


《计算机应用》唯一官方网站 ›› 2021, Vol. 41 ›› Issue (11): 3337-3344.DOI: 10.11772/j.issn.1001-9081.2021010003
付豪, 徐和根( ), 张志明, 齐少华
), 张志明, 齐少华
收稿日期:2021-01-05
修回日期:2021-03-12
接受日期:2021-03-19
发布日期:2021-11-29
出版日期:2021-11-10
通讯作者:
徐和根
作者简介:付豪(1996—),男,安徽合肥人,硕士研究生,主要研究方向:视觉同步定位与地图构建、深度学习、机器视觉
Hao FU, Hegen XU(), Zhiming ZHANG, Shaohua QI
Received:2021-01-05
Revised:2021-03-12
Accepted:2021-03-19
Online:2021-11-29
Published:2021-11-10
Contact:
Hegen XU
About author:FU Hao,born in 1996,M. S. candidate. His research interests
include visual simultaneous localization and mapping,deep learning,
machine vision摘要:
针对动态场景下的定位与静态语义地图构建问题,提出了一种基于语义和光流约束的动态环境下的同步定位与地图构建(SLAM)算法,以降低动态物体对定位与建图的影响。首先,对于输入的每一帧,通过语义分割获得图像中物体的掩模,再通过几何方法过滤不符合极线约束的特征点;接着,结合物体掩模与光流计算出每个物体的动态概率,根据动态概率过滤特征点以得到静态特征点,再利用静态特征点进行后续的相机位姿估计;然后,基于RGB-D图片和物体动态概率建立静态点云,并结合语义分割建立语义八叉树地图。最后,基于静态点云与语义分割创建稀疏语义地图。公共TUM数据集上的测试结果表明,高动态场景下,所提算法与ORB-SLAM2相比,在绝对轨迹误差和相对位姿误差上能取得95%以上的性能提升,与DS-SLAM、DynaSLAM相比分别减小了41%和11%的绝对轨迹误差,验证了该算法在高动态场景中具有较好的定位精度和鲁棒性。地图构建的实验结果表明,所提算法创建了静态语义地图,与点云地图相比,稀疏语义地图的存储空间需求量降低了99%。
中图分类号:
付豪, 徐和根, 张志明, 齐少华. 动态场景下基于语义和光流约束的视觉同步定位与地图构建[J]. 计算机应用, 2021, 41(11): 3337-3344.
Hao FU, Hegen XU, Zhiming ZHANG, Shaohua QI. Visual simultaneous localization and mapping based on semantic and optical flow constraints in dynamic scenes[J]. Journal of Computer Applications, 2021, 41(11): 3337-3344.

图1 本文算法总体框架
Fig. 1 Overall framework of proposed algorithm

图2 动态特征点过滤算法的框架
Fig. 2 Framework of dynamic feature point filtering algorithm

图3 语义分割网络的分割结果
Fig. 3 Segmentation results of semantic segmentation network

图4 对极几何示意图
Fig. 4 Schematic diagram of epipolar geometry

图5 直接计算光流的结果
Fig. 5 Results of direct calculation of optical flow

图6 矫正后的光流计算结果
Fig. 6 Results of optical flow calculation after correction

图7 根据动态物体掩膜和光流过滤动态点建立静态点云图
Fig. 7 Using moving object masks and optical flow to filter out dynamic points forconstructing static point cloud map

图8 基于语义分割的点云分割结果
Fig. 8 Point cloud segmentation results based onsemantic segmentation

