


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (6): 1949-1958.DOI: 10.11772/j.issn.1001-9081.2023060889
邓亚平, 李迎江( )
)
收稿日期:2023-07-07
修回日期:2023-08-20
接受日期:2023-08-24
发布日期:2023-09-11
出版日期:2024-06-10
通讯作者:
李迎江
作者简介:邓亚平(2000—),女,重庆人,硕士研究生,CCF会员,主要研究方向:目标检测、图像处理;
基金资助:Received:2023-07-07
Revised:2023-08-20
Accepted:2023-08-24
Online:2023-09-11
Published:2024-06-10
Contact:
Yingjiang LI
About author:DENG Yaping, born in 2000, M. S. candidate, Her research interests include object detection, image processing.
Supported by:摘要:
自动驾驶场景下的目标检测是计算机视觉中重要研究方向之一,确保自动驾驶汽车对物体进行实时准确的目标检测是研究重点。近年来,深度学习技术迅速发展并被广泛应用于自动驾驶领域中,极大促进了自动驾驶领域的进步。为此,针对YOLO(You Only Look Once)算法在自动驾驶领域中的目标检测研究现状,从以下4个方面分析。首先,总结单阶段YOLO系列检测算法思想及其改进方法,分析YOLO系列算法的优缺点;其次,论述YOLO算法在自动驾驶场景下目标检测中的应用,从交通车辆、行人和交通信号识别这3个方面分别阐述和总结研究现状及应用情况;此外,总结目标检测中常用的评价指标、目标检测数据集和自动驾驶场景数据集;最后,展望目标检测存在的问题和未来发展方向。
中图分类号:
邓亚平, 李迎江. YOLO算法及其在自动驾驶场景中目标检测综述[J]. 计算机应用, 2024, 44(6): 1949-1958.
Yaping DENG, Yingjiang LI. Review of YOLO algorithm and its applications to object detection in autonomous driving scenes[J]. Journal of Computer Applications, 2024, 44(6): 1949-1958.
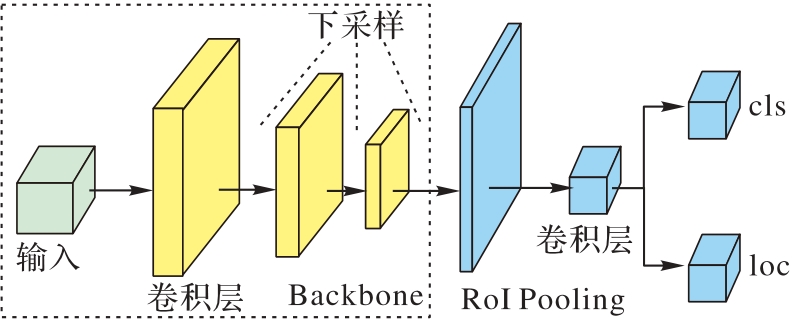
图1 单阶段目标检测的通用架构
Fig.1 Generic architecture of single-stage object detection
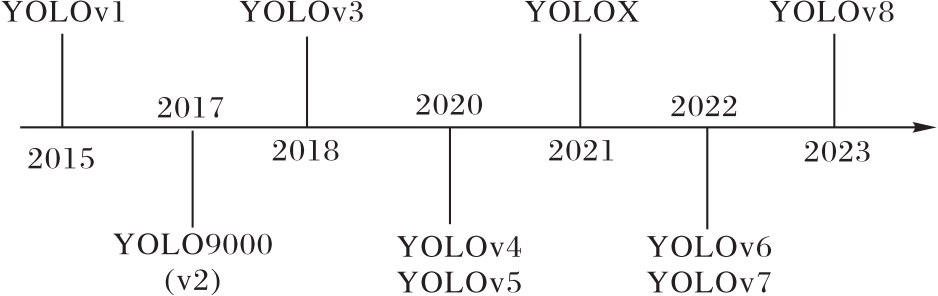
图2 YOLO版本时间线
Fig. 2 YOLO version timeline
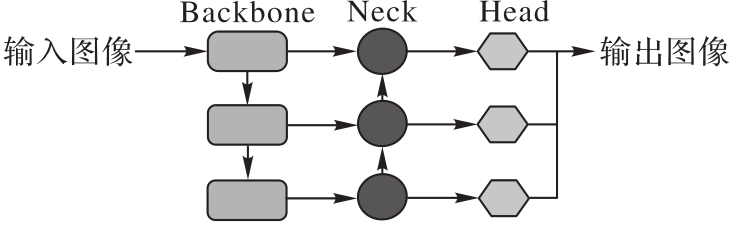
图3 现代目标检测器的架构
Fig.3 Architecture of modern object detector
| 检测框架 | 检测基准 | 输入尺寸 | FPS | AP/% | AP50/% |
|---|---|---|---|---|---|
| YOLOv1 | PASCAL VOC2007 | 448 | 63.4 | ||
| YOLOv2 | PASCAL VOC2007 | 416 | 78.6 | ||
| YOLOv3 | COCO test2017 | 416 | 35 | 31.0 | 55.3 |
| YOLOv4 | COCO test2017 | 608 | 65 | 43.5 | 65.7 |
| YOLOv5s | COCO test2017 | 640 | 170 | 41.2 | 55.4 |
| YOLOX-L | Tesla V100 | 640 | 94 | 49.7 | 68.0 |
| YOLOv6-L | COCO test2017 | 640 | 98 | 52.8 | 70.3 |
| YOLOv7-E6 | COCO test2017 | 1 280 | 16 | 56.8 | 74.4 |
| YOLOv8-L | COCO test2017 | 640 | 91 | 53.9 | 69.8 |
表1 不同YOLO版本的检测结果
Tab. 1 Detection results of different YOLO versions
| 检测框架 | 检测基准 | 输入尺寸 | FPS | AP/% | AP50/% |
|---|---|---|---|---|---|
| YOLOv1 | PASCAL VOC2007 | 448 | 63.4 | ||
| YOLOv2 | PASCAL VOC2007 | 416 | 78.6 | ||
| YOLOv3 | COCO test2017 | 416 | 35 | 31.0 | 55.3 |
| YOLOv4 | COCO test2017 | 608 | 65 | 43.5 | 65.7 |
| YOLOv5s | COCO test2017 | 640 | 170 | 41.2 | 55.4 |
| YOLOX-L | Tesla V100 | 640 | 94 | 49.7 | 68.0 |
| YOLOv6-L | COCO test2017 | 640 | 98 | 52.8 | 70.3 |
| YOLOv7-E6 | COCO test2017 | 1 280 | 16 | 56.8 | 74.4 |
| YOLOv8-L | COCO test2017 | 640 | 91 | 53.9 | 69.8 |
| 应用 | 文献序号 | 算法 | 主要改进方式 | AP/ % | mAP/% | FPS |
|---|---|---|---|---|---|---|
2D 目标 | [ | Edge YOLO | 基于边云协作和 重构 | 47.30 | 26.60 | |
| [ | YOLOv3 | 引入SPP模块和 Soft-NMS | 95.92 | 25.00 | ||
| [ | YOLOv5 | 使用多尺度机制 | 96.34 | 30.00 | ||
| [ | YOLOv4- tiny | 设计D-CSPNet和 SPP | 70.36 | 117.50 | ||
| [ | YOLOv3 | 使用GIoU 损失函数 | 60.90 | |||
