


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (3): 909-915.DOI: 10.11772/j.issn.1001-9081.2023040416
所属专题: 多媒体计算与计算机仿真
王伟, 赵春辉( ), 唐心瑶, 席刘钢
), 唐心瑶, 席刘钢
收稿日期:2023-04-13
修回日期:2023-06-30
接受日期:2023-07-05
发布日期:2023-12-04
出版日期:2024-03-10
通讯作者:
赵春辉
作者简介:王伟(1984—),男,江苏徐州人,讲师,博士,主要研究方向:计算机视觉、三维重建基金资助:
Wei WANG, Chunhui ZHAO(), Xinyao TANG, Liugang XI
Received:2023-04-13
Revised:2023-06-30
Accepted:2023-07-05
Online:2023-12-04
Published:2024-03-10
Contact:
Chunhui ZHAO
About author:WANG Wei, born in 1984,Ph. D., lecturer. His research interests include computer vision, 3D reconstruction.Supported by:摘要:
目前较为常用的基于单目视觉的车辆三维检测方法是目标检测结合几何约束的方法,但是几何约束中消失点的位置对结果影响很大。为了获取更加准确的约束条件,提出一种基于地平线检测的车辆三维检测算法。首先,利用车辆图片获取消失点的相对位置,将车辆图片预处理至合适大小;然后,将经过预处理的车辆图片送入消失点检测网络,获得消失点信息热力图组,回归出消失点信息,并计算得出地平线信息;最后,根据地平线信息构建几何约束,在约束空间内对车辆初始尺寸迭代优化计算精确的车辆三维信息。实验结果表明,所述地平线求解算法能够获得更准确的地平线,与随机森林的方法相比,曲线下面积(AUC)提升1.730个百分点;同时,所提地平线约束能够有效地限制车辆三维信息,与使用对角线和消失点约束的算法相比,车辆三维信息的平均精度提升2.201个百分点。可见地平线可以作为几何约束在路侧单目相机的场景下求解车辆三维信息。
中图分类号:
王伟, 赵春辉, 唐心瑶, 席刘钢. 自适应地平线约束下的车辆三维检测[J]. 计算机应用, 2024, 44(3): 909-915.
Wei WANG, Chunhui ZHAO, Xinyao TANG, Liugang XI. 3D vehicle detection with adaptive horizon line constraints[J]. Journal of Computer Applications, 2024, 44(3): 909-915.

图1 地平线约束下的车辆三维检测流程
Fig. 1 Flow of 3D vehicle detection based on horizon line constraint
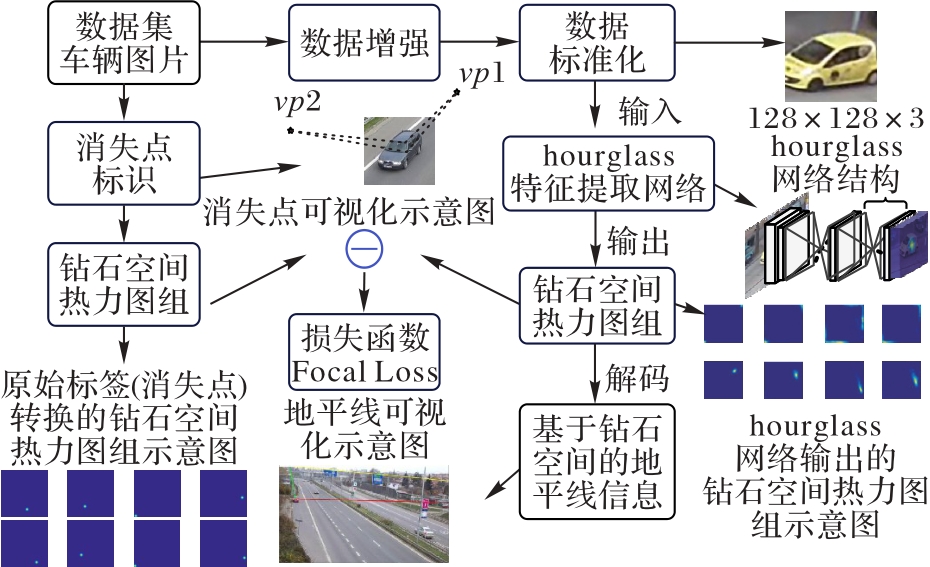
图2 自适应地平线检测网络训练流程
Fig. 2 Training flow of adaptive horizon line detection network
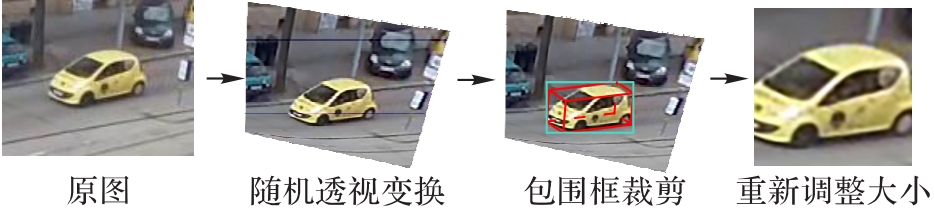
图3 图像预处理流程
Fig. 3 Image pre-processing flow

图4 交通场景标定
Fig. 4 Traffic scene calibration
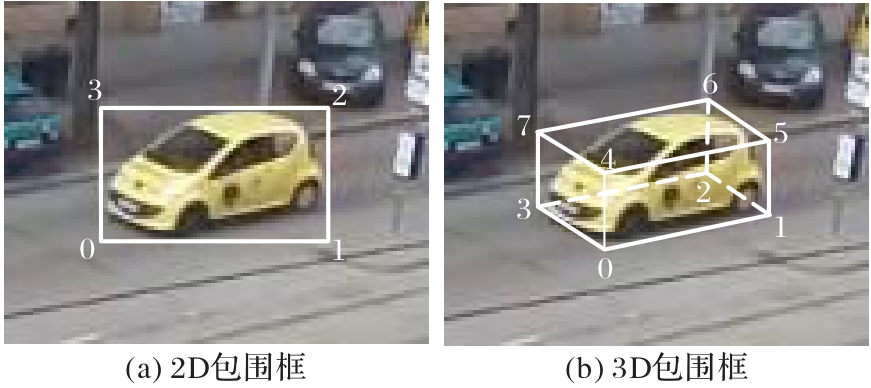
图5 车辆包围框
Fig. 5 Vehicle bounding boxes
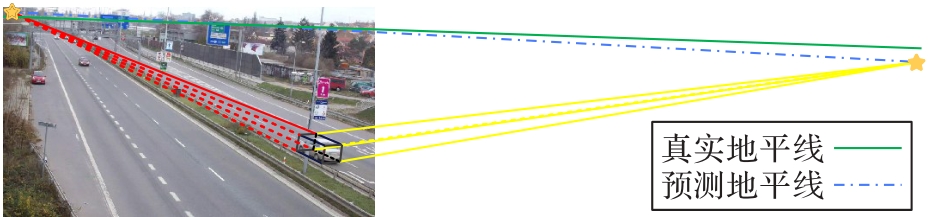
图6 地平线约束
Fig. 6 Horizon line constraint

图7 BoxCars116K数据集部分车辆图片
Fig. 7 Partial vehicle images in BoxCars116K dataset

图8 BrnoCompSpeed数据集部分视角图片
Fig. 8 Partial view images in BrnoCompSpeed dataset
| 实验 | 数据增强 | 尺度变换模块 | Focal Loss | 误差% |
|---|---|---|---|---|
| 基准实验 | × | × | × | 27.102 |
| 实验1 | √ | × | × | 25.991 |
| 实验2 | × | √ | × | 22.284 |
| 实验3 | × | × | √ | 21.505 |
| 实验4 | √ | √ | √ | 20.770 |
表1 消融实验结果
Tab. 1 Ablation experiments results
| 实验 | 数据增强 | 尺度变换模块 | Focal Loss | 误差% |
|---|---|---|---|---|
| 基准实验 | × | × | × | 27.102 |
| 实验1 | √ | × | × | 25.991 |
| 实验2 | × | √ | × | 22.284 |
| 实验3 | × | × | √ | 21.505 |
| 实验4 | √ | √ | √ | 20.770 |
