


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (10): 3185-3190.DOI: 10.11772/j.issn.1001-9081.2023101465
阚绪康1, 史格非1,2( ), 杨雪榕1
), 杨雪榕1
收稿日期:2023-10-27
修回日期:2024-01-26
接受日期:2024-02-04
发布日期:2024-10-15
出版日期:2024-10-10
通讯作者:
史格非
作者简介:阚绪康(1998—),男,安徽滁州人,硕士研究生,主要研究方向:视觉SLAM、语义SLAM
Xukang KAN1, Gefei SHI1,2(), Xuerong YANG1
Received:2023-10-27
Revised:2024-01-26
Accepted:2024-02-04
Online:2024-10-15
Published:2024-10-10
Contact:
Gefei SHI
About author:KAN Xukang, born in 1998, M. S. candidate. His research interests include visual SLAM, semantic SLAM.Supported by:摘要:
同时定位与建图(SLAM)算法在有运动目标的情况下存在定位精度下降的问题,而引入实例分割等算法虽然可以应对动态场景,但难以保证SLAM算法的实时性,且在运动时相机抖动会导致关键帧选择不准确和跟踪易丢失的问题。针对上述问题,提出一种基于动态特征点滤除与关键帧选择优化的ORB-SLAM2算法,以保证SLAM算法的实时性,并有效减少动态特征点对SLAM算法定位精度的影响,同时应对由相机抖动造成的关键帧选择不准确的问题。所提算法通过在ORB-SLAM2算法的基础上引入YOLOv5算法识别运动目标,在跟踪线程滤除动态目标特征点,从而兼顾算法的实时性与定位精度。同时,在选择关键帧上提出一种基于帧间相对运动量的判别准则,从而提高关键帧选择的准确性。在freiburg3_walking_xyz数据集的上实验结果表明,与ORB-SLAM2算法相比,所提算法的平均耗时减少了38.54%,绝对轨迹误差中的均方根误差(RMSE)精度提高了95.2%。可见,所提算法能有效解决上述问题,提升SLAM算法的定位精度和准确性,进而提升地图的可用性。
中图分类号:
阚绪康, 史格非, 杨雪榕. 基于动态特征点滤除与关键帧选择优化的ORB-SLAM2算法[J]. 计算机应用, 2024, 44(10): 3185-3190.
Xukang KAN, Gefei SHI, Xuerong YANG. ORB-SLAM2 algorithm based on dynamic feature point filtering and optimization of keyframe selection[J]. Journal of Computer Applications, 2024, 44(10): 3185-3190.
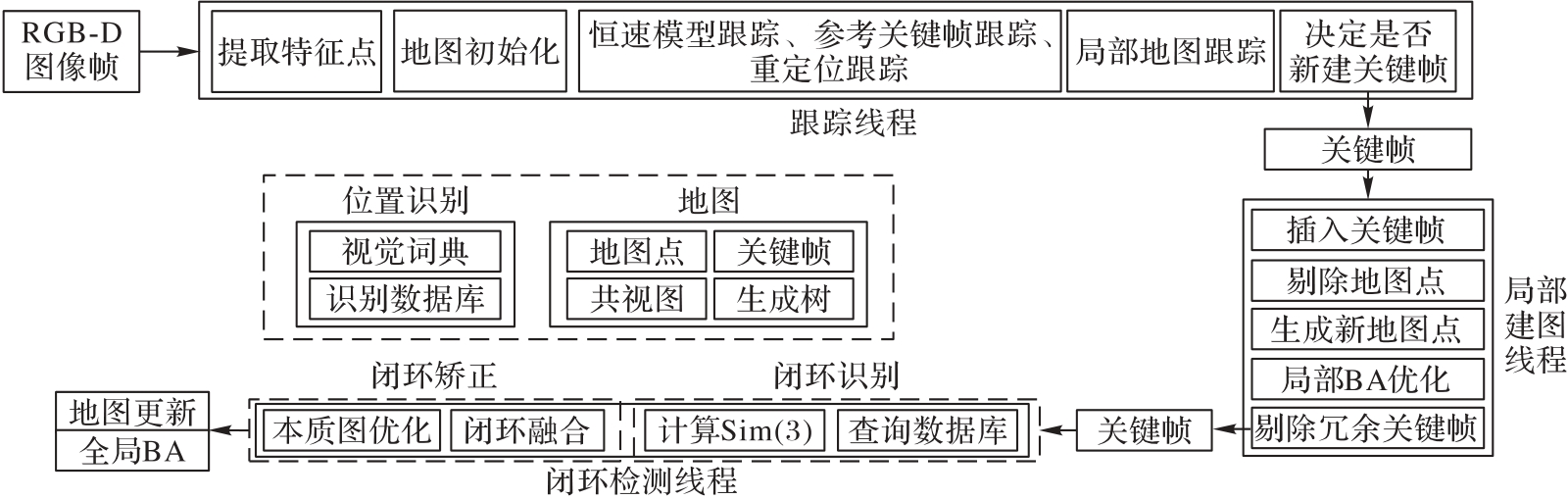
图1 ORB-SLAM2算法的框架
Fig. 1 ORB-SLAM2 algorithm framework

图2 动态特征点剔除算法的流程
Fig. 2 Flow of dynamic feature point elimination algorithm
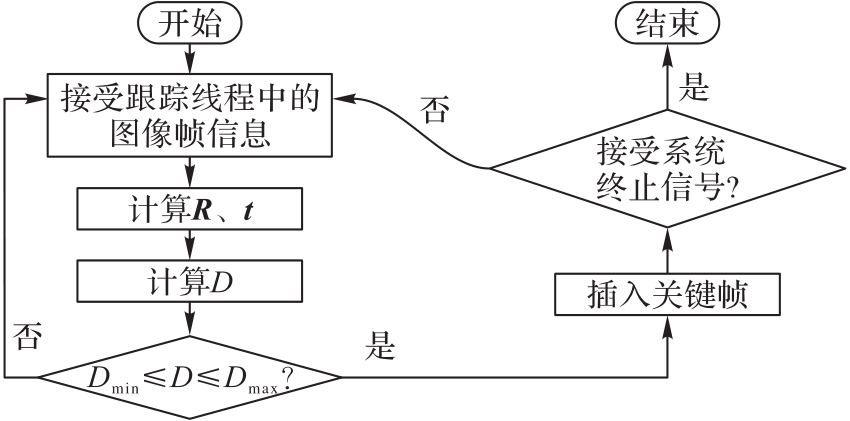
图3 关键帧选择算法流程
Fig. 3 Flow of keyframe selection algorithm
| 算法 | 第1次 | 第2次 | 第3次 | 平均值 |
|---|---|---|---|---|
| ORB-SLAM2 | 55.782 | 54.220 | 59.257 | 56.420 |
引入PSPNet算法的 ORB-SLAM2算法 | 81.321 | 79.301 | 79.405 | 80.009 |
| 本文算法 | 34.454 | 34.487 | 35.080 | 34.674 |
表1 各算法在freiburg3_walking_xyz数据集上的耗时 (ms)
