


《计算机应用》唯一官方网站 ›› 2024, Vol. 44 ›› Issue (7): 2285-2293.DOI: 10.11772/j.issn.1001-9081.2023071003
李华夏1, 黄晓蓉1,2,3, 沈安林1,2,3, 蒋鹏1, 彭忆强1,2,3( ), 隋立起4
), 隋立起4
收稿日期:2023-07-25
修回日期:2023-09-26
接受日期:2023-09-28
发布日期:2023-10-26
出版日期:2024-07-10
通讯作者:
彭忆强
作者简介:李华夏(1998—),男,四川成都人,硕士研究生,主要研究方向:轮式移动机器人运动控制;基金资助:
Huaxia LI1, Xiaorong HUANG1,2,3, Anlin SHEN1,2,3, Peng JIANG1, Yiqiang PENG1,2,3(), Liqi SUI4
Received:2023-07-25
Revised:2023-09-26
Accepted:2023-09-28
Online:2023-10-26
Published:2024-07-10
Contact:
Yiqiang PENG
About author:LI Huaxia, born in 1998, M. S. candidate. His research interests include motion control of wheeled mobile robot.Supported by:摘要:
针对现有运动控制策略无法保证独立驱动脚轮式全向移动平台位姿的高精度控制问题,提出一种基于模型预测控制(MPC)和PID控制相结合的双闭环轨迹跟踪控制策略。首先,利用运动学几何关系建立独立驱动脚轮式全向移动平台在世界坐标系下的三自由度运动学模型,基于正交分解法建立平台在机器人坐标系下的逆运动学模型,以反映平台中心点速度与各个脚轮转速间的关系;其次,采用MPC并基于三自由度运动学模型设计位姿控制器,使平台对期望轨迹进行位姿跟踪,并在考虑多目标约束条件的情况下通过位姿控制器求解出最优控制量;最后,采用PID设计速度控制器,用于跟踪位姿控制器输出的期望速度,通过平台逆运动学模型计算得到期望轮速,从而驱动平台实现全向运动。通过仿真验证了所提控制策略的有效性,平台能有效跟踪直线轨迹和圆形轨迹。仿真结果表明,与通过平台转角逆运动学模型解耦驱动轮速的位置单环轨迹跟踪控制策略相比,加入速度内环后系统超调量下降97.23%,响应时间缩短36.84%。
中图分类号:
李华夏, 黄晓蓉, 沈安林, 蒋鹏, 彭忆强, 隋立起. 基于MPC和PID的脚轮式全向移动平台轨迹跟踪[J]. 计算机应用, 2024, 44(7): 2285-2293.
Huaxia LI, Xiaorong HUANG, Anlin SHEN, Peng JIANG, Yiqiang PENG, Liqi SUI. Trajectory tracking of caster-type omnidirectional mobile platform based on MPC and PID[J]. Journal of Computer Applications, 2024, 44(7): 2285-2293.
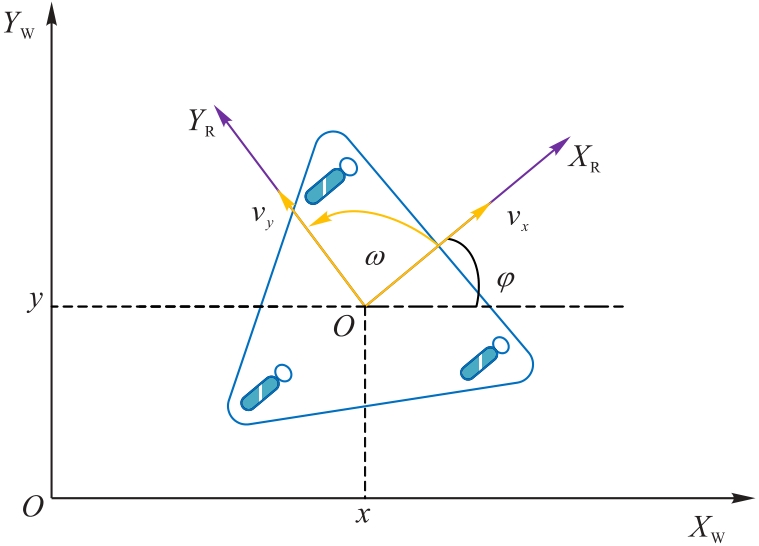
图1 世界坐标系下平台三自由度运动学模型
Fig. 1 Three-degree-of-freedom kinematic model of platform under world coordinate system