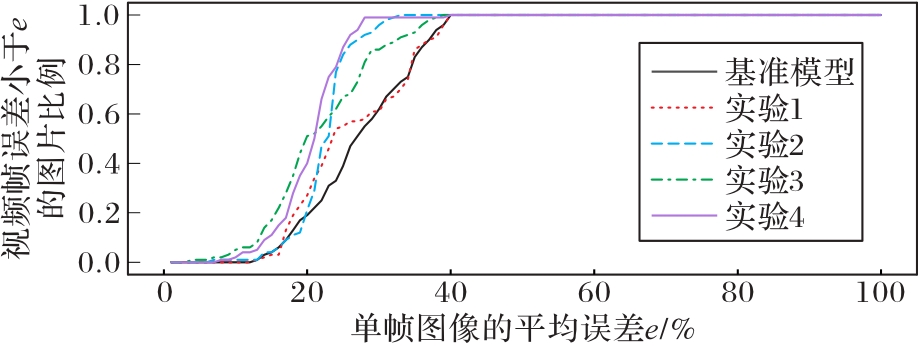
图9 消融实验累计误差AUC折线图
Fig. 9 AUC line chart of cumulative error in ablation experiments
| 算法 | AUC/% | 算法 | AUC/% |
|---|---|---|---|
| 文献[ | 77.500 | 本文算法 | 79.230 |
| 文献[ | 74.550 |
表2 不同地平线检测算法性能对比
Tab. 2 Performance comparison of different horizon lines detection algorithms
| 算法 | AUC/% | 算法 | AUC/% |
|---|---|---|---|
| 文献[ | 77.500 | 本文算法 | 79.230 |
| 文献[ | 74.550 |

图10 车辆三维检测实例
Fig. 10 Example of 3D vehicle detection
| 视角 | 长度误差/mm | 宽度误差/mm | 高度误差/mm | 精度/% |
|---|---|---|---|---|
| 平均值 | 204.719 | 131.258 | 169.313 | 92.201 |
| 左视角 | 162.392 | 125.189 | 158.641 | 94.106 |
| 中视角 | 260.774 | 118.560 | 149.292 | 90.845 |
| 右视角 | 190.990 | 149.995 | 200.005 | 91.652 |
表3 多视角车辆三维信息识别误差及精度
Tab. 3 Recognition error and accuracy of multi-view 3D vehicle information
| 视角 | 长度误差/mm | 宽度误差/mm | 高度误差/mm | 精度/% |
|---|---|---|---|---|
| 平均值 | 204.719 | 131.258 | 169.313 | 92.201 |
| 左视角 | 162.392 | 125.189 | 158.641 | 94.106 |
| 中视角 | 260.774 | 118.560 | 149.292 | 90.845 |
| 右视角 | 190.990 | 149.995 | 200.005 | 91.652 |
| 算法 | 传感器 | 几何约束 | 精度/% | 帧率/(frame·s-1) |
|---|---|---|---|---|
| 文献[ | 单目相机 | 无 | 89.05 | 33.7 |
| 文献[ | 单目相机 | 对角线、消失点 | 90.00 | 44.6 |
| 文献[ | 单目相机 | 俯视2D框 | 92.16 | 36.4 |
| 文献[ | 单目相机 | 车辆2D、3D框 | 90.72 | 43.0 |
| 本文算法 | 单目相机 | 对角线、地平线 | 92.20 | 45.7 |
表4 车辆三维检测算法结果对比
Tab. 4 Comparison of 3D vehicle detection algorithms
| 算法 | 传感器 | 几何约束 | 精度/% | 帧率/(frame·s-1) |
|---|---|---|---|---|
| 文献[ | 单目相机 | 无 | 89.05 | 33.7 |
| 文献[ | 单目相机 | 对角线、消失点 | 90.00 | 44.6 |
| 文献[ | 单目相机 | 俯视2D框 | 92.16 | 36.4 |
| 文献[ | 单目相机 | 车辆2D、3D框 | 90.72 | 43.0 |
| 本文算法 | 单目相机 | 对角线、地平线 | 92.20 | 45.7 |
| 1 | CHEN X, KUN K, ZHANG Z, et al. Monocular 3D object detection for autonomous driving [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 2147-2156. 10.1109/cvpr.2016.236 |
| 2 | 张毅, 姚丹亚, 李力, 等. 智能车路协同系统关键技术与应用[J]. 交通运输系统工程与信息,2021,21(5): 40-51. 10.16097/j.cnki.1009-6744.2021.05.005 |
| ZHANG Y, YAO D Y, LI L, et al. Technologies and applications for intelligent vehicle-infrastructure cooperation systems [J]. Journal of Transportation Systems Engineering and Information Technology, 2021, 21(5): 40-51. 10.16097/j.cnki.1009-6744.2021.05.005 | |
| 3 | CHABOT F, CHAOUCH M, RABARISOA J, et al. Deep MANTA: A coarse-to-fine many-task network for joint 2D and 3D vehicle analysis from monocular image [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 2040-2049. 10.1109/cvpr.2017.198 |