Tab. 1 Time consumption of different algorithms on freiburg3_walking_xyz dataset
| 算法 | 第1次 | 第2次 | 第3次 | 平均值 |
|---|---|---|---|---|
| ORB-SLAM2 | 55.782 | 54.220 | 59.257 | 56.420 |
引入PSPNet算法的 ORB-SLAM2算法 | 81.321 | 79.301 | 79.405 | 80.009 |
| 本文算法 | 34.454 | 34.487 | 35.080 | 34.674 |
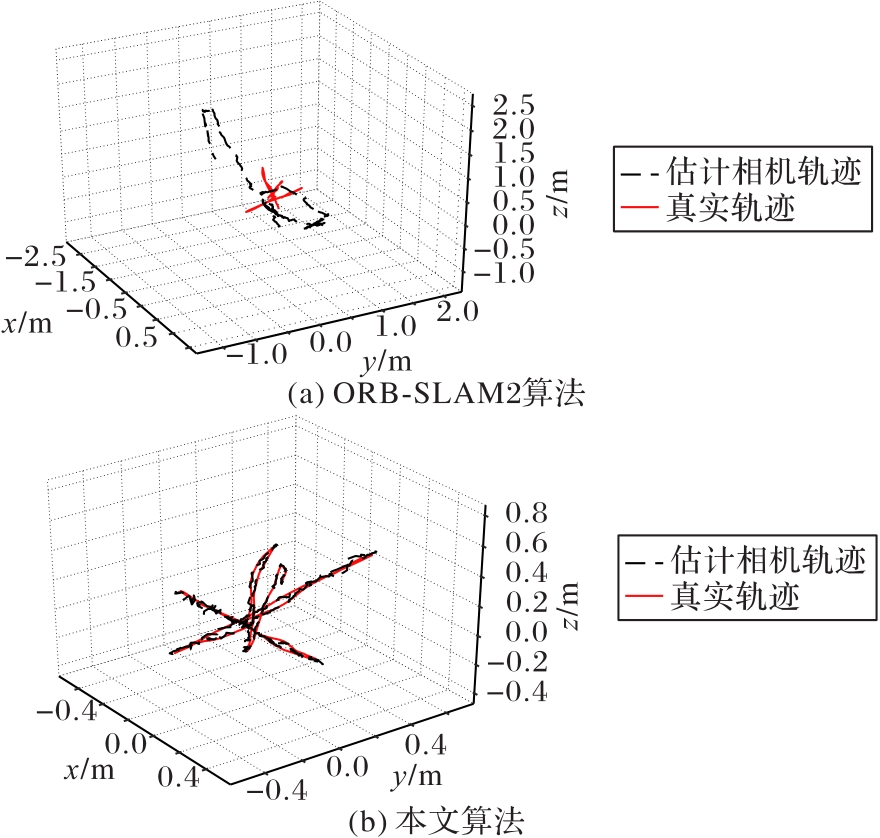
图4 运行freiburg3_walking_xyz的估计轨迹和真实轨迹对比
Fig. 4 Comparison of estimated trajectory and real trajectory when running freiburg3_walking_xyz

图5 运行freiburg3_walking_xyz数据集的ORB-SLAM2算法与本文算法的绝对轨迹位姿图
Fig. 5 Absolute trajectory pose diagrams of ORB-SLAM2 algorithm and proposed algorithm when running freiburg3_walking_xyz dataset

图6 运行freiburg3_walking_halfsphere的ORB-SLAM2算法与本文算法的绝对轨迹位姿图
Fig. 6 Absolute trajectory pose diagrams of ORB-SLAM2 algorithm and proposed algorithm when running freiburg3_walking_halfsphere dataset

图7 运行freiburg3_walking_static数据集的ORB-SLAM2算法与本文算法的绝对轨迹位姿图
Fig. 7 Absolute trajectory pose diagrams of ORB-SLAM2 algorithm and proposed algorithm when running freiburg3_walking_static dataset
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.293 7 | 0.255 6 | 0.240 1 | 0.144 6 | 0.014 1 | 0.012 1 | 0.010 9 | 0.007 1 |
| freiburg3_walking_halfsphere | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
| freiburg3_walking_static | 0.025 0 | 0.021 3 | 0.018 8 | 0.013 2 | 0.008 6 | 0.007 6 | 0.006 9 | 0.004 0 |
表2 绝对轨迹误差对比 (m)
Tab. 2 Absolute trajectory error comparison
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.293 7 | 0.255 6 | 0.240 1 | 0.144 6 | 0.014 1 | 0.012 1 | 0.010 9 | 0.007 1 |
| freiburg3_walking_halfsphere | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
| freiburg3_walking_static | 0.025 0 | 0.021 3 | 0.018 8 | 0.013 2 | 0.008 6 | 0.007 6 | 0.006 9 | 0.004 0 |
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.030 1 | 0.024 2 | 0.020 0 | 0.017 9 | 0.012 5 | 0.010 0 | 0.008 2 | 0.007 4 |