| 参数 | 含义 |
|---|---|
| 世界坐标系 | |
| 机器人坐标系 | |
| 脚轮式全向移动平台的横坐标位置 | |
| 脚轮式全向移动平台的纵坐标位置 | |
| 脚轮式全向移动平台的朝向角 | |
| 沿 | |
| 沿 | |
| 脚轮式全向移动平台自转角速度 |
表1 平台三自由度运动学模型符号参数说明
Tab. 1 Explanation of symbolic parameters for three-degree-of-freedom kinematic model of the platform
| 参数 | 含义 |
|---|---|
| 世界坐标系 | |
| 机器人坐标系 | |
| 脚轮式全向移动平台的横坐标位置 | |
| 脚轮式全向移动平台的纵坐标位置 | |
| 脚轮式全向移动平台的朝向角 | |
| 沿 | |
| 沿 | |
| 脚轮式全向移动平台自转角速度 |
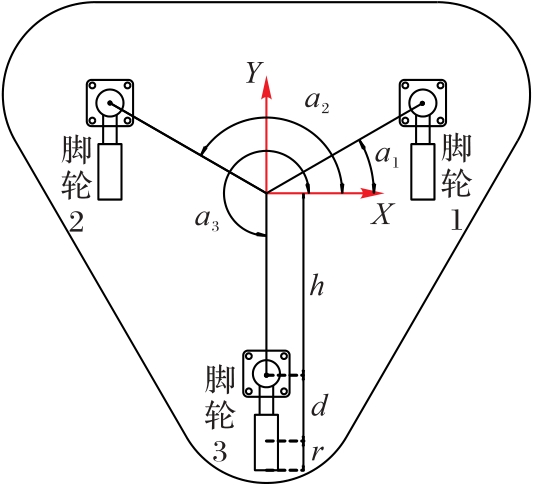
图2 平台结构示意图
Fig. 2 Schematic diagram of platform structure
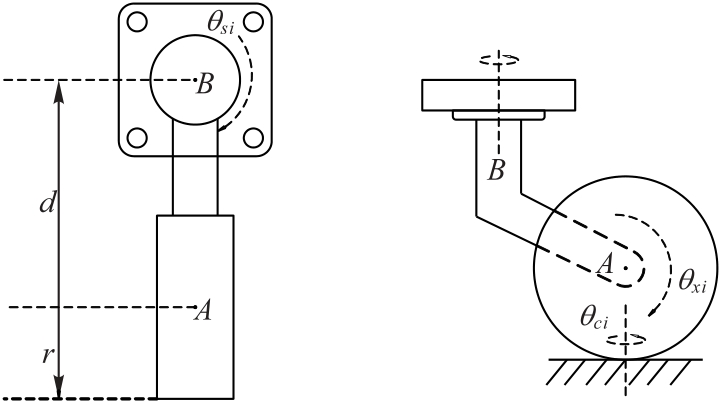
图3 脚轮结构示意图
Fig. 3 Schematic diagram of caster structure
| 符号 | 参数含义 | 取值 |
|---|---|---|
| 车轮中心 | ||
| 转向轴中心 | ||
| 轮地接触点 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮半径 | 0.1 m | |
| 转向轴中心与轮心的偏置距离 | 0.15 m | |
| 转向轴中心与平台中心连线长度 | 0.5 m | |
| 转向轴中心与平台中心连线与X轴的夹角 | ||
| 平台中心点的速度矢量 |
表2 机器人坐标系下平台运动学模型参数
Tab. 2 Kinematic model parameters of platform under robot coordinate system
| 符号 | 参数含义 | 取值 |
|---|---|---|
| 车轮中心 | ||
| 转向轴中心 | ||
| 轮地接触点 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮 | ||
| 脚轮半径 | 0.1 m | |
| 转向轴中心与轮心的偏置距离 | 0.15 m | |
| 转向轴中心与平台中心连线长度 | 0.5 m | |
| 转向轴中心与平台中心连线与X轴的夹角 | ||
| 平台中心点的速度矢量 |
| 方向 | |||
|---|---|---|---|
| 平行方向 | |||
| 垂直方向 |
表3 脚轮式全向移动平台速度正交分解表
Tab. 3 Speed orthogonal decomposition table for caster-type omnidirectional mobile platform
| 方向 | |||
|---|---|---|---|
| 平行方向 | |||
| 垂直方向 |
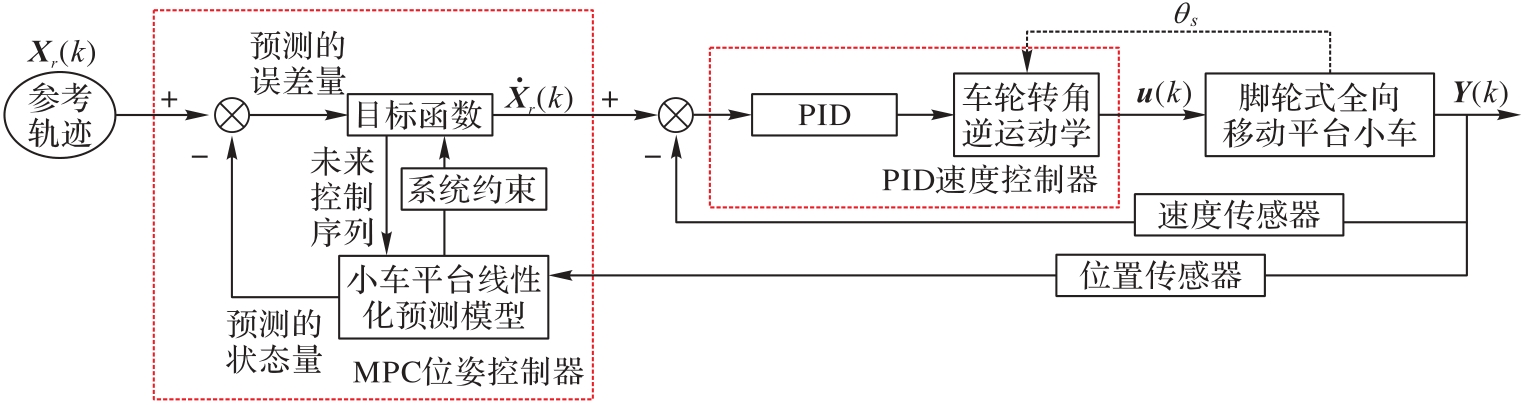
图4 MPC和PID双闭环控制框图
