
| ROCA*[ | 50.37 | 40.96 | 3.1 |
| ROCA*[ | 57.41 | 40.96 | 3.5 |
| ROCA*[ | 57.93 | 40.96 | 3.5 |
| U-RED[ | 17.23 | 2.96 | 4.6 |
| PT43D[ | 75.97 | 9.7 | |
| DiffCAD[ | 94.34 | 12.1 | |
| VU-RED-F | 17.76 | 2.96 | 5.1 |
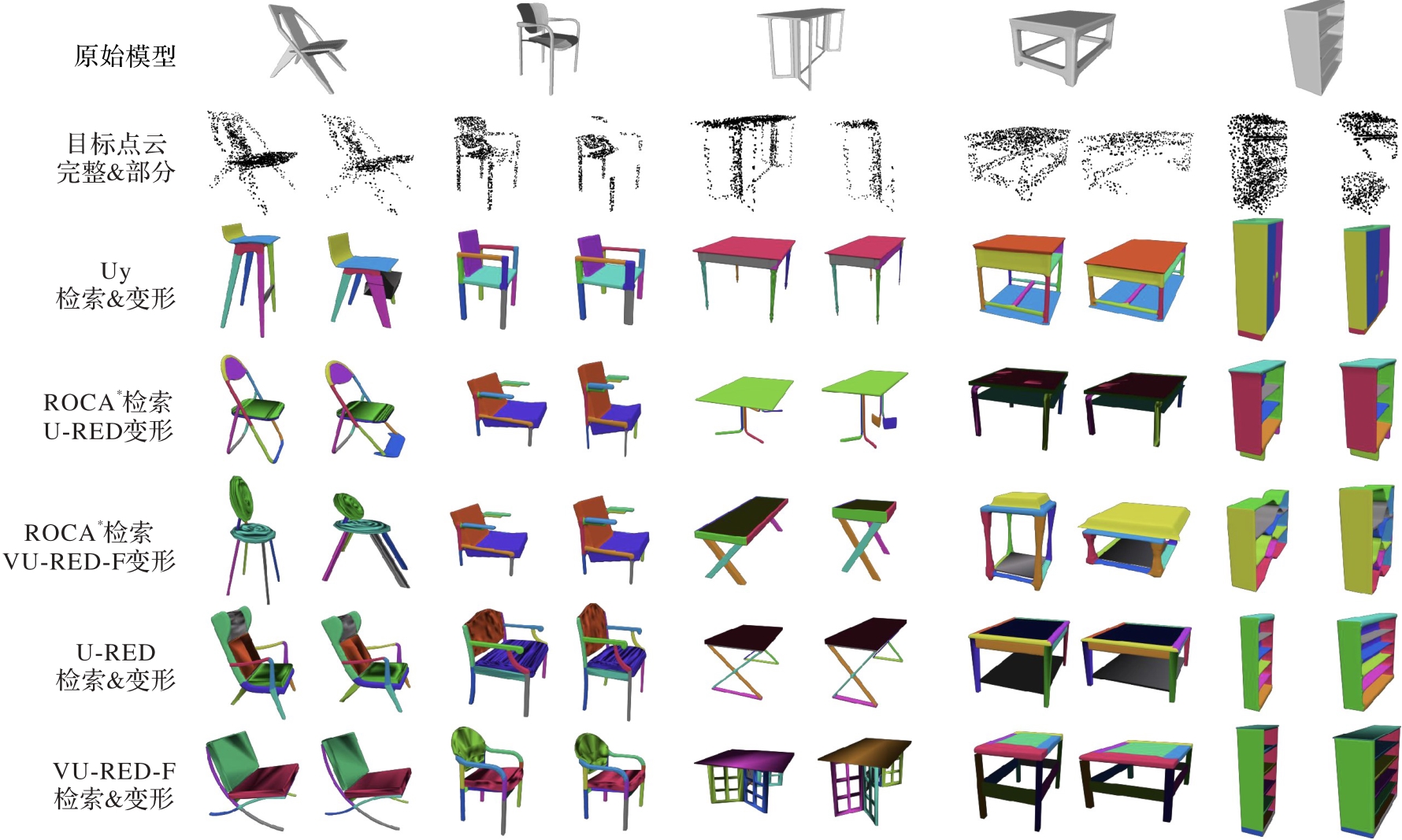
Fig. 8 Visual comparison on PartNet dataset
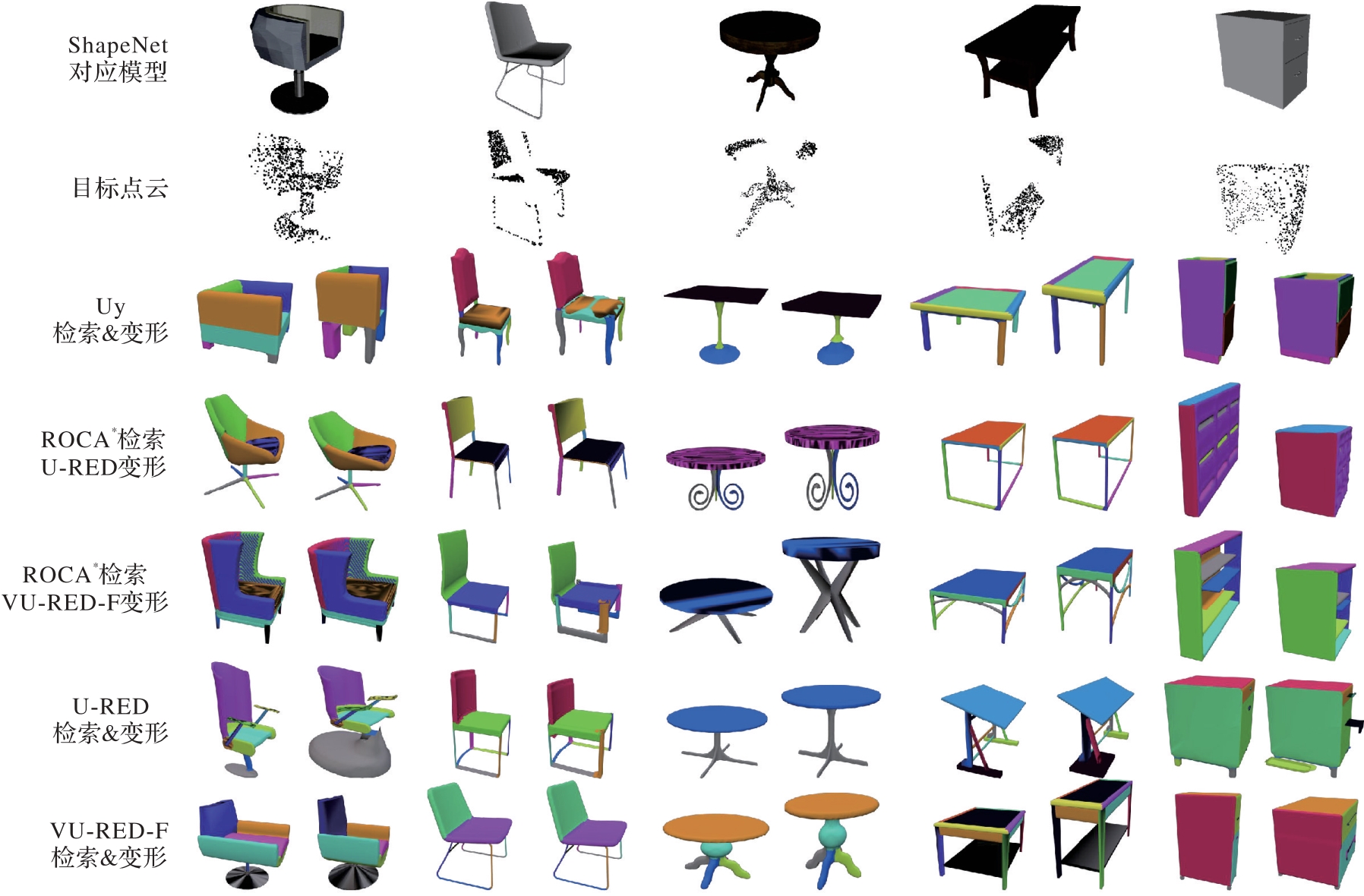
Fig. 9 Visual comparison on Scan2CAD dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| VNE | 0.88 | 1.19 | 1.18 | 1.06 |
| FA-Res | 0.91 | 1.27 | 1.15 | 1.11 |
| GARSN | 0.96 | 1.20 | 1.25 | 1.10 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
Tab. 4 Single-module test results on PartNet dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| VNE | 0.88 | 1.19 | 1.18 | 1.06 |
| FA-Res | 0.91 | 1.27 | 1.15 | 1.11 |
| GARSN | 0.96 | 1.20 | 1.25 | 1.10 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| VNE | 2.66 | 2.87 | 5.70 | 3.10 |
| FA-Res | 2.65 | 2.85 | 5.39 | 3.05 |
| GARSN | 2.73 | 2.91 | 5.62 | 3.14 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
Tab. 5 Single-module test results on Scan2CAD dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| VNE | 2.66 | 2.87 | 5.70 | 3.10 |
| FA-Res | 2.65 | 2.85 | 5.39 | 3.05 |
| GARSN | 2.73 | 2.91 | 5.62 | 3.14 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| no VNE | 0.85 | 1.13 | 1.09 | 1.01 |
| no FA-Res | 0.86 | 1.21 | 1.10 | 1.06 |
| no GARSN | 0.88 | 1.16 | 1.12 | 1.04 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
Tab. 6 Ablation test results on PartNet dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 0.95 | 1.33 | 1.30 | 1.17 |
| no VNE | 0.85 | 1.13 | 1.09 | 1.01 |
| no FA-Res | 0.86 | 1.21 | 1.10 | 1.06 |
| no GARSN | 0.88 | 1.16 | 1.12 | 1.04 |
| VU-RED-F | 0.81 | 1.10 | 1.03 | 0.97 |
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| no VNE | 2.55 | 2.79 | 5.24 | 2.96 |
| no FA-Res | 2.65 | 2.81 | 5.39 | 3.04 |
| no GARSN | 2.63 | 2.86 | 5.45 | 3.05 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
Tab. 7 Ablation test results on Scan2CAD dataset
| 算法 | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| U-RED[ | 2.89 | 3.16 | 5.95 | 3.35 |
| no VNE | 2.55 | 2.79 | 5.24 | 2.96 |
| no FA-Res | 2.65 | 2.81 | 5.39 | 3.04 |
| no GARSN | 2.63 | 2.86 | 5.45 | 3.05 |
| VU-RED-F | 2.43 | 2.62 | 4.96 | 2.80 |
| 遮挡比例/% | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| 0 | 0.75 | 1.07 | 0.99 | 0.93 |
| 25 | 0.78 | 1.08 | 1.02 | 0.95 |