| freiburg3_walking_halfsphere | 0.025 3 | 0.019 0 | 0.014 0 | 0.016 6 | 0.017 8 | 0.013 0 | 0.010 1 | 0.012 1 |
| freiburg3_walking_static | 0.014 1 | 0.009 5 | 0.005 8 | 0.010 4 | 0.007 8 | 0.006 3 | 0.005 3 | 0.004 5 |
表3 相对轨迹误差对比 (m)
Tab. 3 Relative trajectory error comparison
| 数据集序列 | ORB-SLAM2算法 | 本文算法 | ||||||
|---|---|---|---|---|---|---|---|---|
| 均方根误差 | 平均值 | 中位数 | 标准差 | 均方根误差 | 平均值 | 中位数 | 标准差 | |
| freiburg3_walking_xyz | 0.030 1 | 0.024 2 | 0.020 0 | 0.017 9 | 0.012 5 | 0.010 0 | 0.008 2 | 0.007 4 |
| freiburg3_walking_halfsphere | 0.025 3 | 0.019 0 | 0.014 0 | 0.016 6 | 0.017 8 | 0.013 0 | 0.010 1 | 0.012 1 |
| freiburg3_walking_static | 0.014 1 | 0.009 5 | 0.005 8 | 0.010 4 | 0.007 8 | 0.006 3 | 0.005 3 | 0.004 5 |
| 算法 | 均方根误差 | 平均值 | 中位数 | 标准差 |
|---|---|---|---|---|
| ORB-SLAM2 | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 |
引入PSPNet算法的 ORB-SLAM2算法 | 0.037 4 | 0.029 3 | 0.025 1 | 0.018 2 |
| 本文算法 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
表4 不同算法在数据集运行freiburg3_walking_halfsphere的绝对轨迹误差对比 (m)
Tab. 4 Comparison of absolute trajectory errors of different algorithms when running freiburg3_walking_halfsphere dataset
| 算法 | 均方根误差 | 平均值 | 中位数 | 标准差 |
|---|---|---|---|---|
| ORB-SLAM2 | 0.315 3 | 0.285 5 | 0.279 6 | 0.133 7 |
引入PSPNet算法的 ORB-SLAM2算法 | 0.037 4 | 0.029 3 | 0.025 1 | 0.018 2 |
| 本文算法 | 0.021 9 | 0.017 2 | 0.014 0 | 0.013 4 |
| 数据集序列 | ORB-SLAM2算法 | 本文算法 |
|---|---|---|
| freiburg3_walking_xyz | 90 | 97 |
| freiburg3_walking_halfsphere | 151 | 172 |
| freiburg3_walking_static | 51 | 54 |
表5 不同数据集上ORB-SLAM2算法与本文算法的关键帧数
Tab. 5 Number of keyframes between ORB-SLAM2 algorithm and proposed algorithm on different datasets
| 数据集序列 | ORB-SLAM2算法 | 本文算法 |
|---|---|---|
| freiburg3_walking_xyz | 90 | 97 |
| freiburg3_walking_halfsphere | 151 | 172 |
| freiburg3_walking_static | 51 | 54 |
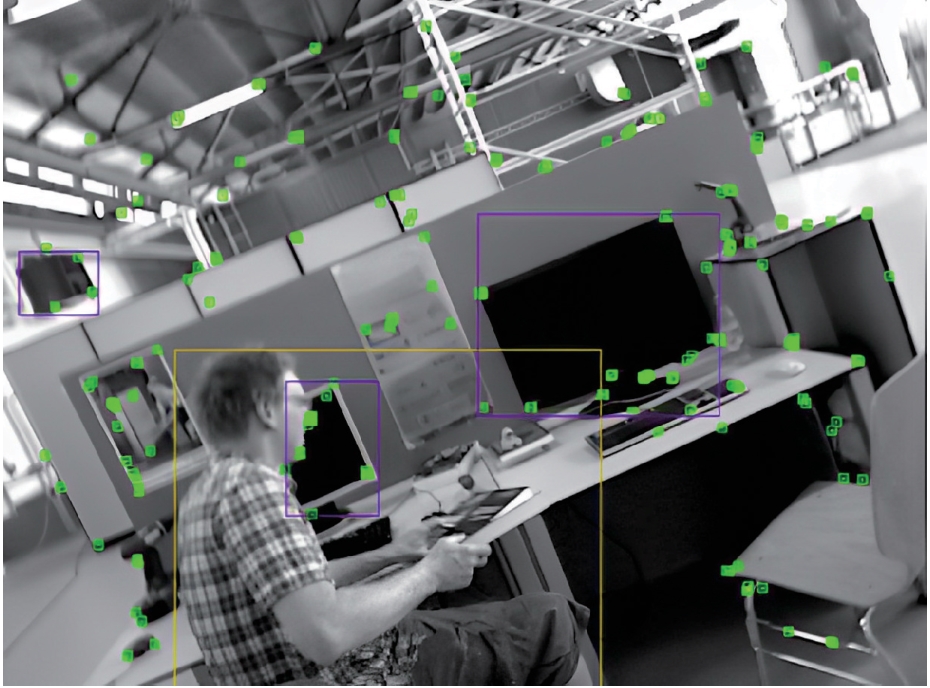
图8 关键帧选择算法在freiburg3_walking_halfsphere数据集上的运行结果