Fig. 4 MPC and PID double closed-loop control block diagram
| 控制器 | 参数 | 作用 |
|---|---|---|
| 位姿控制器 | 影响控制系统对轨迹跟踪的精确度和行驶稳定性 | |
| 影响系统的响应速度 | ||
| 影响控制系统执行算法的速率 | ||
| 保证控制系统对参考轨迹的跟踪精度 | ||
| 保证控制系统较为平稳的控制平台跟踪上参考轨迹 | ||
| 速度控制器 | 减少系统的偏差 | |
| 消除静差,提高系统的无差度 | ||
| 反映系统偏差的变化趋势,加快系统的响应 |
表4 MPC和PID双闭环控制策略关键参数作用说明
Tab. 4 Role description of key parameters of MPC and PID double closed-loop control strategy
| 控制器 | 参数 | 作用 |
|---|---|---|
| 位姿控制器 | 影响控制系统对轨迹跟踪的精确度和行驶稳定性 | |
| 影响系统的响应速度 | ||
| 影响控制系统执行算法的速率 | ||
| 保证控制系统对参考轨迹的跟踪精度 | ||
| 保证控制系统较为平稳的控制平台跟踪上参考轨迹 | ||
| 速度控制器 | 减少系统的偏差 | |
| 消除静差,提高系统的无差度 | ||
| 反映系统偏差的变化趋势,加快系统的响应 |
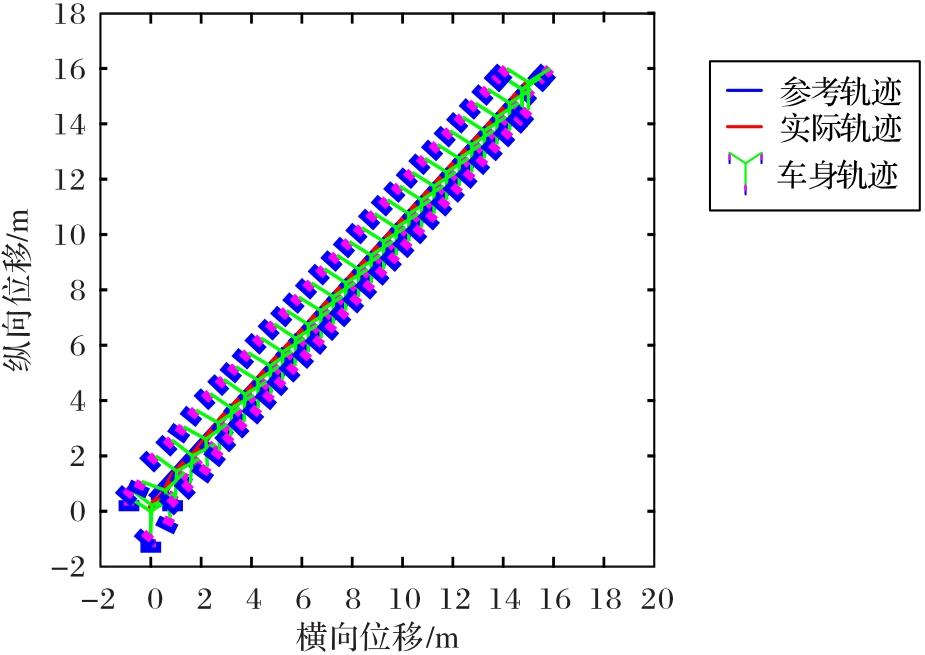
图5 车身直线跟踪轨迹
Fig. 5 Linear tracking trajectory of body
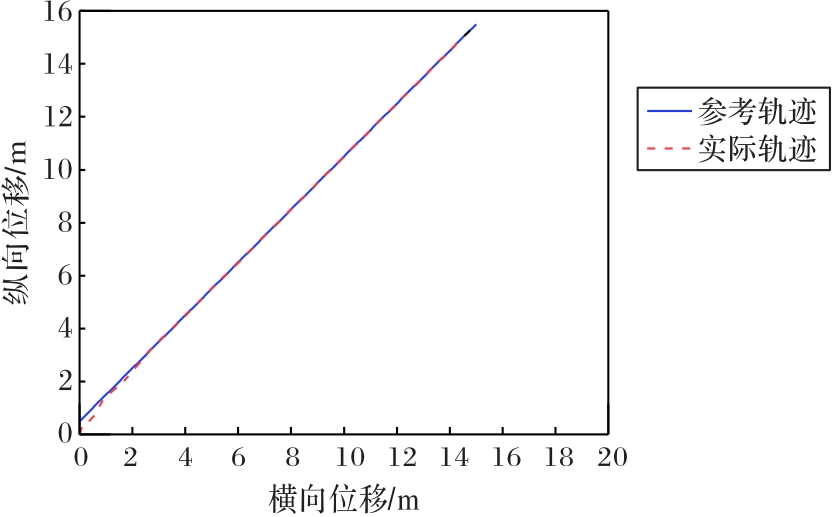
图6 直线轨迹跟踪曲线
Fig. 6 Tracking curve of linear trajectory
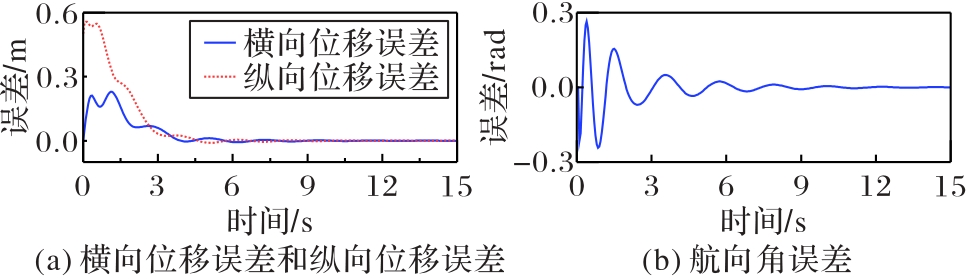
图7 直线轨迹跟踪位置误差
Fig. 7 Tracking position error of linear trajactory

图8 直线轨迹速度跟踪曲线
Fig. 8 Velocity tracking curve of of linear trajactory
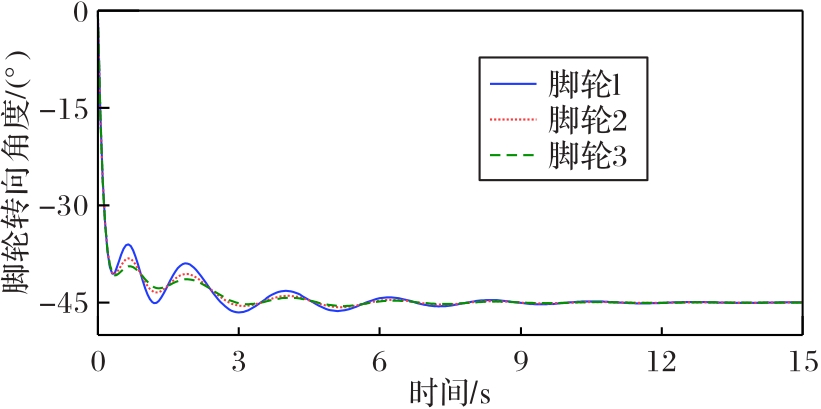
图9 直线轨迹脚轮转向角度曲线
Fig. 9 Castor steering angle curve of linear trajactory
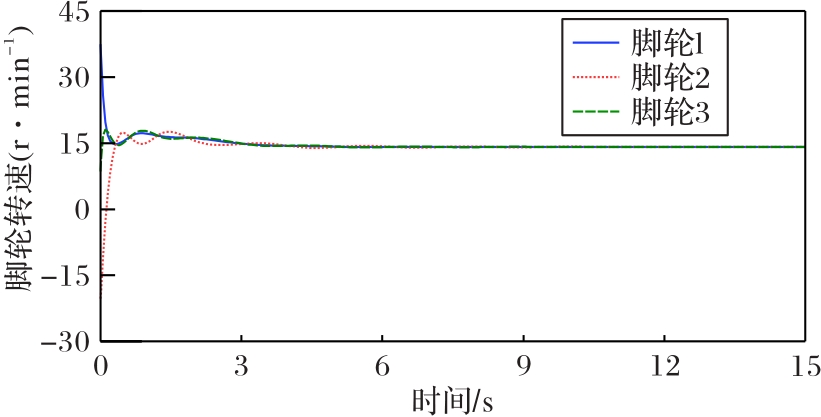
图10 直线轨迹脚轮转速曲线
Fig. 10 Caster speed curve of linear trajectory
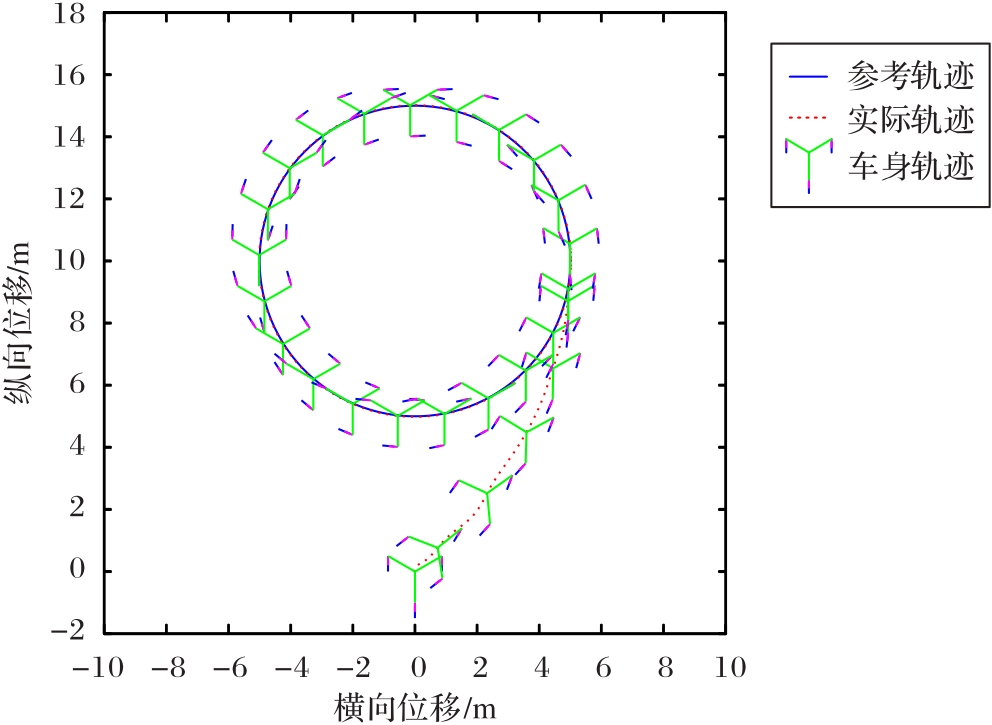
图11 车身圆形跟踪轨迹
Fig. 11 Circular tracking trajectory of body
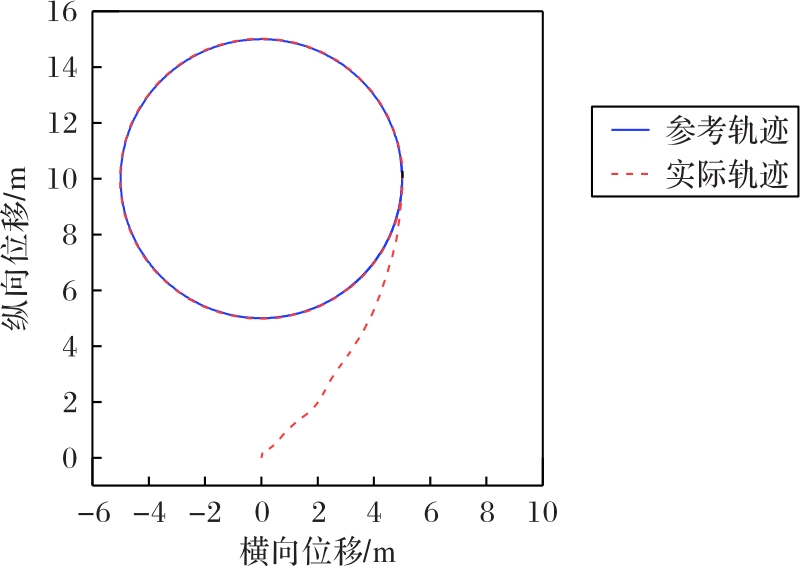
图12 圆形轨迹跟踪曲线
Fig. 12 Tracking curve of circular trajectory
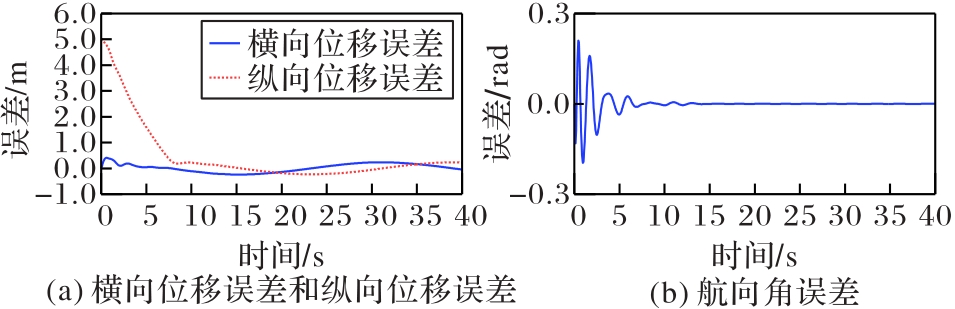
图13 圆形轨迹跟踪位置误差
Fig. 13 Tracking position error of circular trajectory