图9 物体包围盒
Fig. 9 Object bounding box

图10 语义地图更新流程
Fig. 10 Flow chart of semantic map updating
| 序列 | 绝对轨迹误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.599 9 | 0.566 3 | 0.329 7 | 0.684 5 | 0.021 7 | 0.018 4 | 0.013 6 | 0.025 6 | 96.4 | 96.8 | 95.9 | 96.3 |
| W-rpy | 0.686 2 | 0.623 3 | 0.408 7 | 0.799 1 | 0.025 9 | 0.020 5 | 0.019 4 | 0.032 4 | 96.2 | 96.7 | 95.3 | 95.9 |
| W-static | 0.287 6 | 0.245 9 | 0.133 9 | 0.317 3 | 0.005 9 | 0.005 4 | 0.003 1 | 0.006 7 | 97.9 | 97.8 | 97.6 | 97.9 |
| W-xyz | 0.370 5 | 0.650 0 | 0.645 3 | 0.744 1 | 0.013 1 | 0.011 4 | 0.007 5 | 0.015 1 | 96.5 | 98.2 | 98.8 | 98.0 |
| S-hs | 0.014 1 | 0.011 4 | 0.011 8 | 0.018 4 | 0.013 7 | 0.011 3 | 0.010 6 | 0.017 3 | 2.6 | 0.7 | 5.7 | |
| S-rpy | 0.016 0 | 0.010 9 | 0.016 1 | 0.022 6 | 0.013 7 | 0.010 6 | 0.010 0 | 0.017 0 | 14.2 | 2.9 | 37.4 | 25.0 |
表1 绝对轨迹误差结果比较
Tab. 1 Result comparison of absolute trajectory error
| 序列 | 绝对轨迹误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.599 9 | 0.566 3 | 0.329 7 | 0.684 5 | 0.021 7 | 0.018 4 | 0.013 6 | 0.025 6 | 96.4 | 96.8 | 95.9 | 96.3 |
| W-rpy | 0.686 2 | 0.623 3 | 0.408 7 | 0.799 1 | 0.025 9 | 0.020 5 | 0.019 4 | 0.032 4 | 96.2 | 96.7 | 95.3 | 95.9 |
| W-static | 0.287 6 | 0.245 9 | 0.133 9 | 0.317 3 | 0.005 9 | 0.005 4 | 0.003 1 | 0.006 7 | 97.9 | 97.8 | 97.6 | 97.9 |
| W-xyz | 0.370 5 | 0.650 0 | 0.645 3 | 0.744 1 | 0.013 1 | 0.011 4 | 0.007 5 | 0.015 1 | 96.5 | 98.2 | 98.8 | 98.0 |
| S-hs | 0.014 1 | 0.011 4 | 0.011 8 | 0.018 4 | 0.013 7 | 0.011 3 | 0.010 6 | 0.017 3 | 2.6 | 0.7 | 5.7 | |
| S-rpy | 0.016 0 | 0.010 9 | 0.016 1 | 0.022 6 | 0.013 7 | 0.010 6 | 0.010 0 | 0.017 0 | 14.2 | 2.9 | 37.4 | 25.0 |
| 序列 | 相对平移误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.830 9 | 0.761 2 | 0.605 4 | 1.028 1 | 0.031 5 | 0.028 4 | 0.017 3 | 0.036 0 | 96.2 | 96.3 | 97.1 | 96.5 |
| W-rpy | 0.991 9 | 0.919 7 | 0.650 7 | 1.186 0 | 0.038 9 | 0.032 3 | 0.026 0 | 0.046 7 | 96.1 | 96.5 | 96.0 | 96.1 |
| W-static | 0.318 4 | 0.109 2 | 0.325 6 | 0.455 4 | 0.008 5 | 0.007 9 | 0.004 1 | 0.009 4 | 97.3 | 92.7 | 98.7 | 97.9 |
| W-xyz | 0.892 5 | 0.870 8 | 0.629 1 | 1.091 9 | 0.019 3 | 0.017 3 | 0.010 5 | 0.022 0 | 97.8 | 98.0 | 98.3 | 98.0 |
| S-hs | 0.020 7 | 0.016 5 | 0.017 6 | 0.027 2 | 0.020 4 | 0.017 1 | 0.015 2 | 0.025 4 | 1.6 | 13.6 | 6.5 | |
| S-rpy | 0.021 5 | 0.018 7 | 0.025 4 | 0.033 3 | 0.025 4 | 0.012 4 | 0.022 2 | 0.037 3 | 33.6 | 12.8 | ||
表2 相对位姿误差的平移误差结果比较
Tab. 2 Result comparison of translation error of relative pose error