3D 目标 | [ | YOLOv2 | 设计E-RPN | 67.72 | 50.40 | |
| [ | Complex- YOLO | 引入SRT | 55.63 | 15.60 | ||
| [ | YOLOv3 | 引入3D空间 | 44.35 | |||
| [ | YOLOv2 | 75.30 | 40.00 |
表2 YOLO算法在交通车辆检测中的应用
Tab.2 Application of YOLO algorithms in traffic vehicle detection
| 应用 | 文献序号 | 算法 | 主要改进方式 | AP/ % | mAP/% | FPS |
|---|---|---|---|---|---|---|
2D 目标 | [ | Edge YOLO | 基于边云协作和 重构 | 47.30 | 26.60 | |
| [ | YOLOv3 | 引入SPP模块和 Soft-NMS | 95.92 | 25.00 | ||
| [ | YOLOv5 | 使用多尺度机制 | 96.34 | 30.00 | ||
| [ | YOLOv4- tiny | 设计D-CSPNet和 SPP | 70.36 | 117.50 | ||
| [ | YOLOv3 | 使用GIoU 损失函数 | 60.90 | |||
3D 目标 | [ | YOLOv2 | 设计E-RPN | 67.72 | 50.40 | |
| [ | Complex- YOLO | 引入SRT | 55.63 | 15.60 | ||
| [ | YOLOv3 | 引入3D空间 | 44.35 | |||
| [ | YOLOv2 | 75.30 | 40.00 |
| 应用 | 文献序号 | 算法 | 主要改进方式 | AP/% | mAP/% | FPS |
|---|---|---|---|---|---|---|
| 小尺寸 | [ | YOLOv5 | 设计Grey-C3模块 | 91.80 | ||
| [ | YOLOv3 | 引入 ratio-aware机制 | 74.20 | |||
| [ | YOLOv4 | 采用小波变换 | 95.63 | |||
| 遮挡 | [ | YOLOv7 | 修改骨干网络 | 89.75 | ||
| [ | YOLOv3 | 采用SPP和 剪枝方法 | 93.80 | 94.20 | 50.0 | |
| [ | YOLOv4 | 设计空间金字塔 卷积洗牌模块 | 94.11 | |||
多模态 识别 | [ | YOLOv3 | 设计多模态 注意力模块 | |||
| [ | YOLOv3 | 融合可见光和 红外光 | 92.60 | 19.8 |
表3 YOLO算法在行人识别中的应用
Tab. 3 Application of YOLO algorithms in pedestrian recognition
| 应用 | 文献序号 | 算法 | 主要改进方式 | AP/% | mAP/% | FPS |
|---|---|---|---|---|---|---|
| 小尺寸 | [ | YOLOv5 | 设计Grey-C3模块 | 91.80 | ||
| [ | YOLOv3 | 引入 ratio-aware机制 | 74.20 | |||
| [ | YOLOv4 | 采用小波变换 | 95.63 | |||
| 遮挡 | [ | YOLOv7 | 修改骨干网络 | 89.75 | ||
| [ | YOLOv3 | 采用SPP和 剪枝方法 | 93.80 | 94.20 | 50.0 | |
| [ | YOLOv4 | 设计空间金字塔 卷积洗牌模块 | 94.11 | |||
多模态 识别 | [ | YOLOv3 | 设计多模态 注意力模块 | |||
| [ | YOLOv3 | 融合可见光和 红外光 | 92.60 | 19.8 |
| 应用 | 文献序号 | 算法 | 主要改进方式 | AP/ % | mAP/ % | FPS |
|---|---|---|---|---|---|---|
交通 标志 | [ | YOLOv5 | 替换结构参数 | |||
| [ | YOLOv3 | 融合VGG 网络模型 | 90.00 | |||
| [ | YOLOv7 | SIoU损失函数和 注意力机制 | 70.84 | |||
| 遮挡 | [ | YOLOv3 | 修改结构参数 | 88.39 | 29.30 | |
| [ | YOLOv3 | 修改网络结构 | 88.39 | |||
| [ | YOLOv8 | 设计多层感知器的 拓扑预测头 | ||||
多模态 识别 | [ | YOLOv2 | 90.49 | |||
| [ | YOLOv5 | 修改骨干网络 | 74.30 | 111.00 | ||
| [ | YOLOv3 | 精简网络结构 | 46.78 | 33.00 |
表4 YOLO算法在交通信号检测中的应用
Tab. 4 Application of YOLO algorithms in traffic signal detection
| 应用 | 文献序号 | 算法 | 主要改进方式 | AP/ % | mAP/ % | FPS |
|---|---|---|---|---|---|---|
交通 标志 | [ | YOLOv5 | 替换结构参数 | |||
| [ | YOLOv3 | 融合VGG 网络模型 | 90.00 | |||
| [ | YOLOv7 | SIoU损失函数和 注意力机制 | 70.84 | |||
| 遮挡 | [ | YOLOv3 | 修改结构参数 | 88.39 | 29.30 | |
| [ | YOLOv3 | 修改网络结构 | 88.39 | |||
| [ | YOLOv8 | 设计多层感知器的 拓扑预测头 | ||||
多模态 识别 | [ | YOLOv2 | 90.49 | |||
| [ | YOLOv5 | 修改骨干网络 | 74.30 | 111.00 | ||
| [ | YOLOv3 | 精简网络结构 | 46.78 | 33.00 |
| 检测目标 | 数据集名称 | 数据集介绍 | 来源 |
|---|---|---|---|
交通 车辆 | KITTI[ | 可用于目标检测、跟踪和语义分割等 | 德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合 |
| nuScenes[ | 包含图像、激光雷达扫码数据和雷达数据,是具有3D信息的数据集 | Aptiv公司 | |