图14 圆形轨迹速度跟踪曲线
Fig. 14 Speed tracking curve of circular trajectory
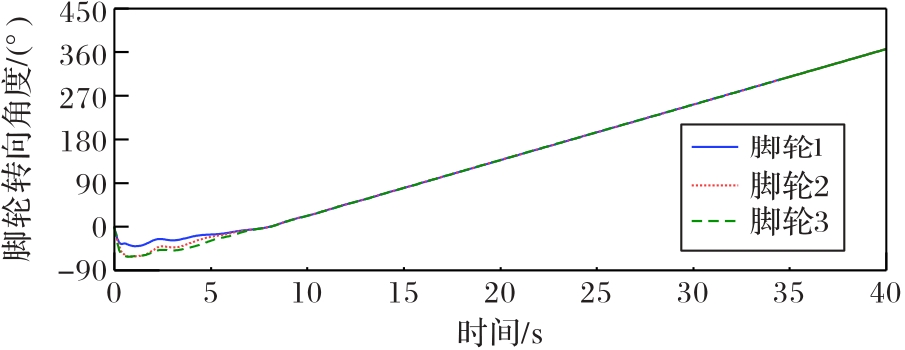
图15 圆形轨迹脚轮转向角度曲线
Fig. 15 Caster steering angle curve of circular trajectory
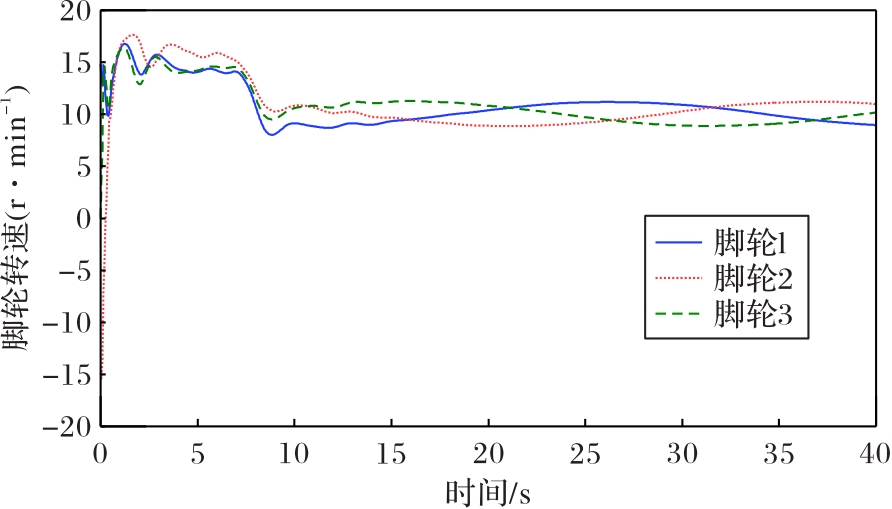
图16 圆形轨迹脚轮转速曲线
Fig. 16 Caster speed curve of circular trajectory
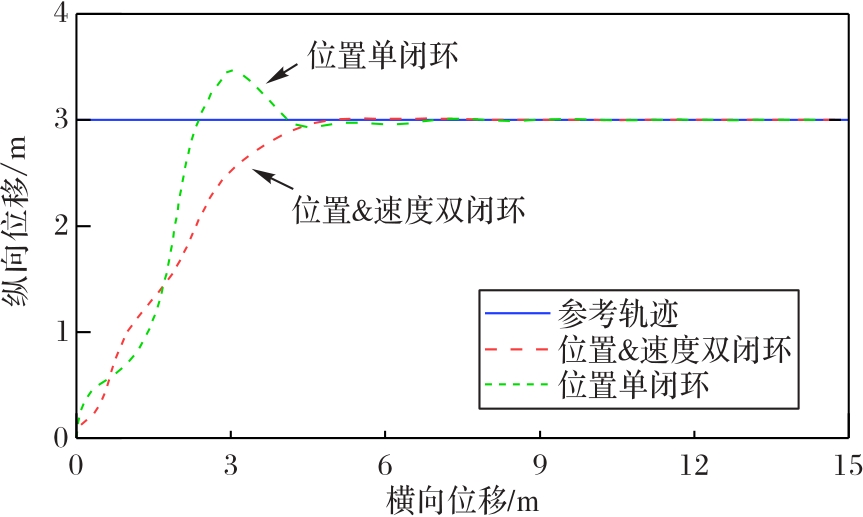
图17 直线工况下轨迹跟踪对比
Fig. 17 Comparison of trajectory tracking under linear conditions

图18 直线工况下轨迹跟踪误差对比
Fig. 18 Comparison of trajectory tracking error under linear conditions

图19 直线工况下速度跟踪曲线对比
Fig. 19 Comparison of speed tracking curves under linear conditions
| 1 | EL-SHENAWY A, WELLENREUTHER A, BAUMGART A S, et al. Comparing different holonomic mobile robots [C]// Proceedings of the 2007 IEEE International Conference on Systems, Man and Cybernetics. Piscataway: IEEE, 2007: 1584-1589. |
| 2 | CAO G, ZHAO X, YE C, et al. Fuzzy adaptive PID control method for multi-mecanum-wheeled mobile robot [J]. Journal of Mechanical Science and Technology, 2022, 36: 2019-2029. |
| 3 | ZHANG B, LI G, ZHENG Q, et al. Path planning for wheeled mobile robot in partially known uneven terrain [J]. Sensors, 2022, 22(14): 5217. |
| 4 | MONDAL S, RAY R, REDDY S, et al. Intelligent controller for nonholonomic wheeled mobile robot: a fuzzy path following combination [J]. Mathematics and Computers in Simulation, 2022, 193: 533-555. |
| 5 | ZHANG D, WANG G, WU Z. Reinforcement learning-based tracking control for a three mecanum wheeled mobile robot [J]. IEEE Transactions on Neural Networks and Learning Systems, 2024, 35(1): 1445-1452. |