| 序列 | 相对平移误差/m | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 0.830 9 | 0.761 2 | 0.605 4 | 1.028 1 | 0.031 5 | 0.028 4 | 0.017 3 | 0.036 0 | 96.2 | 96.3 | 97.1 | 96.5 |
| W-rpy | 0.991 9 | 0.919 7 | 0.650 7 | 1.186 0 | 0.038 9 | 0.032 3 | 0.026 0 | 0.046 7 | 96.1 | 96.5 | 96.0 | 96.1 |
| W-static | 0.318 4 | 0.109 2 | 0.325 6 | 0.455 4 | 0.008 5 | 0.007 9 | 0.004 1 | 0.009 4 | 97.3 | 92.7 | 98.7 | 97.9 |
| W-xyz | 0.892 5 | 0.870 8 | 0.629 1 | 1.091 9 | 0.019 3 | 0.017 3 | 0.010 5 | 0.022 0 | 97.8 | 98.0 | 98.3 | 98.0 |
| S-hs | 0.020 7 | 0.016 5 | 0.017 6 | 0.027 2 | 0.020 4 | 0.017 1 | 0.015 2 | 0.025 4 | 1.6 | 13.6 | 6.5 | |
| S-rpy | 0.021 5 | 0.018 7 | 0.025 4 | 0.033 3 | 0.025 4 | 0.012 4 | 0.022 2 | 0.037 3 | 33.6 | 12.8 | ||
| 序列 | 相对旋转误差/(°) | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 19.485 0 | 16.638 0 | 13.369 0 | 23.631 0 | 0.755 3 | 0.704 0 | 0.372 8 | 0.842 2 | 96.1 | 95.8 | 97.2 | 96.4 |
| W-rpy | 16.920 0 | 14.999 0 | 12.646 0 | 21.124 0 | 0.803 4 | 0.711 0 | 0.463 0 | 0.927 2 | 95.3 | 95.3 | 96.3 | 95.6 |
| W-static | 5.569 5 | 1.886 2 | 5.634 1 | 7.922 3 | 0.246 4 | 0.233 3 | 0.114 5 | 0.271 7 | 95.6 | 87.6 | 98.0 | 96.6 |
| W-xyz | 16.338 0 | 15.561 0 | 11.638 0 | 20.059 0 | 0.490 4 | 0.408 6 | 0.395 2 | 0.629 8 | 97.0 | 97.4 | 96.6 | 96.9 |
| S-hs | 0.661 3 | 0.624 3 | 0.307 8 | 0.729 4 | 0.633 5 | 0.596 4 | 0.294 4 | 0.698 5 | 4.2 | 4.5 | 4.3 | 4.2 |
| S-rpy | 0.783 1 | 0.666 3 | 0.512 1 | 0.935 7 | 0.751 0 | 0.641 3 | 0.510 1 | 0.921 7 | 4.1 | 3.8 | 0.4 | 1.5 |
表3 相对位姿误差的旋转误差结果比较
Tab. 3 Result comparison of rotation error of relative pose error
| 序列 | 相对旋转误差/(°) | 本文算法的性能提升/% | ||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|
| ORB-SLAM2 | 本文算法 | |||||||||||
| 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | 平均数 | 中位数 | SD | RMSE | |
| W-hs | 19.485 0 | 16.638 0 | 13.369 0 | 23.631 0 | 0.755 3 | 0.704 0 | 0.372 8 | 0.842 2 | 96.1 | 95.8 | 97.2 | 96.4 |
| W-rpy | 16.920 0 | 14.999 0 | 12.646 0 | 21.124 0 | 0.803 4 | 0.711 0 | 0.463 0 | 0.927 2 | 95.3 | 95.3 | 96.3 | 95.6 |
| W-static | 5.569 5 | 1.886 2 | 5.634 1 | 7.922 3 | 0.246 4 | 0.233 3 | 0.114 5 | 0.271 7 | 95.6 | 87.6 | 98.0 | 96.6 |
| W-xyz | 16.338 0 | 15.561 0 | 11.638 0 | 20.059 0 | 0.490 4 | 0.408 6 | 0.395 2 | 0.629 8 | 97.0 | 97.4 | 96.6 | 96.9 |
| S-hs | 0.661 3 | 0.624 3 | 0.307 8 | 0.729 4 | 0.633 5 | 0.596 4 | 0.294 4 | 0.698 5 | 4.2 | 4.5 | 4.3 | 4.2 |
| S-rpy | 0.783 1 | 0.666 3 | 0.512 1 | 0.935 7 | 0.751 0 | 0.641 3 | 0.510 1 | 0.921 7 | 4.1 | 3.8 | 0.4 | 1.5 |