| 50 | 0.81 | 1.10 | 1.03 | 0.97 |
| 75 | 0.93 | 1.54 | 1.20 | 1.26 |
Tab. 8 Obstruction test results
| 遮挡比例/% | chair | table | cabinet | 平均 |
|---|---|---|---|---|
| 0 | 0.75 | 1.07 | 0.99 | 0.93 |
| 25 | 0.78 | 1.08 | 1.02 | 0.95 |
| 50 | 0.81 | 1.10 | 1.03 | 0.97 |
| 75 | 0.93 | 1.54 | 1.20 | 1.26 |
| [1] | 邱云飞,赵静,方立. MF-Net:结合残差网络的多尺度特征点云补全网络[J]. 计算机工程与应用, 2023, 59(22): 202-212. |
| QIU Y F, ZHAO J, FANG L. MF-Net: multi-scale feature point cloud completion network combined with residual network[J]. Computer Engineering and Applications, 2023, 59(22): 202-212. | |
| [2] | MO S, XIE E, CHU R, et al. DiT-3D: exploring plain diffusion Transformers for 3D shape generation[C]// Proceedings of the 37th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2023: 67960-67971. |
| [3] | XIONG Y, DAI A. PT43D: a probabilistic Transformer for generating 3D shapes from single highly-ambiguous RGB images[C]// Proceedings of the 2024 British Machine Vision Conference. Durham: BMVA Press, 2024: No.77. |
| [4] | WU Y, YAN Z, CHEN C, et al. SCoDA: domain adaptive shape completion for real scans[C]// Proceedings of the 2023 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2023: 17630-17641. |
| [5] | 任世兴,韩燮,赵融,等. 一种由部件隐向量驱动的隐式三维重建方法[J]. 微电子学与计算机, 2025, 42(11): 9-1. |
| REN S X, HAN X, ZHAO R, et al. An implicit 3D reconstruction method driven by latent vectors of the components[J]. Microelectronics and Computer, 2025, 42(11): 9-1. | |
| [6] | RAHMAWATI D, SARNO R, FATICHAH C. Modification rules for improving marching cubes algorithm to represent 3D point cloud curve images[J]. International Journal of Intelligent Engineering and Systems, 2024, 17(1): 536-554. |
| [7] | WU R, XIAO C, ZHENG C. DeepCAD: a deep generative network for computer-aided design models[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 6752-6762. |
| [8] | IRSHAD M Z, KOLLAR T, LASKEY M, et al. CenterSnap: single-shot multi-object 3D shape reconstruction and categorical 6D pose and size estimation[C]// Proceedings of the 2022 International Conference on Robotics and Automation. Piscataway: IEEE, 2022: 10632-10640. |
| [9] | SHUAI Q, ZHANG C, YANG K, et al. DPF-Net: combining explicit shape priors in deformable primitive field for unsupervised structural reconstruction of 3D objects[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 14275-14283. |