| Waymo open[ | 大规模自动驾驶数据集,含3种不同道路场景的数据 | Waymo公司 | |
| ApolloScape[ | 用于目标检测、语义分割和深度估计等,含3D信息 | 中国百度公司 | |
| BDD100K[ | 当前最大自动驾驶场景数据集 | 加利福尼亚大学伯克利分校 | |
| 行人 | ETH[ | 用于行人检测,由安装在汽车上的立体装置捕获图像,测试集来自3个视频剪辑的1 804张图像 | 苏黎世联邦理工学院 |
| INRIA[ | 一般用于静态行人检测,含有3 500多图像 | 法国国家计算机与自动化研究所 | |
交通 标志 | LISA[ | 不同相机采集的47种美国交通标志的图像和视频 | 德国卡尔斯鲁厄理工学院 |
| TT100K[ | 用于检测交通标志,共10万张图像含有3万个交通标志实例 | 清华和腾讯联合 |
表5 常见自动驾驶场景检测数据集
Tab. 5 Common autonomous driving scene detection datasets
| 检测目标 | 数据集名称 | 数据集介绍 | 来源 |
|---|---|---|---|
交通 车辆 | KITTI[ | 可用于目标检测、跟踪和语义分割等 | 德国卡尔斯鲁厄理工学院和丰田美国技术研究院联合 |
| nuScenes[ | 包含图像、激光雷达扫码数据和雷达数据,是具有3D信息的数据集 | Aptiv公司 | |
| Waymo open[ | 大规模自动驾驶数据集,含3种不同道路场景的数据 | Waymo公司 | |
| ApolloScape[ | 用于目标检测、语义分割和深度估计等,含3D信息 | 中国百度公司 | |
| BDD100K[ | 当前最大自动驾驶场景数据集 | 加利福尼亚大学伯克利分校 | |
| 行人 | ETH[ | 用于行人检测,由安装在汽车上的立体装置捕获图像,测试集来自3个视频剪辑的1 804张图像 | 苏黎世联邦理工学院 |
| INRIA[ | 一般用于静态行人检测,含有3 500多图像 | 法国国家计算机与自动化研究所 | |
交通 标志 | LISA[ | 不同相机采集的47种美国交通标志的图像和视频 | 德国卡尔斯鲁厄理工学院 |
| TT100K[ | 用于检测交通标志,共10万张图像含有3万个交通标志实例 | 清华和腾讯联合 |
| 1 | ZOU Z, CHEN K, SHI Z, et al. Object detection in 20 years: a survey [J]. Proceedings of the IEEE, 2023, 111(3): 257-276. |
| 2 | ZHAO Z-Q, ZHENG P, XU S-T, et al. Object detection with deep learning: a review [J]. IEEE Transactions on Neural Networks and Learning Systems, 2019, 30(11): 3212-3232. |
| 3 | VIOLA P, JONES M. Rapid object detection using a boosted cascade of simple features [C]// Proceedings of the 2001 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2001, 1: I-511 - I-518. |
| 4 | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection [C]// Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2005, 1: 886-893. |
| 5 | FELZENSZWALB P, McALLESTER D, RAMANAN D. A discriminatively trained, multiscale, deformable part model [C]// Proceedings of the 2008 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2008: 1-8. |
| 6 | 曹家乐,李亚利,孙汉卿,等. 基于深度学习的视觉目标检测技术综述[J]. 中国图象图形学报, 2022, 27(6): 1697-1722. |
| CAO J L, LI Y L, SUN H Q, et al. A survey on deep learning based visual object detection [J]. Journal of Image and Graphics, 2022, 27(6): 1697-1722. | |
| 7 | DIWAN T, ANIRUDH G, TEMBHURNE J V. Object detection using YOLO: challenges, architectural successors, datasets and applications [J]. Multimedia Tools and Applications, 2022, 82(6): 9243-9275. |
| 8 | GIRSHICK R, DONAHUE J, DARRELL T, et al. Rich feature hierarchies for accurate object detection and semantic segmentation [C]// Proceedings of the 2014 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2014: 580-587. |
| 9 | REN S, HE K, GIRSHICK R, et al. Faster R-CNN: towards real-time object detection with region proposal networks [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2017, 39(6): 1137-1149. |
| 10 | HE K, GKIOXARI G, DOLLÁR P, et al. Mask R-CNN [C]// Proceedings of the 2017 IEEE International Conference on Computer Vision. Piscataway: IEEE, 2017: 2980-2988. |