图11 实验室环境图片
Fig. 11 Photograph of laboratory environment
| 序列 | DS-SLAM | DynaSLAM | 本文算法 |
|---|---|---|---|
| W-hs | 0.030 3 | 0.025 | 0.025 6 |
| W-rpy | 0.444 2 | 0.040 | 0.032 4 |
| W-static | 0.008 1 | 0.009 | 0.006 7 |
| W-xyz | 0.024 7 | 0.015 | 0.015 1 |
表4 不同算法的绝对轨迹误差对比 ( m)
Tab. 4 Comparison of absolute trajectory error of different algorithms
| 序列 | DS-SLAM | DynaSLAM | 本文算法 |
|---|---|---|---|
| W-hs | 0.030 3 | 0.025 | 0.025 6 |
| W-rpy | 0.444 2 | 0.040 | 0.032 4 |
| W-static | 0.008 1 | 0.009 | 0.006 7 |
| W-xyz | 0.024 7 | 0.015 | 0.015 1 |
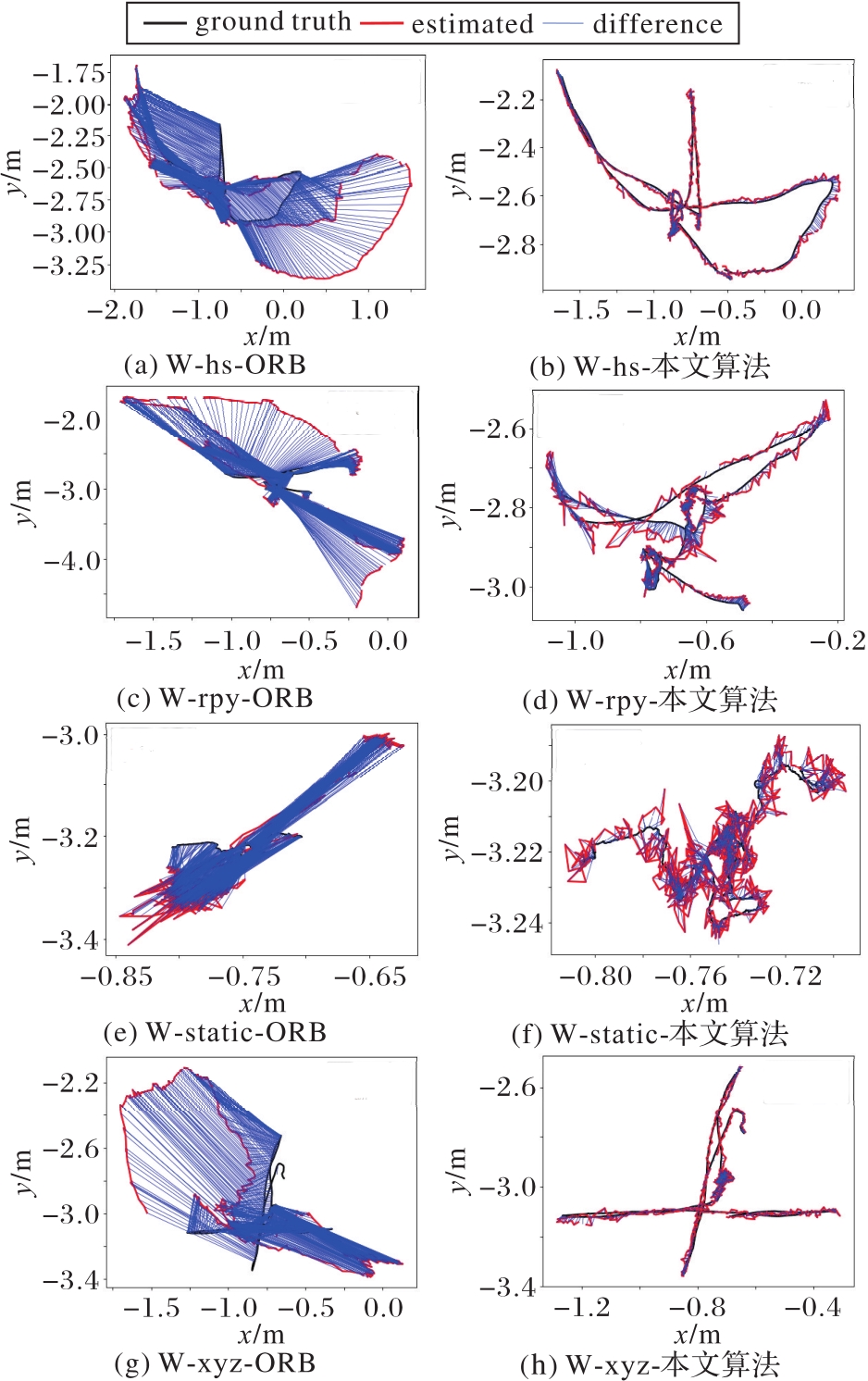
图12 不同算法在高动态场景下估计的轨迹对比
Fig. 12 Comparison of trajectories estimated by different algorithms in highly dynamic scenes