| [10] | UY M A, HUANG J, SUNG M, et al. Deformation-aware 3D model embedding and retrieval[C]// Proceedings of the 2020 European Conference on Computer Vision, LNCS 12352. Cham: Springer, 2020: 397-413. |
| [11] | UY M A, KIM V G, SUNG M, et al. Joint learning of 3D shape retrieval and deformation[C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 11708-11717. |
| [12] | GÜMELI C, DAI A, NIEßNER M. ROCA: robust CAD model retrieval and alignment from a single image[C]// Proceedings of the 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2022: 4012-4021. |
| [13] | DI Y, ZHANG C, ZHANG R, et al. U-RED: unsupervised 3D shape retrieval and deformation for partial point clouds[C]// Proceedings of the 2023 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2023: 8850-8861. |
| [14] | GAO D, ROZENBERSZKI D, LEUTENEGGER S, et al. DiffCAD: weakly-supervised probabilistic CAD model retrieval and alignment from an RGB image[J]. ACM Transactions on Graphics, 2024, 43(4): No.106. |
| [15] | QI C R, YI L, SU H, et al. PointNet++: deep hierarchical feature learning on point sets in a metric space[C]// Proceedings of the 31st International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2017: 5105-5114. |
| [16] | WANG Y, SUN Y, LIU Z, et al. Dynamic graph CNN for learning on point clouds[J]. ACM Transactions on Graphics, 2019, 38(5): No.146. |
| [17] | ZHAO H, JIANG L, JIA J, et al. Point Transformer[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 16239-16248. |
| [18] | GAO Y, LIU X, LI J, et al. LFT-Net: local feature Transformer network for point clouds analysis[J]. IEEE Transactions on Intelligent Transportation Systems, 2023, 24(2): 2158-2168. |
| [19] | DENG C, LITANY O, DUAN Y, et al. Vector Neurons: a general framework for SO(3)-equivariant networks[C]// Proceedings of the 2021 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2021: 12180-12189. |
| [20] | ZHANG Z, ZHANG L, WANG Z, et al. Part-level scene reconstruction affords robot interaction[C]// Proceedings of the 2023 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2023: 11178-11185. |
| [21] | ZHAN L, LI W, MIN W. FA-ResNet: feature affine residual network for large-scale point cloud segmentation[J]. International Journal of Applied Earth Observation and Geoinformation, 2023, 118: No.103259. |
| [22] | HANOCKA R, HERTZ A, FISH N, et al. MeshCNN: a network with an edge[J]. ACM Transactions on Graphics, 2019, 38(4): No.90. |