| 4 | 毛河. 基于机器视觉的辅助驾驶系统中预警系统设计[D].成都: 电子科技大学, 2014:8-13. |
| MAO H. Anti-collision warning system in advanced driver assistance system based on machine vision[D]. Chengdu: University of Electronic Science and Technology of China, 2014:8-13. | |
| 5 | 顾德英, 张松, 孟范伟. 基于单目视觉的车辆3D空间检测方法[J]. 东北大学学报(自然科学版), 2022,43(3):328-334. |
| GU D Y, ZHANG S, MENG F W. Vehicle 3D space detection method based on monocular vision [J]. Journal of Northeastern University (Natural Science), 2022, 43(3):328-334. | |
| 6 | ZHANG Z, TAN T, HUANG K, et al. Three-dimensional deformable-model-based localization and recognition of road vehicles[J]. IEEE Transactions on Image Processing, 2012, 21(1):1-13. 10.1109/tip.2011.2160954 |
| 7 | PROKAJ J, MEDIONI G. 3-D model based vehicle recognition[C]// Proceeding of the 2009 Workshop on Applications of Computer Vision. Piscataway: IEEE, 2009: 1-7. 10.1109/wacv.2009.5403032 |
| 8 | 唐心瑶, 宋焕生, 王伟,等. 单目交通场景下基于自标定的车辆三维信息识别算法[J]. 计算机辅助设计与图形学学报, 2020, 32(8):1305-1314. 10.3724/sp.j.1089.2020.18041 |
| TANG X Y, SONG H S, WANG W, et al. 3D vehicle information recognition algorithm of monocular camera based on self-calibration in traffic scene [J]. Journal of Computer-Aided Design & Computer Graphics, 2020, 32(8):1305-1314. 10.3724/sp.j.1089.2020.18041 | |
| 9 | CHEN Y, LIU F, PEI K. Monocular vehicle 3D bounding box estimation using homograhy and geometry in traffic scene [C]// Proceedings of 2022 IEEE International Conference on Acoustics, Speech and Signal Processing. Piscataway: IEEE, 2022: 1995-1999. 10.1109/icassp43922.2022.9747512 |
| 10 | SOCHOR J, JURÁNEK R, HEROUT A. Traffic surveillance camera calibration by 3D model bounding box alignment for accurate vehicle speed measurement [J]. Computer Vision and Image Understanding, 2017, 161: 87-98. 10.1016/j.cviu.2017.05.015 |
| 11 | JEONG C, YANG H S, MOON K D. A novel approach for detecting the horizon using a convolutional neural network and multi-scale edge detection [J]. Multidimensional Systems and Signal Processing, 2019, 30(3): 1187-1204. 10.1007/s11045-018-0602-4 |
| 12 | AHMAD T, BEBIS G, NICOLESCU M, et al. Horizon line detection using supervised learning and edge cues [J]. Computer Vision and Image Understanding, 2020, 191:102879. 10.1016/j.cviu.2019.102879 |