| 11 | REDMON J, DIVVALA S, GIRSHICK R, et al. You only look once: unified, real-time object detection [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 779-788. |
| 12 | LIU W, ANGUELOV D, ERHAN D, et al. SSD: single shot MultiBox detector [C]// Proceedings of the 14th European Conference on Computer Vision. Cham: Springer, 2016: 21-37. |
| 13 | ZHU X, SU W, LU L, et al. Deformable DETR: deformable transformers for end-to-end object detection [EB/OL]. (2020-10-08) [2023-05-23]. . |
| 14 | REZATOFIGHI H, TSOI N, GWAK J Y, et al. Generalized intersection over union: a metric and a loss for bounding box regression [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2019: 658-666. |
| 15 | NEUBECK A, VAN GOOL L. Efficient non-maximum suppression [C]// Proceedings of the 18th International Conference on Pattern Recognition. Piscataway: IEEE, 2006: 850-855. |
| 16 | GUO J, HAN K, WANG Y, et al. Hit-detector: hierarchical trinity architecture search for object detection [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11402-11411. |
| 17 | SZEGEDY C, LIU W, JIA Y, et al. Going deeper with convolutions [C]// Proceedings of the 2015 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2015: 1-9. |
| 18 | MASS A L, HANNUN A Y, NG A Y. Rectifier nonlinearities improve neural network acoustic models [EB/OL].[2023-05-30]. . |
| 19 | REDMON J, FARHADIA. YOLO9000: better, faster, stronger [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 6517-6525. |
| 20 | SIMONYAN K, ZISSERMAN A. Very deep convolutional networks for large-scale image recognition [EB/OL]. (2014-05-01) [2023-05-29]. . |
| 21 | LIN M, CHEN Q, YAN S. Network in network [EB/OL]. (2013-12-16) [2023-05-29]. . |
| 22 | REDMON J, FARHADI A. YOLOv3: an incremental improvement [EB/OL]. (2018-04-08) [2023-05-29]. . |
| 23 | HE K, ZHANG X, REN S, et al. Deep residual learning for image recognition [C]// Proceedings of the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 770-778. |
| 24 | LIN T-Y, DOLLΆR P, GIRSHICK R, et al. Feature pyramid networks for object detection [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2017: 936-944. |
| 25 | BOCHKOVSKIY A, WANG C-Y, LIAO H-Y M. YOLOv4: optimal speed and accuracy of object detection [EB/OL]. (2020-04-23) [2023-05-29]. . |
| 26 | ZHENG Z, WANG P, LIU W, et al. Distance-IoU loss: faster and better learning for bounding box regression [EB/OL]. (2019-11-19) [2023-08-07]. . |
| 27 | MISRA D. Mish: a self regularized non-monotonic activation function [EB/OL]. (2019-08-23) [2023-05-29]. . |
| 28 | WANG C-Y, LIAO H_Y M, WU Y-H, et al. CSPNet: a new backbone that can enhance learning capability of CNN [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2020: 1571-1580. |
| 29 | LIU S, QI L, QIN H, et al. Path aggregation network for instance segmentation [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2018: 8759-8768. |