Fig. 8 Running results of keyframe selection algorithm on freiburg3_walking_halfsphere dataset
| 1 | CHENG J, ZHANG L, CHEN Q, et al. A review of visual SLAM methods for autonomous driving vehicles[J]. Engineering Applications of Artificial Intelligence, 2022, 114: No.104992. |
| 2 | ZHENG S, WANG J, RIZOS C, et al. Simultaneous Localization And Mapping (SLAM) for autonomous driving: concept and analysis[J]. Remote Sensing, 2023, 15(4): No.1156. |
| 3 | SHARAFUTDINOV D, GRIGULETSKII M, KOPANEV P, et al. Comparison of modern open-source visual SLAM approaches[J]. Journal of Intelligent and Robotic Systems, 2023, 107: No.43. |
| 4 | 郑太雄,江明哲,冯明驰. 基于视觉的采摘机器人目标识别与定位方法研究综述[J]. 仪器仪表学报, 2021, 42(9): 28-51. |
| ZHENG T X, JIANG M Z, FENG M C. Vision based target recognition and location for picking robot: a review[J]. Chinese Journal of Scientific Instrument, 2021, 42(9): 28-51. | |
| 5 | ZHANG H, YE F, LAI Y, et al. IQ-VIO: adaptive visual inertial odometry via interference quantization under dynamic environments[J]. Intelligent Service Robotics, 2023, 16(5): 565-581. |
| 6 | ZHAO X, ZUO T, HU X. OFM-SLAM: a visual semantic SLAM for dynamic indoor environments[J]. Mathematical Problems in Engineering, 2021, 2021: No.5538840. |
| 7 | GONZALEZ M, MARCHAND E, KACETE A, et al. TwistSLAM: constrained SLAM in dynamic environment[J]. IEEE Robotics and Automation Letters, 2022, 7(3): 6846-6853. |
| 8 | ZHANG L, WISTH D, CAMURRI M, et al. Balancing the budget: feature selection and tracking for multi-camera visual-inertial odometry[J]. IEEE Robotics and Automation Letters, 2022, 7(2): 1182-1189. |
| 9 | ZHANG X, WANG X, ZHANG R. Dynamic semantics SLAM based on improved Mask R-CNN[J]. IEEE Access, 2022, 10: 126525-126535. |
| 10 | FAN Y, ZHANG Q, TANG Y, et al. Blitz-SLAM: a semantic SLAM in dynamic environments[J]. Pattern Recognition, 2022, 121: No.108225. |