| 6 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Kinematics and dynamics analysis for a holonomic wheeled mobile robot [C]// Proceedings of the 4th International Conference on Informatics in Control, Automation and Robotics. Angers, France: INSTICC Press, 2007: 485-491. |
| 7 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Dynamic model of a holonomic mobile robot with actuated caster wheels [C]// Proceedings of the 2006 9th International Conference on Control, Automation, Robotics and Vision. Piscataway: IEEE, 2006: 1-6. |
| 8 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Solving the singularity problem for a holonomic mobile robot [J]. IFAC Proceedings Volumes, 2006, 39(16): 151-156. |
| 9 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Controlling a holonomic mobile robot with singularities [C]// Proceedings of the 6th World Congress on Intelligent Control and Automation. Piscataway: IEEE, 2006: 8270-8274. |
| 10 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Inverse dynamic solution for holonomic wheeled mobile robot with modular wheel actuation [C]// Proceedings of the 2007 European Control Conference. Piscataway: IEEE, 2007: 5486-5491. |
| 11 | EL-SHENAWY A, WAGNER A, BADREDDIN E. Practical construction and position control of a modular actuated holonomic wheeled mobile robot [C]// Proceedings of the 2008 IEEE International Conference on Robotics and Automation. Piscataway: IEEE, 2008: 1672-1677. |