| 30 | HE K, ZHANG X, REN S, et al. Spatial pyramid pooling in deep convolutional networks for visual recognition [J]. IEEE Transactions on Pattern Analysis and Machine Intelligence, 2015, 37(9): 1904-1916. |
| 31 | NELSON J, SOLAWETZ J. YOLOv5 is here: state-of-the-art object detection at 140 FPS [EB/OL]. (2020-06-10) [2023-05-30]. . |
| 32 | GE Z, LIU S, WANG F, et al. YOLOX: exceeding YOLO series in 2021 [EB/OL]. (2021-07-18) [2023-05-30]. . |
| 33 | LAW H, DENG J. CornerNet: detecting objects as paired keypoints [C]// Proceedings of the 15th European Conference on Computer Vision. Cham: Springer, 2018: 765-781. |
| 34 | DUAN K, BAI S, XIE L, et al. CenterNet: keypoint triplets for object detection [C]// Proceedings of the 2019 IEEE/CVF International Conference on Computer Vision. Piscataway: IEEE, 2019: 6568-6577. |
| 35 | ZHANG H, CISSE M, DAUPHIN Y N, et al. Mixup: beyond empirical risk minimization [EB/OL]. (2017-10-25) [2023-05-30]. . |
| 36 | GE Z, LIU S, LI Z, et al. OTA: optimal transport assignment for object detection [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 303-312. |
| 37 | LI C, LI L, JIANG H, et al. YOLOv6: a single-stage object detection framework for industrial applications [EB/OL]. (2022-09-07) [2023-06-01]. . |
| 38 | DING X, ZHANG X, MA N, et al. RepVGG: making VGG-style ConvNets great again [C]// Proceedings of the 2021 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2021: 13728-13737. |
| 39 | GEVORGYAN Z. SIoU loss: more powerful learning for bounding box regression [EB/OL]. (2022-05-25) [2023-06-01]. . |
| 40 | WANG C-Y, BOCHKOVSKIY A, LIAO H-Y M. YOLOv7: trainable bag-of-freebies sets new state-of-the-art for real-time object detectors [EB/OL]. (2022-07-06) [2023-06-01]. . |
| 41 | SOLAWETZ J, FRANCESCO. What is YOLOv8? The ultimate guide [EB/OL]. (2023-01-11) [2023-06-02]. . |
| 42 | LIANG S, WU H, ZHEN L, et al. Edge YOLO: real-time intelligent object detection system based on edge-cloud cooperation in autonomous vehicles [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(12): 25345-25360. |
| 43 | MAO Q-C, SUN H-M, ZUO L-Q, et al. Finding every car: a traffic surveillance multi-scale vehicle object detection method [J]. Applied Intelligence, 2020, 50: 3125-3136. |
| 44 | CARRASCO D P, RASHWAN H A, GARCÍA M Á, et al. T-YOLO: tiny vehicle detection based on YOLO and multi-scale convolutional neural networks [J]. IEEE Access, 2023, 11: 22430-22440. |
| 45 | LI Y, DING H, HU P, et al. Real-time detection algorithm for non-motorized vehicles based on D-YOLO model [J/OL]. Multimedia Tool and Applications (2023-01-25) [2023-08-07]. . |
| 46 | 叶佳林,苏子毅,马浩炎,等.改进YOLOv3的非机动车检测与识别方法[J].计算机工程与应用,2021,57(1):194-199. |
| YE J L, SU Z Y, MA H Y, et al. Improved YOLOv3 non-motor vehicles detection and recognition method [J]. Computer Engineering and Applications, 2021,57(1):194-199. | |