图13 实验室环境下不同算法估计的轨迹
Fig. 13 Trajectories estimated by different algorithms in laboratory environment
| 模块 | 运行时间/ms |
|---|---|
| ORB特征提取 | 9.0 |
| 语义分割 | 169.4 |
| 动态特征点过滤 | 51.3 |
表5 不同模块的运行时间
Tab. 5 Running times of different modules
| 模块 | 运行时间/ms |
|---|---|
| ORB特征提取 | 9.0 |
| 语义分割 | 169.4 |
| 动态特征点过滤 | 51.3 |

图14 稠密点云地图
Fig. 14 Dense point cloud map

图15 语义地图
Fig. 15 Semantic map
| 轨迹 | 地图文件存储空间/MB | ||
|---|---|---|---|
| 点云地图 | 八叉树地图 | 稀疏语义地图 | |
| W-xyz | 13.3 | 0.37 | 0.004 |
| W-static | 15.5 | 0.18 | 0.004 |
表6 地图文件存储空间对比
Tab. 6 Comparison of map file storage space
| 轨迹 | 地图文件存储空间/MB | ||
|---|---|---|---|
| 点云地图 | 八叉树地图 | 稀疏语义地图 | |
| W-xyz | 13.3 | 0.37 | 0.004 |
| W-static | 15.5 | 0.18 | 0.004 |
| 1 | 权美香,朴松昊,李国.视觉SLAM综述[J].智能系统学报,2016,11(6):768-776. 10.11992/tis.201607026 |
| QUAN M X, PIAO S H, LI G. An overview of visual SLAM [J]. CAAI Transactions on Intelligent Systems, 2016, 11(6): 768-776. 10.11992/tis.201607026 | |
| 2 | BRAHMBHATT S, GU J W, KIM K, et al. Geometry-aware learning of maps for camera localization [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 2616-2625. 10.1109/cvpr.2018.00277 |
| 3 | 付梦印,吕宪伟,刘彤,等.基于RGB-D数据的实时SLAM算法[J].机器人,2015,37(6):683-692. 10.13973/j.cnki.robot.2015.0683 |
| FU M Y, LYU X W, LIU T, et al. Real-time SLAM algorithm based on RGB-D data [J]. Robot, 2015, 37(6): 683-692. 10.13973/j.cnki.robot.2015.0683 | |
| 4 | CADENA C, CARLONE L, CARRILLO H, et al. Past, present, and future of simultaneous localization and mapping: toward the robust-perception age [J]. IEEE Transactions on Robotics, 2016, 32(6): 1309-1332. 10.1109/TRO.2016.2624754 |
| 5 | FANG Y Q, DAI B. An improved moving target detecting and tracking based on Optical Flow technique and Kalman filter [C]// Proceedings of the 2009 4th International Conference on Computer Science and Education. Piscataway: IEEE, 2009: 1197-1202. 10.1109/iccse.2009.5228464 |
| 6 | WANG Y B, HUANG S D. Towards dense moving object segmentation based robust dense RGB-D SLAM in dynamic scenarios [C]// Proceedings of the 2014 13th International Conference on Control Automation Robotics and Vision. Piscataway: IEEE, 2014: 1841-1846. 10.1109/icarcv.2014.7064596 |
| 7 | BAKKAY M C, ARAFA M, ZAGROUBA E. Dense 3D SLAM in dynamic scenes using Kinect [C]// Proceedings of the 2015 7th Iberian Conference on Pattern Recognition and Image Analysis, LNCS9117. Cham: Springer, 2015: 121-129. |
| 8 | ZHAO L L, LIU Z L, CHEN J W, et al. A compatible framework for RGB-D SLAM in dynamic scenes [J]. IEEE Access, 2019, 7: 75604-75614. 10.1109/access.2019.2922733 |
| 9 | BADRINARAYANAN V, KENDALL A, CIPOLLA R. SegNet: a deep convolutional encoder-decoder architecture for image segmentation [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(12): 2481-2495. 10.1109/tpami.2016.2644615 |
| 10 | CHEN L C, PAPANDREOU G, KOKKINOS I, et al. DeepLab: semantic image segmentation with deep convolutional nets, atrous convolution, and fully connected CRFs [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2018, 40(4): 834-848. 10.1109/tpami.2017.2699184 |