| 12 | 张天宇,彭忆强,黄晓蓉,等.脚轮式全向移动平台的运动控制设计与仿真[J].中国测试, 2021, 47(7): 109-118, 124. |
| ZHANG T Y, PENG Y Q, HUANG X R, et al. Motion control and simulation of caster wheeled omnidirectional mobile platform [J]. China Measurement & Testing Technology, 2021, 47(7): 109-118, 124. | |
| 13 | 黄晓蓉,张天宇,彭忆强,等.脚轮式全向移动平台负载变化时速度跟踪控制[J].西华大学学报(自然科学版), 2023, 42(2): 1-12, 19. |
| HUANG X R, ZHANG T Y, PENG Y Q, et al. Speed tracking control of caster-type omnidirectional mobile platform with variable load [J]. Journal of Xihua University (Natural Science Edition), 2023, 42(2): 1-12, 19. | |
| 14 | ZHANG Z, CHEN S, XU J, et al. Off-line identification of dynamic parameters of omnidirectional mobile robot based on decoupled powered caster wheels [C]// Proceedings of the 2022 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Piscataway: IEEE, 2022: 1321-1326. |
| 15 | JIANG S, LI Z, LIN S, et al. Design, control and experiments of an agile omnidirectional mobile robot with active suspension [C]// Proceedings of the 2022 IEEE 18th International Conference on Automation Science and Engineering. Piscataway: IEEE, 2022: 913-918. |
| 16 | YU Q, YANG G, DENG Y, et al. Energy-efficient trajectory planning for omnidirectional mobile robots with improved WDO algorithm [C]// Proceedings of the 2022 IEEE 17th Conference on Industrial Electronics and Applications. Piscataway: IEEE, 2022: 1116-1121. |
| 17 | MEDINA O, HACOHEN S. Overcoming kinematic singularities for motion control in a caster wheeled omnidirectional robot [J]. Robotics, 2021, 10(4): 133. |