| [23] | THEKUMPARAMPIL K K, WANG C, OH S, et al. Attention-based graph neural network for semi-supervised learning[EB/OL]. [2025-04-07].. |
| [24] | FAN H, SU H, GUIBAS L. A point set generation network for 3D object reconstruction from a single image[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2463-2471. |
| [25] | GOYAL A, BOCHKOVSKIY A, DENG J, et al. Non-deep networks[C]// Proceedings of the 36th International Conference on Neural Information Processing Systems. Red Hook: Curran Associates Inc., 2021: 6789-6801. |
| [26] | BORAWAR L, KAUR R. ResNet: solving vanishing gradient in deep networks[C]// Proceedings of International Conference on Recent Trends in Computing: ICRTC 2022, LNNS 600. Singapore: Springer, 2023: 235-247. |
| [27] | YU S, PANG S, SONG L, et al. TSoft-Net: a novel transfer soft thresholding network based on self-attention for intelligent fault diagnosis of rotating machinery[J]. Measurement, 2024, 227: No.114237. |
| [28] | MO K, ZHU S, CHANG A X, et al. PartNet: a large-scale benchmark for fine-grained and hierarchical part-level 3D object understanding[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 909-918. |
| [29] | CHANG A X, FUNKHOUSER T, GUIBAS L, et al. ShapeNet: an information-rich 3D model repository[EB/OL]. [2025-04-07].. |
| [30] | SUNG M, SU H, KIM V G, et al. ComplementMe: weakly-supervised component suggestions for 3D modeling[J]. ACM Transactions on Graphics, 2017, 36(6): No.226. |
| [31] | DAI A, CHANG A X, SAVVA M, et al. ScanNet: richly-annotated 3D reconstructions of indoor scenes[C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2432-2443. |
| [32] | AVETISYAN A, DAHNERT M, DAI A, et al. Scan2CAD: learning CAD model alignment in RGB-D scans[C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 2609-2618. |
| [1] | Wei ZHANG, Zhongwei GONG, Zhixin LI, Peihua LUO, Lingling SONG. Learning behavior boosted knowledge tracing model [J]. Journal of Computer Applications, 2025, 45(9): 2747-2754. |
| [2] | Zhiyu GONG, Shitong WANG. Learning method of residual network for heavy-tailed noisy image classification [J]. Journal of Computer Applications, 2025, 45(10): 3091-3100. |
| [3] | Yuanjiong LIU, Maozheng HE, Yibin HUANG, Cheng QIAN. Ship identification model based on ResNet50 and improved attention mechanism [J]. Journal of Computer Applications, 2024, 44(6): 1935-1941. |