| 11 | YOU Y, WEI P, CAI J, et al. MISD-SLAM: multimodal semantic SLAM for dynamic environments[J]. Wireless Communications and Mobile Computing, 2022, 2022: No.7600669. |
| 12 | CAMPOS C, ELVIRA R, RODRÍGUEZ J J G, et al. ORB-SLAM3: an accurate open-source library for visual, visual-inertial, and multimap SLAM[J]. IEEE Transactions on Robotics, 2021, 37(6): 1874-1890. |
| 13 | LIU J, LI X, LIU Y, et al. RGB-D inertial odometry for a resource-restricted robot in dynamic environments[J]. IEEE Robotics and Automation Letters, 2022, 7(4): 9573-9580. |
| 14 | WEI S, LI Z. An RGB-D SLAM algorithm based on adaptive semantic segmentation in dynamic environment[J]. Journal of Real-Time Image Processing, 2023, 20: No.85. |
| 15 | YIN H, LI S, TAO Y, et al. Dynam-SLAM: an accurate, robust stereo visual-inertial SLAM method in dynamic environments[J]. IEEE Transactions on Robotics, 2023, 39(1): 289-308. |
| 16 | YUAN C, XU Y, ZHOU Q. PLDS-SLAM: point and line features SLAM in dynamic environment[J]. Remote Sensing, 2023, 15(7): No.1893. |
| 17 | 伍晓东,张松柏,汤适荣,等. 基于改进关键帧选择的 ORB-SLAM3算法[J]. 计算机应用研究, 2023, 40(5): 1428-1433. |
| WU X D, ZHANG S B, TANG S R, et al. Improved key-frame selection algorithm based on ORB-SLAM3[J]. Application Research of Computers, 2023, 40(5): 1428-1433. | |
| 18 | 陈孟元,丁陵梅,张玉坤. 基于改进关键帧选取策略的快速PL-SLAM算法[J]. 电子学报, 2022, 50(3): 608-618. |
| CHEN M Y, DING L M, ZHANG Y K. Fast PL-SLAM algorithm based on improved keyframe extraction strategy[J]. Acta Electronica Sinica, 2022, 50(3):608-618. | |
| 19 | MUR-ARTAL R, TARDÓS J D. ORB-SLAM2: an open-source SLAM system for monocular, stereo, and RGB-D cameras[J]. IEEE Transactions on Robotics, 2017, 33(5): 1255-1262. |
| 20 | STURM J, ENGELHARD N, ENDRES F, et al. A benchmark for the evaluation of RGB-D SLAM systems[C]// Proceedings of the 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. Piscataway: IEEE, 2012: 573-580. |