| 18 | 张俊娜,白国星.基于速度调节与路径跟踪的差动机器人运动控制[J].工程科学学报, 2023, 45(9): 1550-1558. |
| ZHANG J N, BAI G X. Motion control of differential robot based on speed adjusting and path tracking [J]. Chinese Journal of Engineering, 2023, 45(9): 1550-1558. | |
| 19 | 杜荣华,胡鸿飞,高凯,等.基于变预测时域MPC的自动驾驶汽车轨迹跟踪控制研究[J].机械工程学报, 2022, 58(24): 275-288. |
| DU R H, HU H F, GAO K, et al. Research on trajectory tracking control of autonomous vehicle based on MPC with variable predictive horizon [J]. Journal of Mechanical Engineering, 2022, 58(24): 275-288. | |
| 20 | 许洋,秦小林,刘佳,等.多无人机自适应编队协同航迹规划[J].计算机应用, 2020, 40(5): 1515-1521. |
| XU Y, QIN X L, LIU J, et al. Multi-unmanned aerial vehicle adaptive formation cooperative trajectory planning [J]. Journal of Computer Applications, 2020, 40(5): 1515-1521. | |
| 21 | 王书亭,付清晨,蒋立泉,等.考虑绕障时耗的四轮全向移动机器人轨迹跟踪控制[J].华中科技大学学报(自然科学版), 2023, 51(6): 1-9. |
| WANG S T, FU Q C, JIANG L Q, et al. Trajectory tracking control of four-wheeled omnidirectional mobile robot considering time consumption in obstacle bypass [J]. Journal of Huazhong University of Science and Technology (Nature Science Edition), 2023, 51(6): 1-9. | |
| 22 | DING T, ZHANG Y, MA G, et al. Trajectory tracking of redundantly actuated mobile robot by MPC velocity control under steering strategy constraint [J]. Mechatronics, 2022, 84: 102779. |
| 23 | AZIZI M R, RASTEGARPANAH A, STOLKIN R. Motion planning and control of an omnidirectional mobile robot in dynamic environments [J]. Robotics, 2021, 10(1): 48. |