| 13 | XU Y, YAN H, MA Y, et al. Graph-based horizon line detection for UAV navigation [J]. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 2021, 14: 11683-11698. 10.1109/jstars.2021.3126586 |
| 14 | 叶继华, 时淑霞, 李汉曦, 等. 一种结合深度学习和随机森林的地平线检测方法[J]. 系统仿真学报,2018,30(7): 2507-2514. 10.16182/j.issn1004731x.joss.201807010 |
| YE J H, SHI S X, LI H X, et al. A horizon detection method based on deep learning and random forest [J]. Journal of System Simulation, 2018, 30(7): 2507-2514. 10.16182/j.issn1004731x.joss.201807010 | |
| 15 | DONG L, MA D, MA D, et al. Fast infrared horizon detection algorithm based on gradient directional filtration [J]. Journal of the Optical Society of America A, 2020, 37(11): 1795-1805. 10.1364/josaa.402620 |
| 16 | KLUGER F, ACKERMANN H, YANG M Y, et al. Temporally consistent horizon lines [C]// Proceedings of the 2020 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2020: 3161-3167. 10.1109/icra40945.2020.9197170 |
| 17 | 陈星, 张文海, 杨林,等. 结合立体视觉的非结构化道路消失点检测研究[J]. 西北工业大学学报, 2022, 40(6):1431-1439. 10.1051/jnwpu/20224061431 |
| CHEN X, ZHANG W H, YANG L,et al. Research on vanishing point detection of unstructured road scene combined with stereo vision [J]. Journal of Northwestern Polytechnical University, 2022, 40(6):1431-1439. 10.1051/jnwpu/20224061431 | |
| 18 | KOCUR V, FTÀČNIK M. Traffic camera calibration via vehicle vanishing point detection [C]// Proceedings of the 30th International Conference on Artificial Neural Networks. Cham: Springer, 2021: 628-639. 10.1007/978-3-030-86383-8_50 |
| 19 | NEWELL A, YANG K, DENG J. Stacked hourglass networks for human pose estimation [C]// Proceedings of the 14th European Conference on Computer Vision. Cham: Springer, 2016: 483-499. 10.1007/978-3-319-46484-8_29 |
| 20 | HARTLEY R, ZISSERMAN A. 计算机视觉中的多视图几何[M]. 韦穗,杨尚骏,章权兵,等译. 合肥:安徽大学出版社, 2002:63-66. |
| HARTLEY R, ZISSERMAN A. Multiview geometry in computer vision [M]. WEI S, YANG S J, ZHANG Q B, translated. Hefei: Anhui University Press, 2002:63-66. | |
| 21 | KANHERE N K, BIRCHFIELD S T. A taxonomy and analysis of camera calibration methods for traffic monitoring applications [J]. IEEE Transactions on Intelligent Transportation Systems, 2010, 11(2):441-452. 10.1109/tits.2010.2045500 |