| [4] | Lin GUO, Kunhu LIU, Chenyang MA, Youxue LAI, Yingfen XU. Image super-resolution reconstruction based on residual attention network with receptive field expansion [J]. Journal of Computer Applications, 2024, 44(5): 1579-1587. |
| [5] | Boyue WANG, Yingxiang LI, Jiandan ZHONG. Segmentation network for day and night ground-based cloud images based on improved Res-UNet [J]. Journal of Computer Applications, 2024, 44(4): 1310-1316. |
| [6] | Shunwang FU, Qian CHEN, Zhi LI, Guomei WANG, Yu LU. Two-channel progressive feature filtering network for tampered image detection and localization [J]. Journal of Computer Applications, 2024, 44(4): 1303-1309. |
| [7] | Jingxian ZHOU, Xina LI. UAV detection and recognition based on improved convolutional neural network and radio frequency fingerprint [J]. Journal of Computer Applications, 2024, 44(3): 876-882. |
| [8] | Xueyu HUANG, Huaiyu HE, Huimin LIN, Jinshui CHEN. Classification and recognition method of copper alloy metallograph based on feature aggregation [J]. Journal of Computer Applications, 2023, 43(8): 2593-2601. |
| [9] | Huibin ZHANG, Liping FENG, Yaojun HAO, Yining WANG. Ancient mural dynasty identification based on attention mechanism and transfer learning [J]. Journal of Computer Applications, 2023, 43(6): 1826-1832. |
| [10] | Lihua SHEN, Bo LI. Super-resolution reconstruction of lung CT images based on feature pyramid network and dense network [J]. Journal of Computer Applications, 2023, 43(5): 1612-1619. |
| [11] | Qihong SONG, Jianxun LIU, Haize HU, Xiangping ZHANG. Code search model based on collaborative fusion network [J]. Journal of Computer Applications, 2023, 43(12): 3896-3902. |
| [12] | Zhiang ZHANG, Guangzhong LIAO. Multi-scale feature enhanced retinal vessel segmentation algorithm based on U-Net [J]. Journal of Computer Applications, 2023, 43(10): 3275-3281. |
| [13] | Liefa LIAO, Zhiming LI, Saisai ZHANG. Image retrieval method based on deep residual network and iterative quantization hashing [J]. Journal of Computer Applications, 2022, 42(9): 2845-2852. |
| [14] | Huaiqing HE, Jianqing YAN, Kanghua HUI. Lightweight face recognition method based on deep residual network [J]. Journal of Computer Applications, 2022, 42(7): 2030-2036. |
| [15] | Yang ZHANG, Jiangbo HAO. Malicious code detection method based on attention mechanism and residual network [J]. Journal of Computer Applications, 2022, 42(6): 1708-1715. |
| Viewed | ||||||
|
Full text |
|
|||||
|
Abstract |
|
|||||