| 24 | LAFMEJANI A S, BERMAN S. Nonlinear MPC for collision-free and deadlock-free navigation of multiple nonholonomic mobile robots [J]. Robotics and Autonomous Systems, 2021, 141: 103774. |
| [1] | 胡映, 陈志环. 侧滑和打滑下的轮式移动机器人轨迹跟踪控制[J]. 《计算机应用》唯一官方网站, 2024, 44(7): 2294-2300. |
| [2] | 高胡震, 杜昌平, 郑耀. 基于扩张状态观测器的无人机云台系统控制算法[J]. 《计算机应用》唯一官方网站, 2024, 44(2): 604-610. |
| [3] | 张明, 付乐, 王海峰. 面向边缘计算的并发数据流接转控制模型[J]. 《计算机应用》唯一官方网站, 2024, 44(12): 3876-3883. |
| [4] | 陈宝, 周祖鹏, 卫欢, 吕延钊, 睢志成. 基于专家PID的带臂四旋翼无人机控制方法[J]. 《计算机应用》唯一官方网站, 2022, 42(8): 2637-2642. |
| [5] | 刘旭光, 杜昌平, 郑耀. 基于强化迭代学习的四旋翼无人机轨迹控制[J]. 《计算机应用》唯一官方网站, 2022, 42(12): 3950-3956. |
| [6] | 许洋, 秦小林, 刘佳, 张力戈. 多无人机自适应编队协同航迹规划[J]. 计算机应用, 2020, 40(5): 1515-1521. |
| [7] | 易康, 赵玉婷, 齐新社. 基于Octomap的仿人机器人局部环境与能力图模型算法[J]. 计算机应用, 2019, 39(4): 1220-1223. |
| [8] | 张永华, 杜煜, 潘峰, 魏岳. 基于三次B样条曲线拟合的智能车轨迹跟踪算法[J]. 计算机应用, 2018, 38(6): 1562-1567. |
| [9] | 罗蕊, 师五喜, 李宝全. 受侧滑和滑移影响的移动机器人自抗扰控制[J]. 计算机应用, 2018, 38(5): 1517-1522. |
| [10] | 蔡壮 张国良 田琦. 基于函数滑模控制器的机械手轨迹跟踪控制[J]. 计算机应用, 2014, 34(1): 232-235. |
| [11] | 张扬名 刘国荣 刘洞波 刘欢. 基于Lyapunov方法和快速终端滑模的轨迹跟踪控制[J]. 计算机应用, 2012, 32(11): 3243-3246. |
| [12] | 袁亮 吕柏权 张晨 梁伟. 用填充函数改进的智能控制系统全局优化算法[J]. 计算机应用, 2012, 32(02): 452-464. |
| [13] | 张国良 安雷 汤文俊. 三轮驱动移动机器人轨迹跟踪控制[J]. 计算机应用, 2011, 31(08): 2293-2296. |
| [14] | 王彦 刘宏立 王超. 基于FPAA的模糊自整定PID控制器设计[J]. 计算机应用, 2011, 31(02): 466-469. |
| [15] | 李述清 张胜修 张煜东 胡波. 连续搅拌反应釜过程的闭环增益成形PID控制器设计[J]. 计算机应用, 2011, 31(02): 483-484. |
| 阅读次数 | ||||||
|
全文 |
|
|||||
|
摘要 |
|
|||||