| 22 | DUBSKÁ M, HEROUT A. Real projective plane mapping for detection of orthogonal vanishing points [C]// Proceedings of the 2013 British Machine Vision Conference. Bristol: British Machine Vision Association, 2013: 1-10. 10.5244/c.27.90 |
| 23 | LIN T-Y, GOYAL P, GIRSHICK R, et al. Focal loss for dense object detection [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE. 2017: 2999-3007. 10.1109/iccv.2017.324 |
| 24 | SOCHOR J, ŠPAŇHEL J, HEROUT A. BoxCars: Improving fine-grained recognition of vehicles using 3-D bounding boxes in traffic surveillance [J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(1): 97-108. 10.1109/tits.2018.2799228 |
| 25 | SOCHOR J, JURÁNEK R, ŠPAŇHEL J, et al. BrnoCompSpeed: Review of traffic camera calibration and comprehensive dataset for monocular speed measurement [EB/OL]. [2023-06-20]. . 10.1109/tits.2018.2825609 |
| 26 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. 10.1109/cvpr.2016.90 |
| [1] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [2] | 张英俊, 李牛牛, 谢斌红, 张睿, 陆望东. 课程学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2326-2333. |
| [3] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [4] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [5] | 孙逊, 冯睿锋, 陈彦如. 基于深度与实例分割融合的单目3D目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2208-2215. |
| [6] | 姬张建, 杜娜. 基于改进VariFocalNet的微小目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2200-2207. |
| [7] | 刘越, 刘芳, 武奥运, 柴秋月, 王天笑. 基于自注意力机制与图卷积的3D目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1972-1977. |
| [8] | 邓亚平, 李迎江. YOLO算法及其在自动驾驶场景中目标检测综述[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1949-1958. |
| [9] | 耿焕同, 刘振宇, 蒋骏, 范子辰, 李嘉兴. 基于改进YOLOv8的嵌入式道路裂缝检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1613-1618. |
| [10] | 宋霄罡, 张冬冬, 张鹏飞, 梁莉, 黑新宏. 面向复杂施工环境的实时目标检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1605-1612. |
| [11] | 李鸿天, 史鑫昊, 潘卫国, 徐成, 徐冰心, 袁家政. 融合多尺度和注意力机制的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1437-1444. |
| [12] | 陈天华, 朱家煊, 印杰. 基于注意力机制的鸟类识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1114-1120. |
| [13] | 郑宇亮, 陈云华, 白伟杰, 陈平华. 融合事件数据和图像帧的车辆目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 931-937. |
| [14] | 李新叶, 侯晔凝, 孔英会, 燕志旗. 结合特征融合与增强注意力的少样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 745-751. |
| [15] | 李雨秋, 侯利萍, 薛健, 吕科, 王泳. 基于内容解译的遥感图像推荐方法[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 722-731. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||