| 11 | HE K M, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2017: 2980-2988. 10.1109/iccv.2017.322 |
| 12 | ZHONG F W, WANG S, ZHANG Z Q, et al. Detect-SLAM: making object detection and SLAM mutually beneficial [C]// Proceedings of the 2018 IEEE Winter Conference on Applications of Computer Vision. Piscataway: IEEE, 2018: 1001-1010. 10.1109/wacv.2018.00115 |
| 13 | BESCOS B, FÁCIL J M, CIVERA J, et al. DynaSLAM: tracking, mapping and inpainting in dynamic scenes [J]. IEEE Robotics and Automation Letters, 2018, 3(4): 4076-4083. 10.1109/lra.2018.2860039 |
| 14 | YU C, LIU Z X , LIU X J, et al. DS-SLAM: a semantic visual SLAM towards dynamic environments [C]// Proceedings of the 2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2018: 1168-1174. 10.1109/iros.2018.8593691 |
| 15 | HORNUNG A, WURM K M, BENNEWITZ M, et al. OctoMap: an efficient probabilistic 3D mapping framework based on octrees [J]. Autonomous Robots, 2013, 34(3): 189-206. 10.1007/s10514-012-9321-0 |
| 16 | WEINZAEPFEL P, REVAUD J, HARCHAOUI Z, et al. DeepFlow: large displacement optical flow with deep matching [C]// Proceedings of the 2013 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2013: 1385-1392. 10.1109/iccv.2013.175 |
| [1] | 张鹏飞, 韩李涛, 冯恒健, 李洪梅. 基于注意力机制和全局特征优化的点云语义分割[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1086-1092. |
| [2] | 李威, 陈玲, 徐修远, 朱敏, 郭际香, 周凯, 牛颢, 张煜宸, 易珊烨, 章毅, 罗凤鸣. 基于多任务学习的间质性肺病分割算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1285-1293. |
| [3] | 王铂越, 李英祥, 钟剑丹. 基于改进Res-UNet的昼夜地基云图分割网络[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1310-1316. |
| [4] | 吴宁, 罗杨洋, 许华杰. 基于多尺度特征融合的遥感图像语义分割方法[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 737-744. |
| [5] | 李子怡, 曲婷婷, 崇乾鹏, 徐金东. 基于模糊多尺度特征的遥感图像分割网络[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3581-3586. |
| [6] | 刘永江, 陈斌. 基于多尺度记忆库的像素级无监督工业异常检测[J]. 《计算机应用》唯一官方网站, 2024, 44(11): 3587-3594. |
| [7] | 郑秋梅, 牛薇薇, 王风华, 赵丹. 基于细节增强的双分支实时语义分割网络[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3058-3066. |
| [8] | 阚绪康, 史格非, 杨雪榕. 基于动态特征点滤除与关键帧选择优化的ORB-SLAM2算法[J]. 《计算机应用》唯一官方网站, 2024, 44(10): 3185-3190. |
| [9] | 王朱佳, 余宙, 俞俊, 范建平. 基于多尺度时空Transformer的视频动态场景图生成模型[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 47-57. |
| [10] | 周迪, 张自力, 陈佳, 胡新荣, 何儒汉, 张俊. 基于EfficientNetV2和物体上下文表示的胃癌图像分割方法[J]. 《计算机应用》唯一官方网站, 2023, 43(9): 2955-2962. |
| [11] | 郑帅, 张晓龙, 邓鹤, 任宏伟. 基于多尺度特征融合和网格注意力机制的三维肝脏影像分割方法[J]. 《计算机应用》唯一官方网站, 2023, 43(7): 2303-2310. |
| [12] | 鲁斌, 柳杰林. 基于特征增强的三维点云语义分割[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1818-1825. |
| [13] | 袁泉, 徐雲鹏, 唐成亮. 基于路径标签的文档级关系抽取方法[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1029-1035. |
| [14] | 何雪东, 宣士斌, 王款, 陈梦楠. 融合累积分布函数和通道注意力机制的DeepLabV3+图像分割算法[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 936-942. |
| [15] | 廉飞宇, 张良, 王杰栋, 靳于康, 柴玉. 基于图模型与注意力机制的室外场景点云分割模型[J]. 《计算机应用》唯一官方网站, 2023, 43(12): 3911-3917. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||