| 47 | ARNOLD E, Al-JARRAH O Y, DIANATI M, et al. A survey on 3D object detection methods for autonomous driving applications [J]. IEEE Transactions on Intelligent Transportation Systems, 2019, 20(10): 3782-3795. |
| 48 | SIMON M, MILZ S, AMENDE K, et al. Complex-YOLO: real-time 3D object detection on point clouds [EB/OL]. (2018-09-24) [2023-06-14]. . |
| 49 | SIMON M, AMENDE K, KARUS A, et al. Complexer-YOLO: real-time 3D object detection and tracking on semantic point clouds [C]// Proceedings of the 2019 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2019:1190-1199. |
| 50 | TAKAHASHI M, JI Y, UMEDA K, et al. Expandable YOLO: 3D object detection from RGB-D images [C]// Proceedings of the 2020 21st International Conference on Research and Education in Mechatronics. Piscataway: IEEE, 2020: 1-5. |
| 51 | ALI W, ABDELKARIM S, ZIDAN M, et al. YOLO3D: end-to-end real-time 3D oriented object bounding box detection from LiDAR point cloud [C]// Proceedings of the 15th European Conference on Computer Vision Workshops. Cham: Springer, 2018: 716-728. |
| 52 | XU L, YAN W, JI J. The research of a novel WOG-YOLO algorithm for autonomous driving object detection [J]. Scientific Reports, 2023, 13(1): 3699. |
| 53 | HSU W-Y, LIN W-Y. Ratio-and-scale-aware YOLO for pedestrian detection [J]. IEEE Transactions on Image Processing, 2020, 30: 934-947. |
| 54 | HSU W-Y, CHEN P-C. Pedestrian detection using stationary wavelet dilated residual super-resolution [J]. IEEE Transactions on Instrumentation and Measurement, 2022, 71: 5001411. |
| 55 | LI C, WANG Y, LIU X. An improved YOLOv7 lightweight detection algorithm for obscured pedestrians [J]. Sensors, 2023, 23(13): 5912. |
| 56 | 刘丽, 郑洋, 付冬梅. 改进 YOLOv3 网络结构的遮挡行人检测算法[J]. 模式识别与人工智能, 2020, 33(6): 568-574. |
| LIU L, ZHENG Y, FU D M. Improved YOLOv3 network structure occluded pedestrian detection algorithm [J]. Pattern Recognition and Artificial Intelligence, 2020, 33(6): 568-574. | |
| 57 | LI X, HE M, LIU Y, et al. SPCS: a spatial pyramid convolutional shuffle module for YOLO to detect occluded object [J]. Complex & Intelligent Systems, 2023, 9: 301-315. |
| 58 | XUE Y, JU Z, LI Y, et al. MAF-YOLO: multi-modal attention fusion based YOLO for pedestrian detection [J]. Infrared Physics & Technology, 2021, 118: 103906. |
| 59 | 施政,毛力,孙俊.基于YOLO的多模态加权融合行人检测算法[J].计算机工程,2021,47(8):234-242. |
| SHI Z, MAO L, SUN J. YOLO-based Multi-modal weighted fusion pedestrian detection algorithm [J]. Computer Engineering, 2021,47(8):234-242. | |
| 60 | BENJUMEA A, TEETI I, CUZZOLIN F, et al. YOLO-Z: improving small object detection in YOLOv5 for autonomous vehicles [EB/OL]. (2021-12-22) [2023-06-03]. . |
| 61 | YU J, YE X, TU Q. Traffic sign detection and recognition in multiimages using a fusion model with YOLO and VGG network [J]. IEEE Transactions on Intelligent Transportation Systems, 2022, 23(9): 16632-16642. |