| 21 | 游通飞,孔令华,刘文玉,等. 视觉SLAM在动态场景下的图像处理方法[J]. 红外技术, 2021, 43(10): 960-967. |
| YOU T F, KONG L H, LIU W Y, et al. Image processing method for visual simultaneous localization and mapping in dynamic scene[J]. Infrared Technology, 2021, 43(10): 960-967. |
| [1] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [2] | 宋霄罡, 张冬冬, 张鹏飞, 梁莉, 黑新宏. 面向复杂施工环境的实时目标检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1605-1612. |
| [3] | 李鑫, 孟乔, 皇甫俊逸, 孟令辰. 基于分离式标签协同学习的YOLOv5多属性分类[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1619-1628. |
| [4] | 黄子杰, 欧阳, 江德港, 郭彩玲, 李柏林. 面向牵引座焊缝表面质量检测的轻量型深度学习算法[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 983-988. |
| [5] | 张成涵宇, 林钰哲, 谭程珂, 王俊帆, 顾烨婷, 董哲康, 高明煜. 基于轻量化YOLOv5的新型菜品识别网络[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 638-644. |
| [6] | 王朱佳, 余宙, 俞俊, 范建平. 基于多尺度时空Transformer的视频动态场景图生成模型[J]. 《计算机应用》唯一官方网站, 2024, 44(1): 47-57. |
| [7] | 段升位, 程欣宇, 王浩舟, 王飞. 基于改进的YOLOv5的大坝表面病害检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(8): 2619-2629. |
| [8] | 吕宗喆, 徐慧, 杨骁, 王勇, 王唯鉴. 面向小目标的YOLOv5安全帽检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(6): 1943-1949. |
| [9] | 朱周华, 齐琦. 基于改进YOLOv5s电动车头盔的自动检测与识别[J]. 《计算机应用》唯一官方网站, 2023, 43(4): 1291-1296. |
| [10] | 李佳东, 张丹普, 范亚琼, 杨剑锋. 基于改进YOLOv5的轻量级船舶目标检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 923-929. |
| [11] | 顾勇翔, 蓝鑫, 伏博毅, 秦小林. 基于几何适应与全局感知的遥感图像目标检测算法[J]. 《计算机应用》唯一官方网站, 2023, 43(3): 916-922. |
| [12] | 李文举, 张干, 崔柳, 储王慧. 基于坐标注意力的轻量级交通标志识别模型[J]. 《计算机应用》唯一官方网站, 2023, 43(2): 608-614. |
| [13] | 孙泽强, 陈炳才, 崔晓博, 王磊, 陆雅诺. 融合频域注意力机制和解耦头的YOLOv5带钢表面缺陷检测[J]. 《计算机应用》唯一官方网站, 2023, 43(1): 242-249. |
| [14] | 尹靖涵, 瞿绍军, 姚泽楷, 胡玄烨, 秦晓雨, 华璞靖. 基于YOLOv5的雾霾天气下交通标志识别模型[J]. 《计算机应用》唯一官方网站, 2022, 42(9): 2876-2884. |
| [15] | 张锦, 屈佩琪, 孙程, 罗蒙. 基于改进YOLOv5的安全帽佩戴检测算法[J]. 《计算机应用》唯一官方网站, 2022, 42(4): 1292-1300. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||