| 62 | MAO K, JIN R, YING L, et al. SC-YOLO: provide application-level recognition and perception capabilities for smart city industrial cyber-physical system [J]. IEEE Systems Journal, 2023, 17(4): 5118-5129. |
| 63 | ZHANG X, YANG W, TANG X, et al. A fast learning method for accurate and robust lane detection using two-stage feature extraction with YOLOv3 [J]. Sensors, 2018, 18(12): 4308. |
| 64 | 张翔, 唐小林, 黄岩军. 道路结构特征下的车道线智能检测 [J].中国图象图形学报, 2021, 26(1): 123-134. |
| ZHANG X, TANG X L, HUANG Y J. Intelligent detection of lane based on road structure characteristics [J]. Journal of Image and Graphics, 2021, 26(1): 123-134. | |
| 65 | WU D, JIA F, CHANG J, et al. The 1st-place solution for CVPR 2023 OpenLane topology in autonomous driving challenge [EB/OL]. (2023-06-16) [2023-08-01]. . |
| 66 | JENSEN M B, NASROLLAHI K, MOESLUND T B. Evaluating state-of-the-art object detector on challenging traffic light data [C]// Proceedings of the 2017 IEEE Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2017: 882-888. |
| 67 | 钱伍, 王国中, 李国平. 改进YOLOv5的交通灯实时检测鲁棒算法[J]. 计算机科学与探索, 2022, 16(1): 231-241. |
| QIAN W, WANG G Z, LI G P. Improved YOLOv5 traffic light real-time detection robust algorithm[J]. Journal of Frontiers of Computer Science & Technology, 2022, 16(1): 231-241. | |
| 68 | 孙迎春,潘树国,赵涛,等.基于优化YOLOv3算法的交通灯检测[J].光学学报,2020,40(12): 1215001. |
| SUN Y C, PAN S G, ZHAO T, et al. Traffic light detection based on optimized YOLOv3 algorithm [J]. Acta Optica Sinica, 2020, 40(12): 1215001. | |
| 69 | EVERINGHAM M, GOOLL VAN, WILLIAMS C K I, et al. The PASCAL Visual Object Classes (VOC) challenge [J]. International Journal of Computer Vision, 2010, 88: 303-338. |
| 70 | LIN T-Y, MAIRE M, BELONGIE S, et al. Microsoft COCO: common objects in context [EB/OL]. (2014-05-01) [2023-06-04]. . |
| 71 | DENG J, DONG W, SOCHER R, et al. ImageNet: a large-scale hierarchical image database [C]// Proceedings of the 2009 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2009: 248-255. |
| 72 | KUZNETSOVA A, ROM H, ALLDRIN N, et al. The open images dataset v4: unified image classification, object detection, and visual relationship detection at scale [J]. International Journal of Computer Vision, 2020, 128: 1956-1981. |
| 73 | GEIGER A, LENZ P, URTASUN R. Are we ready for autonomous driving? The KITTI vision benchmark suite [C]// Proceedings of the 2012 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2012: 3354-3361. |
| 74 | CAESAR H, BANKITI V, LANG A H, et al. nuScenes: a multimodal dataset for autonomous driving [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 11618-11628. |
| 75 | SUN P, KRETZSCHMAR H, DOTIWALLA X, et al. Scalability in perception for autonomous driving: Waymo open dataset [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 2443-2451. |
| 76 | HUANG X, CHENG X, GENG Q, et al. The ApolloScape dataset for autonomous driving [C]// Proceedings of the 2018 IEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops. Piscataway: IEEE, 2018: 1067-10676. |
| 77 | YU F, CHEN H, WANG X, et al. BDD100K: a diverse driving dataset for heterogeneous multitask learning [C]// Proceedings of the 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2020: 2633-2642. |
| 78 | ESS A, LEIBE B, VAN GOOL L. Depth and appearance for mobile scene analysis [C]// Proceedings of the 2007 IEEE 11th International Conference on Computer Vision. Piscataway: IEEE, 2007: 1-8. |
| 79 | DALAL N, TRIGGS B. Histograms of oriented gradients for human detection [C]// Proceedings of the 2005 IEEE Computer Society Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2005: 886-893. |
| 80 | JENSEN M B, PHILIPSEN M P, MØGELMOSE A, et al. Vision for looking at traffic lights: issues, survey, and perspectives [J]. IEEE Transactions on Intelligent Transportation Systems, 2016, 17(7): 1800-1815. |
| 81 | ZHU Z, LIANG D, ZHANG S H, et al. Traffic-sign detection and classification in the wild [C]// Proceedings in the 2016 IEEE Conference on Computer Vision and Pattern Recognition. Piscataway: IEEE, 2016: 2110-2118. |
| [1] | 潘烨新, 杨哲. 基于多级特征双向融合的小目标检测优化模型[J]. 《计算机应用》唯一官方网站, 2024, 44(9): 2871-2877. |
| [2] | 张英俊, 李牛牛, 谢斌红, 张睿, 陆望东. 课程学习指导下的半监督目标检测框架[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2326-2333. |
| [3] | 李烨恒, 罗光圣, 苏前敏. 基于改进YOLOv5的Logo检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(8): 2580-2587. |
| [4] | 徐松, 张文博, 王一帆. 基于时空信息的轻量视频显著性目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2192-2199. |
| [5] | 孙逊, 冯睿锋, 陈彦如. 基于深度与实例分割融合的单目3D目标检测方法[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2208-2215. |
| [6] | 姬张建, 杜娜. 基于改进VariFocalNet的微小目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2200-2207. |
| [7] | 刘越, 刘芳, 武奥运, 柴秋月, 王天笑. 基于自注意力机制与图卷积的3D目标检测网络[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1972-1977. |
| [8] | 葛超, 张嘉滨, 王蕾, 伦志新. 基于模型预测控制的自动驾驶车辆轨迹规划[J]. 《计算机应用》唯一官方网站, 2024, 44(6): 1959-1964. |
| [9] | 耿焕同, 刘振宇, 蒋骏, 范子辰, 李嘉兴. 基于改进YOLOv8的嵌入式道路裂缝检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1613-1618. |
| [10] | 李鸿天, 史鑫昊, 潘卫国, 徐成, 徐冰心, 袁家政. 融合多尺度和注意力机制的小样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1437-1444. |
| [11] | 宋霄罡, 张冬冬, 张鹏飞, 梁莉, 黑新宏. 面向复杂施工环境的实时目标检测算法[J]. 《计算机应用》唯一官方网站, 2024, 44(5): 1605-1612. |
| [12] | 陈天华, 朱家煊, 印杰. 基于注意力机制的鸟类识别算法[J]. 《计算机应用》唯一官方网站, 2024, 44(4): 1114-1120. |
| [13] | 李雨秋, 侯利萍, 薛健, 吕科, 王泳. 基于内容解译的遥感图像推荐方法[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 722-731. |
| [14] | 李新叶, 侯晔凝, 孔英会, 燕志旗. 结合特征融合与增强注意力的少样本目标检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 745-751. |
| [15] | 王伟, 赵春辉, 唐心瑶, 席刘钢. 自适应地平线约束下的车辆三维检测[J]. 《计算机应用》唯一官方网站, 2024, 44(3): 909-915. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||